四旋翼飞行器无线遥控技术
飞行器原理

5 结论
文中所设计的四旋翼飞行控制软硬件系统对四旋翼飞行器的飞行控制取得了比较好的效果,通过试飞实验表明,在本飞控系统的控制下,四旋翼具有较好的稳定性,基本达到了设计目标。同时本设计充分利用了STM32单片机丰富的片内资源,程序均采用模块化设计,稍作修改即可很容易地移植到其他飞行器上,具有较好的可移植性,缩短了系统软硬件的开发周期,为下一步搭载实验各类任务设备奠定了基础。
2.2.2 超声波传感器
用于测量高度的超声波传感器采用SensComp公司的615088传感器,它具有两种模式:触发测距模式和5 Hz自动测距模式。测量范围:0.15~10.7 m,测量精度:0.1%。
STM32采用捕获中断方式测得超声波发送的边沿跳变信号与经障碍物反射回来的超声波边沿跳变信号,做差换算得到超声波模块与障碍物的距离。实测在0.2~10 m范围内的距离,其测距误差不超过0.1%,满足四旋翼飞行器飞行的精度要求。
飞控系统的总体设计方案:
如图1所示(未附图)。系统核心控制器为一款基于ARM cortex—M3内核的单片机;
惯性测量元件(IMU)主要提供解算飞行器姿态的数据等信息;高度传感器采用超声波传感器,
输出相对地面的高度信息;接收机接收遥控器发出的杆量信号,这些信号将用于控制器的输入;
拥有512K字节的闪存程序存储器和高达64K字节的SRAM,最多可达112个快速I/O端口,多达4个16位定时器,
5个USRAT、3个SPI、2个I2C、1个CAN、1个USB2.0全速接口。具有优异的实时性能,同时拥有丰富而规范的固件库,适合飞控板的开发。
飞控板采用最小系统加全部接口引出的设计,即保证系统能够正常工作的前提下,引出所有扩展接口以方便后续实验开发的功能扩展。
四轴飞行控制原理
四轴飞行控制原理四轴飞行器是一种具有四个旋翼的飞行器,通过控制旋转速度和方向来实现飞行。
其控制原理包括传感器感知、飞行动力学建模、控制器设计和电机控制。
1.传感器感知四轴飞行器通常配备有陀螺仪、加速度计、磁力计和气压计等传感器。
陀螺仪用于测量飞行器的角速度,加速度计用于测量线性加速度,磁力计用于测量地磁场方向,气压计用于测量飞行器的高度。
这些传感器可以提供飞行器在空间中的姿态、位置和速度等信息。
2.飞行动力学建模通过传感器测量的数据,可以对飞行器的姿态进行估计。
姿态估计主要包括姿态角(滚转、俯仰和偏航)的估计和位置的估计。
将姿态和位置的估计值与期望值进行比较,可以得到姿态和位置的误差。
飞行动力学建模主要包括飞行器的动力学方程和状态方程,可以通过这些方程来描述飞行器的姿态、位置和速度等动态变化。
3.控制器设计控制器设计主要是设计一个控制算法来根据传感器测量的数据和期望的姿态和位置来控制飞行器的旋转速度和方向。
通常使用的控制算法包括PID控制器、模型预测控制器、自适应控制器等。
PID控制器是一种常用的控制算法,根据误差的大小和变化率来调整控制信号,从而使飞行器逐渐接近期望的姿态和位置。
4.电机控制四轴飞行器通常使用四个无刷电机来控制旋翼的转速和方向。
通过适当调整电机的转速,可以使飞行器产生所需的推力和力矩,从而实现期望的运动。
电机控制主要包括PWM控制信号的生成、电机转速的调节和电机的航向控制。
PWM控制信号的生成由控制器完成,根据控制器的输出调整电机转速,使旋翼产生所需的推力和力矩。
电机的航向控制通常通过改变电机的转速来实现。
总结:四轴飞行控制原理主要包括传感器感知、飞行动力学建模、控制器设计和电机控制。
