焊接机器人运动学分析
工业机器人运动学基础篇:运动学构型

工业机器人运动学基础篇:运动学构型本文重点介绍工业机器人常用运动学构形,以下是工业机器人的几种常用结构形式(图),图文描述非常详细,希望能对大家带来帮助!!1、笛卡尔机械臂优点:很容易通过计算机控制实现,容易达到高精度。
缺陷:妨碍工作,且占地面积大,运动速度低,密封性欠缺。
①焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。
②适用于多种类,批量的柔性化作业,提高产品质量,提高劳动生产效率,改进劳动条件和产品的快速更新换代有着显著作用。
2、铰链型机械臂(关节型)关节机器人的关节全都是旋转的,相似于人的手臂,工业机器人中最常见的结构。
它的工作范围较为复杂。
①汽车零配件、模具、钣金件、塑料产品、玻璃制品、陶瓷、航空等的快速检测及产品开发。
②车身装配拆卸、通用机械装配拆卸等制造质量控制等的三坐标测量及误差检测。
③古董、艺术品、雕塑、卡通人物造型、人像成品等的制作。
④汽车整车现场测量和检测等。
3、SCARA机械臂SCARA机器人常用于装配拆卸等作业,最显著的特点是它们在x-y平面上的活动具有较大的柔性,而沿z轴具有很强的刚性,因而,它具有选择性的柔性。
这种机器人在装配作业中取得了较好的使用。
①大量用于装配印刷电路板和电子零部件②搬动和取放物件,如集成电路板等③普通使用于塑料行业、汽车行业、电子产品行业、药品行业和食品工业等领域.④搬取零件和装配工作。
4、球面坐标型机械臂特点:围绕着中心支架附近的工作范围大,两个转动驱动装置容易密封,延伸工作空间较大。
但该坐标复杂,难于控制,且直线驱动装置存在密封的缺陷。
5、圆柱面坐标型机械臂优点:且计算简单;直线部分可使用液压驱动,可输出较大的动力;能够伸入型腔式机器内部。
缺陷:它的手臂能够延伸的空间遭到限制,不能到达近立柱或近地面的空间;直线驱动部分难以密封、防尘;后臂工作时,手臂后端会碰到运动范围内别的物体。
HR-59机器人运动学分析及其在管件焊接中的应用
的 机 构 及 传 动 方 案 进 行 了详 细 的 分 析 , 据 经 典 的 D —H 方 法 推 导 出 机 器 人 的 运 动 学 逆 解 , 讨 论 了 根 并
HR 一5 9机 器人 在 管 件 焊 接 中 的 应 用 。 这 对 机 器 人 应 用 技 术 有 Βιβλιοθήκη 重 要 的 参 考 价 值 。
维普资讯
・
设 计 与研 究 ・
文 章 编 号 :0 1 2 6 (0 6 0 10 — 25 20 )8—04 0 0 0— 4
组合机床与自动化加工技术
H 5 R一 9机器人运动学分析及其在管件焊接中的应用
王 宗 霞
( 威海 职业 技术 学院 ,山东 威海 2 4 0 ) 6 2 0
h s s l t e s a i l o l c , d s i b e f rr p t i e ts s s c sh d ig wed g a d a s mb y. h s a ee i p ca mp i e a u t l o e ei v a k u h a a l , li e l T i cv c n a n a t n n n n s
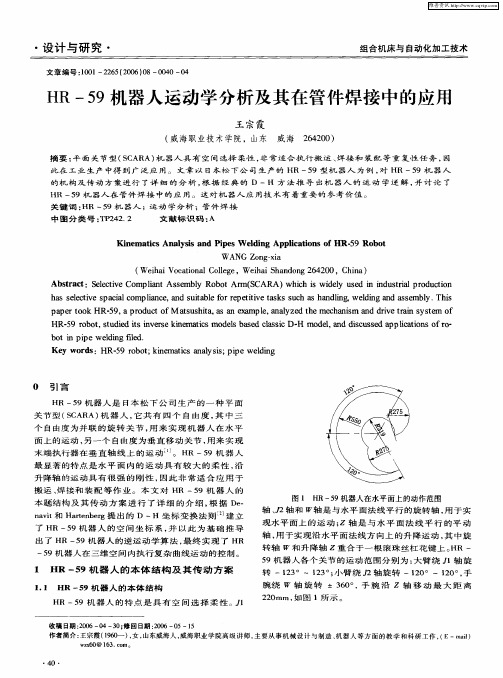
关 节 型 ( C A) 器 人 , 共 有 四 个 自 由 度 , 中 三 S AR 机 它 其 个 自由 度 为 并 联 的 旋 转 关 节 , 来 实 现 机 器 人 在 水 平 用 面 上的运 动 , 一个 自由度 为垂 直移 动 关节 , 来 实现 另 用 末 端 执 行 器 在 垂 直 轴 线 上 的 运 动 川 。 HR 一5 9机 器 人
工业机器人的运动学

工业机器人运动学的展望
未来工业机器人运动学将与人工智能、机器视觉等技 术进一步融合,实现更智能化的运动控制和决策。
输入 标题
应用拓展
随着技术的进步,工业机器人运动学的应用领域将进 一步拓展,如微纳操作、深海/空间探索等高精度、高 可靠性要求的领域。
技术融合
理论深化
随着工业机器人运动学的不断发展,对相关领域的人 才需求将进一步增加,未来将需要更多的专业人才进
运动学逆问题
定义
给定机器人末端执行器的 位置和姿态,求解实现该 位置和姿态所需的关节角 度。
计算方法
