(完整版)振动盘设计手册
振动盘-通用技术规格书130719
部品整送装置购入规格书KYP-K-218-1/51、适用本规格书适用于分选机(SMF-3202)所使用的部品整送装置的购入。
2、规格2-1 整送试料1)种类:1种类2)名称:S小型3P3)外形尺寸:别纸P5/54)样品支给:1000个5)老化试料:个6)材质:7)质量:g/个2-2 整送能力1)750个/分以上1列(2000个投入时)2)盘内残量从200个到10个以内3分以内(努力目标)2-3 盘供料材质:铝外形:Φ200~Φ240振动机:型号完全委托软线长度:1.5m内面处理:镀镍(或者同等处理)排出门:有(在指定位置加工)垃圾去除孔:无投入量:约4000个2-4 直线料道材质:不锈钢(SUS304)振动机:型号完全委托软管长度:1.5m硬化处理:完全委托表面处理:完全委托杜塞排出门:无2-5 供给溢出传感器方式:光电传感器(透过式)设置:直线滑槽2-6 料斗:有(无导向弯曲)材质:完全委托形状:完全委托(带漏斗300ml)内面处理:完全委托容量:0.3L方式:完全委托软管长度:1.5m2-7 控制器盘、直线:有料斗:有ON/OFF计时器功能:有软管长度:1.5mON/OFF外部输入(1根):有(OFF全停止)2-8 电源AC200V(单相)50/60HZ输入电源电线为1根电线长度(3芯):2.0m电磁阀、传感器等的DC24V由振动盘侧供电2-9 空气使用:可(在指定位置安装专用调压阀)2-10 涂装色:厂商标准2-11 噪音值:无指定3、试料整列姿势达成率99.95%以上4、有关试料变形的规定试料模型的破损、极端的毛刺以及导向弯曲等故障除外。
但是,通常的毛边参照试料样品处理,保证无故障。
※有关本项目若有疑义,参照样品另行商议。
5、制作尺寸图参照P4/56、确认图签约后,提出2份确认图。
经购入担当确认后制作。
另外,确认图中的1份在确认后按章回传。
7、立会检查出货前有关本规格书的各指示事项,提出1份试验成绩表。
振动盘最全面技术说明..

振动盘工作原理一.振动盘简介:振动盘是一种自动定向排序的送料设备. 振动盘的组成:料斗\底盘\控制器\直线送料器等配套组成.其工作目的是通过振动将无序工件自动有序定向排列整齐,准确地输送到下道工序. 振动盘的料斗分为筒形料斗,螺旋,线料斗,锥形料斗,等分线料斗等五种; 底盘有正拉底盘,侧拉底盘,压电式底盘,精密底盘四种; 控制器分为普通控制器,调频控制器,分级控制器,带缓启动控制器,数显调频控制器五种; 直线送料器可根据客户需求订制各式各样型号直线送料器,也可根据产品要求订制. 振动盘是一种自动组装机械的辅助设备,是一种能自动定向排序的送料设备.能把各种产品有序排出来,它可以配合自动组装设备一起将产品各个部位组装起来成为完整的一个产品.作用:广泛应用于电池\五金\电子\医药\食品\塑胶插件\喷雾器\连接器\精密振动盘应用等各个行业,是解决工业自动化设备供料的必须设备.振动盘辅助产品:底盘\顶盘\控制器\直线送料器\振动平台料仓\涂层电磁振动上供料器从结构上分:直槽往复式和圆盘扭动式.其中直槽式一般作为不需要定向整理的粉粒状物料的给料器,或用于清洗,筛选,烘干加热,冷却等操作.圆盘式多用于需要定向整理的,有一定形状和尺寸的物料的上供料.二.振动盘工作原理料斗下面有个脉冲电磁铁,可以使料斗垂直方向上下振动,由于弹片的倾斜,使料斗绕其垂直轴做扭摆振动,料斗内零件,由于受到这种振动,而沿螺旋轨道上升,直到送到下道工序运动状态:直线形料斗是往复直线式振动,而圆筒形是往复扭转式振动.主要是由一个振动马达作动力,振动马达工作时产生定向频率的力,只要把振动盘看成是一个斜面,再对这个斜面进行物理学的受力分析,你就能很容易理解它的工作原理了.