通过传感器感知飞行器的角速度、线性加速度、地磁场方向和高度等信息,通过飞行动力学建模估计飞行器的姿态和位置,根据期望的姿态和位置与估计值的误差,设计控制算法来控制飞行器的旋转速度和方向,通过调整电机的转速,使飞行器产生所需的推力和力矩,从而实现期望的飞行。
四旋翼飞行器飞行控制技术综述
四旋翼飞行器飞行控制技术综述四旋翼飞行器是一种具有四个独立旋翼的飞行器,也被称为四轴飞行器。
它采用借助电子设备来保持平衡和方向飞行,是一种近年来非常流行的飞行器类型。
四旋翼飞行器飞行控制技术是指通过控制器、传感器和电动机等设备来实现飞行器的稳定飞行和精确控制。
本文将对四旋翼飞行器的飞行控制技术进行综述,包括传感器、飞行控制器、电机及螺旋桨、遥控器等方面。
一、传感器四旋翼飞行器的传感器是实现飞行控制的基础,它主要包括加速度计、陀螺仪、磁力计和气压计等。
加速度计用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向,气压计用于测量飞行器的高度。
这些传感器可以实时地将飞行器的状态信息传输给飞行控制器,从而帮助控制器实现飞行器的稳定飞行和精确控制。
二、飞行控制器飞行控制器是四旋翼飞行器的大脑,它通过接收传感器传来的信息,计算飞行器的状态,再根据飞行器的状态信息来控制电机的转速和螺旋桨的转动角度,从而实现飞行器的稳定悬停、方向飞行、姿态调整等功能。
目前市面上比较常见的飞行控制器有OpenPilot、Pixhawk、Naze32等,它们都能够提供强大的飞行控制功能,同时还支持GPS导航、航点飞行、自动返航等高级功能。
三、电机及螺旋桨四旋翼飞行器通常采用无刷电机驱动螺旋桨进行飞行,电机及螺旋桨的选择直接影响飞行器的性能和稳定性。
在选择电机时需要考虑电机的功率、转速、推力、以及电机的重量和尺寸等参数,同时还需要考虑螺旋桨的直径、螺距、材质等参数。
合理的电机及螺旋桨搭配可以为飞行器提供足够的推力和稳定性,从而保证飞行器的良好飞行表现。
四、遥控器遥控器是飞行器的操控装置,通过遥控器可以实现飞行器的起飞、降落、悬停、前进、后退、左转、右转等操作。
目前市面上比较常见的遥控器有Futaba、FrSky、Spektrum等,它们都能够提供可靠的无线控制信号,从而保证飞行器的操控精准和稳定。
在实际的飞行控制中,通常采用PID控制算法来实现对飞行器的姿态调整和稳定飞行。
四旋翼飞行器结构

四旋翼飞行器结构1. 概述四旋翼飞行器是一种利用四个对称排列的旋翼进行垂直起飞、悬停和操纵的飞行器。
其优势包括垂直起降、悬停能力强、灵活机动、飞行稳定等。
在无人机领域中,四旋翼飞行器已经得到了广泛应用,如航拍摄影、应急救援、农业植保等。
2. 结构组成四旋翼飞行器的结构组成主要包括机身、四个旋翼、电池、控制系统等组件。
2.1 机身四旋翼飞行器的机身是整个飞行器的主体部分,起到支撑和连接其他组件的作用。
通常由轻质材料制成,如碳纤维、玻璃纤维等,以提高飞行器的强度和降低重量。
机身的设计通常考虑空气动力学性能、结构强度和易制造性。
2.2 旋翼四旋翼飞行器通过四个对称排列的旋翼进行飞行。
旋翼包括电动机、螺旋桨和支撑梁等部分。
电动机作为旋翼的动力源,驱动螺旋桨旋转产生升力。
螺旋桨通过变化旋转速度和角度来控制飞行器的悬停、升降、前进、转向等动作。
支撑梁连接旋翼和机身,起到支撑和传递动力的作用。
2.3 电池四旋翼飞行器的电池是提供动力的重要组成部分。
通常使用锂电池作为飞行器的能源来源,具有高能量密度和长飞行时间的优势。
电池的选择应考虑飞行器的重量和飞行时间的需求,并且要遵循安全使用和充电的原则。
2.4 控制系统四旋翼飞行器的控制系统包括飞行控制器和遥控器。
飞行控制器是飞行器的大脑,通过接收遥控器的信号和传感器的数据,计算出飞行器的状态和控制指令,并控制旋翼的转速和角度。
