第11章 混合轮系
第十一章轮系知识材料

第十一章轮系1 什么是惰轮?2惰轮在轮系中起什么作用?3 在定轴轮系中,如何来确定首、末两轮转向间的关系?4 什么叫周转轮系的"转化机构"?5周转轮系的"转化机构"在计算周转轮系传动比中起什么作用?6 在差动轮系中,若已知两个基本构件的转向,如何确定第三个基本构件的转向?7周转轮系中两轮传动比的正负号与该周转轮系转化机构中两轮传动比的正负号相同吗?为什么?8 如何从复杂的混合轮系中划分出各个基本轮系?9 计算混合轮系传动比的基本思路是什么?能否通过给整个轮系加上一个公共的角速度(–ω)的方法来计算整个轮系的传动比?10 周转轮系中各轮齿数的确定需要满足哪些条件?11在图示轮系中,单头右旋蜗杆1的回转方向如图,各轮齿数分别为Z2=37,Z2′=15,Z3=25,Z3′=20,Z4=60,蜗杆1的转速n1=1450r/min,方向如图。
试求轴B的转速nH的大小和方向。
12 在图示轮系中,已知:各轮齿数为Z1= Z3= Z4′=15,Z2=60,Z4= Z5=30,试求传动比i15:13 已知图示轮系中各轮的齿数:Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min14在图(7)所示的轮系中,已知Z1=20,Z2=40,Z2′=30,Z3=100 ,Z4=90,求i14的大小15 在图(8)所示的轮系中,已知Z1=Z4′=40, ,Z1′=Z2= Z4=20, ,Z2′=30, Z3=30,Z3′=15,试求: i1H16 图示(10)的轮系中,已知各齿轮齿数Z1=20,Z2=30,Z3=80,Z4=40,Z5=20,轮1的转速n1=1000 r/min,方向如图,试求:轮5的转速n5的大小和方向。
17图示(16)轮系中,各齿轮为渐开线标准圆柱齿轮,作无侧隙传动,他们的模数也均相等,其转向见图,且已知齿轮1、2,及2′齿数分别为Z1=20,Z2=48,Z2′==20,求齿轮3齿数和传动比i1H。
思考题——精选推荐

第二章 预习思考题1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副?它们的运动简图符号分别如何表达? 2、平面机构中的低副和高副各引入几个约束?3、机构具有确定相对运动时,机构自由度数和原动件数之间具有什么关系?4、什么是机构运动简图,绘制机构运动简图的基本方法是什么?5、用机构运动简图表示你家中的缝纫机的踏板机构。
6、计算平面机构自由度时,应注意哪三个问题?6、 机构具有确定运动的条件是什么?如果不能满足这一条件,将会产生什么结果? 7、 平面机构中的虚约束常出现在哪些场合? 8、怎样处理复合铰链和局部自由度? 9、机构组成原理是什么? 10、如何判定机构级别?第三章 预习思考题1、机构速度分析图解法可分为哪两种?2、什么叫瞬心?用什么符号表示?3、什么叫绝对瞬心?什么叫相对瞬心?4、什么叫三心定理?它的作用是什么?5、什么叫机构的封闭矢量方程式?6、什么叫速度影像和加速度影像原理?它的适用范围7、用相对运动图解法求加速度时,什么时候有哥氏加速度?8、速度瞬心法只适用于求什么?第八章 预习思考题第八章 预习思考题1、连杆机构的主要优缺点。
2、铰链四杆机构有哪三种基本型式?3、何谓连架杆?何谓连杆?何谓曲柄?何谓摇杆?4、何谓倒置法?试举三例说明机构的演化。
