PUMA560机器人运动学分析
基于MATLAB的PUMA机器人运动仿真研究
基于MATLAB的PUMA机器人运动仿真研究摘要:机器人运动学是机器人学的一个重要分支,是实现机器人运动控制的基础。
论文以D-H坐标系理论为基础对PUMA560机器人进行了参数设计,利用MATLAB机器人工具箱,对机器人的正运动学、逆运动学、轨迹规划进行了仿真。
Matlab仿真结果说明了所设计的参数的正确性,能够达到预定的目标。
关键词:机器人PUMA560 D-H坐标系运动学轨迹规划机器人运动学的研究涉及大量的数学运算,计算工作相当繁锁。
因此,采用一些工具软件对其分析可大大提高工作效率,增加研究的灵活性和可操作性。
对机器人进行图形仿真,可以将机器人仿真的结果以图形的形式表示出来,从而直观地显示出机器人的运动情况,得到从数据曲线或数据本身难以分析出来的许多重要信息,还可以从图形上看到机器人在一定控制条件下的运动规律[1]。
论文首先设计了PUMA560机器人的各连杆参数,然后讨论了正、逆运动学算法,轨迹规划问题,最后在MATLAB环境下,运用Robotics Toolbox,编制简单的程序语句,快速完成了机器人得运动学仿真。
设机械手起始位置位于A点,qA=[000000],即表示机器人的各关节都处于零位置处。
机械手在B点和C点相对于基坐标系的位姿可用齐次变换矩阵TB和TC来表示。
图2所示为机械手臂在A点时的三维图形。
可通过matlab编程来给出机器人由A运动到B,转动关节2和转动关节3的角度随时间变换的仿真图,如图3所示。
图4所示为末端关节沿x,y,z方向的运动轨迹。
取仿真时间为2s,采样间隔为0.056s。
从图3可以看出:在所取的仿真时间内,转动关节2由零逐渐变化到1.5708rad;转动关节3由零逐渐变化到-1.5708rad。
图4说明机器人由A运动到B,末端关节沿x,y,z方向位移矢量的变化轨迹,证明机器人可以实现不同方位的姿态。
通过仿真曲线可以观察到机器人从A运动到B时各关节的运动情况,且各关节运动情况均为正常,各连杆没有运动错位的情况,从而验证了所有连杆参数的合理性,且说明了各参数的设计能够实现预定的目标。
基于MATLAB的PUMA560机器人运动学仿真

1 P U M A 5 6 0 机器人参数设计
1 . 1连杆参数和坐标系
一
究。 开式运动链一端固定在基座上 , 另一端不固定 , 利用末端 执 行器 来操纵物体 以完成各种任 务。 驱动器使关节运动 , 并带 动
连杆运动, 使手爪到达所规定的位姿。 轨 迹 规 划 的过 程 中, 重 点研 究 操作 臂 末 端执 行 器 相 对
从数据 曲线或数 据本 身难以分析出来 的许 多重 要信息, 还 可以 从图形上看到机器人在一定控制条件下的运动规律 。 一个新 的 机 器人 工作程序 编制完成后, 先在仿真软件中观 察运行 结果, 分析检验轨 迹规 划和作业规划 的正确性和合 理性 , 为离线编程 依据给定的连杆坐标系, 相关的连杆参数可规定如下: 1 ) a 为沿 i 轴, 从z 移动至z 的距 离。
自由度 的P U M A 5 6 0 机 器人 进行 参 数 设 然 后 讨 论 了正、 逆 运 动 机器人 操作臂运 动学方程的研究 内容 , 为操作 臂各个连 杆 学算法 , 轨 迹规划 问题 , 最 后在M A T L A B 环境下, 运 用机器人工 间的位移关系、 速度 关系及加速度关 系。 连杆通过移动或转 动 具箱编制简单的程 序语句 , 快速完成了机器人 的运动学仿真 。 关节 串联形成机器人操作臂, 可 以作为一个 开式运动链进行研
实验研究 ・
基于MA T L A B的P UMA5 6 0 机器人运动学仿真
董慧颖 梁 爽( 沈阳 理工 大学, 辽 宁 沈阳 1 1 0 0 5 9 )
摘 要: 随着机器人技术的发展和应用, 机器人在现代 工业生产中扮演着越来越重要的角色。 机器人诞生是科学技术与社会进步的必然 结果 , 从根 本 上 改变 了 原来传 统的生产体 系和生产 方式 。 本 文在 M A T L A B  ̄境 下, 对P U M A 5 6 0 机 器人 进行 参 数设计, 分 析P U M A 5 6 0 机 器人 的运
PUMA560机构的运动学性能分析
