YA系列机器人标准规格7轴
工业机器人十大品牌简介

生产效率和产品质量。
ABB工业机器人采用先进的算 法和软件技术,可以实现智能 化的生产管理和远程监控,提 高生产效率和设备利用率。
ABB工业机器人采用先进的机 电一体化技术,可以实现与生 产线的无缝对接,提高生产效 率和产品质量。
工业机器人十大 品牌简介
汇报人: 2023-11-30
目录
• 工业机器人概述 • 工业机器人十大品牌 • ABB集团产品特点 • KUKA集团产品特点 • Yaskawa集团产品特点 • Fanuc集团产品特点
01
工业机器人概述
定义与分类
01
工业机器人是一种能够通过编程 和自动控制来执行诸如作业或移 动任务的机器。
200kg的区间。
精度
Fanuc机器人的重复定位精度高, 通常在0.01mm以内,有利于进行 精细的作业。
速度
高速运转是Fanuc机器人的一个重 要特点,最高运动速度可达60m/s 。
Fanuc工业机器人的应用领域
汽车制造
Fanuc与全球各大汽车制造商合 作,为汽车制造过程提供自动化 解决方案,包括焊接、装配、搬
运等。
电子电器
电子电器行业对精密度和效率有 很高的要求,Fanuc的工业机器 人能够满足这些需求,如贴片、
装配、检测等。
金属加工
Fanuc的工业机器人可以用于金 属加工的各个环节,如切割、打
磨、焊接等。
Fanuc工业机器人的技术优势
稳定性
Fanuc的工业机器人在长时间高强度的工作环境 下,依然能保持稳定的性能。
04
KUKA集团产品特点
KUKA工业机器人型号与规格要点一KUKA工 Nhomakorabea机器人型号
松下机器人操作手册
安全开关按下过轻 [力度适中]
伺服电源打开 <可以打开>
安全开关按下力量过大 伺服电源关闭
[力度过大]
<不能打开>
※1 ※2
※3
伺服打开
2 打开 机器人运转 图标 3.选择坐标系
※2 ※3
按下 右转换键 后,可以使用 键切换坐标
关闭
打开
关节
切换
直角
切换
工具
切换
圆柱
用户
(需要使用扩张机能设定)
+
右转换键
<在示教模式下使用用户功能键>
※24
+ 保存
使用这些键 进行换页
F1 F2 F3 F4 F5
开始跟踪 检气・送丝 示教内容切换 追加次序指令 切替 *速度变换 焊接/空走 插补方式变换 坐标系变换 切替
上面的设定仅仅是假设,用户可以根据需要随意改变设定内容。
* 在示教以外的其他操作方式时,功能键的使用会随着操作方式的不同而不同。 如果要了解进一步的详细信息,请参考用户功能键使用说明。
向前微动
微动键
TP正面
液晶显示屏
向后微动
+加
-减
确认/登录键 窗口切换键
(背面) 右转换键
取消键
安全开关
TP背面
右转换键
左转换键
模式选择开关
用户功能键
中文名称 非常停止开关
启动开关 暂停开关 伺服启动开关 Jog 微动键 登录键(确认键) 窗口切换键 取消键 用户功能键 模式选择开关 运动功能键 右转换键 左转换键 3 点安全开关
ファンクションキーⅠ
4.运转 推荐坐标(直角坐标/运动)(工具坐标/角度)
1)各轴运动时坐标系的选择
直角
焊枪的运动
机器人第七轴设计资料

矩形滚轮导轨系统广泛应用在机器人第七轴中,包含如下四大组件:一:矩形滚轮导轨导轨上可直接加工出齿条,成为一体式齿条导轨:二:滚轮组合每个滚轮组合,安装有三个外球面滚轮轴承,分别在矩形导轨的3个工作面上滚动:滚轮组合,也可采购滚轮,自行加工和装配滚轮组合:滚轮组合加工装配说明。
三:齿轮组件齿轮组件,带有回差调节机构,方便调整齿轮和齿条之间的啮合间隙;详细说明,请参考文章:齿条传动专用齿轮组件四:齿轮齿条自动润滑装置实现齿轮齿条传动系统的自动润滑,延长机器人第七轴的使用寿命,降低故障率;详细说明,请参考文章:齿轮齿条自动润滑装置:要组成机器人第七轴,还需要如下机械部件:一:导轨安装基础可采用方钢上焊接钢条作为安装基础,钢条上铣出导轨安装基准:安装调试的时候,要确保两根方钢上的安装基准面的平行度:二:机器人安装底座采用高强度钢板,把滚轮组合,伺服电机和机器人的安装基准面和孔位加工出来:矩形滚轮导轨系统为标准产品,如下是和MHD矩形滚轮导轨配套使用的MHD座式滚轮组合:DIY简易式滚轮组合,可采用类似结构。