5、何谓“杆长之和条件”?机构中具有双周转副的构件是否是最短杆?6、铰链四杆机构、曲柄滑块机构中存在周转副的条件分别是什么?7、曲柄摇杆机构中,极位夹角和摆角有何区别? 8、何谓压力角?何谓传动角?何谓死点? 9、机构死点位置与极限位置有何区别? 10、如何用反转法图解综合平面四杆机构?第九章 预习思考题1.在直动从动件盘形凸轮机构中,试问同一凸轮采用不同端部形状的从动件时,其从动件运动规律是否相同?为什么?2.设计哪种类型的凸轮机构时可能出现运动失真?3.当出现运动失真时应该考虑用哪些方法消除?4.何谓凸轮机构的压力角?它在凸轮机构的设计中有何重要意义?5.直动从动件盘形凸轮机构压力角的大小与该机构的哪些因素有关?6.在直动从动件盘形凸轮机构中,若凸轮作顺时针方向转动,从动件向上移动为工作行程,则凸轮的轴心应相对从动件导路向左偏置还是向右偏置为好?为什么?7.若从动件导路偏置得太多会有什么问题产生? 8.当设计直动从动件盘形凸轮机构的凸轮廓线时,若机构的最大压力角超过了许用值,试问可采用哪几种措施来减小最大压力角或增大许用压力角? 9.在图示直动尖顶从动件盘形凸轮机构中,凸轮转向如图所示,说明从动件相对凸轮轴心的配置是否合理,为什么?10.有一对心直动尖顶从动件盘形凸轮机构,为改善从动件尖端的磨损情况,将其尖端改为滚子,仍使用原来的凸轮,这时该凸轮机构中从动件的运动规律有无变化?简述理由。
《轮系及计算》课件

齿轮的几何参数
齿数:齿轮的 齿数是决定齿 轮传动比的重
要参数
模数:齿轮的 模数是决定齿 轮尺寸的重要
参数
齿距:齿轮的 齿距是决定齿 轮传动精度的
重要参数
齿形角:齿轮 的齿形角是决 定齿轮传动效 率的重要参数
齿轮的传动比
齿轮传动比:两个齿轮的齿数之比 传动比公式:i=n1/n2,其中i为传动比,n1和n2分别为主动轮和从动轮的齿数 传动比的作用:改变转速和扭矩 传动比的选择:根据实际需求选择合适的传动比,以实现预期的转速和扭矩
05 轮系的计算方法
齿轮的啮合关系
齿轮的啮合关系是指两个齿轮在传动过程中相互接触、相互啮合的状态。
齿轮的啮合关系可以分为直齿圆柱齿轮啮合、斜齿圆柱齿轮啮合、人字齿轮啮合等。
齿轮的啮合关系直接影响到传动的平稳性、效率和寿命。 齿轮的啮合关系可以通过计算齿轮的模数、齿数、压力角等参数来确定。
轮系的传动比计算
轮系的设计实例分析
实例一:自行车轮系设计 实例二:汽车传动轮系设计 实例三:工业机器人轮系设计 实例四:航空航天轮系设计 实例五:医疗设备轮系设计 实例六:家用电器轮系设计
感谢您的观看
汇报人:
06 轮系的设计与优化
齿轮的设计原则
齿形选择: 根据使用 环境和负 载选择合 适的齿形
齿数选择: 根据传动 比和转速 选择合适 的齿数
齿宽选择: 根据载荷 和强度要 求选择合 适的齿宽
齿距选择: 根据传动 精度和噪 音要求选 择合适的 齿距
齿面硬度: 根据使用 环境和载 荷选择合 适的齿面 硬度
04 轮系的工作原理
齿轮的工作原理
齿轮的组成:齿数、模数、齿 距、齿形等
齿轮的传动原理:通过啮合传 递动力和运动
混合轮系名词解释

混合轮系名词解释
嘿,朋友们!今天咱来聊聊混合轮系呀!你说这混合轮系就像是一个奇妙的机械大杂烩。
想象一下,你家里的各种物件,有大有小,有圆有方,它们组合在一起能发挥出各种奇妙的作用。
混合轮系不就类似嘛!它里面既有定轴轮系的部分,又有周转轮系掺和在里头。
定轴轮系就像是家里那些稳稳当当放在那儿的家具,它们可靠又稳定。
而周转轮系呢,就好像是那些会转动的小玩具,充满了活力和变化。
这两者一结合,哇塞,那可真是不得了!