构 值较大,机器人的控制精度较好。 2.4 加速度全域性能指标分析 根据式 (5) 可以计算该机构的加速度性能, 由 于该机构的角速度为一定值, 所以其角加速度亦为 一平面,在此不再画出。根据式 (11) 计算出该机 构沿 , 方向,即二阶影响系数矩阵的第 4 层和第 5 层矩阵的线加速度图谱,如图 3、图 4 所示。
35
3
/mm
3
结论
整体来说, 通过上述的讨论可以初步得出对于
25
该机构来说, 2 ,
15
3
同时增加有助于线速度性能的
提高。在 2减少,同时 3增大时 方向线加速度性能 较好;而在 2 ,
3
同时减少时 方向线加速度性能较
5 100
120
140
2
160 /mm
180
200
好。 综上所述, 通过观察图谱随机构尺寸变化的趋 势, 为设计性能优异的机构提供理论依据。本文通 过对串联 PUMA560 机构研究分析, 利用速度和加 速度全域性能指标, 对该机构进行了全域性能指标 分析,并依据各个性能指标差异,在众多同类机构 中挑选出性能较优的机构。
参考文献
[1] Steward D A. Platfrom with 6-DOE Proc [J]. Institution of Mech-
图3
方向线加速度图谱
Fig. 3 Altas of the linear acceleration in direction
55
45
35 /mm
anical Engineering, 1965,18 (1): 371-386. [2] 郭希娟. 并联机器人机构动力学基础理论研究 [D]. 秦皇岛 :
7 PUMA机器人运动学

如果末端连杆的位姿已经给定,求关节变量的值称为运动学反解。 Paul等人建议用未知的连杆逆变换左乘方程两边,把关节变量分 离出来,从而求解,具体步骤如下。
上海电机学院 机械学院
1.首先解出θ1,
0 1 0 1 0 1 2 3 4 5 T 1 (1 )0 T T ( ) T ( ) T ( ) T ( ) T ( ) T ( ) 6 1 1 1 1 2 2 3 3 4 4 5 5 6T (6 )
上海电机学院 机械学院
通常,把反解存在的区域称为该机器人的工作空间。 严格地讲,工作空间分成两种: (1)灵活空间,系指机器人手爪能以任意方位到达的目标点 的几何; (2)可达空间,系指机器人手爪至少能以一个方位到达的目 标点的集合。 灵活空间是可达空间的子集,在灵活空间的各点上,抓手的指向 可以任意规定。 在三维空间中,当操作臂的自由度小于6时,其灵活空间的体积为 零,不能在三维空间内获得一般的目标位姿。
(2)解的多重性。
(3)求解方法的多样性。
上海电机学院 机械学院
一、解的存在性和工作空间 如图所示的2R机械手,两连杆长度分别为l1、l2,两旋转关节 平行,其运动方程为:
反解关心的问题是:对于给定的位置矢 量(x,y),由运动学方程求出相应的 关节矢量。 求解之前最关心的问题是,对于给定的 值(x,y),相应的关节矢量是否存在。
求2在矩阵方程??????65654543432321210106ttttttt?两端左乘逆变换103?tt66t55t44t66t33543010??上海电机学院机械学院方程两边的元素14和34分别对应相等得上海电机学院机械学院s23和c23表达式的分母相等且为正于是根据解1和3的四种可能组合可以得到相应的3四种可能值于是可得到的四种可能解???3232??式中2取和3对应的值
基于MATLAB的PUMA560机械臂运动仿真

基于MATLAB的PUMA560机械臂运动仿真徐哲扬来源:?读天下?2021年第10期摘要:工业机器人崛起于在20世纪60,是一种将其和计算机辅助设计〔CAD〕、计算机辅助制造〔CAM〕系统结合在一起的特殊装备。
而Unimation PUMA560作为简单6自由度机器人,在工业中的应用也极为广泛。
本文针对典型的工业机器人Unimation公司生产的PUMA560机器人,运用MATLAB中的机器人仿真工具箱〔Robotics Toolbox〕分析了其正逆运动学方法和轨迹规划的结果,并观察了其运动情况和规律。
关键词:Unimation PUMA560;机械臂;MATLAB仿真机器人运动学涉及大量的算法设计和计算量,所以利用计算机可视化和计算机的仿真软件的方式进行仿真,能过大大减轻科研人员的工作量。
通过图形观察机器人在一定控制条件下的运动规律进而帮助科研人员更好地理解其工作的原理,同时验证其算法的正确性,并对机器人进行图形仿真将结果以图形的形式表示出来,也十分便于展示给企业或者客户。