振动盘电磁线圈在工作中,斜面受电磁力会微小的上下振幅,调整振动盘的工作频率以及间隙,就可以实现顺利工作.三振动盘调整步骤与要点(1)确认振动本体位于盘面确实锁固(2)将控制器按钮调至中间位置(3)将电源打开,查看振动盘输送速度是否达到要求(4)若没有达到要求,将锁付弹片之固定螺丝松脱任意一支,查看振动速度变化(5)若松脱弹片固定螺丝,振动速度变快,则表示弹片过厚,适度减少弹片数量或厚度后,再进行步骤(4),再次调试(6)反之则适度增加弹片或厚度后,再进行步骤(4),再次调试(7)若步骤(4)的调整,振动速度变化不大时,则表示已完成弹片调整(8)电磁铁要对齐,间隙在1---1.5mm,间隙要平行四.定购一台合适的振动盘,首先要充分了解您的要求及配合主机使用情况(9)正式生产中使用的工件样品或图纸(10)振动盘的送料方向(顺时针,逆时针)(11)工件在振动盘出口时的状态,出料速度(12)振动盘的空间限制及安装位置,供电\供气情况(13)外观涂层等其它要求(交货期一般为7---15天,免费安装调试,保修三年)五.电磁振动上供料器的工作过程,是由于电磁铁的吸引和支承弹簧的反向复位作用,使料槽产生高速高频(50---100次/秒),微幅(0.5---1mm)振动,使工件逐步向高处移动.当I=0时,料槽在支承弹簧作用下向右上方复位,工件依靠它与轨道的磨擦而随轨道向右上方运动,并逐步被加速.当I>0时,料槽在电磁铁的吸引下向左下方运动,工件由于惯性作用而脱离轨道,继续向右上方运动(滑移或跳跃),再经过光纤放大器的光电转换作用,经集成线路模拟转换至下一循环,周而复始,工件在轨道上作由低到高的运动.六.电磁式振动盘的工作原理:振动盘是由振动板,电磁铁,衔铁,弹簧片,安装座,减振胶垫组成,利用控制器产生与系统固有频率相同的脉冲电流使电磁铁励磁后,系统发生共振,衔铁及振动板会快速的拉向电磁铁,因为下降速度很快,所以物料会浮在空中,并在重力作用下落向料盘,接着在弹簧片的作用下,衔铁及振动板又被推回,这时使料盘内的物料向前方移动,该作用以每分钟3000---10000次或更高的次数反复进行,使用权料盘内的物料平滑移动.交流电压使电磁铁产生磁场,由于频率很高,故产生的磁力也是瞬间变化的,底盘下面有3---6组一定的角度弹簧片,当电磁铁同交流电瞬间产生磁场,弹簧片受压,当电压正弦波变化的时候,弹簧片弹回来,就产生了力.七.振动盘主要技术参数1.额定电压为交流220/110V,频率为50/60HZ,振动盘根据需要采用半波/全波励磁2.振动盘规格:顶盘直径80---1000mm3.振动盘按物料走向可分为顺时针/逆时针走向八.使用及维护1.检查主机各部紧固件是否有松动2.安装时一定要使减振元件上下对齐,并使上下丝孔对应3.振动盘高度及水平调整好之后,将下座紧固在支架或固定板上4.在振动盘出口与应件相接时要留有一定的间隙,以避免影响振动效果5.振动盘是电气插头装在控制盒上,要注意防水防油.接通220/110V电源后,打开开关,缓慢转动电位器(可调变阻器),逐步达到需要的送料数量即可.注意在接通电源前,一定要将电位器调至最小位置,以免损坏晶体管等电器元件6.振动盘在正常运行两年后,应将底盘各部件拆开,拭去灰尘,清洁污物后并重新调试,使之达到所要求的送料数量九.振动盘技术参数障及排除方法4.通电源后不振动,检查电控器保险丝是否熔断,电气元件是否松动,插头座是否接触不良,电器元件是否损坏5.速度不够(1)检查紧固弹性钢片是否断裂或紧固螺丝松动(2)电磁铁间隙是否过大,正常间隙在1---1.5mm,对小型振动盘的电磁铁,衔铁间隙就在0.5---1.2mm范围内,铁芯与衔铁一作平面不平衡度<0.02mm3.电磁铁线圈温升偏高或线圈烧毁(1)铁芯与衔铁间隙过大,易出现烧线圈现象(2)适应于全波振动的电磁铁,如果用于半波电源,会出现温升偏高现象(3)外界气温偏高,影响线圈散热十一。
