第十一章作业-轮系
第十一章轮系
w3
w3 wH
z2 z3 = z z 1 2′
9999 101× 99 = = 10000 100× 100 i1H = 1
H i13
1 = 10000
例1:在图示轮系中,已知各轮齿数: z1 =100, 2 z2 =101,z2′=100,z3 =99, 求i1H。 解: i1H 1 = 10000
4
轮系中各对啮合齿轮的传动比为: z2 w1 z3 z4 w2 w3' i12 = =i23 = i3'4 = = z =- z z1 w2 w3 w4 2 3' z5 w4' i4‘5 = =z4' 且: w3 = w3 ' , w4 = w4 ' w5
5
w5
z2 z3 z4 z5 w2 w3' w4' w1 , , , i12 = w2 = - z1 i23 = w3 = z2 i3'4 = w4 = - z3' i4‘5 = w5 = - z4'
z3 =- z 1
(1)
转化轮系中传动比
2 H 0 1 3 转化轮系 0
3
wH2
2
H
wH3
0
2
3
w2
2 H
w3
H
wH
0 1 3 原周转轮系 1
1
wH1
w1
行星轮系
H z2 z3 w1 wH w 1 H − i13 = = = H w3 w3 wH z1 z2
z3 =- z 1
(1)
对于行星轮系,假设太阳轮3固定(w3=0),于是有: z3 H w w w 1 H 1 H= = (- z ) i13 = H w3 w3 wH 1 i1H 1 z3 H = (- z ) = i13 1
第十一章 轮系
第十一章 轮系一、学习指导与提示工程中实际应用的齿轮机构经常以齿轮系(简称轮系)的形式出现,它用来获得大传动比、变速和换向、合成或分解运动以及距离较远的传动。
轮系可分为定轴轮系和周转轮系两大类,所谓复合轮系只不过是既包含定轴轮系又包含周转轮系,或几部分周转轮系组成的复杂轮系。
因此,首要的是弄清定轴轮系和周转轮系的本质属性,并掌握它们各自的传动比计算方法,在此基础上,只要注意正确区分轮系,就可以将一个复杂的复合轮系分解为若干个单一周转轮系和定轴轮系,这是学习轮系传动比计算的一个总体原则,应当牢牢把握。
本章的主要内容是:(1)轮系的应用和分类;(2)定轴轮系及其传动比;(3)周转轮系及其传动比;(4)复合轮系及其传动比;(5)特殊行星传动简介。
1.定轴轮系一个轮系,若运动过程中,所有齿轮的几何轴线的位置都是固定不变的,则可判定该轮系为定轴轮系(亦称普通轮系)。
注意:这里指的是几何轴线位置固定,并不是该轴不能转动,无论该轴是转动的,或不转动的(与机架相联),只要几何轴线位置不变,就是定轴的。
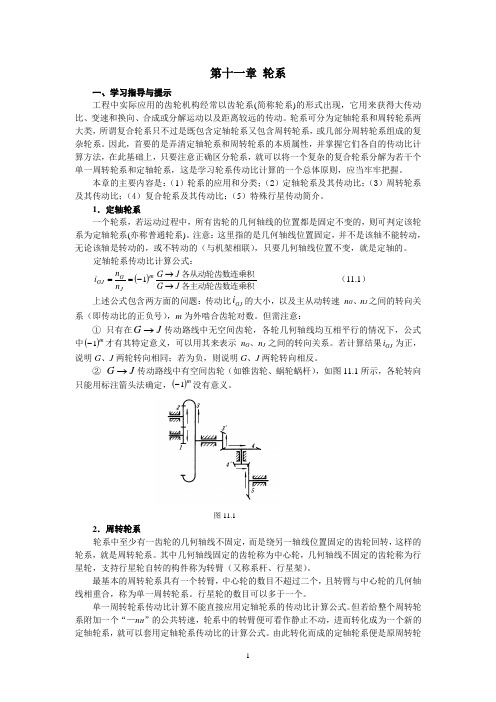
定轴轮系传动比计算公式:()各主动轮齿数连乘积各从动轮齿数连乘积J G J G n n i mJ G GJ →→-==1 (11.1) 上述公式包含两方面的问题:传动比GJ i 的大小,以及主从动转速 n G 、n J 之间的转向关系(即传动比的正负号),m 为外啮合齿轮对数。
但需注意:① 只有在J G →传动路线中无空间齿轮,各轮几何轴线均互相平行的情况下,公式中()m 1-才有其特定意义,可以用其来表示n G 、n J 之间的转向关系。
若计算结果GJ i 为正,说明G 、J 两轮转向相同;若为负,则说明G 、J 两轮转向相反。
② J G →传动路线中有空间齿轮(如锥齿轮、蜗轮蜗杆),如图11.1所示,各轮转向只能用标注箭头法确定,()m 1-没有意义。
图11.12.周转轮系轮系中至少有一齿轮的几何轴线不固定,而是绕另一轴线位置固定的齿轮回转,这样的轮系,就是周转轮系。
第11章-轮系习题答案

一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
tu11-轮系-2
h O4
2 1 4
再对H杆固定后由1,2,3,h构成的 轮系加一(- nh),则h杆固定而构 成定轴轮系,但各轮转速为: nH1-nHh, nH2-nHh, nH3-nHh. 其中, nH1 = nM , nH2 = n2 - nH , nHh = n4 - nH, nH3 =0。
5
OH
H
iH45= nH4 / nH5 =( n4 - nH )/ (-nH )=- Z5 / Z4 。 nM = nH1 3 O2
右 轮
直道上运行时, 直道上运行时,
n1 = n3 = nH
系杆H与齿轮1 系杆H与齿轮1、3 间无相对运动
nH =(n1 + n3)/2
转弯时,后轮与地面不发生滑 转弯时, 动,有:
=(r+L)/(rn3 / n1 =(r+L)/(r-L)