此外,MATLAB等的仿真软件能在机器人投入生产之前观察其工作效果,从而大大减轻了企业承担的经济风险。
一、搭建PUMA560机械臂本文应用MATLAB的Robotics Toolbox机器人仿真工具箱做机械臂的仿真。
第一步是利用Link函数搭建各个连杆之间关节的相互关系,第二步是调用robot函数创立一个新的机器人对象。
二、 PUMA560的运动分析〔一〕机器人运动学正问题机器人运动学正问题连杆的位移和相对应的关节的偏移量,求解末端连杆坐标系相对于基坐标系的位姿。
图1 PUMA560操作臂运动参数和坐标系分布本文使用MALTBA的Robot中的正问题计算函数fkine能够求解机器人运动学的正问题。
在分析这个问题时,分析可得在操作臂的中部有一个轮子将连续三个部件的运动相关联在一起。
需要根据连杆变换矩阵公式求得每一个连杆的变换矩阵01T~56T,然后将各个连杆矩阵连乘得到06T:〔二〕机器人运动学逆问题机器人运动学逆的解决方法在被告知连杆的位移和相对应坐标系的姿态,即其位姿矩阵,求反求机械臂各个关节的位姿。
puma560的运动学及matlab实现(正解+逆解)

puma560的运动学及matlab实现(正解+逆解)表1 PUMA560机器⼈的连杆参数关节i变化范围/(o) 190000-160~16020-900149.09-225~453-900431.80-45~22540-9020.32443.07-110~170509000-100~10060-9000-266~266正解源码DEG = pi/180;cta1=-70.4385cta2=182.6918cta3=-90.0000cta4=-82.4708cta5=-19.7387cta6=-97.9933T01=[cosd(cta1),-sind(cta1),0,0;sind(cta1), cosd(cta1),0,0;0,0,1,0;0,0,0,1];T02=T01*[cosd(cta2),-sind(cta2),0,0;0,0,1, 149.09;-sind(cta2),-cosd(cta2),0,0;0,0,0,1] ;T03=T02*[cosd(cta3),-sind(cta3),0,431.8;sind(cta3), cosd(cta3),0,0;0,0,1,0;0,0,0,1];T04=T03*[cosd(cta4),-sind(cta4),0,20.32;0,0,1,433.07;-sind(cta4),-cosd(cta4),0,0;0,0,0,1];T05=T04*[cosd(cta5),-sind(cta5),0,0;0,0,-1,0;sind(cta5), cosd(cta5), 0,0;0,0,0,1];T06=T05*[cosd(cta6),-sind(cta6),0,0;0,0,1,0;-sind(cta6),-cosd(cta6),0,0;0,0,0,1];O=T06*[0;0;0;1];=====================================================逆解源码fid = fopen('inverseout.txt','w');%逆解的保存⽂件%赋初值T06 =[0.0000 1.0000 0.0000 -149.0900;0.0000 -0.0000 1.0000 864.8700;1.0000 0 -0.0000 20.3200;0 0 0 1.0000] ;a0=0; a1=0; a2=431.8; a3=20.32; a4=0; a5=0;d1=0; d2=149.09; d3=0; d4=433.07; d5=0; d6=0;n_x=T06(1); n_y=T06(2); n_z=T06(3);o_x=T06(5); o_y=T06(6); o_z=T06(7);a_x=T06(9); a_y=T06(10); a_z=T06(11);p_x=T06(13); p_y=T06(14); p_z=T06(15);disp(['⼋组解分别是:']);for i=1:2for j=1:2for