重型拖拉机电液提升器多路换向阀仿真与试验
拖拉机电-液悬挂系统PID控制仿真研究
电流和控制 电压 u 的比例系数 ) 。 衔 铁组 件动 力学 方程 :
mXs D s+ KJ = FI + X X () 2 式 中 : 为衔 铁组 件 的质 量 ; 为 阻尼 系数 ; 为 m D K
与传统 的机 一液 控 制液压 悬 挂系统 相 比 , 于 基 电磁 阀和 电子控 制单 元 ( C 的 电 一液 控 制 悬 挂 E U)
的 电磁 铁断 电 , 液压泵 输 出 的油液 经过 电磁 溢流 阀 流 回油箱 , 液压 泵处 于卸 荷 状 态 , 农 具 自重作 用 在
系统具有响应速度快 、 控制精度高和操作舒适灵便 等优 点 , 是拖 拉 机悬 挂 系统 的发 展 方 向 , 起 了国 引
内外相 关企 业 和研究 人 员的高 度 关注 , 并进行 了大 量 的研 究 , 取得 了有价 值 的研 究 成 果 , 进 了 电 一 促 液 控制 在拖拉 机 悬 挂 系统 中 的应 用 1 』 目前 围 。 绕 电 一液控 制悬 挂 系 统 的 研究 大 多集 中在 电子 控 制单 元 硬件 即 控 制 芯 片 的研 发 上 。例 如 ,9 5年 19
・
现代设计与先进制造技术 ・
朱思洪 张
超
拖拉机电 一 液悬挂 系统 PD控制仿真研究 4 I 9
拖 拉 机 电 一液 悬 挂 系统 P D控 制 仿 真研 究 I
朱 思洪 , 张 超
( 京农业 大 学 工学 院 , 南 江苏 南 京
203) 10 1
摘要 : 介绍了拖拉机 电一液悬挂耕深调节 系统的结构及工作原理 , 阐述 了建立 系统数学模型的方
制悬 挂 系 统 控 制 策 略 的 研 究 虽 然 也 有 报 道 但 8, 研究 还很 不深 入 。本 文 以 典 型 的 电 一液 控 制 悬 挂 系统 为例 , 将结 构简 单 、 棒性 好 的 PD 控制 用 于 鲁 I 电 一液悬挂 系统 中 , 立 系 统 的控 制模 型 , 利 用 建 并 Mal tb仿 真工 具 进 行 仿 真 , 获 得 最 佳 的控 制 参 a 以 数 和较 高 的控 制精度 。
拖拉机电液提升机构设计与仿真
手 动 提 升 机 构 的基 础 上 进 行 改 造 的 .操 控 者 通 过 控
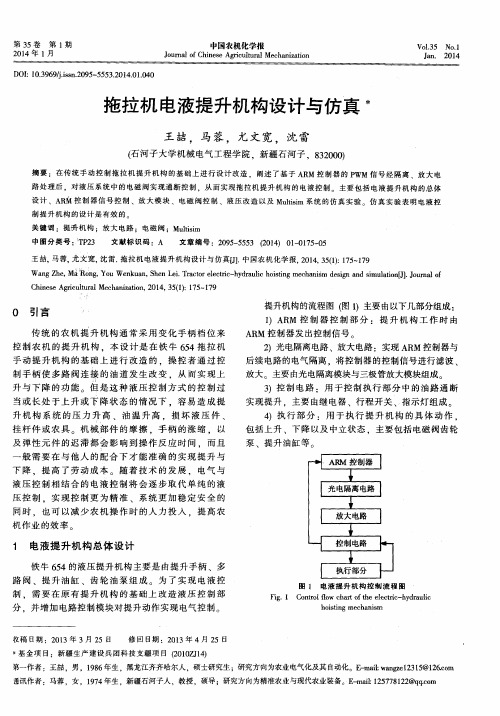
提升 机构的流程图 ( 图1 )主要 由以下几部分组成 : 1 )A R M 控 制 器 控 制 部 分 :提 升 机 构 工 作 时 由 A R M 控 制器 发 出控制信 号 2 )光电隔离电路 、放大 电路 :实现 A RM控制器 与 后续 电路 的 电气 隔离 ,将 控制器 的 控制信 号进行 滤波 、
。
仿 真 实 验 表 明 电液 控
王抬, 马蓉, 尤文 宽, 沈雷. 拖拉机电液提升机构设计与仿真[ J 1 . 中国农机化学报, 2 0 1 4 , 3 5 ( 1 ) : 1 7 5 1 7 9
Wa n g Z h e , Ma R 0 n g , Y o u We n k u a n , S h e n L e i . T r a c t o r e l e c t i r c — h y d r a u l i c h o i s t i n g m e c h a n i s m d e s i g n a n d s i m u l a t i o n [ J ] . J o u r n a l f o
1 电 液 提 升 机 构 总体 设 计
铁牛 6 5 4的液压 提升 机构 主 要是 由提升 手 柄 、多
路 阀 、提 升 油 缸 、齿 轮 油 泵 组 成 。为 了 实 现 电液 控 制 .需 要 在 原 有 提 升 机 构 的基 础 上 改 造 液压 控 制 部
图 1 电液 提 升 机 构 控 制 流 程 图
F i g . 1 C o n t r o l l f o w c h a r t f o t h e e l e c t i r c - h y d r a u l i c
电液提升器多路换向阀流道压力损失仿真分析

