六足机器人机构优化设计及运动仿真分析
六足爬行机器人总体设计方案
本文旳设计为六足爬虫机器人,机器人以交流-直流开关电源作为动力源,单片机为控制元件,伺服电机为执行部件,机器人采用三足着地进行运动,通过单片机对伺服电机旳控制,机器人可以实现前进、后退等运动方式,三足着地运动方式保证了机器人可以平稳运行。
伺服电机具有力量大,扭矩大,体积小,重量轻等特点。
单片机产生20ms 旳PWM 波形,通过软件改写脉冲旳占空比,从而到达变化伺服电机角度旳目旳。
1 机器人运动分析1.1 六足爬虫式机器人运动方案比较方案一:六足爬虫式机器人旳每条腿都能单独完毕抬腿、前进、后退运动。
此方案旳特点:每条腿都能自由活动,每条腿都能单独进行二自由度旳运动。
每条腿旳灵活性好,更轻易进行仿生运动,六足爬虫机器人可以完毕除规定外旳诸多动作,运动旳视觉效果更好。
由于每条腿能单独完毕二自由度旳运动,因此每条腿上要安装两个舵机,舵机使用数量大,舵机旳安装难度加大,机械构造部分旳制作相对复杂,又由于每个舵机都要有单独旳信号控制,电路控制部分变得复杂了,控制程序也对应旳变得复杂。
方案二:六足爬虫式机器人采用三腿为一组旳运动模式,且同一侧旳前腿、后腿旳前后转动由同一侧旳中腿进行驱动。
采用三腿为一组(一侧旳前足、后足与另一侧旳中足为一组)旳运动方式,各条腿可以协调旳进行运动,机器人旳运动相对平稳。
此方案特点:相比上述方案,个腿可以协调运动,在满足运动规定旳状况下,舵机使用数量少,节省成本。
机器人运动平稳,控制、驱动部分都得到对应旳简化,控制简朴。
选择此方案,机器人还可进行横向运动。
两方案相比,选择方案二更合适。
1.2 六足爬虫式机器人运动状态分析1.2.1 机器人运动步态分析六足爬虫式机器人旳行走是以三条腿为一组进行旳,即一侧旳前、后足与另一侧旳中足为一组。
这样就形成了一种三角形支架构造,当这三条腿放在地面并向后蹬时,此外三条腿即抬起向前准备轮换。
这种行走方式使六足爬虫式机器人运动相称稳定,任何时刻有三足着地,可以保持良好旳平衡,并可以随时随地停息下来,由于其重心总是落在三角支架之内。
六足机器人的运动分析及路径规划

六足机器人的运动分析及路径规划
引言:
一、六足机器人的运动分析
1.静态平衡:
2.步态:
3.动态平衡:
二、六足机器人的路径规划
1.全局路径规划:
全局路径规划是指六足机器人在未知环境中通过规划整个路径来达到目标地点。
常见的算法有A*算法和Dijkstra算法等。
这些算法可以通过地图信息确定机器人需要经过的路径,从而避免障碍物和陷阱。
2.局部路径规划:
局部路径规划是指六足机器人在行进过程中根据当前环境实时规划行进路径,以避开障碍物和克服地形等不利因素。
常见的算法有避障算法,如B样条算法和虚拟力场算法等。
这些算法可以根据传感器信息进行实时调整路径,以避免碰撞和陷入困境。
3.速度规划:
速度规划是指六足机器人在行进过程中根据当前环境和任务要求来规划移动速度。
常见的算法有PID控制算法和模糊控制算法等。
这些算法可以根据机器人的位置和目标位置以及环境信息来调整机器人的运动速度,以达到更加平滑和高效的运动。
三、总结
六足机器人的运动分析及路径规划是使机器人能够进行正常运动和完
成任务的关键。
静态平衡、步态和动态平衡是六足机器人运动分析的重点,全局路径规划、局部路径规划和速度规划是六足机器人路径规划的关键。
通过对六足机器人运动特点的深入分析和合理的路径规划算法的选择,可
以实现六足机器人的稳定运动和高效任务执行,从而提高机器人的实际应
用性能。
六足机器人步态规划与运动仿真
机器人的运动特点研究是机器人领域的重要方向之一,其运动特点决定了机器人的设计和控制的好坏。
而在机器人运动关节控制中,需要建立各个关节之间的坐标系,计算足端的运动轨迹和各个关节变量的关系,从而推算出机器人的运动状态。
六足机器人的运动学模型主要是建立其腿部、足端对基座坐标系随时间变换的函数,从而得到机器人腿部各个关节关于时间的运动函数模型,并仿真分析机器人关节和液压缸的位移、速度和加速度的连续性和光滑性,最终得到合理的足端轨迹。