振动盘制作方法大全

振动盘制作方法大全引言振动盘是一种常见的工业设备,可以通过振动来分离、筛选或输送物料。
本文将介绍一些常见的振动盘制作方法,希望对读者有所帮助。
1. 材料准备制作振动盘所需的主要材料和工具如下:•A型钢:用于制作振动盘的外框架。
•钢板:用于制作振动盘的底座和振动盘。
•振动电机:用于提供振动力。
•螺栓、螺母和垫圈:用于固定和连接各个部件。
2. 制作步骤2.1 制作外框架首先,使用A型钢制作振动盘的外框架,根据设计要求进行切割和焊接。
确保外框架结构牢固,能够承受振动力。
2.2 制作底座接下来,使用钢板制作振动盘的底座。
根据需要的尺寸和形状,切割和折弯钢板,并使用螺栓、螺母和垫圈将底座固定在外框架上。
2.3 安装振动电机将振动电机安装在外框架的底座上,使用螺栓和垫圈将其固定。
确保振动电机的位置和角度能够提供所需的振动力。
2.4 制作振动盘使用钢板制作振动盘,根据设计要求进行切割和折弯,并使用螺栓、螺母和垫圈将其固定在振动电机上。
2.5 连接电源将振动电机与电源连接,确保电源稳定并符合要求。
根据需要,可以考虑安装某些控制器或调速装置,以实现对振动力的调整和控制。
3. 使用和维护制作完成的振动盘可以用于分离、筛选或输送物料。
使用时,应注意以下事项:•将物料均匀地放置在振动盘上,避免过载或不均匀加载。
•定期清洁振动盘,以确保其正常工作和延长使用寿命。
•定期检查和维护振动电机,确保其工作状态良好。
•遵循操作手册中的安全规范和操作指导。
4. 总结本文介绍了制作振动盘的主要材料准备和制作步骤。
在制作过程中,需要注意结构的牢固性、振动电机的安装和连接、振动盘的制作和安装等关键要点。
同时,在使用和维护振动盘时,要遵循安全规范和操作指导,保持设备的正常工作状态。
希望本文对读者在制作和使用振动盘方面提供了一些有用的信息和指导。
如果您需要进一步了解振动盘制作方法,建议查阅相关的专业文献和资源。
振动盘操作手册
適用:enplas lens 專用機
內容 1. 操作須知 ( P.1-4 功能性結構簡介 ) 2. 清潔維護 ( P.5 保養須知 ) 3. 問題排除 (P.6-8 送料不順暢時的調整說明 ) 4. 附件資料 (P.9 振動盤控制器操作 )
日期:102年5月15日
操作須知
工作電源
縮寫
End On.d OFF.d InU On.S OFF.S bAnd HI.U LO.U FUSE STEP 2nd ALAr dISP HOP.C dUAL
功能
離開並返回 ON Delay 時間 OFF Delay 時間 外部控制信號正反相 ON SOFT 緩啟動時間 OFF SOFT緩停止時間 頻率波段選擇 輸出電壓上限值 輸出電壓下限值 電子無溶絲開關 輸出電壓粗細調 兩段速度切換控制 無料停機並警報 顯示器亮度調整 HOPPER防溢料控制 DUAL雙輸入串聯控制
P-09
結語
1. 本說明資料提供一般作業與技術操作參考。 2. 若有需要,將視需求修正及更新。
P-10
調整方式:
【進料遲緩】 1. 請提升圓振工作頻率及工作電壓,至送料平順即可。
P-08
附件一
基本操作 電壓調整: 直接旋轉PF旋鈕或LF旋鈕,即可自動切換並改變電壓值及振幅大小 (顯示器右側亮V燈). 頻率調整: 按PF旋鈕或LF旋鈕0.5秒後放開,顯示器閃爍並進入頻率調整功能 (顯示器右側亮Hz燈).