Feb. 2021Vol. 49 No. 32021年2月第 49 卷 第 3 期机床与液压MACHINE TOOL & HYDRAULICSDOI : 10.3969/j. issn. 1001 — 3881. 2021. 03. 030本文引用格式:赵建军•电液提升器多路换向阀流道压力损失仿真分析[J].机床与液压,2021,49(3):150-154.ZHAO Jianjun.Simulation and analysis on pressure loss of multi-directional control valve of electro-hydraulic hitch[ J] . Machine Tool & Hydraulics , 2021,49(3) : 150-154.电液提升器多路换向阀流道压力损失仿真分析赵建军W(1.中国石化石油工程技术研究院,北京100101;2.页岩油气富集机理与有效开发国家重点实验室,北京100101)摘要:大功率拖拉机电液提升器多路换向阀内部流道的几何结构会直接影响流道压力损失大小,较大的压力损失会严重影响整个多路换向阀的液压输出功率,从而制约着拖拉机电液提升器整体的动态性能。
为提高加工效率、降低局部压力 损失,采用机械加工和铸造相结合的方法设计了一种新的多路换向阀内部流道。
在对多路换向阀流道压力损失进行理论分析的基础上,运用ANSYS 有限元流场分析模块,对油液在多路换向阀不同流道内的流动状态和压力损失进行了三维数值模拟与分析。
仿真结果表明:该多路换向阀的流道压力损失满足设计要求,能够用于大功率拖拉机电液提升器。
关键词: 多路换向阀; 流道; 压力损失; 数值模拟中图分类号:S232. 3Simulation and Analysis on Pressure Loss of Multi-directionalControl Valve of Electro -hydraulic HitchZHAO Jianjun 1,2(1. SINOPEC Research Institute of Petroleum Engineering , Beijing 100101, China ; 2. State Key Laboratoryof Shale Oil and Gas Enrichment Mechanism and Effective Development , Beijing 100101, China)Abstract : The flow channel pressure loss is directly determined by the geometric construction of multi-directional valve in highpower tractor electro-hydraulic hitch. Large pressure loss will seriously affect the entire multi-directional valve hydraulic output power ,thus the overall dynamic performance of the electro-hydraulic hitch in tractor is restricted. In order to improve machining efficiency andreduce local pressure loss , a new internal flow channel of multi-directional valve was designed by combining machining and casting method. Based on the theoretical analysis of the pressure loss in the flow channel of the multi-directional valve , the three-dimensionalnumerical simulation and analysis on the flow state and pressure loss of the oil in the different flow channel of the multi-directional valve were carried out by using ANSYS finite