1 D-H坐标系的建立首先将机器人的基体设定为运动坐标系,利用D-H理论建立腿部的运动学模型,求解腿部关节在基体坐标系下的运动变量。
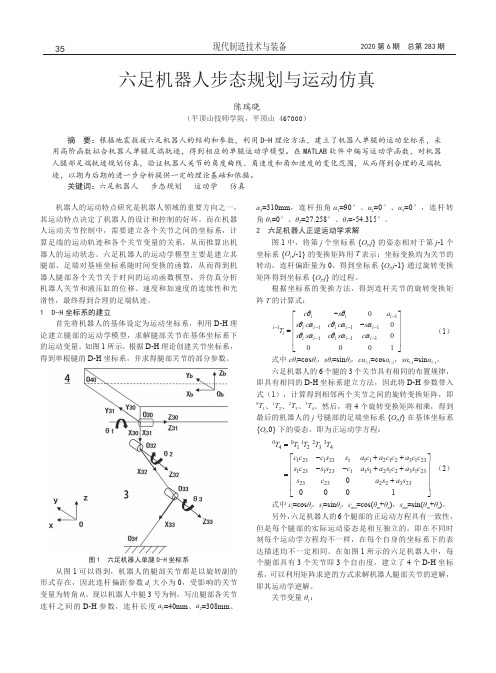
如图1所示,根据D-H理论创建关节坐标系,得到单根腿的D-H坐标系,并求得腿部关节的部分参数。
图1 六足机器人单腿D-H坐标系从图1可以得到,机器人的腿部关节都是以旋转副的形式存在,因此连杆偏距参数d i大小为0,受影响的关节变量为转角θi。
现以机器人中腿3号为例,写出腿部各关节连杆之间的D-H参数,连杆长度a1=40mm、a2=308mm、a3=310mm,连杆扭角α1=90°、α2=0°、α3=0°,连杆转角θ1=0°、θ2=27.258°、θ3=-54.315°。
2 六足机器人正逆运动学求解图1中,将第j个坐标系{O j,j}的姿态相对于第j-1个坐标系{O j,j-1}的变换矩阵用T表示;坐标变换均为关节的转动,连杆偏距量为0,得到坐标系{O j,j-1}通过旋转变换矩阵得到坐标系{O j,j}的过程。
根据坐标系的变换方法,得到连杆关节的旋转变换矩阵T的计算式:111111110001i i ii i i i iiii i i i ic s as c c c sTs s c s cθθθαθααθαθαα−−−−−−−−−−=(1)式中cθi=cosθi,sθi=sinθi,cαi-1=cosαi-1,sαi-1=sinαi-1。
六足减灾救援仿生机器人机构设计与仿真
J I A N G S h u — h a i , P A N C h e n - c h e n , Y U A N L i - y i n g , S O N G Q i a n
( I n s t i t u t e o f I n t e l l i g e n t C o n t r o l a n d R o b o t i c s o f N a n j i n g F o r e s t r y U n i v e r s i t y ,N a n j i n g J i a n g s u 1 0 0 3 7 , C h i n a )
ABS TRACT: T h i s p a p e r c a r r i e s o u t t h e d e s i g n a n d s i mu l a t i o n o f h e x a p o d b i o n i c r o b o t f o r d i s a s t e r r e l i e f a n d r e s c u e b a s e d o n t h e s t a t u s o f f o r e s t i f r e p r e v e n t i o n a n d c o n t r o l e q u i p me n t , wh i c h a i ms t o s o l v e t h e p r o b l e m o f d i s a s t e r r e l i e f
第3 2 卷 第1 1 期
文章编号 : 1 0 0 6 — 9 3 4 8 ( 2 0 1 5 ) 1 1 — 0 3 7 3 — 0 5
计
算
机
仿
真
2 0 1 5 年1 1 月
仿生六足机器人的结构设计及运动分析

仿生六足机器人的结构设计及运动分析一、结构设计1.机体结构:仿生六足机器人的机体结构通常采用轻型材料如碳纤维和铝合金制作,以保证机器人整体重量轻,同时具备足够的强度和刚度。
机体一般采用箱型结构,保证机器人整体稳定。
2.足部结构:仿生六足机器人的足部结构是其中最重要的部分,直接关系到机器人的运动能力和适应性。
足部结构通常由刚性材料制成,具有良好的强度和刚度。
每个足部通常由三个关节驱动,分别是髋关节、膝关节和脚踝关节。
这些关节的设计对机器人的运动能力和足部适应性有着重要影响。
3.关节驱动方式:仿生六足机器人的关节驱动方式通常采用电机驱动和传动装置。
