第十一章视图与
高教社2023BIM技术与应用Revit 2023建筑与结构建模教学课件11第十一章 楼梯与栏杆扶

11.1 楼梯
11.1.2 楼梯的类型 ✓组合楼梯:钢楼梯 ✓现场浇筑楼梯(整体浇筑楼梯):混凝土楼梯。 默 认是混凝土板式楼梯,可设置属性,变为梁式楼梯。 ✓预浇筑楼梯:预制楼梯
11.1 楼梯
11.1.3 板式楼梯的创建 1、建筑->楼梯 2、选择“整体浇筑楼梯”。
11.1 楼梯
3、选中梯段,会出现梯段长度、宽度调整符号。 拖动可调整梯段大小、宽度。
11.1 楼梯
4、梯段末端,两个操作符号的不同: ✓圆点:拖动仅会增加或减少本段梯段的踏步数量。 ✓三角:拖动不仅增加或减少本段梯段的踏步数量,其他相关梯段会相应减少或增加,保 持总踏步数不变。
11.1 楼梯
11.1 楼梯
11.1.4 楼梯的组成 梯段:直梯、螺旋梯段、U形梯段、L形梯段、创建草图 平台:即休息平台,三种创建方式:在梯段之间自动创建、通过拾取两个梯段进 行创建、自定义绘制 支座:含梯边梁、踏步梁。
11.1 楼梯
11.1.5 楼梯的编辑 1、选中楼梯,会出现“编辑楼梯”菜单。点击后,即可编辑楼梯。 2、楼梯会出现踏步单上的“梯段”,点击“直梯”。 5、在常用属性条,输入“实际梯段宽度”。
11.1 楼梯
6、点击楼梯的起始点,再点击第一跑的结束点,完成第一跑楼梯的绘制。 ✓注意:Revit会自动提示已绘制的踏步数量。 7、点击第二跑楼梯的起始点,再点击第二跑楼梯的结束点。 ✓注意:(1)Revit会自动生成休息平台。 ✓(2)两跑楼梯之间,应留有间隙,无法无法生成平台。
第十一章 楼梯与栏杆扶手
目录
11.1 楼梯 11.2 栏杆扶手
2
Revit的楼梯与我们常说的楼梯的不同: ✓我们常说的楼梯:包括楼梯和栏杆扶手两部分 ✓Revit中的楼梯:则仅仅是指楼梯,而不包括栏杆扶手。
川师大学物理第十一章-恒定电流的磁场习题解
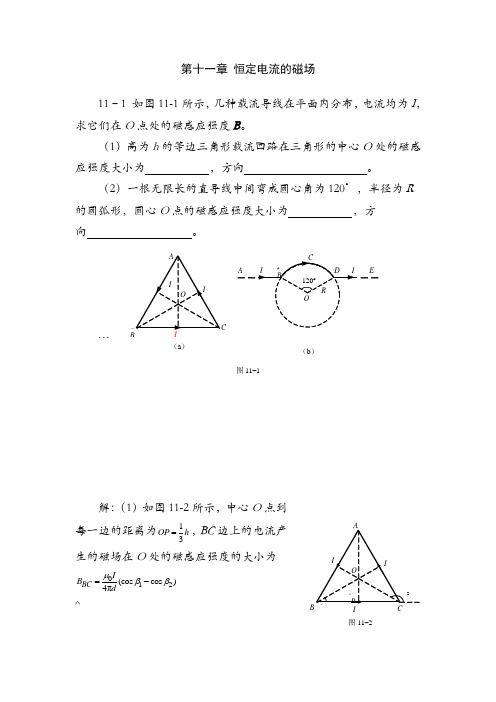
第十一章 恒定电流的磁场11–1 如图11-1所示,几种载流导线在平面内分布,电流均为I ,求它们在O 点处的磁感应强度B 。
(1)高为h 的等边三角形载流回路在三角形的中心O 处的磁感应强度大小为 ,方向 。
(2)一根无限长的直导线中间弯成圆心角为120°,半径为R 的圆弧形,圆心O 点的磁感应强度大小为 ,方向 。
…解:(1)如图11-2所示,中心O 点到每一边的距离为13OP h =,BC 边上的电流产生的磁场在O 处的磁感应强度的大小为012(cos cos )4πBC I B dμββ=-^IB21图11–2图11–1…B(a )AE(b )0(cos30cos150)4π/3Ih μ︒︒=-=方向垂直于纸面向外。
另外两条边上的电流的磁场在O 处的磁感应强度的大小和方向都与BC B 相同。
因此O 处的磁感应强度是三边电流产生的同向磁场的叠加,即3BC B B ===方向垂直于纸面向外。
(2)图11-1(b )中点O 的磁感强度是由ab ,bcd ,de 三段载流导线在O 点产生的磁感强度B 1,B 2和B 3的矢量叠加。