k=1:2%求解theta1(为弧度)sqr1=[sqrt(p_x^2+p_y^2-d2^2),-sqrt(p_x^2+p_y^2-d2^2)];ta1=atan2(p_y,p_x)-atan2(d2,sqr1(i));%求解theta3(弧度表⽰)k1=(p_x^2+p_y^2+p_z^2-a2^2-a3^2-d2^2-d4^2)/(2*a2);sqr3=[sqrt(a3^2+d4^2-k1^2),-sqrt(a3^2+d4^2-k1^2) ];ta3=atan2(a3,d4)-atan2(k1,sqr3(j));fs23=-((a3+a2*cos(ta3))*p_z)+(cos(ta1)*p_x+sin(ta1)*p_y)*(a2*sin(ta3)-d4); sc23=(-d4+a2*sin(ta3))*p_z+(cos(ta1)*p_x+sin(ta1)*p_y)*(a2*cos(ta3)+a3); ta23=atan2( fs23,sc23);%求解theta2 (弧度表⽰)ta2=ta23-ta3;%求解theta4 (弧度表⽰)fs4=[ -a_x*sin(ta1)+a_y*cos(ta1),a_x*sin(ta1)-a_y*cos(ta1)];sc4=[ -a_x*cos(ta1)*cos(ta23)-a_y*sin(ta1)*cos(ta23)+a_z*sin(ta23),a_x*cos(ta1)*cos(ta23)+a_y*sin(ta1)*cos(ta23)-a_z*sin(ta23)];fprintf(fid,'%d,',sc4(1,1));fprintf(fid,'\t');fprintf(fid,'%d,',sc4(2,1));fprintf(fid,'\t');fprintf(fid,'%d,',fs4(1,1));fprintf(fid,'\t');fprintf(fid,'%d,',fs4(1,2));fprintf(fid,'\t');fprintf(fid,'\n');ta4=atan2(fs4(k),sc4(k));%求解theta5 (弧度表⽰)fs5=-a_x*(cos(ta1)*cos(ta23)*cos(ta4)+sin(ta1)*sin(ta4))...-a_y*(sin(ta1)*cos(ta23)*cos(ta4)-cos(ta1)*sin(ta4))...+a_z*(sin(ta23)*cos(ta4));sc5=a_x*(-cos(ta1)*sin(ta23))+a_y*(-sin(ta1)*sin(ta23))+a_z*(-cos(ta23));ta5=atan2(fs5,sc5);%求解theta6 (弧度表⽰)fs6=-n_x*(cos(ta1)*cos(ta23)*sin(ta4)-sin(ta1)*cos(ta4))...-n_y*(sin(ta1)*cos(ta23)*sin(ta4)+cos(ta1)*cos(ta4))...+n_z*(sin(ta23)*sin(ta4));sc6= n_x*(cos(ta1)*cos(ta23)*cos(ta4)+sin(ta1)*sin(ta4))*cos(ta5)... -n_x*cos(ta1)*sin(ta23)*sin(ta5)...+n_y*(sin(ta1)*cos(ta23)*cos(ta4)+cos(ta1)*sin(ta4))*cos(ta5)...-n_y*sin(ta1)*sin(ta23)*sin(ta5)...-n_z*(sin(ta23)*cos(ta4)*cos(ta5)+cos(ta23)*sin(ta5));ta6=atan2(fs6,sc6);%save%将其化为⾓度Theta=[ta1 ta2 ta3 ta4 ta5 ta6]./pi*180endendend关于C++版本的运动学正解和逆解的代码,可以在以下链接下载。
PUMA560机器人运动学分析
PUMA560机器人运动学分析——基于matlab程序的运动学求解求解PUMA560正向运动学解。
求解PUMA560逆向运动学解。
求解PUMA560的雅克比矩阵。
利用GUI创建运动分析界面。
姓名:xxx学号:201100800406学院:机电与信息工程学院专业:机械设计制造及其自动化年级2011指导教师:xx前言说明此次大作业,是我自己一点一点做的。
程序代码写好之后,感觉只是将代码写上去太过单调,而又不想将课本上或PPT上的基础知识部分复制上去,但我又想让自己的大作业有一点与众不同,所以我决定弄一个GUI界面。
开始对GUI一窍不通,经过几天的学习,终于有了点成果,但还是问题不断,有很多想法却难以去实现,考试在即,只能做成这样了,希望见谅。