通过逆向运动学模型,将 末端执行器的笛卡尔坐标 代入机器人结构参数方程, 反解出关节角度。
应用
根据目标位置和姿态,规 划机器人的关节运动轨迹, 实现精确控制。
雅可比矩阵
定义
描述机器人末端执行器速度与关节速 度之间关系的线性映射矩阵。
03 工业机器人运动学原理
运动学正问题
01
02
03
定义
给定机器人的关节角度, 求解机器人末端执行器的 位置和姿态。
计算方法
通过正向运动学模型,将 关节角度代入机器人结构 参数方程,求解末端执行 器的笛卡尔坐标。
应用
根据已知的关节角度,预 测或验证机器人的末端位 置和姿态,为机器人控制 提供基础。
基于运动学的轨迹规划
轨迹规划
基于运动学的轨迹规划是工业机器人运动学优化与控制的 重要环节,它涉及到机器人在空间中运动的路径和速度的 规划。
路径规划
路径规划是轨迹规划的基础,它通过寻找起点和终点之间 的最优路径,确保机器人在移动过程中能够安全、高效地 完成任务。
速度规划
速度规划是在路径规划的基础上,对机器人在各个运动阶 段的速度进行优化,以达到最佳的运动效果和效率。
机器人焊接中级知识点总结
机器人焊接中级知识点总结一、焊接机器人的基本结构1. 机器人基本构成焊接机器人主要由机械臂、焊枪、控制系统和感应器等组成。
机械臂多采用多轴关节机械构造,能够实现多方向的灵活运动;焊枪通常是自动焊接设备的核心部件,包括手臂、传感器、电源源、焊丝供应器等;控制系统一般是使用PLC控制或者是程序控制系统,负责控制机械臂和焊枪的运动,管理焊接参数;感应器用于检测焊接工件,保证焊接质量。
2. 机器人动作控制焊接机器人的动作控制是通过控制器对程序正负系统,传感器,气动,液压系统和电路进行控制,实现精密的焊接动作。
3. 机器人控制系统焊接机器人的控制系统根据不同的采用PLC控制或者是程序控制系统,主要包括主控制器、教程器、接口板、数字输入输出卡、模拟输入输出卡、开关电源、交流电源,以及焊枪、外围输入输出设备等。
二、焊接机器人的应用1. 汽车制造业汽车制造业是焊接机器人应用的主要领域之一,包括汽车车身焊接、车门、车窗焊接等环节。
2. 电子设备制造业焊接机器人在电子设备制造业中包括PCB焊接、各种电子元器件与线路板焊接、传感器等的组装焊接等多方面的应用。
3. 钢结构建筑焊接机器人在钢结构建筑领域主要用于钢桥梁、钢管道、大型钢结构等的焊接。
4. 家具、厨具、酒店设备制造等行业焊接机器人在这些领域主要用于产品的焊接、组装等工艺。
5. 其它焊接机器人还能用于船舶、航空、军工等领域,满足不同行业的自动化焊接需求。
三、焊接机器人的技术特点1. 灵活性焊接机器人能实现多轴自由运动,并能根据工件形状和焊接需要进行调整,灵活适配不同的焊接需求。
2. 精准性焊接机器人通过精确控制系统,能够实现高精度的焊接,保证焊缝的质量。
3. 高效性焊接机器人能够连续工作,往往比人工焊接更为高效,提高了生产效率。
4. 可靠性焊接机器人作业稳定、可靠,能够实现长时间的连续作业,减少了不必要的维护和停机时间。
5. 自动化程度高焊接机器人能够自动化运行,实现自动化生产线的要求。
高速焊接机器人导轨系统的动力学建模与仿真分析
高速焊接机器人导轨系统的动力学建模与仿真分析导言高速焊接机器人在现代工业中扮演着重要的角色。
为了实现高质量的焊接效果,机器人的导轨系统需要具备良好的动力学性能。
本文旨在对高速焊接机器人导轨系统的动力学特性进行建模与仿真分析,以揭示其运动规律和优化潜力。
1. 动力学建模在进行动力学建模前,我们需要确定所使用的坐标系以及机器人的运动自由度。
一般来说,高速焊接机器人导轨系统使用笛卡尔坐标系,并具有6个自由度,即三个平移自由度和三个旋转自由度。
1.1 运动学模型根据机器人的结构和运动衔接,我们可以推导出机器人的运动学方程。
通过测量机器人末端执行器的姿态和位移,可以得到机器人的位姿和关节角度。
1.2 动力学模型基于运动学模型的基础上,我们可以推导出机器人的动力学方程。
动力学模型描述了机器人在外部力或扭矩作用下的运动特性。
对于高速焊接机器人来说,由于其导轨系统是其动力学特性影响最为明显的部分,我们将重点分析导轨系统的动力学行为。
2. 仿真分析为了验证动力学模型的准确性并深入了解高速焊接机器人导轨系统的运动规律,我们进行了仿真分析。
2.1 建立仿真模型基于前文中推导得到的动力学模型,我们使用仿真软件建立了高速焊接机器人导轨系统的仿真模型。