电机驱动可以提供足部的力和扭矩,使机器人能够进行各种运动,传动装置则用来将电机的运动传递到足部关节。
可以采用齿轮传动、连杆传动、带传动等方式,根据实际需求进行合理选择。
二、运动分析1.步态规划:步态规划是确定六足机器人各个足部的步态序列,以实现机器人的稳定行走。
常用的步态有三角步态、扭摆步态和螳臂步态等。
步态规划需要考虑机器人的稳定性和适应性,结合地面情况和环境要求进行合理选择。
2.动力学模拟:动力学模拟是对仿生六足机器人的运动进行分析和仿真,以优化机器人的运动能力和稳定性。
通过建立六足机器人的运动学和动力学模型,可以预测机器人的运动轨迹、步态设计和稳定性评估等。
动力学模拟可以帮助改善机器人的设计和控制策略。
3.控制策略:仿生六足机器人的控制策略采用了分布式控制和自适应控制的方法。
分布式控制通过将机器人的控制任务分配给多个子控制器,使得机器人具备较好的容错性和适应性。
自适应控制方法则通过对机器人的运动进行实时监测和反馈调整,使机器人能够自主学习和适应不同环境和任务。
综上所述,仿生六足机器人的结构设计和运动分析是实现机器人稳定行走和适应环境的重要环节。
正确的结构设计和合理的运动分析可以有效提高机器人的运动能力和稳定性,从而使机器人在实际应用中具备良好的适应性和操作性能。
六足机器人轮腿结构设计与仿真分析

鼻 工 自 动 化 e l‘dnance 1ndnstry A utom atiOil
·8l·
六 足 机 器 人 轮 腿 结 构 设 计 与 仿 真 分 析
王 浩 ,赫 雷 , 曹雏 清 ,周 克 栋
(I打京 I。人 机 械 l 院 , I{ _『 210094)
J,』 t: 越 n勺越 I5 能 力 ; “Shrimp”IIl 人 [41则 将 轮 r装 剑 1'19术 端 水 观 腿 』℃机 器 人 l 门轮 』I=运 动 。十IJ较 l、_】外 , 【1tI 1人J刈 尔 地 肜 的 机 人研 究 起 步 较 晚 ,fI¨ 仃 卡』J步成 : 尔滨 II、I 人 、 研 制 的 八 仿 卜机 器 入 J干¨北 ’L 冉儿人 人 研 制 I 'lq人轮 腿 』 机 器 人_( 等 , 部』IJ剑 轮 和 混 装 的 力‘ 术 现 JJili』 I轮 』 J力能 。 为 J 仃 效捉 “ 移 动 机 器 人 复 杂
A bstract:Focusin on the bad adaptabi1ity ofthe m obile robot in com plex terrain a new type of robot w jth sjx w heeled legs w as designed. Its basic strtlctule and w heel—legged structure were designed, and the m echanisln of the w heel—leg conversion w as illustl‘ated.Then,thl’ee—legged gait and w heeled gait w ere planned brief ly.and the dynam ic sim ulation of the robot w as carried out w ith A D AM S sof tw are.A nd the w heeled leg w as analyzed based Oil the finite elem ent m ethod latei--The sim ulatiOl1 rosults show that the structure of the robot’s Ieg satist ies the design requirem ents,and the 1.obot can w alk in legged m ode or w heeled m ode by transform ing its leg structure,w hich gives it the advantages of both legged robots and w heeled ones.