每个小车平台上安装有4套座式滚轮组,装配时,先把每套滚轮组合的底部的那个滚轮卸除,然后把小车平台放到导轨上,再把每套滚轮组合的底部的那个滚轮安装上去:简易式座式滚轮组合,可不采用MHD滚轮组合这种形式的滚轮安装底座,MHD滚轮组合安装底座具有复杂外表面,需要模具来生产;我们可以根据载荷的大小,从市面上直接采购长方体形状的铝合金块或球墨铸铁块,进行铣削和钻孔加工就可以了,这样可显著降低成本:一:中滚轮的中心轴线和上下滚轮的中心轴线,是错开一定距离的,这样就避免了滚轮安装孔之间的干涉:二:上滚轮和中滚轮的安装固定方式为盲孔方式,也就是说需要在安装底座上加工出螺纹孔来,螺栓穿过滚轮的中心孔,拧紧在底座的螺纹孔里:三:下滚轮的安装方式为通孔方式,在安装底座上加工出通孔来,螺栓穿过这个通孔,拧紧在滚轮的中心螺纹孔里:综上所述,安装底座进行的加工主要是:一:铣平面。
YAMAHA机器人控制器

参数设定简单
机器人控制器是雅马哈机器人的专用设计。对机器人动作所需的增益等伺服参数已预设最佳值。无需繁琐的设定和控制方面的知识、 经验,立即可以动作。
加减速度设定简单
加减速度是左右机械寿命的重要系数。设定过高的加速度会缩短机械寿命,过低则不能发挥马达效率,延长产距时间。雅马哈机器人 控制器按机型、负载重量等细致规定了加减速度。只需设定搬运重量参数,即可自动设定考虑了机械寿命和马达功率的最佳加减速度。 这是只有对机器人无所不知的雅马哈才有的贴心设计。 而且水平多关节机器人还配置了区域控制功能,可以根据机械手臂状态,并考虑惯性变化因素,发挥最大性能。
在 3 号点写入当前位置。 定义 “END” 名称的标签。 程序暂停。
单轴机器人控制器使用简易的、具备 I/O 输出和条件分歧等必要功能的雅马哈 SRC 语言※。多轴控制器 RCX 系列使用雅马哈 BASIC 语言,其可进行
各种计算和自由变量设定、各种条件分歧等更高功能的编程。它们都是以 BASIC 为标准的简单易用的机器人语言。可以应对从简单动作到专家用户的
031
产品系列 / 选型指南
按控制方式的分类表
ő I/O ࢰٞځཤ
TRANSERVO Ԟॣମ،
FLIP-X
T4/T5/YMS
ဆဲ๔ܵମ، DŽ24Vࠊ30WDž
ᅂ๔ܵମ، DŽ30ࠥ600WDž
TS-S
TS-X
PHASER ္ମ،
TS-P
TS-S/ TS-X/TS-P
P.354
1ቺ
ő ଷ֤ળ
2ቺ 3ɺ4 ቺ 5ࠥ8 ቺ
7. 丰富的支持软件 :TS-Manager
新开发了 TS 系列用的低价格、高功能支持软件“TS-Manager”。通过它可 执行点数据的设定、编辑、备份、示教等所有操作。还配备了当前值、速度、 载荷比、电流值、电压值等的实时跟踪功能。
ABB最新中文版冲压7轴机器人现场操作手册

* StampWare ABB* * 2011 ABB Group1.1 (3)1.2 (4)1.2.1 (4)1.2.2 I/O (5)1.2.3 “swArmBoard” (6)1.2.4 “swPLCBoard” (6)1.3 (7)1.3.1 (7)1.3.2 (7)1.3.3 (8)1.3.4 (9)1.3.5 (10)1.4 (10)1.5 (10)1.5.1 (11)1.5.2 Home Access (11)1.6 (12)1.6.1 (13)1.6.2 (14)1.7 (14)1.7.1 1~6 (15)1.8 (16)1.8.1 (16)1.8.2 (16)1.8.3 I/O (16)1.8.4 (16)1.8.5 ProgKey (17)1.8.6 (18)1.9 (18)1.10C ELL HMI (19)1.10.1 (19)1.10.2 “ ” (20)1.10.3 “ ” (22)1.10.4 “ ” (24)1.10.5 “ ” (25)1.10.5a Interpress“ ” (25)1.10.5b “ ” (26)1.10.5c “ ” (28)1.11S TAMP W ARE WIZARD (29)1.11.1 (29)1.11.2 .......................................................................................................... 