由载流直导线的磁感强度一般公式012(cos cos )4πIB dμββ=- 可得载流直线段ab ,de 在圆心O 处产生的磁感强度B 1,B 3的大小分别为01(cos0cos30)4cos60)IB R μ︒=︒-︒π(0(12πI R μ=-031(cos150cos180)4πcos60IB B R μ︒==︒-︒0(12πI R μ=-】方向垂直纸面向里。
半径为R ,圆心角α的载流圆弧在圆心处产生的磁感强度的大小为04πI B Rμα=圆弧bcd 占圆的13,所以它在圆心O 处产生的磁感强度B 2的大小为00022π34π4π6II I B R R Rμμαμ===方向垂直纸面向里。
因此整个导线在O 处产生的总磁感强度大小为000012333(1)(1)0.212π22π26I I I I B B B B R R R Rμμμμ=++=-+-+=方向垂直纸面向里。
Excel2007新手特训-第十一章
第十一章打印工作表本章将主要介绍打印设置的操作,帮助大家快速熟悉Excel工作表的打印。
本章导读重点讲解重点讲解预览打印效果设置页边距添加打印机在打印工作表之前,用户首先要在操作系统中完成打印机的添加。
用户可以添加本地计算机中的打印机,也可以添加网络打印机。
下面以添加本地计算机中的打印机为例向大家介绍添加打机的方法。
单击”添加打印机“在桌面上单击”开始“按钮,在弹出菜单中选择”打印机和传真“命令,打开”打印机和传真“窗口。
单击”下一步“按钮选择打印机和传真选择连接到此计算机的本地打印机选择端口单击”下一步“按钮Step 10 输入打印机名单击”下一步“按钮单击”下一步“按钮单击”下一步“按钮在选择打印机端口页面中选择”使用以下端口“选项,并选择端口。
单击”下一步“按钮,打开安装打印机软件页面。
在命名打印机页面的”打印机名“文本框中输入打印机名称。
教你一招在添加网络打印机时,可在”添加打印机向导“对话框中的本地或网络打印机页面选择”网络打印机或连接到其它计算机的打印机“选项,然后根据提示进行安装。
在”打印机和传真“窗口左侧单击”添加打印机“,打开”添加打印机向导“对话框。
在”添加打印机向导“对话框中单击”下一步“按钮,打开本地或网络打印机页面。
在本地或网络打印机页面选中”连接到此计算机的本地打印机“选项。
单击”下一步“按钮,选择打印机端口页面。
在安装打印机软件页面选择打印机厂商及软件。
单击”下一步“按钮,打开命名打印机页面。
选择厂商预览打印效果在设置好工作表之后,用户可以通过提供的打印预览功能查看工作表的实际打印效果。
如果对打印效果不是很满意,可以及时进行调整。
下面向大家介绍预览打印效果的操作步骤。
选择否打印机添加成功单击”Microsoft Office“按钮单击”下一步“按钮单击”完成“按钮在正在完成添加打印机向导页面单击”完成“按钮。
单击”下一步“按钮,打开打印测试页页面。
在打印测试页页面选择”否“。
第十一章 相贯线
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
例7:求圆柱与圆锥斜交的相贯线
分析 圆柱与圆 锥轴线斜 交,相贯 线的三个 投影均未 知,可利 用辅助球 面法求共 有点; 有点;
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
2 ' 3 ' 1 '
2 " 3 " 1 "