人機介面
提供感測訊號與震動盤控制器協調運作的控制器。
出廠前均已完成設定,非必要不建議進行調整與重新設定。
感測訊號處理器
接收感測訊號並驅動氣壓缸、輔助送料空氣及直振作動、關閉的訊 號處理器。
出廠前均已完成設定,非必要不建議進行調整與重新設定。
振动盘毕业设计
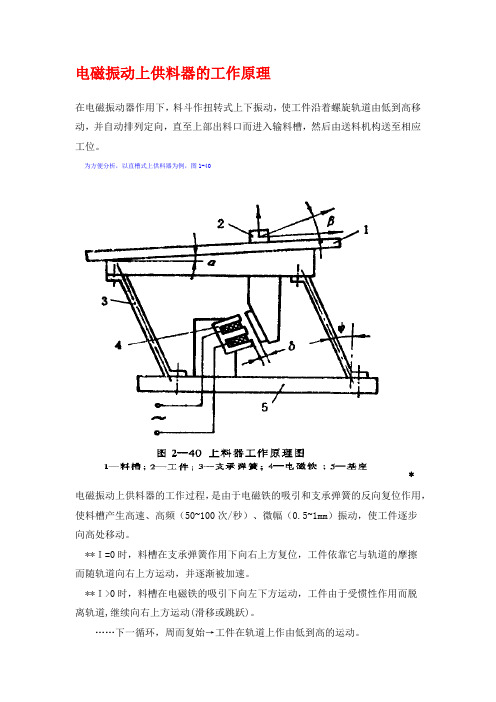
振动盘毕业设计【篇一:振动盘设计手册】电磁振动上供料器的工作原理在电磁振动器作用下,料斗作扭转式上下振动,使工件沿着螺旋轨道由低到高移动,并自动排列定向,直至上部出料口而进入输料槽,然后由送料机构送至相应工位。
为方便分析,以直槽式上供料器为例,图1-40*电磁振动上供料器的工作过程,是由于电磁铁的吸引和支承弹簧的反向复位作用,使料槽产生高速、高频(50~100次/秒)、微幅(0.5~1mm)振动,使工件逐步向高处移动。
**I=0时,料槽在支承弹簧作用下向右上方复位,工件依靠它与轨道的摩擦而随轨道向右上方运动,并逐渐被加速。
**I0时,料槽在电磁铁的吸引下向左下方运动,工件由于受惯性作用而脱离轨道,继续向右上方运动(滑移或跳跃)。
下一循环,周而复始→工件在轨道上作由低到高的运动。
1、工件在轨道上的受力分析* 工件在轨道上的受力:自重力、轨道反力、摩擦力、惯性力; *摩擦力、惯性力与电磁铁的电流有关。
(1)I=0时,支承弹簧复位,轨道以加速度a1向右上方运动,工件力平衡如图1-41:(2)I0时,电磁铁吸引,轨道以加速度a2向左下方运动,工件受力平衡如图1-42:2、工件在轨道上的运动状态分析(1)运动分析根据受力分析,工件在轨道上的运动有两种可能性:a、因惯性沿轨道下滑,此时I=0,且有——当轨道向右上方运动的加速度a1满足上式时,工件便会沿轨道下滑。
这对振动上供料机构是不希望出现的。
b、沿轨道上行,此时根据电磁铁吸合与否可得:——电磁振动供料器要实现预定的上供料,轨道向右上方运动的加速度a1和向左下方运动的加速度a2必须满足上述工件沿轨道上行时的条件式。
工件沿轨道上行时的运动状态随多种条件而变。
(2)运动状态图1-43 工件在料道上的运动状态(a)连续跳跃;(b)断续跳跃;(c)连续滑移;(d)断续滑移注:图示为料槽的两极限位置。
a、连续跳跃* 运动过程:I=0、弹簧使料斗复位,工件依靠摩擦、空间位置从a点上行到b 点;↓I0、电磁铁吸合,由于惯性、工件由b点跳跃起来↓(腾空时间≥料斗运行至最下方的时间)I=0、工件再落至轨道上时已到达c点→后又随轨道上行到d点。
柔性振动盘技术手册

GF-ZDP1723目录一概述 (3)二软件功能 (4)2.1 主界面 (4)2.2 配置界面 (5)2.2.1 单一动作设置 (5)2.2.2 数字量输入配置 (6)2.2.3 电机配置 (7)2.2.4 RS485 配置 (7)2.2.5 RS232 配置 (8)2.2.6 MODBUS 配置 (8)2.2.7 动作组合 (11)2.2.8 照明强度 (12)2.2.9 触摸屏设置 (12)2.2.10 硬件测试 (13)2.2.11 本机信息 (13)三机械尺寸 (14)3.1 设备外形尺寸图 (14)3.2 料盒尺寸图 (15)3.3 安装尺寸 (16)GF-ZDP1723 是一款小型的柔性上料器。