element flow field analysis module. The simulation results show that the pressure loss of themulti-directional valve meets the design requirements and can be used in the electro-hydraulic hitch of the high power tractor.Keywords : Multi-directional valve ; Flow channel ; Pressure loss ; Numerical simulation0前言大功率拖拉机电液提升器多路换向阀是一种能控制多个液压执行机构的换向阀组合,它是以2个以上 换向阀为主体,集换向阀、单向阀、安全阀、补油 阀、 分流阀、 制动阀等于一体的多功能集成阀° 多路换向阀具有方向和流量控制2种功能,并且具有结构 紧凑、管路简单、操作方便等优点°由于其动力充足,大功率拖拉机采用多路换向阀进行一次作业时可 实现犁、耕、播、施肥等多种复合作业,减少拖拉机对土壤的压实,提高抢时播种的功效,从而提高土壤的利用率°因此,多路换向阀的工作性能成为影响拖拉机作业质量的重要因素[1]°随着拖拉机大型化水平 的不断提高,开发可靠性强、可维护性强、操纵性好 的多路换向阀,对满足国内市场的需求具有重要的现实意义°阀体是多路换向阀的主要零件,其内部流道的压 力损失会直接影响整个多路换向阀的性能°流体在流道内的分布规律决定流体能量损失的大小,为了减少收稿日期:2019-09-25基金项目:国家科技重大专项(2016ZX05033-004);中国石化科技部攻关项目(P18001-8);国家自然科学基金项目( U19B6003)作者简介:赵建军(1986—),男,工学博士,工程师,从事钻井提速工具研发和流体力学仿真技术研究工作。
多通道机电液控制系统综合实验

六自由度液压伺服平台综合实验一、实验目的1 、掌握电液位置伺服控制系统的工作原理及工作过程;2 、了解六自由度液压伺服平台动作原理及动作过程;3、掌握六自由度液压伺服平台的结构解算方法及其软件实现过程。
二、实验设备1 、相应六自由度平台一套;2 、装有相应软件的工控机一台。
三、试验原理:六自由度运动平台,因其具有极为广阔的应用前景,近几年,引起了众多国内与国外科研院校广泛的研究兴趣。
其主要结构是由六根运动缸,上、下各六只万向铰和上、下两个平台组成,下平台固定在基础上,借助六只运动缸的伸缩运动来完成上平台在空间六个自由度的运动,从而模拟出各种空间运动姿态。
由于六自由度运动平台的研制,涉及到机械、电气、控制、计算机、传感器、空间运动数学模型、信号传输处理、图形显示、动态仿真等等一系列高科技领域,六自由度运动平台的研制变成了高等院校、研究院所在控制领域水平的标志性象征。
六自由度运动平台是一个机电液一体化的综合产品,在理论课的指导下,本实验课主要涉及以下三个基本原理:1 电液位置伺服控制系统的基本原理电液位置伺服控制系统以液体作为动力传输和控制介质,利用电信号进行控制输入和反馈。
只要输入某一规律的输入信号,执行元件就能启动、快速并准确地复现输入量的变化规律。
控制系统结构图如图1所示:图1 电液位置伺服控制系统结构图2 六自由度运动平台工作原理及逆解算法六自由度平台又称为Stewart平台,其结构如图2所示,Stewart平台由上、下两个平台、六个驱动关节和连接球铰组成,上平台为运动平台,下平台为基座,上、下平台的六个铰点分别组成一个六边形,连接6个液压缸作为驱动关节,每个液压缸两端各连接一个球铰。
六个驱动关节的伸缩运动是独立的,由液压比例方向阀控制各液压缸作伸缩运动,从而改变各个驱动缸的长度,使运动平台在空间的位置和姿态发生变化。
因此该平台是通过六个驱动杆的协调动作来实现三个线性移动及三个转动共六个自由度的运动。
1630拖拉机液压提升试验装置的分析与设计
1630拖拉机液压提升试验装置的分析与设计拖拉机的液压提升系统是其重要的功能部件之一,它可以实现对前后挂载设备的快速提升和降低,从而提高了拖拉机的使用效率和多功能性。
为了确保液压提升系统的性能和可靠性,需要对其进行严格的试验与评估。
本文将对拖拉机液压提升试验装置的分析与设计进行详细介绍。