特殊情况
画 7、组合相贯 、 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 三个或三个以上的立体相交在一起,称为组合相贯。 三个或三个以上的立体相交在一起,称为组合相贯 组合相贯。 大 相贯线由若干条相贯线组合而成,结合处的点称为结合点 结合点。 学 相贯线由若干条相贯线组合而成,结合处的点称为结合点。
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
6、两曲面立体的相贯线 、
不同的立体以及不同的相贯位置、相贯线的形状不同。 不同的立体以及不同的相贯位置、相贯线的形状不同。
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
1) 求两曲面立体的相贯线的方法: 求两曲面立体的相贯线的方法: 表面取点法 辅助平面法 辅助球面法(同心、异心) 辅助球面法(同心、异心) 回转平面法 作图实质是找出相贯的两立体表面的若 实质是找出相贯的两立体表面的 作图实质是找出相贯的两立体表面的若 干共有点的投影 的投影。 干共有点的投影。
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
画 法 几 何 及 机 械 制 图 . 北 京 航 空 航 天 大 学
机械制图(多学时)课件11 第十一章 焊接图
钝边尺寸:2
焊缝在箭 头一侧
焊接方法: 埋弧焊
钝边单边V 形焊缝
互联网+立体化教材配套资料
第五节 识读焊接装配图
圆管与支撑板:双面 角焊缝,焊接尺寸4, 周围焊缝
圆管与肋板,肋板与 底板:双面角焊缝, 焊接尺寸4
支撑板 与肋板: 双面角 焊缝, 焊接尺 寸4
互联网+立体化教材配套资料
支撑板与底板:箭头 一侧角焊缝,焊接尺 寸4
2、基本符号和基准线的位置 1)基本符号在细实线一侧时,焊缝在箭头侧 2)基本符号在细虚线一侧时,焊缝在非箭头侧 3)标注对称焊缝和双面焊缝或接头时,基准线上的基本符
号可以组合使用,可省略基准细虚线
互联网+立体化教材配套资料
第四节 焊缝的标注
互联网+立体化教材配套资料
第四节 焊缝的标注
二、焊缝尺寸符号及数据的标注要求
第三节 焊缝的表达方法
3、指引线
箭头线(细实线)
基准线(细实线)
互联网+立体化教材配套资料
基准线(细虚线)
第三节 焊缝的表达方法
3、指引线 重要:箭头一侧和非箭头一侧
互联网+立体化教材配套资料
第三节 焊缝的表达方法
4、焊缝尺寸
坡口角度 α 根部间隙 b 焊接尺寸 K
坡面角度 β 钝边 P
互联网+立体化教材配套资料
互联网+立体化教材配套资料
第二节 焊接图的概述
▪一、概述 ▪二、焊缝的基本知识
互联网+立体化教材配套资料
第二节 焊接图概述
一、概述
焊接图是供焊接加工所用的一种图样,除了把焊接件 的结构表达清楚以外,还必须把焊接的有关内容表示清楚。 为此,国家标准规定了焊缝的画法、符号、尺寸标注方法 和焊接方法的表示代号。
第十一章装配图教案
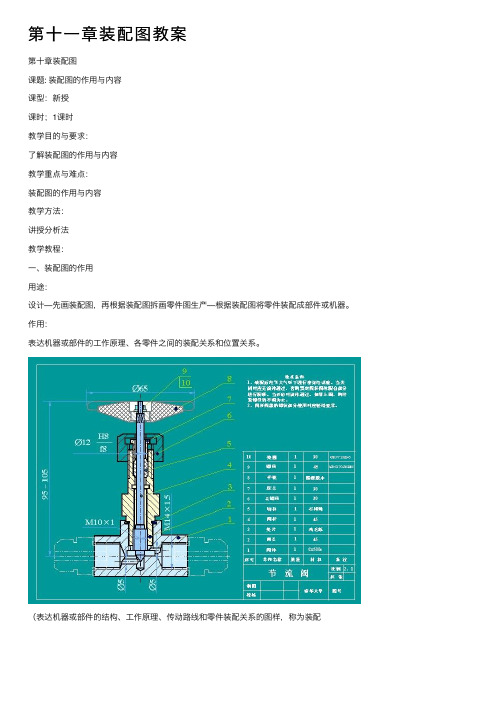