自带可调光源,可以灵活的用于轻薄物料的上料;带有1 路RS232 和1 路RS485,都支持MODBUS 协议通讯;带有2 路数字量输入端口,可以软件配置用途;带有一块4.3 寸电阻式触摸屏,所有的参数都可以在触摸屏上进行配置,不需要额外接工控机。
1.120W2.3.4.图2-1 系统主界面如上图所示,主界面实时显示当前系统的状态参数。
点击右下角的“系统配置”可以进入系统的配置菜单。
数字量输入n :数字量输入动作的时候显示“1”,不动作的时候显示“0”;照明强度 (%):背光光源关闭的时候显示“0”,开启的时候显示对应的亮度(百分比,取值范围10%~100%);电机状态(T):电机停止运行的时候,显示“0”;电机运行单一动作的时候,显示单一动作编号(取值范围1~11);电机运行动作组合的时候显示动作组合编号(取值范围1~10);当前频率 (%):当前频率显示当前电机的频率(百分比,取值范围10%~90%);当前振幅 (%):当前振幅显示当前电机的振幅(占空比,取值范围1%~80%);过热保护 (B):系统是否发生过热保护。
“0”没有报警,“1”表示发生报警。
过热计时 (S):过热保护的定时器,单位:秒。
(完整版)振动盘设计手册
(完整版)振动盘设计⼿册电磁振动上供料器的⼯作原理在电磁振动器作⽤下,料⽃作扭转式上下振动,使⼯件沿着螺旋轨道由低到⾼移动,并⾃动排列定向,直⾄上部出料⼝⽽进⼊输料槽,然后由送料机构送⾄相应⼯位。
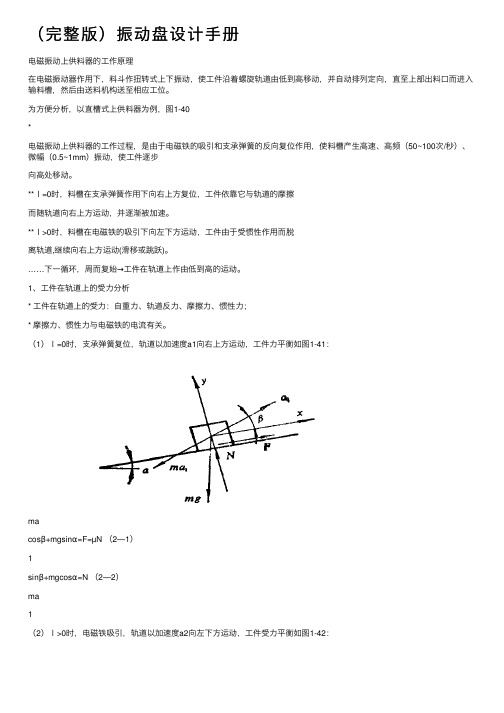
为⽅便分析,以直槽式上供料器为例,图1-40*电磁振动上供料器的⼯作过程,是由于电磁铁的吸引和⽀承弹簧的反向复位作⽤,使料槽产⽣⾼速、⾼频(50~100次/秒)、微幅(0.5~1mm)振动,使⼯件逐步向⾼处移动。
**I=0时,料槽在⽀承弹簧作⽤下向右上⽅复位,⼯件依靠它与轨道的摩擦⽽随轨道向右上⽅运动,并逐渐被加速。
**I>0时,料槽在电磁铁的吸引下向左下⽅运动,⼯件由于受惯性作⽤⽽脱离轨道,继续向右上⽅运动(滑移或跳跃)。
……下⼀循环,周⽽复始→⼯件在轨道上作由低到⾼的运动。
1、⼯件在轨道上的受⼒分析* ⼯件在轨道上的受⼒:⾃重⼒、轨道反⼒、摩擦⼒、惯性⼒;* 摩擦⼒、惯性⼒与电磁铁的电流有关。
(1)I=0时,⽀承弹簧复位,轨道以加速度a1向右上⽅运动,⼯件⼒平衡如图1-41:macosβ+mgsinα=F=µN (2—1)1sinβ+mgcosα=N (2—2)ma1(2)I>0时,电磁铁吸引,轨道以加速度a2向左下⽅运动,⼯件受⼒平衡如图1-42:cosβ-mgsinα=F=µN (2—3)ma2masinβ-mgcosα=-N (2—4)22、⼯件在轨道上的运动状态分析(1)运动分析根据受⼒分析,⼯件在轨道上的运动有两种可能性:A、因惯性沿轨道下滑,此时I=0,且有cosβ+mg sinα>µN (2—5)ma1>g(sinα-µcosα)/(µsinβ-cosβ) (2—6)a1——当轨道向右上⽅运动的加速度a1满⾜上式时,⼯件便会沿轨道下滑。
这对振动上供料机构是不希望出现的。
B、沿轨道上⾏,此时根据电磁铁吸合与否可得:≤g(sinα-µcosα)/(µsinβ-cosβ) (2—7)I=0,a1I>0,a≥g(sinα+µcosα)/(µsinβ+cosβ) (2—8)2——电磁振动供料器要实现预定的上供料,轨道向右上⽅运动的加速度a1和向左下⽅运动的加速度a2必须满⾜上述⼯件沿轨道上⾏时的条件式。