首先,我们来分析拖拉机液压提升系统的工作原理。
液压提升系统由油箱、液压泵、液压缸、控制阀等部件组成。
当液压泵启动时,液压油被泵入液压缸中,从而推动活塞向上运动,实现前后挂载设备的提升。
而控制阀则可以通过控制液压油的流向和流量,来控制液压缸的运动速度和提升高度。
为了对液压提升系统进行测试,需要设计一个符合实际工作条件的试验装置。
该试验装置应包括以下主要部件:液压缸、控制阀、液压泵、油箱、油管、压力表、传感器等。
通过控制液压泵和控制阀的工作,可以模拟不同工况下的提升操作,并通过传感器和压力表对液压提升系统的性能和参数进行实时监测和记录。
接下来是试验装置的设计方案。
首先确定试验装置的工作参数,包括提升高度、提升速度、最大承载力等。
然后选择合适的液压缸、液压泵、控制阀等部件,并确保其可以满足设计要求。
在设计油路系统时,需要考虑管道的布置和连接方式,以确保液压油的顺畅流动和不漏油。
同时,还需要设计一套完善的控制系统,包括控制阀的控制方式和液压泵的启停控制。
最后是试验装置的调试和验收。
在确定装置的各个部件加工完成后,进行安装和调试。
通过逐步调整和测试,确保各个部件的正常工作和协调配合。
同时对试验装置进行全面验收,包括功能测试、性能测试和安全测试。
最终,对试验结果进行分析和评估,为拖拉机液压提升系统的性能改进和优化提供参考。
总的来说,拖拉机液压提升试验装置的设计和制造是一个综合性的工程项目,需要综合考虑液压、机械、控制等领域的知识和技术。
通过合理的设计和科学的测试,可以确保拖拉机液压提升系统的性能和可靠性,提高其工作效率和可操作性。
拖拉机新型线控液压转向系统的研究与仿真
K e r s:W ie—c ntol d h d a lc se rn y tm ;F z o to ;PI c n rl y wo d r o r le y r u i te g s se i uz c n rl y D o to ;Si lto mu ain;Trco a tr
Hy a lc S e rng S se fTr c o dr u i t e i y t m o a t r
CH 『 in ANG Ja g—x e ,L h —xo g u U Z i in ,B e—fn AIXu e g’
( .C l g f nier g N nigA r utr n e i , aj g 10 1 C i ; 1 o eeo g e n , aj gi l a U i rt N ni 0 3 , hn l E n i n c u l v sy n2 a
0 引言
拖拉机的转向系统一般是 全液压转 向系统。全液 压转 向系统具有转向灵活轻便 、 性能稳定、 布置方便等优 点, 广泛应用于装载机、 压路机 、 挖掘机等各种工程机械, 但是在使用过程 中常会出现转向沉重、 失灵等故障; 线控 转向系统( t r B — r,B 由于取消了转向盘和 s e— y Wi S W) e e
tee d h n .Malb smu ik W s d frt e smua in o e e t e s se t / i l n a u e h i lt f n i y tm.T e smua in g tte r s o s u v fo l yi d rd s a s o o h t r h i lt o h e p n e c r e o i c l e i— o n
装载机电液换挡操纵阀的设计研究
第一章绪论1.1课题背景及现实意义工程机械工作环境通常比较恶劣,行驶状况复杂,换挡比较频繁,以装载机为例,每个作业循环需要换4 5次档,连续作业每小时须换上千次档[1-2]。
目前我国装载机动力换挡变速箱普遍采用液压动力换挡,即操作者通过软轴或杠杆系统操纵换挡操纵阀,进行变速和换向。
这种换挡操纵方式可靠,维修方便,但安装布置复杂,操纵力大,不能实现自动控制和远距离操作,并且换挡品质较差。
随着液压和电子技术的发展,电液换挡技术逐渐成熟,电液换挡即把电磁铁和换挡操纵阀集成在一起,通过专用的换挡手柄进行换挡控制,换挡操纵阀具有调压功能,同时系统还具有互锁、安全保护等功能,可以使换挡过程平稳快速的完成[3-5]。
由于电液换挡操纵灵活、布置方便,便于实现自动控制,有较好的换挡品质,因此电液换挡技术在装载机领域得到广泛的应用。