30 1.11.3 .......................................................................................................... 31 1.11.4 .......................................................................................................... 32 1.11.5.a “InterPress ” ................................................................. 34 1.11.5.b ...................................................................... 37 1.11.6 ............................................................................................... 40 1.11.7 “ATC” ........................................................................................................ 44 1.12 ........................................................................................................................ 45 1.12.1 “ ” .................................................................................... 45 1.12.2 “ ” ...................................................................... 46 1.12.3 “ ” .......................................................................... 46 1.13 ................................................................................................... 47 1.13.1 ............................................................................ 48 1.12.1 “ ” (48)1.1FlexPendant1.21.2.1DI – DO –GI – 8421 GO - 8421 AI – AO –“diPartSensorC1 1 ”0” ”1” diPartSensorC2 1 ”0” ”1” doBlowC1 1doBlowC2 2doVacuumC1 1doVacuumC2 21.2.2 I/OI/O1.2.3 “swArmBoard”” ”doAuxValve1On / “0 /“1 /1.2.4 “swPLCBoard”PLC 128 128 ” ”1.31.3.1ROB-1 1~6 ROB-1 M7 7 M71.3.21-34-6Linear TCPReorient TCP “M7”1.3.3World ( )BaseTool6Work ObjectZ X Y1.3.4”,1.3.51.41.51.5.1”PP Main” ” Home ”PP Main”1.5.2 Home AccessHomeAccessHome Access WIZARD1 “PP ”2 “Access 247 UserMove\J pHome v500 fine tJoker3 Home4 251 UserMove\J pAccess v500 fine tJoker