遥控器是操作飞行器的手持装置,通过无线信号与飞行控制器进行通信,传输操纵指令。
3. 工作原理四旋翼飞行器通过控制旋翼的转速和角度来产生升力和推力,从而实现飞行。
通过改变旋翼的转速差异,可以实现飞行器的前进、转向和悬停动作。
飞行控制器根据遥控器输入和传感器反馈的数据,计算出适当的转速和角度,并通过电调调节电动机的输出,控制旋翼的运动。
4. 稳定性控制四旋翼飞行器的稳定性控制是实现飞行器平稳飞行的关键。
通过加速度计、陀螺仪、磁力计等传感器,飞行控制器可以感知飞行器的姿态和运动状态。
四轴飞行器无线通讯及上位机设计
四轴飞行器无线通讯及上位机设计摘要四轴飞行器,又称四旋翼飞行器,因其起飞和降落所需空间少,在障碍物密集环境下的超控性高,以及它飞行姿态保持平稳能力强的优点,在民间和军事领域有广泛的应用前景。
其中,小型四轴飞行器的研究近年来趋成熟,并未自动控制,先进传感器技术以及计算机科学等诸多技术领域的融合研究提供了一个平台。
本文通过对四轴飞行器的性能指标的分析,明确设计思路及原理,围绕四轴飞行器无线通讯系统、上位机程序等的设计展开讨论,并确定可行方案。
最终提出使用以2.4MHz的无线遥控对其四轴飞行器进行通讯,使用的是NRF24L01无线通讯模块,四轴飞行器的上位机则用QT进行设计以达成目的。
本次毕业设计主要通过设计上位机控制的飞行器,掌握控制系统的一般设计方法,熟悉常用的元器件,对所学单片机知识进一步强化,了解电路调试仿真的基本方法,培养综合应用所学理论知识来指导设计的能力。
关键字:四轴飞行器,无线通讯,计算机科学Quadrotors’wireless communications and software designAbstractAxis aircraft, also known as four-rotor aircraft,Rotary-wing air-crafts have many military and civilian applications due to their requiring small areas for taking off and landing,great maneuverability in Obstacle-heavy environment and great ability to maintain the position and orientation.The research of small scale quad rotors,one kind of rotary wing air-crafts,have gradually become mature in recent years,and also provided an important platform for investigations in such fields as the autonomous control,advanced sensor technology and computer science.This paper analyzes the performance of four-axis aircraft, a clear design ideas and principles, around quadrocopter wireless communications system designed PC program like to discuss and identify possible options. Finally proposes the use of a wireless remote