目录前言说明 ................................................................................. - 1 -求解PUMA560正向运动学解 ............................................... - 2 -求解PUMA560逆向运动学解 ............................................... - 5 -求解PUMA560的雅克比矩阵 ............................................. - 15 -利用GUI创建运动分析界面................................................ - 22 -求解PUMA560正向运动学解在已知PUMA560各关节连杆DH参数,以及给定相应的关节变量之后,可以通过正向运动学求解出机械手末端抓手在基系内的位姿。
从而利用输入不同的关节变量组合,实现对PUMA560机器人的准确控制。
以下是利用matlab编写的求解PUMA560正向运动学解的函数zhenjie.m:function T=zhenjie(c1,c2,c3,c4,c5,c6)%求puma560正解a2=431.8;a3=20.32;d2=149.09;d4=433.07;c1=c1/180*pi;c2=c2/180*pi;c3=c3/180*pi;c4=c4/180*pi;c5=c5/180*pi;c6=c6/180*pi;A1=[cos(c1),-sin(c1),0,0;sin(c1),cos(c1),0,0;0,0,1,0;0,0,0,1];A2=[cos(c2),-sin(c2),0,0;0,0,1,d2;-sin(c2),-cos(c2),0,0;0,0,0,1];A3=[cos(c3),-sin(c3),0,a2;sin(c3),cos(c3),0,0;0,0,1,0;0,0,0,1];A4=[cos(c4),-sin(c4),0,a3;0,0,1,d4;-sin(c4),-cos(c4),0,0;0,0,0,1];A5= [cos(c5),-sin(c5),0,0;0,0,-1,0;sin(c5),cos(c5),0,0;0,0,0,1];A6=[cos(c6),-sin(c6),0,0;0,0,1,0;-sin(c6),-cos(c6),0,0;0,0,0,1];T=A1*A2*A3*A4*A5*A6end其中c1,c2,c3,c4,c5,c6,为分别输入的各关节变量,即连杆1、连杆2、连杆3、连杆4、连杆5、连杆6的关节转角,直接利用关节矩阵相乘得到机械手末端抓手在基系内的位姿。
PUMA560机器人求解
PUMA560机器人求解图PUMA560机器人的六杆操作机及各连杆的坐标系。
PUMA560机器人的六杆及赋给各杆的坐标系。
PUMA560机器人有六个转动关节且两个转动关节的轴线相较于一点,共六个自由度:杆1绕固定坐标系的Z轴旋转l;杆2绕杆1坐标系的Z轴旋转02;杆01 1 23绕杆2坐标系的Z轴旋转03;杆4绕杆3坐标系的Z轴旋转九;杆23345绕杆4坐标系的Z4轴旋转05;杆6绕杆5坐标系的Z5轴旋转°6。
机器人手爪夹持工件时,需确定它于被夹持工件上固连坐标系的相对位置关系和相对姿态关系。
PUMA560机器人各连杆的参数3 -90° -90° 180 04 0° 90° 0 4005 0°90°0 60°根据上表所示的机器人各连杆的参数和齐次变换矩阵公式,可求得T i -1:ic 0-s 0aiii -1T i -1= c a s 0 c a c 0 -s a—ds ai -1i i -1i i -1ii -1is a s 0 s a c 0 c a dc a i -1i i -1ii -1 ii -1L 00 1*:求的所有变换矩阵:00由运动学正解矩阵为:100010 00 01 1080-100000 00 10 01 00001150 -100 001 00180 01400 -100 001 10001000100 -1001356及细化显式公式:nx=c[c(ccc-ss)-ssc]+s(scc+cs) 1245646256145646ny=s[c(ccc-ss)-ssc]-c(scc+cs) 1245646256145646 nz=-s(ccc-ss)-csc245646256 