Access1.6/ (PC U )1.6.1”“ABC…”“/HD0a/ Drive U “… “/bd01.6.2”“… U1.71.7.1 1~61~61 “ROB-12345 ”1.81.8.11.8.21.8.3 I/OI/O / I/O I/O4Key1 / 1Key2 / 2Key3 / 1Key4 / 11.8.61.912 “swCognexData ”3“hd0a/STAMPWARE_5.10.0320/RapidLib/” ”1.10 Cell HMIHMI Stampware1.10.1Cell HMIScreen Loader// ;/ .1.10.2 “ ”1 2345678/781.10.3 ”1 2345673Pick4 5671.10.4 “ ”//1231.10.5 ”12341.10.5a Interpress ”2 c 2 b2 d3 c3 b3 d 2 a 3 a1Description Information3.c3.d1.10.5b ”1234545 / / ”1.10.5c ”1234WL Home ULWL Home UL1.11 StampWare WIZARD1.11.1StampWare Wizard .“ABB “StampWare WIZARD”123451.11.2TCPX Y Z1300 0 300KG 100600 0 2003:1.11.3121 2R10R14R15 12:”3:1.11.4“...“...1 2436571.11.5.a “InterPressAction Info“InterPress1.Mass of PartMass KG{cogx, cogy, cogz} TCP {0,0,100}2.Drop Anticipationms {100 100 100 100} 100~200 3.Vacuum Chanel/ TRUE TRUE FALSE FALSE4.Enables scrap blow off( )TURE5.Load Confimation Dev2( )2 6.Load Authorization Dev1( )2 7.Enables quality inspection( )TURE8.Enablessynch- FALSE -R-P( - )TURE - TURE9.EnablessynchR-R( - )- FALSE - TURE - TURE10.Valves 1 2 in robot armDRESSING 1 2 11.Valves 1 3 in press 1 2 1 3Valves 1~3 3 PLCPress1~2{1}ActValveIn : 1 2ActValveInPoint: WU/WL 1 P/D 2OU/OL 3DesactValveIn : 1 2DesactValveInPoint: WU/WL 1 P/D2 OU/OL 31.11.5.bAction Info“InterPress1. Control Double TUREBlank2Vacuum Chanel Destacker T1/T2/TRUE TRUE FALSE FALSE T1 T23Z Value (ToolX) Last Blank T1/T2( 1/2 Z )1/2 Z ( ) 1 Z 1/24OffSet Start Search from BeforePick( )BP5Before pick blanks speed( )50300mm/s“v_tcp6Before pick blanks speed( )50300mm/s“v_tcp7 Number ofstracks() “11.11.6No1.2. HomeHome WU OU WLOLWU WaitUnload / /BP BeforePick PickWUP PickAP AfterPick PickOU OutUnLoad / /WL WaitLoad /BD BeforeDrop DropWL2 BeforePick BP Pick Z 50~200mm3 AfterPick Pick Z 50~200mm4 Drop9 WaitUnload BeforePick AfterDrop