control aircraft 2.4MHz its axis of communication, using wireless communication module NRF24L01, four aircraft of the PC is used to achieve the purpose of designing QT.The graduation project is mainly controlled by the PC design aircraft, master control system design methods are generally familiar with common components, to further strengthen the learning MCU knowledge to understand the basic method of circuit simulation and debug, develop comprehensive application theoretical knowledge ability to guide the design.Key words: Quadrocopter, Wireless communication, Computer Science目录第一章绪论 (4)1.1 四轴飞行器的发展和现状 (4)1.2 无线通讯概念 (4)1.3 上位机概念 (5)第二章单片机下位机设计 (7)2.1 主要芯片 (7)2.2 无线模块 (8)2.2.1 主要特点 (8)2.2.2 引脚功能 (8)2.2.3 工作模式 (10)2.2.4 工作原理 (10)2.2.5 配置字 (11)2.2 SPI协议 (12)2.3 单片机的通讯技术 (13)2.3.1并行通信 (13)2.3.2 串行通信 (14)2.4 串行通信的方式 (16)2.4.1 单工模式 (16)2.4.2 半双工模式 (16)2.4.2 全双工模式 (17)2.3 系统电路设计 (18)2.4.1 控制器无线模块 (18)2.4.2 四轴飞行器无线模块 (19)2.4 下位机程序设计 (21)第三章基于QT的上位机设计 (22)3.1 Qt工具简介 (22)3.2 Qt窗口部件 (23)3.3 Qt对象模型 (23)3.4 Qt的容器类 (24)3.5 Qt2D绘图 (24)3.5.1基本图形的绘制和填充 (25)3.5.2 坐标系统 (25)3.5.3 其他绘制 (26)第四章系统整体调试 (27)4.1 系统整体流程设计 (27)4.2系统调试 (29)4.3 调试结果分析 (29)第五章结束语 (30)第一章绪论1.1 四轴飞行器的发展和现状四轴飞行器是四桨、非共轴多旋翼飞行器,属于多旋翼飞行器的一种,是一种典型的、完全利用电子控制手段取代机械控制手段的飞行器之一。
毕业设计四旋翼飞行器
毕业设计四旋翼飞行器毕业设计四旋翼飞行器近年来,随着科技的不断发展,四旋翼飞行器成为了一个备受关注的话题。
无论是在军事领域还是民用领域,四旋翼飞行器都展现出了巨大的潜力和广阔的应用前景。
作为毕业设计的选题,四旋翼飞行器无疑是一个令人兴奋的选择。
首先,让我们来了解一下四旋翼飞行器的基本原理。
四旋翼飞行器是一种通过四个对称排列的螺旋桨产生升力,从而实现飞行的无人机。
它的优点在于灵活性高、悬停能力强、机动性好等。
这些特点使得四旋翼飞行器在航拍、勘测、救援等领域有着广泛的应用。
在设计四旋翼飞行器时,我们需要考虑多个方面。
首先是结构设计。
四旋翼飞行器的结构设计涉及到机身、螺旋桨、电机等多个部分。