ox=c[c(-ccc-ss)+ssc]+s(cc-scs) 1245646256146456oy=s[c(-ccs-sc)+sss]-c(cc-scs) 1245646256146456 oz=-s(-ccc-ss)+csc 245646256 ax=-c(ccs+sc)-ssc 124525145 ay=-s(ccs+sc)+css 124525145 az=scs-cc24525 px=c[ac+ac-ds]-ds122224221py=s[ac+ac-ds]+dc 122224221pz=-as-as-dc322242 设机器人起始位置为零位如图所示,及图表中各杆的参数得到:一0014800-10150=61001800001该4X 4矩阵即为PUMA560机器人在题目给定情况下的手部的位姿矩阵,即运动学正解。
工业机器人运动系统分析
机器人运动系统分析1、工业机器人的正运动学本文以PUMA560机器人[36]为对象。
PUMA560机器人是一种六自由度的臂式机器人,运动姿态由六个关节控制,其结构组成部分为腰部、肩部、大臂、小臂、腕关节。
它的前三个关节运动范围较大,关节连杆较长,所以主要用于确定机机器人末端的位置,后三个关节比较灵活主要用于确定末端的方向。
PUMA560机器人的机械结构如下图1.4所示,分别建立各关节坐标系如图1.5所示,可以看出,机器人的末端三关节的轴线交于一点,交点为三关节坐标系重合的原点。
图1.4 PUMA560结构图图1.5 PUMA560坐标图表1.1为PUMA560机器人的D -H 参数表[37]。
表1.1 PUMA560机器人D -H 参数表表1.1中ιq 列括号里的值为图1.4中机器人关节变量的实际值。
根据齐次坐标变换和表1.1中机器人的参数,得到各连杆的齐次变换矩阵为:112233211233012123224445543445644550000000001000010000010000100010001000001001000000001001;;;;;c s c s c s a s c d s c -s -c c s a c s d -s -c s c ---⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦--⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦T T T T T 66566000010000001c s -s -c -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦T (1.10)其中,ji T 为坐标系{i}相对于坐标系{j}的齐次变换矩阵;sin i i s q =,cos i i c q =。
将以上各齐次变换矩阵依次相乘即可得到机器人末端相对于操作空间的齐次变化矩阵:0123456123456T =T T T T T T(1.11)式(1.11)为关节变量1q ,2q ,……,6q 的函数。
PUMA560型机器人
PUMA560型机器⼈⼀、PUMA560简介PUMA-560机器⼿是⼯业机器⼈, 或称机器⼈操作臂。
从外形来看, 它和⼈的⼿臂相似, 是由⼀系列刚性连杆通过⼀系列柔性关节交替连接⽽成的开式链。
这些连杆就像⼈的⾻架, 分别类似于胸、上臂和下臂, PUMA-560机械⼿的关节相当于⼈的肩关节、肘关节和腕关节。
操作臂的前端装有末端执⾏器或相应的⼯具, 也常称为⼿或⼿⽖。
⼿臂的动作幅度⼀般较⼤,通常实现宏操作。
PUMA⼀560 型机器⼈由机器⼈本体(⼿臂)和计算机控制系统两⼤部分组成。
机器⼈本体(⼿臂): 6 个⾃由度; 驱动采⽤直流伺服电机并配有安全刹闸;⼿腕最⼤载荷为2 kg (包括⼿腕法兰盘); 最⼤抓紧⼒为60 N ; 重复精度为⼠o.lm m; ⼯具在最⼤载荷下的速度: ⾃由运动时为1.0m/s,直线运动时为0.5m/s,⼯具在最⼤载荷下的加速度为1 9 ; 操作范围是以肩部中⼼为球⼼o.92 m 为半径的空间半球; 夹紧系统由压缩空⽓环节与四位电磁阀组成; ⼯具安装表⾯为腕部法兰盘⾯, 安装尺⼨为。
41.3mm上均布4 -M S的安装孔; 整个⼿臂重53kg。
PUMA-560机械⼿的运动学⽅程PUMA-560机械⼿属于关节式的机器⼈, 6个关节都是转动关节。
前⾯3个关节确定⼿腕参考点的位置,后⾯3个关节确定⼿腕的⽅位。