WaitUnload WU10 OutLoad WU AfterDrop OutLoad OL4.MoveInstructionSpeedZoneMove JMove L TPCv0 v7000z0 z200 Fine z0InterpressWU MoveJ V3000~v7000 z10~z200BP MoveJ V3000~v7000 z10~z200P MoveL/ MoveJ V1000~v7000 z0~z1AP MoveL/ MoveJ V100~v7000 Z1~z200OU MoveJ V3000~v7000 z10~z200WL MoveJ V3000~v7000 z10~z200BD MoveJ V3000~v7000 z10~z100D MoveL/ MoveJ V1000~v7000 z0~z1AD MoveJ V3000~v7000 z10~z200OL MoveJ V3000~v7000 z10~z200MoveL/ MoveJ V100~v7000 Z1~z200“ “MoveJ ” “v7000”, “z200BP MoveJ V3000~v7000 z10~z50P MoveL/ MoveJ V3000~v7000 z0~z1AP MoveL V3000~v7000 z1~z10”1”2”””//“doAuxValve1ON 0 11.12/1.12.1rdiUnloadAuth1 1rdiUnloadAuth1=1rdiUnloadAuth1=1WU10 201.12.2OU OU“Load Authorization Dev1 Phase1 100%1.12.3OL OL“Load Conformation Dev2 Phase1 100%AD 401.13Stampware /1.13.1“Press Stamp Synchronization 100%TURE “WSP ”, WU OL1.12.1“Stamp R-R Synchronization 100%Geely Beilun BTURE “WSR ”, OU WL。
机器人第七轴
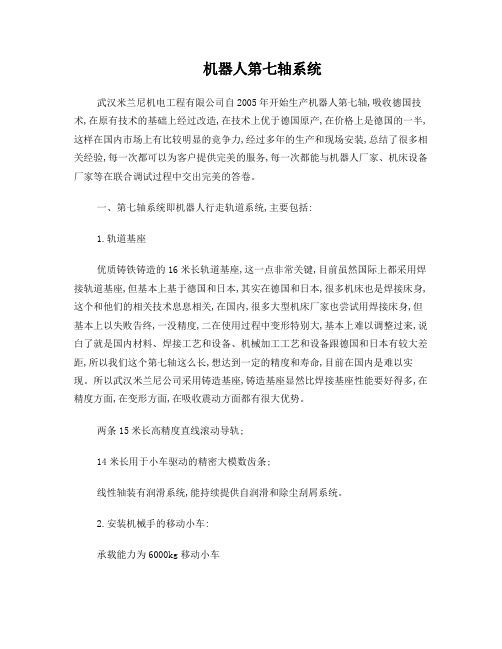
机器人第七轴系统武汉米兰尼机电工程有限公司自2005年开始生产机器人第七轴,吸收德国技术,在原有技术的基础上经过改造,在技术上优于德国原产,在价格上是德国的一半,这样在国内市场上有比较明显的竞争力,经过多年的生产和现场安装,总结了很多相关经验,每一次都可以为客户提供完美的服务,每一次都能与机器人厂家、机床设备厂家等在联合调试过程中交出完美的答卷。
一、第七轴系统即机器人行走轨道系统,主要包括:1.轨道基座优质铸铁铸造的16米长轨道基座,这一点非常关键,目前虽然国际上都采用焊接轨道基座,但基本上基于德国和日本,其实在德国和日本,很多机床也是焊接床身,这个和他们的相关技术息息相关,在国内,很多大型机床厂家也尝试用焊接床身,但基本上以失败告终,一没精度,二在使用过程中变形特别大,基本上难以调整过来,说白了就是国内材料、焊接工艺和设备、机械加工工艺和设备跟德国和日本有较大差距,所以我们这个第七轴这么长,想达到一定的精度和寿命,目前在国内是难以实现。
所以武汉米兰尼公司采用铸造基座,铸造基座显然比焊接基座性能要好得多,在精度方面,在变形方面,在吸收震动方面都有很大优势。
两条15米长高精度直线滚动导轨;14米长用于小车驱动的精密大模数齿条;线性轴装有润滑系统,能持续提供自润滑和除尘刮屑系统。
2.安装机械手的移动小车:承载能力为6000kg移动小车移动小车与机械手的连接尺寸符合“机器人”公司技术要求及通过“机器人”公司认可。
日本FANUC生产伺服电机作为主驱动;高分辨率编码器;伺服电机通过行星变速器驱动齿轮齿条。
3.控制系统FANUC 0iT控制系统:主控制柜包括:主开关以及熔断器、马达过载保护以及低电压保护、电源稳压以及变压装置、具有操作面板及显示屏;日本FANUC伺服控制单元;PLC可编程逻辑控制器及满足用户要求的软件;强电柜及弱点柜及操作面板。
4.安全、防护装置:软件限位;组合行程开关限位;轨道两端装有机械式停车器。
七轴工业机器人与六轴相比有什么优势?