第⼗⼀章装配图教案第⼗章装配图课题: 装配图的作⽤与内容课型:新授课时;1课时教学⽬的与要求:了解装配图的作⽤与内容教学重点与难点:装配图的作⽤与内容教学⽅法:讲授分析法教学教程:⼀、装配图的作⽤⽤途:设计—先画装配图,再根据装配图拆画零件图⽣产—根据装配图将零件装配成部件或机器。
作⽤:表达机器或部件的⼯作原理、各零件之间的装配关系和位置关系。
(表达机器或部件的结构、⼯作原理、传动路线和零件装配关系的图样,称为装配图。
作⽤——是制定装配⼯艺规程,进⾏装配、检验、安装及维修的技术⽂件。
)⼆、装配图的内容1、⼀组视图表达各组成零件的相互位置、装配关系和连接⽅式,部件(或机器)的⼯作原理和结构特点等。
(表达机器或部件的结构、⼯作原理、装配关系、各零件的主要结构形状)2、必要的尺⼨必要的尺⼨包括部件或机器的规格(性能)尺⼨、零件之间的配合尺⼨、外形尺⼨、部件或机器的安装尺⼨和其它重要尺⼨等。
(机器或部件的规格、配合、安装、总体尺⼨)3、技术要求说明部件或机器的性能、装配、安装、检验、调整或运转的技术要求,⼀般⽤⽂字写出。
4、零部件序号、明细栏和标题栏标题栏:说明名称、重量、⽐例、图号、设计单位等;明细表:列出机器或部件中各零件的序号、名称、数量、材料等。
(在装配图中对零件进⾏编号,并在标题栏上⽅按编号顺序绘制成零件明细表)附:装配图的内容图。
四、作业课题: 装配体的表达⽅法课型:新授课时;1课时教学⽬的与要求:了解装配图的作⽤与内容教学重点与难点:装配图的作⽤与内容教学⽅法:讲授分析法教学教程:装配图对零件的⼀些特殊的表达⽅法⼀、规定画法1、相邻两零件接触表⾯和配合⾯规定只画⼀条线,不接触表⾯画两条线。
2、两零件邻接时,不同零件的剖⾯线⽅向应相反,或者⽅向⼀致、间隔不等(如下图)。
3、对于紧固件和实⼼零件(如螺钉、螺栓、螺母、垫圈、键、销、球及轴等),若剖切平⾯通过它们的轴线或对称平⾯时,则这些零件均按不剖绘制;需要时,可采⽤局部剖视。
11第十一章 三维实体
(200,100)
变换坐标系绘制圆形
使用UCS命令变换坐标系 移动 绕X轴旋转 绘制圆
在三维中编辑图形
绘制小圆、阵列 修剪:同一坐标面对象在当前UCS中 的XY坐标面上才能被修剪。
二、三维实体
创建基本实体 用拉伸方法创建实体 用旋转方法创建实体 实体的集合运算 实体对象的编辑 消隐和边界线可见性控制
操作说明:
指定圆柱体顶 ( 底 ) 面中心点 ,基面圆的半径 ( 或直径 ), 圆柱 高确定圆柱。 圆柱体基面圆在 xy 坐标面上 ,高度为正沿 Z 轴正向,否则为 反向。 还可用于创建椭圆柱体。
在(100,100) 处绘制底圆半径 35、高为120的 圆柱体
半高处绘制圆柱体 移动用户坐标
旋转X轴
命令: revolve 当前线框密度: ISOLINES=4 选择对象: (选择面域) 选择对象:Enter 指定旋转轴的起点或 定义轴依照 [对象(O)/X 轴 (X)/Y 轴(Y)]: x 指定旋转角度 <360>: Enter
其中各子项的含义如下:
1)默认项 指定旋转轴的起点: (指定旋转轴的起点,此为默认项。) 指定轴端点: (指定轴的另一端点) 指定旋转角度 <360>: (输入旋转角度,缺省值为360度)
三维实体
一、三维建模基础知识 二、创建基本三维实体 三、由二维创建三维实体 四、布尔运算 五、三维实体编辑 六、显示控制 七、输出其他格式数据
一、三维建模基础知识
1.