在仿真模型中,我们考虑了导轨系统的质量、摩擦力、惯性等因素,并模拟了焊接过程中的外部力。
2.2 分析仿真结果通过对仿真模型的运行,我们可以获取导轨系统的关键动力学参数,如加速度、速度和位移等。
同时,我们还可以观察到导轨系统在高速焊接过程中的振动情况以及其他可能的不稳定因素。
3. 结果讨论基于仿真结果,我们可以对高速焊接机器人导轨系统的动力学特性进行深入讨论。
3.1 运动规律分析通过分析导轨系统的位移曲线和速度变化曲线,我们可以了解到机器人在运动过程中的加速度变化情况。
同时,我们还可以通过分析姿态变化曲线来研究机器人的稳定性和运动轨迹。
3.2 振动控制优化通过观察仿真结果中的振动情况,我们可以针对性地对导轨系统进行优化。
法兰克焊接机器人协调参数设置
法兰克焊接机器人协调参数设置简介法兰克焊接机器人是一种自动化设备,用于在工业生产中进行焊接操作。
为了确保焊接质量和效率,需要对机器人进行协调参数设置。
本文将详细介绍法兰克焊接机器人的协调参数设置的相关内容,包括机器人的运动学模型、关节角度设定、工具坐标系、速度和加速度等。
机器人的运动学模型机器人的运动学模型是描述机器人运动的数学模型。
对于法兰克焊接机器人来说,通常采用七自由度的模型,即包括七个关节。
机器人的末端执行器可以在三维空间中进行平移和旋转,通过设置机器人的关节角度来控制末端执行器的位置和姿态。
关节角度设定关节角度是控制机器人运动的重要参数,通过设定关节角度可以控制机器人的位置和姿态。
在进行焊接操作时,需要根据焊接工件的要求设定关节角度,使机器人能够准确地焊接工件的各个部位。
关节角度设定的方法一般有两种:绝对角度设定和相对角度设定。
绝对角度设定是指直接设定机器人各个关节的角度值,相对角度设定是指设定机器人各个关节的角度变化量。
工具坐标系工具坐标系是描述机器人末端执行器位置和姿态的坐标系。
在焊接操作中,需要设定一个合适的工具坐标系,使机器人能够准确地焊接工件的各个位置。
工具坐标系的设定需要考虑机器人末端执行器的几何形状和焊接工件的几何形状。
通常情况下,可以选择机器人末端执行器的中心点作为工具坐标系的原点,末端执行器的朝向作为工具坐标系的Z轴方向。
速度和加速度速度和加速度是影响机器人运动的重要参数。
在焊接操作中,需要根据工件的要求设定合适的速度和加速度,以确保焊接质量和效率。
速度和加速度的设定需要考虑机器人的动态特性和焊接工件的特性。
一般情况下,可以根据焊接工艺要求设定合适的速度和加速度,使机器人能够平稳地进行焊接操作。
误差补偿误差补偿是在机器人运动过程中对误差进行修正的过程。
在焊接操作中,由于各种因素的影响,机器人的运动可能会产生一定的误差。
为了确保焊接质量,需要对这些误差进行补偿。
误差补偿的方法一般有两种:开环补偿和闭环补偿。
机械毕业设计927集装箱波纹板焊接机器人机构运动学分析及车体结构正文
第I 页共I 页目录1 绪论 (1)1.1选题的依据及意义 (1)1.2 研究现状及发展趋势 (1)1.3本课题的研究设计内容及方法 (3)1.4课题的完成情况 (5)2 焊接机器人机构运动学分析 (6)2.1运动学分析数学基础-齐次变换(D-H变换) (6)2.2 变换方程的建立 (7)2.3运动学分析处理方法 (9)2.4逆解过程 (10)2.5本章小结 (28)3结构设计 (30)3.1小车行走结构设计 (30)3.2 摆动关节电机选择 (36)3.3本章小结 (36)结束语 (38)致谢 (39)参考文献 (40)附录 (41)1 绪论1.1 选题的依据及意义这里介绍该课题的选题背景,以及完成该课题的意义。
1.1.1 选题的依据针对集装箱波纹板焊接自动化水平低的现状:目前用于焊接集装箱侧板与顶侧梁、底侧梁的自动焊专机,由于在焊接过程中,焊枪不能随波形的变化调整与焊枪速度的夹角(焊接工艺参数也未有变化),如图1.1所示,在直线段与在波内斜边段,焊接速度方向恒为水平向右,而焊枪与焊缝保持垂直,故焊枪与焊接速度的夹角不能保持恒定,直接导致在直线段的焊缝成形与在波内斜边段的焊缝成形不能保持一致,进而导致在直线段焊接与在波内斜边段焊接的焊缝的质量不一样,进而制约集装箱的生产质量[1]。