和多数⼯业机器⼈⼀样, 后3个关节轴线交于⼀点。
关节1 的轴线为铅直⽅向, 关节2和关节3的轴线⽔平且平⾏距离为a2, 关节1和关节2的轴线垂直相交,关节3和关节4的轴线垂直交错, 距离为a3。
关节1和2的x轴⽅向的距离为d2, 关节3和4的x 轴⽅向的距离为d4。
PUMA-560机械⼿实体图见图1, 各个连杆坐标系的连杆参数列于表1中。
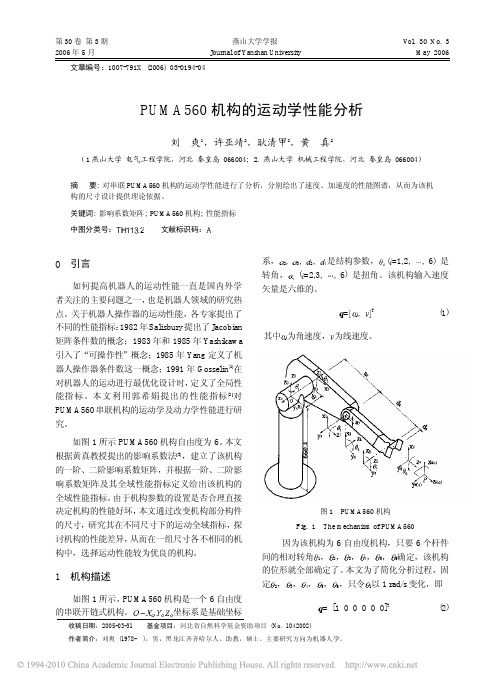
UMA-560机械⼿实体图⼆、PUMA560机构描述如图1 所⽰,PUMA560 机构是⼀个6 ⾃由度的串联开链式机构。
O-xyz坐标系是基础坐标系,a2, a3, d2,d4是结构参数, (i =1,2,… ,6) 是转⾓,α( i=2,3, …, 6) 是扭⾓。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(式2)
2.3 Matlab求解机器人末端位姿
将PUMA560机器人的参数带入上述矩阵中, 然后在matlab中计算求解,得到末端位姿。
编程:
2.4 PUMA560机器人逆运动学
即为针对下式给定的末端位姿,求解机 器人各个关节角θ1~θ6。
nx ox ax px T= ny oy ay py =A1 A2 A3 A4 A5 A6
(5)求θ5 通过逆变换得
(6)求θ6 通过逆变换得
θ5=arctan (sinθ5 /cosθ5 )
θ6=arctan (sinθ6 /cosθ6)
0
0
90
di(m) 变量范围
0
-160~160
-90
0
0
0.1491 -225~45
0
0.4318 -90
0
-45~225
-90
-0.0203 0
0.4331 -110~170
90
0
0
0
-100~100
-90
0
0
0
-266~266
2. PUMA560机器人的运动学分析 2.1 连杆变换矩阵(D-H矩阵)
的元素对应相等,得到 对上式取平方和,有
利用三角代换 带入式5中,得θ1的解为
同样的,用三角代换求出θ3
(3)求θ2 式3左右乘以A1A2 A3的逆矩阵,得
A3-1 A2-1 A1-1 T=A4 A5 A6 经过一系列变换得
(4)求θ4 根据矩阵对应,得到等式
θ5≠180°时,便有
θ5=0°时,这时z4 与z6轴重合, θ4 与 θ6 的转动效果相同, 会有无穷组解
(1)沿Xi-1 轴平移ai-1 , 将Oi-1 移动到O’i-1 ; (2)以Xi-1为转轴, 旋转αi-1 角度, 使新的Zi-1轴与Zi轴 同向; (3)沿Zi 平移di, 使O’i-1 移动到Oi ; (4)以Zi 轴为转轴, 旋转θi 角度, 使新的Xi-1轴与Xi 轴 同向。 Ai =Trans(ai-1,0,0) Rot(Xi-1, αi-1) Trans(0,0, di ) Rot(Zi , θi) =
t21 t22 t23 -sinθ1p+cosθ1p = m21 m22 m23
d2
t31 t32 t33
p
m31 m32 m33 -a2s2-a3s23–d4c23
000
1
0 00
1
将等式两边的矩阵中第4列第2行元素对应,得
-sinθ1 px +cosθ2 py =d2
(式5)
(2)求θ3 在选定θ1后,令等式两边矩阵第4列第1行和第4列第3行
2.2 机器人正向运动学
第i 坐标系相对于第i -1 坐标系的位姿Ai , 则第i 坐标系相对于基坐标系的位姿的齐次变换矩阵 0Ti , 表示为:
0Ti =A1 A2 …Ai
(式1)
当i =6 时, 0T6 确定了机器人末端连杆坐标系
相对于基坐标系的位姿。
0T6 =A1 A2 …A6 , 其中:
nz oz az pz 000 1
(式3)
位姿运动学方程 c1表示cosθ1 ;c23 表示cos(θ2+θ3)其他类推
(1)求θ1 对式3两边左乘A1-1,得 A1-1T=A2 A3 A4 A5 A6 将等式两端分别展开得
(式4)
t11 t12 t13 cosθ1p+sinθ1p
m11 m12 m动学分析
1.PUMA560机器人的参数设计 2.PUMA560机器人运动学分析
1. PUMA560机器人的参数设计 1.1 坐标系的建立
PUMA560 机器人及其坐标系的建立 示意图
1.2 PUMA560机器人连杆参数
连杆i 1 2 3 4 5 6
αi-1(°) ai-1(m) θi(°)