七轴工业机器人与六轴相比有什么优势?近年来,跨国机器人巨头们纷纷推出七轴工业机器人,以抢占高端新市场,这引发了我们对于七轴工业机器人的深入思考,它具有哪些独特的技术优势,存在哪些研发难点,近年来国际上发布了哪些工业七轴机器人产品,我国七轴工业机器人的研发及产业化又进入了哪一阶段?工业机器人到底应该有几个轴?目前,工业机器人已经被广泛应用于各行各业,但我们也发现,工业机器人不仅形状各异,其轴数也各不相同。
所谓工业机器人的轴,可以用专业的名词自由度来解释,如果机器人具有三个自由度,那么它可以沿x,y,z轴自由的运动,但是它却不能倾斜或者转动。
当机器人的轴数增加,对机器人而言,就是更高的灵活性。
那么工业机器人应该有几个轴才合理呢?三轴机器人也被称为直角坐标或者笛卡尔机器人,它的三个轴可以允许机器人沿三个轴的方向进行运动,这种机器人一般被用于简单的搬运工作之中。
四轴机器人,可以沿着x,y,z轴进行转动,与三轴机器人不同的是,它具有一个独立运动的第四轴,一般来说SCARA机器人就可以被认为是四轴机器人。
五轴是许多工业机器人的配置,这些机器人可以通过x,y,z三个空间周进行转动,同时可以依靠基座上的轴实现转身的动作,以及手部可以灵活转动的轴,增加了其灵活性。
六轴机器人可以穿过x,y,z轴,同时每个轴可以独立转动,与五轴机器人的最大区别就是,多了一个可以自由转动的轴。
六轴机器人的代表就是优傲机器人,通过机器人身上的蓝色盖子,你可以很清楚的计算出机器人的轴数。
七轴机器人,又称为冗余机器人,相比六轴机器人额外的轴允许机器人躲避某些特定的目标,便于末端执行器到达特定的位置,可以更加灵活的适应某些特殊工作环境。
随着轴数的增加,机器人的灵活性也随之增长。
但是,在目前的工业应用中,用得最多的是三轴、。
KUKA工业机器人培训资料ModelZ 机器人七轴培训 V1.1
安装基准面
底座
齿条安装、更换
相反齿条
六、齿条安装
安装步骤:
⒈设备第一次安装时,齿条按顺序放置于基 准面上。
[注意]:a.安装或更换前,首先检查基准面, 确保其表面无杂质; b.固定齿条时应逐渐逐个紧固锁紧 螺栓。
⒉当需要更换齿条时要求:利用相反齿条固 定连接结构逐个操作(即卸下一根安装 一根)
齿条
七、七轴安装
安装步骤: ⒈ 首先,将伺服电机和减速机连接好。 ⒉ 其次,将齿轮与减速机(间隙配合H8/h7)连接好。 ⒊ 将减速机连接于机座上,机座固定螺栓稍施加点预紧力,将塞尺(0.15mm)置于齿条上,
在Y向上整体调整齿轮齿条的中心距,调整好后抽出塞尺锁紧机座上的固定螺栓即可。 ⒋ 拆卸更换齿轮时,将减速机与齿轮整体拆下,均匀轻敲齿轮周边直至卸下更换。
4.2齿轮、齿条润滑保养
齿条图号:78-38D_412069_____05~(厂商:大连奥托) 齿轮图号:78-38D_412069_____25~(厂商:大连奥托) 维护原则:
①定期(1个月)进行齿轮、齿条润滑的检查; ②当发现七轴的直线往复重复精度>0.1mm时,可以请专业人员对齿轮、齿条进 行检测分析,如果损坏即刻更换。
Y
塞尺
八、Z向高度检测装置
功能:用于设备使用过程中阶段性监测(主要是目测) 安装步骤: 安装参考基准:地面Z向检测基准面,安装应参考底座位置; 安装位置:在近机器人工作端根据设备长度增加2处或3处; 检测:
空载时,两侧导轨测量一组比较数据; 满载时,同上。 如果偏差值>0.2mm即可维修调整。
Z向高度检测步骤: ① 首先,进行维护前操作安全检查,确保安全后操作人员方可进
齿轮 加油器油杯 加油器油杯
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
YA-R5FS E R I E S新一代机器人YA-R6FYA-U20FYAMAHA垂器人更节省人6轴机器人S轴:使机身水平旋转L轴:使机身前后摇动U轴:使手臂上下摇动R轴:使手臂旋转B轴:使手臂前端上下摇动T轴:使手臂前端旋转7轴机器人S轴:使机身水平旋转L轴:使机身前后摇动E轴:扭转手臂的动作U轴:使手臂上下摇动R轴:使手臂旋转B轴:使手臂前端上下摇动T轴:使手臂前端旋转YA-R6F※超过1kg时动作范围不同。
请根据可搬运重量在适当的动作范围内使用。