合理的结构设计能够提高飞行器的稳定性和操控性。
其次是控制系统设计。
四旋翼飞行器的控制系统包括飞行控制器、遥控器等。
优秀的控制系统设计能够提高飞行器的飞行性能和安全性。
最后是能源供应设计。
四旋翼飞行器通常使用电池作为能源供应,因此需要考虑电池容量、充电时间等因素,以确保飞行器的续航能力。
在毕业设计中,我们可以选择不同的方向来进行研究。
一方面,我们可以研究四旋翼飞行器的稳定性和控制性能。
通过对控制算法的优化和飞行器结构的改进,提高飞行器的稳定性和操控性,使其能够在不同环境下完成各种任务。
另一方面,我们可以研究四旋翼飞行器的应用领域。
通过对不同应用领域的需求和特点的分析,设计出适应性强、功能多样的四旋翼飞行器,开拓新的应用市场。
当然,在进行毕业设计的过程中,我们也会面临一些挑战。
首先是技术挑战。
四旋翼飞行器涉及到多个学科的知识,如机械设计、电子技术、控制理论等。
我们需要充分利用所学知识,结合实践经验,解决技术上的问题。
其次是资源挑战。
进行四旋翼飞行器的设计和制作需要一定的资金和设备支持。
我们需要合理安排资源,确保毕业设计的顺利进行。
然而,面对挑战,我们更应该看到四旋翼飞行器的巨大潜力。
四旋翼飞行器不仅可以应用于军事、航拍等领域,还可以用于环境监测、物流配送等领域。
四旋翼飞行器设计第1章
• aeroquad和arducopter基于Arduino的四旋翼飞行器DIY建设开源硬件和软件项目; • Parrot AR.Drone是一款带有摄像机的无线控制的四旋翼飞行器,可以通过智能电
图1-1 Louis Breguet(1907) 4
图1-2 Georgeபைடு நூலகம்de Bothezat (1922.12)
5
图1-3 Curtiss-Wright VZ-7(1958) 6
四旋翼飞行器的研究现状
• 贝尔波音四倾转旋翼机的概念,提出对C-130大型军用运输机采用固定直升机概念 和倾斜转子概念进一步结合;
话和平板设备进行操控
8
9
10
四旋翼无人飞行器设计
冯新宇 范洪刚 辛亮 著 清华大学出版社
第1章 绪论
四旋翼飞行器发展历史
无人机是一种通过无线电遥控设备、或者通过自备程序算法自行控制的不载人飞行。 早在世纪年代初,无人机(就在多次局部战争中施展其无与伦比的优越性,并且为美 国、以色列等国在取得战争的胜利立了赫赫功勒。近三十年的时间里,随着微电子技 术、通信技术、材料及推进系统等技术的迅猛发展,无人飞行器(不仅从外形上出现 了更加独特新颖,而且从性能和功能上更加先进,从一开始的通过地面摇杆控制飞行 器,到用人眼控制飞行器,近些年又出现了用人脑来控制飞行器。由于无人机在作战 中的优异变现,并且具有先天的零伤亡的优势,各国在军事的研宄上都将其作为优先 发展的地位,国际上也掀起了研宄的热潮,其中以美国和以色列位居榜首。
四旋翼飞行器飞行控制技术综述

四旋翼飞行器飞行控制技术综述四旋翼飞行器是一种由四个旋翼组成的无人机,可以垂直起降和定点悬停,具有灵活性和机动性。
它的飞行控制技术可以分为姿态控制和位置控制两种基本类型。
姿态控制是指控制飞行器姿态(包括横滚、俯仰和偏航),而位置控制则是控制飞行器的定点飞行或航线飞行。
下面将对这两种控制技术进行详细介绍。
一、姿态控制技术1. 传统PID控制PID控制是一种经典的控制方法,它通过比例、积分和微分三个分量的组合来调节系统的输出。
在四旋翼飞行器中,PID控制可以用来控制姿态,使飞行器保持平稳的飞行状态。
通过对角速度和角度的反馈控制,可以实现对飞行器姿态的精确控制。
但是PID控制也存在一些问题,比如对于非线性系统和参数变化的系统,PID控制的性能会受到影响。