图1.1 集装箱波纹板示意图1.1.2 选题的意义通过完成该课题,即设计出集装箱波纹板三自由度焊接机器人及对其进行运动学分析,能够解决在焊接过程中焊枪不能随波形的变化调整与焊枪速度的夹角这个问题,使得在直线段与在波内斜边段焊接时,焊枪与焊缝都保持垂直,相对于焊缝的焊接速度都恒为同一速度,进而能够提高在直线段与在波内斜边段的焊缝成形的一致性,提高集装箱的生产质量。
1.2 研究现状及发展趋势这里的研究现状及发展趋势包括三个方面:前面也提到这里的集装箱波纹板三自由度焊接机器人(为移动焊接机器人)是为提高焊接自动化水平的,故这里为移动焊接机器人的研究现状及发展趋势;关于结构设计方面的研究现状及发展趋势;关于运动学分析的常用方法[5]。
四自由度机器人设计及运动学动力学分析

目录摘要............................................................................................................错误!未定义书签。
Abstract ........................................................................................................错误!未定义书签。
1绪论 (4)1.1 引言 (4)1.2机器人研究现状及发展趋势 (5)1.3本课题的主要研究内容和工作安排 (10)1.3.1课题研究的背景及意义 (10)1.3.2课题研究的内容及安排 (12)2四自由度串联机器人本体结构设计 (13)2.1机器人的总体方案设计 (13)2.1.1抓取机器人功能需求分析及其特点 (13)2.1.2机器人驱动方案的确定 (14)2.1.3机械传动方案的确定 (15)2.1.3机器人基本技术参数设计 (15)2.1.4机器人本体的总体结构 (17)2.2机器人本体基本结构设计 (18)2.2.1大臂和小臂机械结构设计 (18)2.2.2腕部机械结构设计 (20)2.2.3直线组件的设计选择 (20)2.2.4支架结构设计 (21)2.2.5步进电机与减速器的计算和选择 (22)2.2.6机器人传动轴的校核 (25)2.2.7机器人本体的三维模型 (26)2.3本章小结 (27)3四自由度抓取机器人运动学分析及仿真 (28)3.1机器人运动学分析 (28)3.1.1奇次坐标变换 (29)3.1.2 Denavt-Hartenberg(D-H)表示法 (30)3.1.3抓取机器人运动学模型的建立 (32)3.2机器人运动学方程的建立 (33)3.2.1抓取机器人的正运动学分析 (33)3.2.2工业机器人工作空间分析 (35)3.2.3机器人雅可比(Jacobian)关系求解 (38)3.2.4 抓取机器人的逆运动学分析 (41)3.3四自由度串联机器人运动学仿真 (45)3.3.1虚拟样机技术概述 (45)3.3.2本文用到的ADAMS软件模块 (46)3.3.3建立机器人仿真模型 (47)3.3.4机器人位移仿真分析 (49)3.3.5机器人速度仿真分析 (50)3.4 本章小结 (51)4. 轨迹规划及仿真分析............................................................................. 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 ቤተ መጻሕፍቲ ባይዱ引言
Mo t o m a n机 器 人 公 司 生 产 的 H P 一 6机 器 人 是 一 种
使直线形焊 缝表 面与 机器 人 的腰 关节 ( 即 s轴 ) 和大臂关节 三轴线 ( 即 轴 ) 处于 同一 水平 高度 , 且机
器人初始位姿时 的铅垂对称面与直线形焊缝 中心线处
6自由度旋转 关节 通用 机器 人 . 其 作 为技术 成熟 的第 二代通用型工业机器 人 , 在 国 内外 汽车制 造和 机械加