混合轮系能实现好多复杂的传动比呢!就好像你要完成一个超级复杂的任务,光靠一种方法可不行,得多种手段一起上。
它可以让机器的运转变得更加灵活多变,适应各种不同的需求。
你说这混合轮系是不是很神奇?它在各种机械设备里可发挥了大作用呢!比如那些大型的工业机器,没有混合轮系的巧妙组合,怎么能高效地工作呢?它就像是一个幕后英雄,默默地奉献着自己的力量。
咱再打个比方,混合轮系就像是一个优秀的团队。
团队里有各种不同性格、不同能力的人,大家齐心协力,才能把事情干好。
定轴轮系就像是踏实肯干的成员,而周转轮系就像是充满创意的那部分人,他们在一起,就能创造出惊人的成果。
你看那些汽车、机床啥的,里面都有混合轮系的功劳呀!没有它,这些东西能这么好用吗?混合轮系让一切变得有可能,让机械的世界更加丰富多彩。
总之,混合轮系可不是一般的厉害,它是机械领域里的一颗璀璨明星!它让我们的生活变得更加便捷、高效,我们真得好好感谢它呢!。
机械设计基础——轮系
现代机械中,为了满足不同的工作要求只用一对齿轮传动 往往是不够的,通常用一系列齿轮共同传动。这种由一系列齿 轮组成的传动系统称为齿轮系(简称轮系)。
本章主要讨论轮系的类型、传动比计算及轮系的功用。
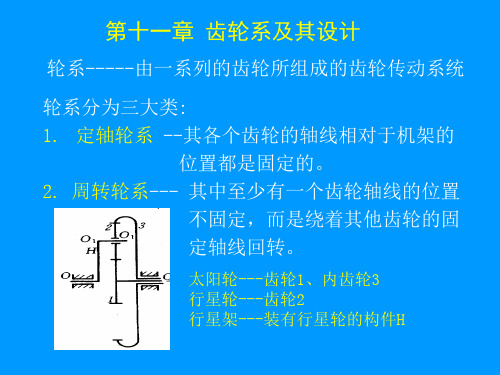
齿轮系的类型
1.按组成轮系的齿轮(或构件)的 轴线是否相互平行可分为: 平面轮系和空间轮系
2.根据轮系运转时齿轮的轴线位置 相对于机架是否固定可分为两大类: 定轴轮系和周转轮系
3.对于差动轮系,必须给定n 1 、 n k 、n H中任意两个(F=2,
两个原动件),运动就可以确定。对于简单周转轮系,有一太
阳轮固定(n k=0),在n 1 、n H只需要给定一个(F=1,需要一
个原动件),运动就可以确定。
例:如图所示的周转轮系中,已知各 轮齿数为Z1=100, Z2=99, Z3=100, Z4=101 ,行星架H为原动件,试求传 动比iH1=?
齿数连 乘积 齿数连 乘积
注意:
1.公式只适用于平面周转轮系。正、负号可按画箭头的方法来 确定,也可根据外啮合次数还确定(-1)m。对于空间周转轮 系,当两太阳轮和行星架的轴线互相平行时,仍可用转化轮系 法来建立转速关系式,但正、负号应按画箭头的方法来确定。
2.公式中的“+”、“-”号表示输入和输出轮的转向相同或相反。
Z2 Z4 Z1 Z3
n H = - 50/6 r/min 负号表示行星架与齿轮1转向相反。
2.求n3
:(n3
i1H2
=
nn21)- n H
n
-
2
n
H
Z2 Z1
n 2 = - 133 r/min = n3
负号表示轮3与齿轮1转向相反。
混合轮系传动比的计算
第11章 轮系-复合轮系
例6:图示为一电动卷扬机的减速器运动简图, 已知:z1=24,z2=33,z’2=21,z3=78,z’3=18, z4=30,z5=78,试求传动比 i15。
解: 1)齿轮 1 - 2 - 2’ - 3 - H
(齿轮5)组成差动轮系;
2 4
z2 z3 1 H 1 5 i 3 H 3 5 z1 z 2
动画1 动画2 动画3
本章结束
返回
A
D
B C
5
4
P
2 H
3
1
车轮
H 2L
33 78 78 1 1 28.24 24 21 18
§11-5
轮系的功用
一、实现分路传动:
利用轮系可以使一个主 动轴带动若干个从动轴
同时旋转,并获得不同ຫໍສະໝຸດ 的转速。二、获得较大的传动比
采用周转轮系,可以在使用很 少的齿轮并且也很紧凑的条件 下,得到很大的传动比。
例5: 如图所示的轮系中,设已知各轮齿数,
试求其传动比。 解:1) 齿轮123H1组成行 星轮系:
i1 H 1 1 i
H1 13
z3 1 z1
z6 1 z4
2) 齿轮456H2组成行 星轮系:
i4 H 2 1 i
H2 46
i1 H 2
z3 z6 i1 H1 i4 H 2 1 1 z1 z4
汽车后桥的差动器能根据汽车不同的行驶状态,
自动将主轴的转速分解为两后轮的不同转动。
n1 r L n3 r L
图片
z1=z3 , nH=n4
动画1 动画2 动画3 动画4
西北工业大学机械原理课后答案第11章

西北工业大学机械原理课后答案第11章第11章课后参考答案11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定?答:参考教材216~218页。