2. 模糊控制模糊控制是一种可以应对非线性系统和模糊环境的控制方法。
在四旋翼飞行器中,可以利用模糊控制来实现对姿态的精确控制。
通过建立模糊规则库,可以将模糊的输入与输出进行映射,实现对飞行器姿态的控制。
模糊控制可以有效地应对系统的非线性特性,但是对规则库的设计和参数的选择需要较大的经验和技巧。
3. 神经网络控制4. 遗传算法控制遗传算法是一种模拟生物进化的优化算法,可以用来优化系统的控制参数。
在四旋翼飞行器中,可以利用遗传算法来寻找最优的姿态控制参数,从而实现对飞行器姿态的精确控制。
遗传算法能够全局寻优,但是需要大量的计算资源和较长的优化时间。
1. GPS定位控制GPS定位是一种全球定位系统,可以实现对飞行器位置的精确控制。
在四旋翼飞行器中,可以利用GPS定位进行位置控制,实现定点飞行或航线飞行。
通过GPS模块获取飞行器的位置信息,可以实现对飞行器位置的精确控制。
但是GPS在室内或密集城市地区信号可能不太可靠。
3. 惯性导航控制惯性导航是一种通过加速度计和陀螺仪获取飞行器运动信息,并通过积分计算得到飞行器位置信息的导航方法。
在四旋翼飞行器中,可以利用惯性导航进行位置控制,实现对飞行器位置的精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
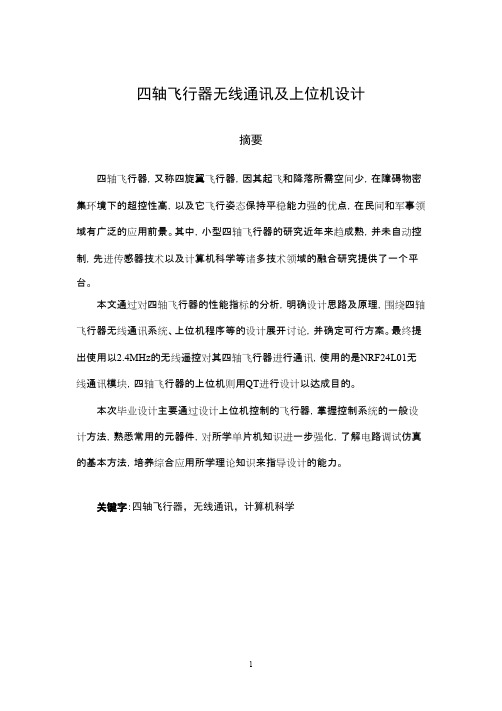
指 令编 产码 生器 器
发 射 电 路
接 收 电 路
译 码 器
处 理 器
执 行 机 构
图2.无线遥控系统结构图
控制指 令
遥控系统(装置)的分类:①按被控对象及其特性分类,有 固定式遥控和活动式遥控。②按被控对象的控制特性或控 制信号(指令)的特性可分两类:一是开关型控制——对被 控对象的状态进行单一的通断控制;另—类是连续型控制 :对被控对象的状态进行连续调整。
1.3 遥测和遥控的关系及开环、闭环控制系统 (1)遥控和遥测的关系:
自然光、人工光 源作发射器
接收方式与特点 应用场合
光电器件接收
家用电器、 工业控制等
声控 2~10m
热释 近距 电
20~20kHz 说话、脚步声、 敲击声等振动波 发射器
40kHz
热释电传感器产 生发送信号
声传感器压电陶 瓷片、驻极体话 筒接收转变电信 号
热释电红外接收 器
家用电器、 工业、报警 等
控制端
被控对象 监测系统
常用的监测系统:遥测、雷达和电视监控等。
(2)闭环控制系统:有完善的监测系统(设备)的遥控 系统。
(3)开环控制系统:无需监测设备的简单遥控系统(监 测常由控制者的眼睛实现)。
无线电遥控的特点 无线电遥控式使用无线电为载体来传送遥控命令的,具有较强 的辐射能力,能穿越墙壁和障碍物,遥控距离远等特点。 无线电遥控的缺点是,容易引起互相干扰。为避免互相干扰造 成误操作,也为避免其他众多的无线电发射装置所发射的无线 电波对遥控装置的干扰,在实际应用中,必须采用编码技术。
无线电遥控:就是指利用无线电信号对远方的各种机构进行控 制的技术。这些信号被远方的接收设备接收后,可以指令或驱 动其它各种相应的机械,去完成各种操作,如闭合电路、移动 手柄、开动电机,之后,再由这些机械进行需要的操作。所以 ,各个控制的信号在频率和延续的时间上都彼此不同,对于控 制船舶、飞机、导弹等海空行体的应用上极为广泛。
无线电遥控的频率
为了防止无线电波遥控装置发射的无线电频率对其他无线电设 备(如收音机、电视等)造成干扰,无线电管理委员会专门划 拨一些频率供业余无线电爱好者使用。常用无线电业余频率范 围27~38MHz、40~48.5MHz、72.55~74.5MHz、 150.05~167MHz等