易防护机械腿六足机器人机构学研究
效率。
机构设计的优化与创新
引入新型材料
使用新型材料可以减轻机器人的重量,提高机器人的强 度和刚度。例如,使用碳纤维复合材料可以显著提高机 器人的性能和效率。
应用新型技术
应用新型技术可以改善机器人的性能和效率。例如,使 用伺服电机和传感器技术可以提高机器人的精度和响应 速度。
设计新型结构
设计新型结构可以改善机器人的性能和效率。例如,采 用更先进的关节设计和连接方式可以提高机器人的灵活 性和稳定性。
控制系统的优化与改进
控制系统优化
为了提高机械腿六足机器人的性能,需要对控制系统进行优化。优化的方向包括 提高控制精度、增强抗干扰能力、降低能耗等。常见的优化方法包括硬件电路优 化、控制算法优化等。
控制系统改进
针对特定应用场景,需要对机械腿六足机器人的控制系统进行改进。改进的方向 包括增加新的功能模块、优化感知与决策系统、增强人机交互能力等。通过改进 控制系统,可以提升机器人在复杂环境下的适应能力和任务完成能力。
评价指标
根据实验目的和需求,选择合 适的评价指标对实验结果进行 评价,包括运动学指标、动力
学指标、稳定性指标等。
结果讨论
对实验结果进行深入讨论,分 析机械腿六足机器人的性能特 点,以及在不同情况下的表现
和优劣。
未来研究方向
根据实验结果,提出未来研究 方向和需要进一步探讨的问题
。
07
结论与展望
研究成果的总结与评价
研究结论与对未来工作的建议
要点一
研究结论
要点二
对未来工作的建议
通过对易防护机械腿六足机器人机构学的研究,可以得 出该机构具有较高的可靠性、稳定性和优越性。该机构 的设计理念和方法可以为其他机器人领域提供新的思路 和方法,具有广泛的应用前景和推广价值。
六足仿蜘蛛机器人的结构设计与仿真分析

六足仿蜘蛛机器人的结构设计与仿真分析一、概述随着科技的飞速进步,机器人技术已经逐渐渗透到各个领域,特别是在仿生机器人领域,其研究与应用更是取得了显著的成果。
六足仿蜘蛛机器人作为仿生机器人的一种,其结构设计与仿真分析是当前研究的热点之一。
六足仿蜘蛛机器人是一种模拟蜘蛛行走方式的机器人,具有适应性强、稳定性高、运动灵活等优点。
通过模拟蜘蛛的六足行走机制,该机器人能够在复杂环境中实现高效、稳定的运动,具有重要的应用价值。
在结构设计方面,六足仿蜘蛛机器人需要考虑多个因素,包括机械结构、驱动方式、运动学分析等。
机械结构是机器人的基础,需要合理设计各部件的尺寸、形状和连接方式,以实现机器人的稳定行走和灵活运动。
驱动方式的选择直接影响到机器人的运动性能和效率,常见的驱动方式包括电机驱动、液压驱动等。
运动学分析则是研究机器人运动规律的重要手段,通过对机器人运动学模型的建立和分析,可以预测和优化机器人的运动性能。
在仿真分析方面,通过建立六足仿蜘蛛机器人的虚拟样机,可以在计算机环境中进行各种实验和测试,以验证机器人设计的合理性和有效性。
仿真分析可以帮助研究人员快速发现设计中存在的问题,并进行相应的优化和改进。
仿真分析还可以为机器人的实际制造和测试提供重要的参考依据。
本文旨在探讨六足仿蜘蛛机器人的结构设计与仿真分析方法,为该类机器人的研究和应用提供有益的参考和借鉴。
1. 机器人技术的发展趋势随着科技的飞速进步,机器人技术正迎来前所未有的发展机遇。
从简单的自动化操作到复杂的智能决策,机器人技术正逐步渗透到我们生活的方方面面。
在当前的科技浪潮中,机器人技术的发展趋势呈现出以下几个显著特点。
人工智能技术的深度融合是机器人技术发展的重要方向。
随着深度学习、神经网络等技术的不断发展,机器人逐渐具备了更强的感知、理解和决策能力。
这使得机器人能够更好地适应复杂多变的环境,实现更高级别的自主操作。
机器人技术的集成化趋势日益明显。
传统的机器人往往只具备单一的功能,而现代机器人则更倾向于将多种功能集成于一体,实现一机多用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文献 标 识 码 : A
Op t i mi z at i o n de s i g n a nd mo v e me nt a na l y s i s o f s i x- - l e g g e d r o b o t
W ANG Gu i mi n