11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的传动比时,是否应把齿轮5的齿数,Z5计入?答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部分关键是要把其中的周转轮系部分划出来,周转轮糸的特点是具有行星轮和行星架,所以要先找到轮系中的行星轮,然后找出行星架。
每一行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成一个基本周转轮糸。
在一个复合轮系中可能包括有几个基本周转轮系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。
在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。
11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的? 答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。
11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号?答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。
使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。
机械原理,孙恒,西北工业大学版第11齿轮系及其设计
定轴轮系的传动比 =
所有主动轮齿数连乘积
规定:首、末两轮转向相同时, 其传动比为“+” ,反之为“— ”。 当有空间齿轮时,转向关系 的确定,只能画箭头
本例中,轮2为惰轮 (或程过桥轮、中介轮)
§11-3 周转轮系的传动比 11给整个周转轮系加上 一个公共角速度“ωH” ωH -ωH=0 ,即行星 架“静止不动”,周 转轮系转化为定轴轮 系 (转化轮系) ω1H=ω1-ωH ω2H=ω2-ωH ω3H=ω3-ωH ωHH=ωH-ωH=0
特别注意:“±” ,须由转化轮系中m、n两轮的 转向关系来确定
§11—4 复合轮系的传动比 11 4
注意几点: 1.必须正确地将轮系中的各组成部分加以划分 (找出行星架,并注意行星架往往是由轮 系 中具有其他功用的构件所兼任) 2.列出各组成轮系的传动比计算公式。 3.联解方程
例1. 图示的轮系,设已知各轮齿数,试求其 传动比 i1H
,
(3)联解方程
ω1 −ωH z2 z3 = ω3 −ωH z1z2
200 −ωH 40 ⋅ 24 = −100 −ωH 30 ⋅ 20
nH = −600
§11—5 轮系的功用
1.实现分路传动 2.获得较大的传动比 3. 实现变速传动 4.实现换向传动 5.用作运动的合成和分解 6.在尺寸及重量较小的条件下,实现 大功率传动
解: (1)区分轮系
2’—3 — 4 — H 周转轮系 1 — 2 定轴轮系
(2)列方程
n1 z2 40 i12 = = − = − = −2 n2 z1 20
i2′H = 1 − i2′4 = 1 − (−z4 / z2′ ) = 1 + 80 / 20 = 5
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十一章 轮系及其设计
第四节 混合轮系传动比的计算
一、串联式混合轮系 二、封闭组合式混合轮系 三、叠加组合式混合轮系
混合轮系传动比计算步骤:
1.判别该轮系由几种轮系组成的,各轮系如何连接 2.列出各轮系的传动比计算式 3.根据各基本轮系间的连接关系,将各计算式联立
求解
第四节 混合轮系传动比的计算
一、串联式混合轮系
基本思路 前一个轮系的输出构件与后一基本轮系的输入构件固 接组合而成的混合轮系。 整个混合轮系传动比,等于所串联的各轮系传动比的 连乘积。
第四节 混合轮系传动比的计算
一、串联式混合轮系
例11-4
已知:各轮齿数,n1 = 300 r min 求:系杆H的转速nH的大小和转向 解:
= −4
3.联立求解 nH = −30 r min
第四节 混合轮系传动比的计算
一、串联式混合轮系
二、封闭组合式混合轮系
差动轮系的两个构件和自由度为1的轮系封闭联接,形成一个自 由度为1的混合轮系。 被联接的两个构件间始终保持一定的运动约束关系。 例11-5 已知:各轮齿数
z1 = 24, z2 = 52, z2′ = 21, z3 = 78, z3′ = 18, z4 = 30, z5 = 78
运动合成
iH
13
= n1H n3H
= n1 − nH n3 − nH
= − z3 z1
= −1