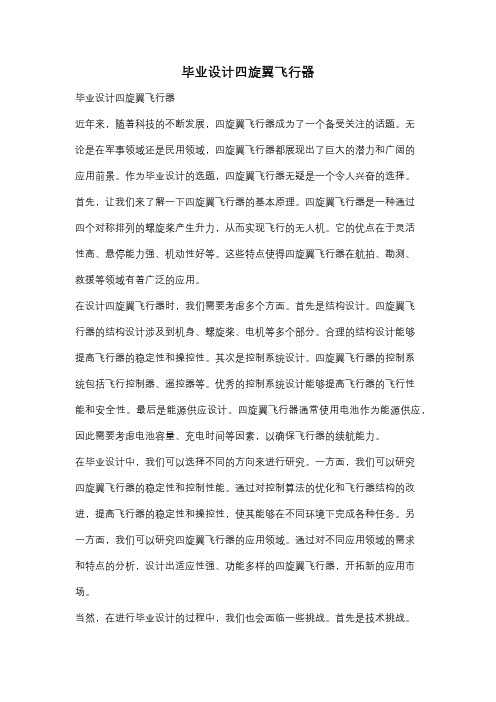
二、无线遥控的工作原理
信号放 大器
调制器
载波振 荡器
变频器
激励放 大
输出功 率放大
天线开 关
控制指 令
信号放 大器
解调器
混频放
大与滤 波
混频器
本地振 荡器
高频放 大
图3.无线控制系统基本组成
遥控指令产生器:有简单的电源控制开关,单通道发射器;复杂的如 频分多路(FDM)遥控设备,时分多路(DTM)遥控设备等。
一般用无线电信道传输控制信息(指 令),如遥控距离较近或被控对象在低 空飞行(如反坦克 导弹),也可用光通 信线路或有线电通信方法传输控制信息。
键盘 按键识别编码
无线发射 无线接收 信号识别 控制电路
图1.无线遥控工作过程图
1.1各种遥控方式比较
遥控 方式
光控
传输距离 发射频率 近距
发送方式与特点
家电、工控、 报警等
超声 10~15m 40kHz 波
超声波发射器、 超音频振荡器、 驱动电路传送 40kHz超音频信 号
超声接收器,放 探测、家电、
大、解码、锁存、 开关电路、
驱动等
调速、医疗
等
语言 音频 红外线 无线电 磁控
近距 2~3km 10~15m
2m~2000km 或更远 0.001m
四旋翼飞行器无线遥控技术
一、无线遥控技术的介绍 二、无线遥控工作原理 三、无线电遥控设备的分类 四、无线电遥控系统 五、遥控器关键部件及四旋翼飞行器启动方法 六、无线电遥控设备的常见调制方式 七、无线电遥控设备的常见解调方式 八、无线电遥控的设计开发 九、无线视频传输技术
一、无线遥控技术的介绍
遥控技术是对受控对象进行远距离控制 和监测的技术。它是利用自动控制技术, 通信技术和计算机技术而形成的一门综 合性技术。一般都是指对远距离的受控 对象的单一的或两种极限动作进行控制 的技术,在人们的生产生活中具有广泛 的应用空间。
完成遥控任务的整套设备称遥控系统。 遥控系统既可传送离散的控制信息(例 如开关的通断),也可传送连续的控制 信息(例如控制发动机油门大小)。
男70~200Hz 女、儿童
150~400Hz
特定人或任
意人发出的 声音信号
接收、合成、 家用电器、 识别、转换、 工业遥控等
驱动、执行 显示等
3.58MHz
专用集成电 路和振荡器 配合产生音 频信号
放大、识别、 家电、生活、 执行机构接 工业、农业、 收发送命令红外发 红外器件接 射器件传送 收后,把红 遥控命令、 外光转变为 具有方向性、 电信号 不能跨越墙 壁阻挡
生产、生活、
工业、农业、 医疗
27~38MHz 40~48.5MHz 150~167MHz
劝无方向性, 选择性好、 可以向四周 灵敏度高; 辐射,能穿 稳定可靠, 越墙壁和障 再生与超外 碍物,遥控 差接收方式 距离远
军事、国防、 工农业生产、 体育运动、 日常生活
同步旋转磁 霍尔元件接 工业控制等 铁作发射器 收
电信号:是指代表某种信息(如声音、图像等)或指令的电流或 电压,也称为原始信号或基带信号。
遥控指令:遥控系统中由控制端向被控端传送的指示被控对象工作或如 何工作的命令(信号) 。 遥控指令的特点:特征明显、相互间易于区分(电信号)。例如 用不同频率代表不同的指令,或用不同幅度、脉宽、相位及码组特征等 表尔各种指令,也可用声音、图像、文字、数据等作为遥控用的指令信 号。
遥控指令的输入方式:按键、开关、键盘,还有声音、光信号。
无线电遥控过程:遥控指令→载波(电磁波)→发射→空间传输 →接收→执行。
1.2 遥控装置(系统)及其分类
完成遥控任务的整套设备称为遥控系统或遥控装置。通常 、将控制距离远、设备较复杂的称为遥控系统;而将控制 距离较近、设备简单的称为遥控装置或遥控器。