振动盘设计手册
电磁振动上供料器的工作原理在电磁振动器作用下,料斗作扭转式上下振动,使工件沿着螺旋轨道由低到高移动,并自动排列定向,直至上部出料口而进入输料槽,然后由送料机构送至相应工位。
为方便分析,以直槽式上供料器为例,图1-40*电磁振动上供料器的工作过程,是由于电磁铁的吸引和支承弹簧的反向复位作用,使料槽产生高速、高频(50~100次/秒)、微幅(0.5~1mm)振动,使工件逐步向高处移动。
**I=0时,料槽在支承弹簧作用下向右上方复位,工件依靠它与轨道的摩擦而随轨道向右上方运动,并逐渐被加速。
**I>0时,料槽在电磁铁的吸引下向左下方运动,工件由于受惯性作用而脱离轨道,继续向右上方运动(滑移或跳跃)。
……下一循环,周而复始→工件在轨道上作由低到高的运动。
1、工件在轨道上的受力分析* 工件在轨道上的受力:自重力、轨道反力、摩擦力、惯性力;* 摩擦力、惯性力与电磁铁的电流有关。
(1)I=0时,支承弹簧复位,轨道以加速度a1向右上方运动,工件力平衡如图1-41:macosβ+mgsinα=F=μN (2—1)1sinβ+mgcosα=N (2—2)ma1(2)I>0时,电磁铁吸引,轨道以加速度a2向左下方运动,工件受力平衡如图1-42:cosβ-mgsinα=F=μN (2—3)ma2masinβ-mgcosα=-N (2—4)22、工件在轨道上的运动状态分析(1)运动分析根据受力分析,工件在轨道上的运动有两种可能性:A、因惯性沿轨道下滑,此时I=0,且有cosβ+mgsinα>μN (2—5)ma1>g(sinα-μcosα)/(μsinβ-cosβ) (2—6)a1——当轨道向右上方运动的加速度a1满足上式时,工件便会沿轨道下滑。
这对振动上供料机构是不希望出现的。
B、沿轨道上行,此时根据电磁铁吸合与否可得:≤g(sinα-μcosα)/(μsinβ-cosβ) (2—7)I=0,a1I>0,a≥g(sinα+μcosα)/(μsinβ+cosβ) (2—8)2——电磁振动供料器要实现预定的上供料,轨道向右上方运动的加速度a1和向左下方运动的加速度a2必须满足上述工件沿轨道上行时的条件式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电磁振动上供料器的工作原理在电磁振动器作用下,料斗作扭转式上下振动,使工件沿着螺旋轨道由低到高移动,并自动排列定向,直至上部出料口而进入输料槽,然后由送料机构送至相应工位。
为方便分析,以直槽式上供料器为例,图1-40*电磁振动上供料器的工作过程,是由于电磁铁的吸引和支承弹簧的反向复位作用,使料槽产生高速、高频(50~100次/秒)、微幅(0.5~1mm)振动,使工件逐步向高处移动。
**I=0时,料槽在支承弹簧作用下向右上方复位,工件依靠它与轨道的摩擦而随轨道向右上方运动,并逐渐被加速。
**I>0时,料槽在电磁铁的吸引下向左下方运动,工件由于受惯性作用而脱离轨道,继续向右上方运动(滑移或跳跃)。
……下一循环,周而复始→工件在轨道上作由低到高的运动。
1、工件在轨道上的受力分析* 工件在轨道上的受力:自重力、轨道反力、摩擦力、惯性力;* 摩擦力、惯性力与电磁铁的电流有关。