左轮 r P 4 2 右轮 5 r n1 P 1 n 2L 后轮 n3 3 1 3 H 2 前轮
e 5 4 3 2
d带 轮7来自a bc 61
d
e
5
4 3 2
7
a bc 6
1
d
e
5
4 3 2
7
a bc 6
1
6与d轮啮合时
d
e
5
4 3 2
7
a bc 6
1
d
e
5
4 3 2
7
a bc 6
1
d
e
5
4 3 2
7
a bc 6
1
轮系可使带轮得到六种速度
d e 5 4 3 2 7 a bc 6
1
4,实现换向传动
换向机构
1
机械基础 轮系传动——第十一章

解:利用公式: 利用公式:
n1 Z 2 Z3 Z 4 Z5 Z 6 Z7 i17 = = n7 Z1Z 2' Z3' Z 4 Z5' Z6' 36 * 80 *18 * 30 * 30 * 60 = 18 * 20 * 20 *18 *15 * 2 = 720 ,逆时针方向) (↑
变速器
差速器
第一节
二、轮系分类
轮系的类型
根据齿轮系运转时齿轮的轴线位置相对于机架是否固定, 根据齿轮系运转时齿轮的轴线位置相对于机架是否固定,可将齿 轮系分为三大类:定轴齿轮系、周转轮系和复合轮系。 轮系分为三大类:定轴齿轮系、周转轮系和复合轮系。 平面定轴轮系 定轴轮系(轴线固定) 定轴轮系(轴线固定) 空间定轴轮系 差动轮系(F=2) 差动轮系(F=2) 轮系分类 周转轮系(轴有公转) 周转轮系(轴有公转) 行星轮系(F=1) 行星轮系(F=1) 复合轮系(两者混合) 复合轮系(两者混合)
2)画箭头表示首末两轮的转向关系
a.圆柱齿轮: 圆柱齿轮: 圆柱齿轮
b.圆锥齿轮: 圆锥齿轮: 圆锥齿轮
b.蜗杆传动: 蜗杆传动: 蜗杆传动 2 1
2 1
右旋蜗杆
例题1. 图所示空间定轴轮系中, =15, 例题1. 图所示空间定轴轮系中,已知各轮的齿数为z1=15, z2=25,z3=14,z4=20,z5=14,z6=20,z7=30,z8=40,z9=2(右 =25, =14, =20, =14, =20, =30, =40, =2( =60。试求:( :(1 ;(2 r/min, 旋),z10=60。试求:(1)传动比i1 10;(2)若n1=200 r/min, 向看去,齿轮1顺时针转动, 从A向看去,齿轮1顺时针转动,求n7和n10。
轮系知识题及答案解析(改)

11-1 在图示的轮系中,已知各轮齿数为z z z z z 1235620=====,已知齿轮1、4、5、7为同轴线,试求该轮系的传动比i 17。
11-2 在如图所示的电动三爪卡盘传动轮系中,已知各轮齿数为16z =,2225z z '==,357z =,456z =,试求传动比14i 。
11-3 在图示轮系中,已知各轮齿数为120z =,234z =,318z =,436z =,578z =,6726z z ==。
试求传动比1H i 。
11-6 在图示的轮系中,已知各轮齿数为122z =,388z =,46z z =,试求传动比16i 。
11-8 求图示卷扬机减速器的传动比1H i 。
若各轮的齿数为124z =,248z =,230z '=,360z =,320z '=,440z =,4100z '=。
11-10 在图示的轮系中,已知各轮齿数:11z =,240z =,224z '=,372z =,318z '=,4114z =,蜗杆左旋,转向如图示。
求轮系的传动比1H i ,并确定输出杆H 的转向。
11-11 在图示轮系中,各轮模数相同,均为标准齿轮,各轮齿数如下,z z 123050==,,z z z z 4678100303050====,,,,z z 10550120==,。
试求轴Ⅰ、Ⅱ之间的传动比I,IIi 。
第十一章 轮系习题答案11-1(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)i z z z z z z z z z z 17323467123561=-()=-⨯⨯=-1006020201511-2(1)三爪卡盘传动轮系是一个行星轮系,它可以看作由两个简单的行星轮系组成。
第一个行星轮系由齿轮1、2、3和行星架H 所组成;第二个行星轮系由齿轮3、2、2'、4和行星架H 组成。
机械原理课后答案第十一章作业
11-5 图a 、 b所示为两个不同结构的圆锥齿轮周转轮系,已知z1=20, z2=24,z2′=30,z3=40,n1=200r/min,n3= -100r/min。求两轮系 nH= ?(下面给出了计算结果,请检查所列算式、计算结果、 转向的判断是否正确,若正确请打“√”。)
解:1)图a: n1 n H = i13 H = n3 n H
z 2 z 3 24 40 =1.6 = z1 z 2 20 30