我国基础设施建设投入的高速增长,促进了工程机械行业的大发展,我国已经成为工程机械生产和销售的大国 [6]。
世界各大工程机械厂家纷纷进入中国市场,普遍采用电液换挡控制,我国工程机械要想走出国门,也必须配置电液换挡控制系统[7-9]。
由于我国的工程机械在国际市场上竞争力比较低,产品一般是中低端产品,高品质的电液换挡变速箱还不能生产,因此必须要加快电液换挡技术的研究与开发,提高变速箱的换挡品质,赶上国际流行趋势,这是我国工程机械与国际接轨的重要举措。
电液换挡操纵阀连接换挡控制器和离合器,在整个换挡过程中,变速箱功能的实现和对离合器结合过程的控制主要由换挡操纵阀来控制的,换挡操纵阀的设计功能及工作性能直接影响着换挡功能的实现与换挡品质,因此,需要对换挡操纵阀的工作原理和设计过程进行研究。
通过对装载机变速箱换挡过程及影响换挡品质因素的分析,能正确分析理解换挡操纵阀的工作原理和各功能元件的设计过程,并能根据换挡功能要求按照一般规律设计出相匹配的换挡操纵阀是这篇论文的主要目的。
1.2电液换挡控制技术的国内外发展现状1.2.1 电液换挡控制系统的分类电液换挡系统有全自动和半自动之分。
拖拉机液压多路阀工作原理
拖拉机液压多路阀工作原理今天咱就来唠唠拖拉机液压多路阀那点事儿。
你看啊,拖拉机在田地里可是个大忙人呢。
液压多路阀就像是拖拉机液压系统里的大管家,管着好多事儿呢。
这液压多路阀啊,就像一个有好多扇门的大房子。
每个门后面都连着不同的液压设备,比如说那个液压悬挂装置,就像拖拉机的手臂,可以把农具抬起来或者放下去。
这多路阀里面呢,有一些小阀芯,这些小阀芯可调皮了。
它们就像一个个小门卫,在自己的小通道里守着。
当你在拖拉机上操作那个操纵杆的时候,就像是给这些小阀芯下命令呢。
比如说,你想把后面的犁放下去耕地,你就推动相应的操纵杆。
这时候啊,操纵杆就通过一些机械的连接或者液压的信号传递,告诉那个负责犁的小阀芯:“小阀芯呀,该干活啦,把通往犁的液压油通道打开。
”那液压油呢,就像一群勤劳的小蚂蚁,在液压系统里跑来跑去。
液压油在油泵的推动下,从油箱里被抽出来。
油泵就像一个大力士,使劲把液压油往多路阀这边送。
当小阀芯接到命令打开通道后,液压油就欢快地流进连接犁的液压油缸里。
这油缸就像一个大注射器,液压油进去了,活塞就被推着动起来啦。
如果是把犁放下去,那活塞就往外伸,这样就通过一些机械的连杆之类的东西,把犁慢慢放到土里去了。
而且啊,这个液压多路阀还能控制液压油的流量呢。
就像水龙头一样,你可以把水流调大或者调小。
如果想要农具动作快一点,就把液压油的流量调大一点,小阀芯就会把通道开得更大一些,更多的液压油就可以快速地流过去啦。
要是想让动作慢一点呢,就把流量调小。
这就像是在指挥一群小蚂蚁,让它们走得快一点或者慢一点。
再说说多路阀控制多个设备的情况吧。
你想啊,拖拉机有时候不光带着犁,可能还带着播种机啥的。
这时候多路阀就能同时管好几个设备呢。
每个设备都有自己对应的小阀芯和通道。
就像一个大乐团里,每个乐器手都有自己的乐谱,但是都在指挥(也就是操纵杆)的统一调度下。
比如说,你想一边稍微抬起犁,一边让播种机开始工作。
你就通过不同的操纵杆告诉多路阀里不同的小阀芯,让它们按照你的想法来控制液压油的流向和流量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Schematic structure of multidirectional valve
多路换向阀数学模型的建立
根据多路换向阀的结构特点和工作原理, 基于 流量方程、 孔道流量连续性方程及阀芯力平衡 压力方程建立了多路换向阀的整体数学模型, 建立流程 如图 2 所示, 具体包括定差减压阀至手动换向阀节 手动换向阀节流部分至进油单向阀部分和 流部分、 进油单向阀至手动换向阀换向部分 。 定差减压阀至手动换向阀节流部分 1. 2. 1. 1 阀口压力流量方程 1. 2. 1 ( 1 ) 该阀中以全周开口节流和三角型节流形式
2
农
业
机
械
学
报
2014年
为主, 由于全周开口节流型式数学模型较为简单 , 本 文主要针对阀芯位移与三角节流口通流面积对应关 系进行了建模分析。定差减压阀节流口模型如图 3 所示。