r o b o t we l d i n g s y s t e m i s c o nd u c t e d.Th r o u g h e s t a bl i s h i ng t h e c o o r d i n a t e s y s t e m o f he t r o b o t we l d i n g s y s t e m ,t he k i n e ma t i c s e q u a t i o n o f t he ma i n b o d y o f r o b o t a nd v e c t o r h o mo g e n e o u s t r a n s f o r ma t i o n o f t h e we l d i n g wi r e e n d t o o l a : r e d e r i v e d ir f s t y. T h e n。 t he c l o s e d l o o p k i n e ma t i c s o f t h e we l d i n g s y s t e m i s a n ly a z e d t o s o l v e i n v e r s e k i n e ma t i c s o f r o b o t ma i n bo d y,t h us t h e s pa c e p o s e o f r o b o t e n d i s o b t a i n e d .Th r o ug h e x p e r i me n t l a a n a l y s i s ,t h e o v e r a l l e q u a t i o n o f mo t i o n o f t h e r o b o t we l d i n g s y s t e m i s g i v e n i f n a l l y, i t p r o v i d e s ma t h e ma t i c a l mo de l f o r s u bs e q u e n t we l d s e a m t r a c k i n g p l a n;a n d r e l i a b l e k i ne ma t i c s b a s i s f o r d e e p e r d e v e l o p i n g i n t e l l i g e n t r e s e a r c h o n r o b o t we l d s y s t e ms . Ke y wo r d s: W e l di n g r o b o t Ro b o t p o s e Ki ne ma t i c s a n ly a s i s Co o r d i n a t e s y s t e m Ho mo g e n e o u s t r a n s f o r ma t i o n
出机 器人本 体运 动 学逆解 , 从 而得到 机器 人末端 空 间位姿 。最 后 , 通 过试验 分析 , 给 出 了机 器人 焊 接 系统整 体 运动 方程 。该 方程 为后
续的 焊缝轨 迹规 划提 供 可依 据 的数 学模 型 , 也为 开展 更深 层次 的机 器人焊 接系 统智 能化研 究提 供 了可靠 的运动 学依据 。 关键 词 :焊 接机 器人
摘
要 :为 了研 究焊缝 轨迹 跟踪 的方 法 , 以实验 室专 用 H P . 6焊接机 器人 系统 为对象 , 对 该机器 人焊 接系 统进行 了运 动学 分析 。通 过
建立 机器人 焊接 系 统坐标 系 , 导 出机 器人本 体运 动 学方程 和焊 丝端 头工具 矢量 齐次 变换矩 阵。接 着 , 分 析 了焊 接 系统 闭环 运 动学 , 求
焊接机器人运动学分析
聂晓波 。 等
焊 接 机 器 人 运 动 学 分 析
K i n e ma t i c s An a l y s i s o f t h e W el di n g Ro b o t
聂 晓 波 陈 丕 碑
( 内蒙古 工业大 学矿 业学 院, 内蒙 古 呼和 浩特 0 1 0 0 5 1 )
中 图分类 号 :1 4 2
机器 人 位姿
运动 学分 析
坐标 系
齐 次变 换
文献标 志码 :A
Ab s t r a c t :I n o r d e r t o s t u d y t h e we l d s e a m t r a c k i n g me t h o d , wi t h d e d i c a t e d H P 一 6 w e l d s e a m r o b o t s y s t e m a s o b j e c t , k i n e ma t i c s a n a l y s i s f o r t h i s