nH = (i13 H n3- n1) / (i13 H - 1) = [1.6×(-100) -200] / (1.6 - 1) = - 600 r/min
25 24 121 =5.6 30 24 18
n6 = ( n1 - nH) / i16 H + nH 当n1=48~200r/min时,则
n6 = ( 48 - 316) / 5.6 + 316 ~ ( 200 - 316) / 5.6 + 316
= 268.14 ~ 295.29 (r/min)
3. 由演算结果可见,若转化轮系传动比的“±”号判断错误,不仅会 影响到 周转轮系传动比大小 ,还会影响到 周转轮系中构件的转向 。
11-6 图示为纺织机中的差动轮系,设z1=30,z2=25,z3 = z 4= 24, z5=18,z6=121, n1=48~200r/min,nH= 316r/min。求n6= ? 解:差动轮系:1—2=3—4=5—6(H) z2 z4 z6 n1 n H H i16 = = - z1 z 3 z 5 n6 nH =
n1 n H - z 2 z 4 z 6 z 7 = z1 z 3 z 5 z 6 n7 nH
第11章 轮系习题答案

5’-6-6’-7(8)组成差动轮系
(2)
(3)
关联: (4)
联立解以上方程得到
也就是说,当齿轮7转动一圈时,齿轮8要反方向专动22.27圈,二者的方向相反。
解:1、2为定轴轮系
方向。
2'、3、3'、4、B为周转轮系。
, 。
转向同 。
10、在图示的复合轮系中,设已知n1=3549r/min,又各轮齿数为z1=36,z2=60,z3=23,z4=49,z4’=69,z6=131,z7=94,z8=36,z9=167,试求行星架H的转速 (大小及转向)?
解:转向用画箭头的方法表示
一、填空题:
1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;
周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架 。
4.行星轮系具有1个自由度,差动轮系有2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
(1)说明轮系属于何种类型;
(2)计算齿轮4得转速 ;
(3)在图中标出齿轮4的
(3) 方向←。
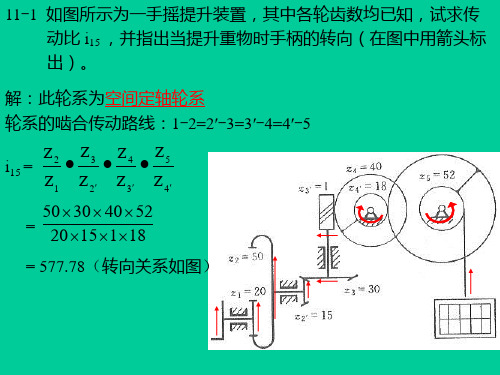
4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比 ,并指出当提升重物时手柄的转向(从左往右看时的转向)
解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
6、在图示自动化照明灯具的传动装置中,已知输入轴的转速n1=19.5r/min,各齿轮的齿数为z1=60,z2=z3=30,z4=z5=40,z6=120,求箱体B的转速nB。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的角速度为0。
A 太阳轮
B 行星轮
C 行星架 D 机架
3. 差动轮系是指自由度
。
A 为1的周转轮系 B 为2的定轴轮系 C 为2的周转轮系
4. 周转轮系的传动比计算应用了转化机构的概念,对应周转轮系的转化机
构乃是
。
A 定轴轮系
B 行星轮系
C 混合轮系
D 差动轮系
三、计算分析题
1.
已知轮系中
z1
=60,
6. 差动轮系和行星轮系的最本质区别是______________________________。
7.具有确定运动的差动轮系中其原动件数目为
。
二、选择题
1. 下面给出图示轮系的三个传动比计算式, 为正确的。
A
i1H2
1 H 2 H
B
i1H3
1 H 3 H
C
i2H3
2 3
H H
2. 周转轮系的转化轮系中
z2
=15,
z
2
=20,各系模数均相同,求
z3
及
i1H
。
2. 在如图所示的电动三爪卡盘传动轮系中,已知各轮齿数为 z1 =6,z2 = z2 =25, z3 =57, z4 =56,试求传动比 i14 。
第十一章 轮系
学号
姓名
一、填空题
1. 所谓定轴轮系是指_
_,而周转轮
系是指。2. 在周轮系中,轴线固定的齿轮称为;兼有自转和公转的齿
轮称为
;而这种齿轮的动轴线所在的构件称为
。
3. 按照轮系运转时轴线位置是否固定,将轮系分为定轴轮系和
。
4. 按照自由度的数目周转轮系又分为
和
。
5. 周转轮系的基本构件是___________________________ ____________。