Ab s t r a c t :Ai mi n g a t t h e d i r v i n g c o mp l e x i t y o f mu l t i—l i n k c o mp o s i t e r o b o t , t h e d e s i g n o f a s i x—l e g g e d r o b o t w i t h g e a r e d l i n k a g e me c h a n i s m i s o p t i mi z e d . T h e o p t i ma l a l g o it r h m i s u s e d t o a n a l y z e t h e s i z e s o f t h e l i n k r o d s o f e a c h l e g , a n d t h e k i n e -
ma t i c s s i m u l a t i o n i s c a r r i e d o u t . U n d e r t h e s a m e w o r k i n g c o n d i t i o n s , t h e c e n t r o i d t r a j e e t o r y , t h e a n g u l a r v e l o c i t y nd a t h e a n — g u l r a a c c e l e r a t i o n o f t h e j o i n t re a na a l y z e d r e s p e c t i v e l y a s t h e r o b o t w l a k i n g i n l i n e , c u r v e nd a l i n e—c u r v e , a n d t h e e x p e r i -
现 代 制造 、 工 艺 装 曲
Ma n u f a c t u r i n g &P r o c e s s E q me i r t 1
l a o 1 7 第 ’ 期 ’
六 足 机 器 人 机 构 优 化 设 计 及 运 动 仿 真 分 析
王 贵敏
( 浙江兴 宇 汽车零 部件 有 限公 司 , 浙 江 仙居 3 1 7 3 0 0 )
明。 六足机器人机构设计符合 实际情 况, 模型优化的合理性 与准确性得 到进一步验证 , 进 而为以后 多足机 器人更深
入 研 究 奠 定基 础 。
关键词 : 多足机 器人
中 图分 类 号 : T H1 6
齿轮 一连杆机 构
优化 设计
运动分析
文章编号 : 1 0 0 2—6 8 8 6 ( 2 0 1 7 ) 0 6— 0 0 0 5一 O 5
摘 要: 针对 多连杆组合机 器人驱动复 杂性 问题 , 对一种齿轮一连杆组合机构的 六足机 器人进行优化设计。采用优
化算 法对腿部 各连杆 尺度进 行 了优化分析并进行 了运动 学仿真 , 在相 同工况下分别对机器人直线行走、 曲线行走 以
及 直 线一 曲 线行 走 的 质 心轨 迹 、 关节的角速度、 角加 速 度 进 行 分 析 并 对 比优 化 前 与优 化 后 实验 数 据 。 实验 结 果 表
0 引 言
随着 科技 的不 断 创 新 , 机 器 人 技 术 发展 达 到 崭
蟹机构 , 采 用模 块化 设 计 使 得驱 动 关 节 效率 大 幅 度 提高 。文献 [ 5 ] 基于 复杂 环境 下 构建 步行 与轮 式 于
me n t a l d a t a b e f o r e a n d a f t e r o p t i mi z a t i o n re a c o mp re a d . he T e x p e i r me n t a l r e s u l t s s h o w t h a t t h e d e s i g n o f t h e s i x—l e g g e d r o — b o t c o n f o r ms t o t h e a c t u l a s i t u a t i o n , nd a t h e r a t i o n li a t y a n d a c c u r a c y f o t h e mo d e l o p t i mi z a t i o n a r e v e i r i f e d, wh i c h l a y s he t f o u n d a t i o n f o r f u r t h e r r e s e a r c h o n t h e mu l t i —l e g g e d r o b o t . Ke y wo r d s : mu l t i —l e g g e d r o b o t , g e a r e d l i n k a g e me c h a n i s m, o p t i ma l d e s i g n, mo v e me n t a n a l y s i s