z1 = z3
nH = (n1 + n3 ) / 2
应用实例:机床、计算机构和补偿装置等。
第五节 轮系的功能及其应用
三、实现运动的合成与分解 运动分解
nH = (n1 + n3 ) / 2
n3 n5
=
(r (r
=
z7 z6
=
n6 − nH 0 − nH
周转轮系:3、4、5和h 3.联立求解上述三个方程
i3h5
=
n3 − nh n5 − nh
= n3 − n6 nH − n6
= − z5 z3
i1H
=
1+
z2 z7 z1z6
(1 +
z5 z3
)
第四节 混合轮系传动比的计算
第十一章 轮系及其设计
第五节 轮系的功能及其应用
( z1
+
z2 ) sin
π K
>
z2
+ 2ha∗
第七节 行星轮系的设计
本章重点
1、轮系的类型、轮系的功用 2、定轴轮系传动比的计算 3、周转轮系传动比的计算 4、复合轮系传动比的计算
1.划分基本轮系 周转轮系:2’、3、4和H 定轴轮系:1、2
第四节 混合轮系传动比的计算
一、串联式混合轮系
2.列方程
定轴轮系:1、2
i12
=
n1 n2
=
−
z2 z1
=
− 40 20
=
−2
周转轮系:2’、3、4和H
iH 2′4
=
n2′ − nH n4 − nH
= − z4 z 2′
= − 80 20
i1H3
=
ω1 ω3
− ωH − ωH
=
ω1 − ωH 0 −ωH
= 1 − i1H
=
−
z3 z1
z3 = (i1H − 1)z1
第七节 行星轮系的设计
二、周转轮系各轮齿数的确定
2、满足同心条件
行星轮系中各基本构件的回转轴线必须重合。
1 2
m( z1
+
z2
)
=
1 2
m( z3
−
z2
)
z2
=
z3
− 2
z1
满足同心条件,两个中心轮的齿数应同为奇数或偶数。
第七节 行星轮系的设计
二、周转轮系各轮齿数的确定
3、装配条件
当轮系中有两个以上行星轮时,将每一个行星轮均匀地装入 两中心轮之间。应使两中心轮的齿数之和应为行星轮个数的 整数倍。设安装K个行星轮,则有:
n = z1 + z3 K
4、邻接条件
保证相邻两行星轮运动时不发生相互碰撞。
选型考虑因素: 传动比范围、效 率高低、结构复 杂程度、外廓尺 寸大小以及功率 流动情况等。
第七节 行星轮系的设计
二、周转轮系各轮齿数的确定
齿数的选择要考虑以下因素 1、传动比条件 2、同心条件 3、装配条件 4、邻接条件
第七节 行星轮系的设计
二、周转轮系各轮齿数的确定
1、 传动比条件
满足要求的传动比,或者在其允许误差的范围内
− +
L) L)
直线行驶,r=∞,n3=n5=nH
第五节 轮系的功能及其应用
n3
=
r
− r
L
nH
n5
=
r
+ r
L
nH
四、其他
u 分路传动 u 远距离传动 u 大功率传动
第五节 轮系的功能及其应用
第十一章 轮系及其设计
第七节 行星轮系的设计
一、选择周转轮系的类型 二、周转轮系各轮齿数的确定
一、选择周转轮系的类型
× ×
78 21
=
−8.05
n5
定轴轮系:3’、4、5
i3′5
=
n3′ n5
=
− z5 z3′
= − 78 18
3.联立求解
i15
=
n1 n5
=
+43.9
第四节 混合轮系传动比的计算
三、叠加组合的混合轮系
一个轮系安装在另一个轮系的活动构件上(一般安在系杆上) 的混合轮系,称为叠加轮系或多重轮系。 例11-6 已知:各轮齿数
求:轮系的传动比i1H
解:1.划分基本轮系 周转轮系:1、2、 H 、6、7 周转轮系:3、4、5和h
第四节 混合轮系传动比的计算
三、叠加组合的混合轮系
2.列方程 周转轮系: 1、2、H; 6、7 、H
i1H2
=
n1 − nH n2 − nH
= − z2 z1
i6H7
=
n6 n7
− nH − nH
一、获得大的传动比 二、实现变速、换向传动 三、实现运动的合成与分解
一、获得大的传动比
iH1
=
ωH ω1
=
1 i1H
= +10000
第五节 轮系的功能及其应用
二、实现变速、换向传动
1、滑移齿轮变速
z1
z3
1轴
2轴
z2
z4
2、行星齿轮变速 3、实现变向传动
第五节 轮系的功能及其应用
三、实现运动的合成与分解
求:传动比i15 解:1.划分基本轮系
差动轮系:1、2-2’、3和H 定轴轮系:3’、4、5
第四节 混合轮系传动比的计算
二、封闭组合式混合轮系
列方程
周转轮系: 1、2-2’、3和H
n1 − 1
i1H3
=
i153
=
n1 n3
− n5 − n5
=
n5 n3
−1
=
−
z2z3 z1 z2′
=
−
52 24