— —定差减压阀阀口三角节流口的顶角, βR — rad rR — — —定差减压阀阀口三角节流 口 顶 角 处 m 的连接圆弧半径, dR — — —定差减压阀阀芯直径, m xR — — —定差减压阀阀芯位移, m 定差减压阀节流口的压力流量方程 q R = C dR A R ( x R ) 2 ( p - p1 ) ρ s
)槡
h Rm0 - 2rR
(
h Rm0 2rR
) ]
2
2
( 5)
( 3 ) 定差减压阀阻尼孔压力流量方程 流经阻尼孔的液流流动状态比较复杂, 介于层 流和紊流之间, 一般采用以下经验公式计算
增刊
赵建军 等: 重型拖拉机电液提升器多路换向阀仿真与试验
3
q RD = sign( p' 3 - p3 )
( (
)
)
[
Hale Waihona Puke 槡 ( ) ]( 1)
其中
h Rm0 = r R 1 - sin
3
(
β 2
) [
h Rm2 - x R αR = rR
β cos h Rm0 2 2 A0 = zr R arccos 1 - - zr2 R rR β sin 2
(
)
-
槡
h Rm0 2 1- rR 式中 m 度,
(
h Rm1 — — —定 差 减 压 阀 三 角 节 流 口 部 分 的 高 h Rm2 — — —定差减压阀最大开口量时滑阀台肩 m 节流边部分最大开口量,
*
摘要: 以多路换向阀为研究对象, 分析了多路换向阀的工作原理和结构特点, 利用压力流量方程、 孔道流量连续性 方程及阀芯力平衡方程建立了多路换向阀的状态方程, 并运用 Matlab / Simulink 软件, 选择四阶龙格库塔算法对其 进行了动、 静态性能仿真分析。基于闭心式负载传感液压系统试验平台, 对多路换向阀进行了试验研究, 试验结果 表明: 整个液压系统的压力损失在 1. 5 MPa 左右, 负载压力阶跃变化时, 多路换向阀可实现负载补偿功能; 手动换 多路换向阀内压力冲击小 、 响应特性好; 系统流量仅与多路换向阀调速节流口开度大小有 向阀芯位移阶跃变化时, 关, 不受负载变化影响, 调速性能良好, 满足重型拖拉机电液悬挂系统对多路换向阀的性能要求 。 关键词: 重型拖拉机 多路换向阀 负载传感 仿真 试验 1298 ( 2014 ) S0000109 文章编号: 1000中图分类号: S219. 032. 1 ; TH137. 52 文献标识码: A
2· R R
(
π d RD 12 544 ρμl RD
3
8
)
1 /3
2 /3 | p' 3 - p3 |
q l1 、 q l2 — — —通过换向阀配合间隙由 P1 环槽向 T3 环槽和 P2 环槽的泄漏流量 1. 2. 1. 3 阀芯力平衡方程 定差减压阀阀芯所受的力包括: 阀芯两端油液 压力产生的驱动力、 惯性力、 粘性阻尼力、 弹簧力、 稳 态液动力( 包括在定差减压阀节流口处液流改变产 作用方向指向使其各自阀口关闭 生的稳态液动力, 方向; 此外, 在限流节流口处也存在稳态液动力, 但 由于在此处采用了凸肩补偿措施, 所以忽略此处的 稳态液动力) 、 瞬态液动力 ( 阀中液体加速运动方向 与阀芯运动方向一致, 所以其作用方向与阀芯运动 方向相反 ) 、 干摩擦力以及阀座支撑反力等。 由于 在阀芯上开有多条均压槽, 液压卡紧力很小, 所以取 干摩擦力近似为 0 N。 当 0 < x R < h Rm2 时, 定差减压阀阀芯力平衡方程 为 πd R ( p1 - p' 3) = 4 m R x R + B R x R + K R ( x RS + x R ) + F Rs + F Rt 式中 KR — — —定差减压阀弹簧刚度, N /m x RS — — —定差减压阀阀芯处于阀口全开位置 m 时的弹簧预压缩量, mR — — —定差减压阀阀芯等效质量, kg BR — — —定 差 减 压 阀 阀 芯 粘 性 阻 尼 系 数 , (N · s) / m F Rs — — —定差减压阀阀芯稳态液动力, N F Rt — — —定差减压阀阀芯瞬态液动力, N 1. 2. 2 多路换向阀整体数学模型的建立 参照定差减压阀至手动换向阀节流部分数学模 类比分析其余两部分工作过程, 充分 型的构建方法, 考虑阀芯运动过程中泄漏和液体压缩量补偿等诸多 情况, 建立其余两部分数学模型, 最后将 3 部分数学 模型进行整合, 选取如下状态变量: x1 = p1 ; x2 = p3 ; x3 = p4 ; x4 = x R ; x5 = x R ; x6 = x O ; x7 = x O ; x8 = x B ; x9 =