YA-U5FYA-U10FYA-U20FYA系列丰富的产品阵容U轴R轴L轴E轴T轴B轴S轴手臂机身U轴S轴L轴T轴B轴手臂机身实现高速运转时的周期时间缩短采用高速、低惯性AC伺服电机,设计时充分考虑到机械臂的轻型化,同时采用最新的控制技术,实现了同等级别的产品中最高水平的动作速度。
在供应、组装、检查、装箱乃至码垛作业等各种用途中,显著缩短了周期时间,提高了生产效率。
同时适用于腕部负载高的工件拥有同等级别产品中最高水平的腕部容许惯性力矩,可充分应对腕部负载高的作业及多个工件同时操作。
不改变法兰位置的肘部动作第7轴的旋转可使机械臂作出像人类手臂一样柔软、灵活的动作,实现绕转动作及伏卧姿势。
因此,可进入人无法进入的狭窄场所作业,并可在作业时避开干扰物体,从而提高布局设计的自由度,缩短周期时间,并节省空间。
支持绕转动作及伏卧姿势7轴●最适合小型台式装置及教育用途。
●可轻松进行设备组装、移动、安装的超轻机器人。
●全部轴均使用80W以下的电机。
●同时适用于组合移动轴等外部附加轴规格。
Y A-RJ(注)本表采用SI单位制记载。
※请另行咨询本公司。
4Y A-R3F●可安装在B5尺寸的空间中(底板尺寸:240×170mm),最适合AGV搭载、实验用途、教育用途等。
●全部轴均搭载80W以下的电机。
●U臂内置空气软管φ4×4个、装备用电缆(0.2mm2×10根)。
构建系统时的配线及配管规整有序。
●支持落地式、壁挂式、吊顶式安装。
※壁挂式、吊顶式安装请咨询本公司。
※请另行咨询本公司。
●同时适用于组合移动轴等外部附加轴规格。
5S E R I E SY A-R5F/Y A-R5LF(注)本表采用SI单位制记载。
●通过提高控制器运行速度及机械臂振动抑制功能,可以减轻启动停止时的残余振动,缩短周期时间,实现同等级别产品中的最高速度。
●同等级别产品中最大的伸展尺寸 (YA-R5F为706mm、YA-R5LF为895mm)。
●同时适用于组合移动轴等外部附加轴规格。
※请另行咨询本公司。
●支持落地式、壁挂式、吊顶式安装。
6※壁挂式、吊顶式安装请咨询本公司。
Y A-R6F●最大伸展R1422mm●最大可搬运重量6kg6轴垂直多关节●通过提高控制器运行速度及机械臂振动抑制功能,可以减轻启动停止时的残余振动,缩短周期时间,实现同等级别产品中的最高速度。
●同等级别产品中最大的伸展尺寸 (1422mm)。
提高了肘节部负载能力。
●同时适用于组合移动轴等外部附加轴规格。
※请另行咨询本公司。
●支持落地式、壁挂式、吊顶式安装。
7S E R I E S※壁挂式、吊顶式安装请咨询本公司。
Y A-U5FYA-U5F是具有7轴自由度及可搬运重量为5kg的机器人。
最适合安装在狭窄场所以及要求高定位精度的小型物体的操作。
●7轴结构的机械臂可实现如同人类手臂的高自由度动作。
●手腕部使用新开发的小型驱动器,使机械臂更加细长,大幅度减少了与工件的干扰情况。
●通过机械臂关节机构的巧妙设计避免了因机器人小型化带来的可动范围缩小问题,实现了动作领域的最大化。
●主体质量仅30kg,可自由采用落地式、吊顶式、壁挂式等安装方式。
■基本规格※壁挂式、吊顶式安装请咨询本公司。
●灵活应用机械臂内置的装备电缆,可以自由规划离线配置而不必顾虑设备间的互相干扰问题。
(装备线规格 : 空气2系统、装备线8芯)※1:因用途、动作模式而异。
(注)本表采用SI单位制记载。
(注) 可另行生产机械手用外部轴规格。
请向本公司咨询。
8Y A-U10FYA-U10F是具有7轴自由度及可搬运重量为10kg的机器人,尺寸比YA-U20F更小。
最适合狭窄场所的小型物体操作等用途。
●7轴结构的机械臂可实现如同人类手臂的高自由度动作。
●动作自由度高,在人无法进入的狭窄场所也能灵活动作。
●待机时机械臂可立体折叠变小,不会造成干扰。
※壁挂式、吊顶式安装请咨询本公司。
●灵活应用机械臂内置的装备电缆,可以自由规划离线配置而不必顾虑设备间的互相干扰问题。
(装备线规格 : 空气2系统、装备线12芯)●可自由采用落地式、吊顶式、壁挂式等安装方式。
●最适合小型物体的操作。
(注) 可另行生产机械手用外部轴规格。
请向本公司咨询。
9S E R I E SY A-U20FYA-U20F具有独特的机械臂形状和7轴自由度,实现了以往不可能的高自由度动作,且更加节约时间。