2.
3.
4.
用户坐标 视口 设置视点 绘制三维元素
中国.中学政治教学网崇尚互联共享
1、坐标系
实体的集合运算
第十一章 轴测图
第十一章轴测图上一章所讲述的组合体的视图,是物体在相互垂直的两个或三个投影面上的多面正投影。
多面正投影图是工程上应用得最广的图样,它能够准确地表达出物体的形状和大小,但是这种图缺乏立体感,通常需要对照几个视图和运用正投影原理进行阅读,才能想象出物体的形状。
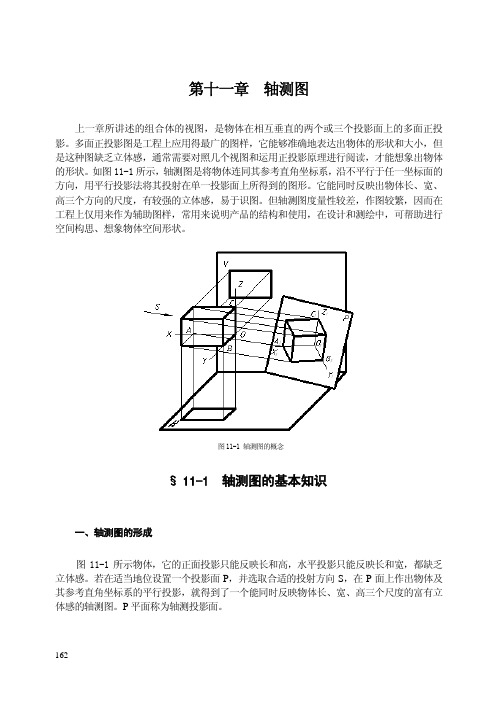
如图11-1所示,轴测图是将物体连同其参考直角坐标系,沿不平行于任一坐标面的方向,用平行投影法将其投射在单一投影面上所得到的图形。
它能同时反映出物体长、宽、高三个方向的尺度,有较强的立体感,易于识图。
但轴测图度量性较差,作图较繁,因而在工程上仅用来作为辅助图样,常用来说明产品的结构和使用,在设计和测绘中,可帮助进行空间构思、想象物体空间形状。
图11-1 轴测图的概念¤ 11-1 轴测图的基本知识一、轴测图的形成图11-1所示物体,它的正面投影只能反映长和高,水平投影只能反映长和宽,都缺乏立体感。
若在适当地位设置一个投影面P,并选取合适的投射方向S,在P面上作出物体及其参考直角坐标系的平行投影,就得到了一个能同时反映物体长、宽、高三个尺度的富有立体感的轴测图。
P平面称为轴测投影面。
162二、轴向伸缩系数和轴间角仍如图11-1所示,空间直角坐标系OX 、OY 、OZ 轴在轴测投影面上的投影O 1X 1、O 1Y 1、O 1Z 1称为轴测轴,分别简称为X 1轴、Y 1轴、Z 1轴。
当空间有直角坐标轴上的线段(或物体上与各直角坐标轴平行的线段)与轴测投影面平行时,它们在轴测投影面上的投影长度不变。
如果处于倾斜,它们的投影长度与原来的线段长度比较变短了,其长度变化的比称为轴向伸缩系数,我们用p 、q 、r 分别表示X 1、Y 1、Z 1轴的轴向伸缩系数。
从图中可以看出:οOCC O OB B O OA AO 111111r ,q , p === p 、q 、r 是变化的,它的变化是由坐标轴OX 、OY 、OZ ,投影面P ,投射方向S 相对位置不同决定的,它的变化将直接影响物体轴测图形状和大小的变化。