(1)I=0时,支承弹簧复位,轨道以加速度a1向右上方运动,工件力平衡如图1-41:macosβ+mgsinα=F=μN (2—1)1sinβ+mgcosα=N (2—2)ma1(2)I>0时,电磁铁吸引,轨道以加速度a2向左下方运动,工件受力平衡如图1-42:cosβ-mgsinα=F=μN (2—3)ma2masinβ-mgcosα=-N (2—4)22、工件在轨道上的运动状态分析(1)运动分析根据受力分析,工件在轨道上的运动有两种可能性:A、因惯性沿轨道下滑,此时I=0,且有cosβ+mg sinα>μN (2—5)ma1>g(sinα-μcosα)/(μsinβ-cosβ) (2—6)a1——当轨道向右上方运动的加速度a1满足上式时,工件便会沿轨道下滑。
这对振动上供料机构是不希望出现的。
B、沿轨道上行,此时根据电磁铁吸合与否可得:≤g(sinα-μcosα)/(μsinβ-cosβ) (2—7)I=0,a1I>0,a≥g(sinα+μcosα)/(μsinβ+cosβ) (2—8)2——电磁振动供料器要实现预定的上供料,轨道向右上方运动的加速度a1和向左下方运动的加速度a2必须满足上述工件沿轨道上行时的条件式。
工件沿轨道上行时的运动状态随多种条件而变。
(2)运动状态图1-43 工件在料道上的运动状态(a)连续跳跃;(b)断续跳跃;(c)连续滑移;(d)断续滑移注:图示为料槽的两极限位置。
A、连续跳跃*运动过程:I=0、弹簧使料斗复位,工件依靠摩擦、空间位置从A点上行到B点;↓I>0、电磁铁吸合,由于惯性、工件由B点跳跃起来↓(腾空时间≥料斗运行至最下方的时间)I=0、工件再落至轨道上时已到达C点→后又随轨道上行到D点。
↓如此往复,工件“随轨道上行--跳跃--再随轨道上行…”→工件跳跃式前进,跳跃间距为AC段。
* 特点:/工件具有大的供料速度,供料率高;/工件运动平稳性差,对定向不利;/适用于形状简单、定向要求不高的件料及供料速度较大的场合。
* 运行条件:电磁铁吸力、料槽振幅及抛射角较大。
但工件腾空时间过大→料斗复位时工件再落至轨道过晚→A点与C点的间距缩小,甚至落回原处而没有前移。
B、断续跳跃*运动过程:I=0、弹簧使料斗复位,工件依靠摩擦、空间位置从A点上行到B点;↓I>0、电磁铁吸合,由于惯性、工件由B点跳跃起来(腾空时间<料斗运行至最下方的时间)↓→工件很快落至轨道上的C点、并随轨道下行到D点;I=0、工件再随轨道从空间位置D点上行到E点。
↓如此往复,工件“随轨道上行--跳跃后随轨道下行--再随轨道上行…”→工件断续跳跃式前进,跳跃间距为AD段。
* 特点:/工件具有较大的供料速度,供料率较高;/工件运动平稳性一般。
* 运行条件:电磁铁吸力、料槽振幅及抛射角中等。
C、连续滑移*运动过程:I=0、弹簧使料斗复位,工件依靠摩擦、空间位置从A点上行到B点;↓I>0、电磁铁吸合,由于惯性、工件沿轨道由B点滑移↓(滑移时间≥料斗运行至最下方的时间)I=0、工件停下时已滑移至C点→后又随轨道上行。
↓如此往复,工件“随轨道上行--滑移--再随轨道上行…”→工件滑移式前进,滑移间距为AC段。
* 特点:/工件具有较大的供料速度和供料率;/工件运动平稳,利于定向;/适用于形状较规则、有定向要求的件料及供料速度较大的场合。
* 运行条件:电磁铁吸力、料槽振幅及抛射角均较跳跃时的小。
D、断续滑移*运动过程:I=0、弹簧使料斗复位,工件依靠摩擦、空间位置从A点上行到B点;↓I>0、电磁铁吸合,由于惯性、工件沿轨道由B点滑移(滑移时间<料斗运行至最下方的时间)↓→工件很快停在轨道上的B´点、并随轨道下行到C点;I=0、工件再随轨道从空间位置C点上行。