可操作20kg重量的物体。
●7轴结构的机械臂可实现如同人类手臂那样的高自由度动作。
●动作自由度高,在人无法进入的狭窄场所也能灵活动作。
●待机时机械臂可立体折叠变小,不会造成干扰。
●可自由采用落地式、吊顶式、壁挂式等安装方式。
※壁挂式、吊顶式安装请咨询本公司。
●可应对20kg重的物体的组装、搬运。
●灵活应用机械臂内置的装备电缆,可以自由规划离线配置而不必在意干涉。
(装备线规格 : 空气2系统、装备线16芯)(注) 可另行生产机械手用外部轴规格。
请向本公司咨询。
10为更好匹配操作、组装用途而对功能及性能全面优化的小型控制器。
同时适用于可搬运重量为20kg以下的机器人。
●19英寸的货架尺寸,可安装在传送带下。
●提供便于工件搬运与传送带同步的的专用指令。
Y AC100YAC100提供客户可根据用途构建最佳应用软件的环境和功能。
●机器人控制用定制软件开发功能 ·可将用户以C语言开发的机器人控制软件安装到控制器中●可将YAC100作为服务器、用主电脑直接控制YAC100的功能 ·可用主电脑控制机器人●手持编程器应用软件开发功能 ·可将用户开发的WindowsCE应用软件导入手持编程器·············手持编程器外部轴(最多2轴)输入输出模块(28点、NPN或PNP规格)计数器模块(2ch)模拟输入模块(8ch)模拟输出模块(4ch)主要现场总线基板DeviceNet(主站/从站)、CC-Link(从站)、PROFIBUS(从站)、EtherNet/IP(从站、I/O通信)传送带同步功能TCP功能相对任务功能协调控制功能伺服浮动功能节能功能(限制伺服断电频度)·····视觉功能外部基准点控制功能独立控制功能搜索功能自动备份功能YA系列用控制器最适合操作、组装用途开放控制器※: 支持ControlLogix 1756-L61及CompactLogix 1756-L35E※支持选配件※支持选配件※支持选配件(注)订货时,请订购选配的手持编程器或仿真连接器。
手持编程器请务必预备1台以备维护使用。
(1台手持编程器可维护多台控制器YAC100。
)仿真连接器不连接手持编程器以及使用软件编程器时,必须连接仿真连接器,因此请务必准备一个。
11S E R I E SYA-U5FYA-U10F710kg1203mm720mm±0.1mm-180°~ +180°-110°~ +110°-170°~ +170°-135°~ +135°-180°~ +180°-110°~ +110°-180°~ +180°170°/s170°/s170°/s170°/s200°/s200°/s400°/s31.4N·m31.4N·m19.6N·m1.0kg·m1.0kg·m0.4kg·m60kg1.0kVA75kg1007mm559mm±0.06mm-180°~ +180°-110°~ +110°-170°~ +170°-90° ~ +115°-180°~ +180°-110°~ +110°-180°~ +180°200°/s200°/s200°/s200°/s200°/s230°/s350°/s14.7N·m14.7N·m7.35N·m0.45kg·m0.45kg·m0.11kg·m30kg1.0kVAYA-U20F720kg1498mm910mm±0.1mm-180°~ +180°-110°~ +110°-170°~ +170°-130°~ +130°-180°~ +180°-110°~ +110°-180°~ +180°130°/s130°/s170°/s170°/s200°/s200°/s400°/s58.8N·m58.8N·m29.4N·m4.0kg·m4.0kg·m2.0kg·m120kg1.5kVAYA-R3FYA-R5FYA-R5LFYA-R6F66kg2486mm1422mm±0.08mm-170°~ +170°-90°~ +155°--175°~ +250°-180°~ +180°-45°~ +225°-360°~ +360°220°/s200°/s-220°/s410°/s410°/s610°/s11.8N·m9.8N·m5.9N·m0.27kg·m0.27kg·m0.06kg·m130kg1.0kVA7轴组装·配膳雅马哈发动机株式会社 。