( 2 ) 限流节流阀节流口和手动换向阀压力回馈 节点前节流口压力流量方程
图2 Fig. 2 数学模型的建立流程
槡
( 2)
q T0 = C dT0 πd T0 x T0 q T1 = C dT1 A T1 ( x D )
槡
2 ( p - p2 ) ρ 1
( 3) ( 4)
Mathematical modeling process
· · · · · · 2
由于 q RD ≈πd x / 4 , 则可得 p' 3 = p3 + 式中 d · · 196 ρμl RD 槡 | xR | xR d 槡
3 R 4 RD
( 6)
q RD — — —阻尼孔流量, m3 / s — —油液的动力黏度, HM46 型抗磨 μ— 选用 L-2 · s 液压油, μ = 4. 14 × 10 Pa d RD — — —定差减压阀阻尼孔直径, m l RD — — —定差减压阀阻尼孔长度, m p' — —定差减压阀弹簧腔油液压力, Pa 3—
图3 Fig. 3 定差减压阀节流口模型
Orifice model of fixed differential reducing valve
节流口流量系数, 取 C dT1 = 0. 61 d T0 — — —限流节流阀节流口部分阀孔直径, m x T0 — — —限流节流阀节流口开口量, 0 ≤ x T0 ≤ 0. 002 5 m p2 — — —限流节流阀的出口油液压力, Pa p3 — — —手动换向阀压力回馈液压泵节点前节 Pa 流口出口压力, A T1 — — —手动换向阀压力回馈液压泵节点前 m 节流口通流截面积, xD — — —手动换向阀阀芯位移, 滑阀在中位时 取为 0 点, 从中立位置往里压入的方 向为正 向, 往 外 伸 出 为 负,- x Dm2 ≤ x D ≤x Dm1 , m 忽略泄漏影响, 通过手动换向阀节流口的流量 q T1 等于限流节流阀的流量 q T0 , 由式( 3 ) 和式 ( 4 ) , 并 可得 取 C dT0 = C dT1 , 2 x T0 ) ( p - p3 ) q T1 = C dT1 A Te1 ( x D , ρ 1 πd T0 x T0 A T1 ( x D ) A ( x , x ) = Te1 D T0 2 A T1 ( x D ) + ( πd T0 x T0 ) 槡 2 ( πd T0 x T0 ) p1 + A2 T1 ( x D ) p 3 p2 = 2 A2 ( x ) + ( d π T1 D T0 x T0 )
引言
作为重型拖拉机电液提升器的关键部件之一, 负载传感多路换向阀的主要作用是进行液力多路输 出控制, 通过其内部的梭阀和定差减压阀反馈最大 负载压力, 进行压力补偿, 经手动换向阀芯调速节流 口实现执行装置的调速功能。 目前多路换向阀在农业机械和工程机械中得到 [1 - 2 ] , 针对多路换向阀结构参数对其工 了广泛应用 作特性的影响, 国内外学者进行了大量研究
1
1. 1
电液提升器多路换向阀数学建模
多路换向阀的结构原理
重型拖拉机电液提升器多路换向阀由定差减压 阀、 限流节流阀、 手动换向阀芯、 单向阀、 梭阀等组 成, 结构原理如图 1 所示, 公称压力为 25 MPa, 公称
0730 修回日期: 20140820 收稿日期: 2014* 国家高技术研究发展计划( 863 计划) 资助项目( 2013AA100307 ) 和中央高校基本科研业务费专项资金资助项目( 2014JD035 ) Email: perc_zjj@ 126. com 作者简介: 赵建军, 博士生, 主要从事车辆智能控制与液压流体传动研究, Email: liushourong@ sina. com 通讯作者: 刘守荣, 教授, 博士生导师, 主要从事数字化设计与制造研究,
[3 - 11 ]
流量为 80 L / min。该阀通过内部梭阀感知负载压力 或流量变化, 将负载所需的压力或流量变化信号 , 传 递给变量泵的流量控制阀, 使变量泵几乎仅向负载 提供其所需的液压功率, 采用负载传感多路换向阀, 有效地减少了系统发热, 达到了节能的目的。