↓如此往复,工件“随轨道上行--滑移后随轨道下行--再随轨道上行…”→工件断续滑移式前进,滑移间距为AC段。
* 特点:/工件供料速度和供料率较小;/工件运动平稳,亦利于定向;/适用于有定向要求但供料速度要求不高的场合。
* 运行条件:电磁铁吸力、料槽振幅及抛射角均小。
综上:设计合理、参数选择恰当→不产生跳跃、平稳滑移、供料较快→首选连续滑移。
3、工件在轨道上滑移和跳跃的条件(1)滑移条件由前分析,工件沿轨道上行滑移的条件a≤g(sinα-μcosα)/(μsinβ-cosβ)1a≥g(sinα+μcosα)/(μsinβ+cosβ)2如取α=2°(常为1~2°),β=20°(常为15~25°),μ=0.41,则a≤0.47g1a≥0.41g2满足一定条件,便所以,只要合理设计,使轨道向左下方运行的加速度a2可获得预定的滑移状态。
(2)跳跃条件工件在惯性力作用下产生跳跃,脱离轨道,此时受力式(2—4)为sinβ-mgcosα=0ma2所以产生跳跃的条件为a≥gcosα/sinβ2同上取α=2°,β=20°,μ=0.41,则有a≤0.47g1a≥2.92g2如将料槽受电磁力作用产生的振动视作简谐振动,其频率为f、振幅为A,则轨道最大加速度a为maxamax=2π²f²A所以,当amax =2π²f²A=a2≥gcosα/sinβ,工件就会产生跳跃式前进。
★由上分析可知,连续跳跃所需加速度a2最大,断续滑移时a2最小。
★圆筒形料斗与直槽形的工作原理、件料运动状态完全相同,但振动形式有区别:直槽形料斗是往复直线式振动,而圆筒形是往复扭转式振动。
振动供料器(振动盘)的设计(一)供料率Q*振动上料器的供料率取决于供料器的给料速度;*给料速度一般用工件在料道上移动的平均速度Vp来估算,它与料槽的倾角α、振动升角β、工件物理特性、电磁振动参数等有关。
*料斗结构确定之后,上料器的供料率为Q=60Vp*设计时,上料器生产率比自动机械的生产率大15%~20%。
(二)料斗设计1、料斗的结构设计料斗的结构多样,大多采用圆筒形结构,图1-44。
▲料斗筒体与轨道——一般料斗:筒体与螺旋轨道采用整体结构(车制轨道或整体铸造)。
大型料斗:常采用拼焊结构形式。
轨道的工作面一般与料斗内壁成直角,有时向上倾斜5°~10°。
▲料斗筒体与筒底(料斗底盘)——一般分别加工,再用螺钉连接(是由于工艺原因);筒体与筒底的连接须注意同心度和牢靠;筒底上部一般做成锥形(锥角160°~170°)。
料斗底盘与衔铁之间应装有隔磁板(铜或铝材),或用隔磁材料做底盘。
▲轨道及其出口——轨道最上部的出料口应以切线方向伸出一段距离。
出料口与输料槽的连接方法有对接法和承接法,且出料口(振动)与输料槽(静止)之间应留有间隙δ(如图1-45)。
▲料斗的零件材料选用——料斗应尽量做得轻巧→系统易起振。
重量轻、易加工、表面光洁,耐磨损、隔磁,成本低。
常用材料有:不锈钢——表面光洁、耐磨,但加工困难、成本高、比重大;铝合金——质轻、不会磁化,但表面不光;铜合金——加工方便、不会磁化,但比重也较大;硬塑料或有机玻璃——都较轻、表面光洁,但耐磨性较差。
2、振动料斗中工件定向方法*电磁振动上供料器中的单件在进入加工工位前,要求沿料道自下而上,并自动排列、定向。
*自动定向常采用剔除法——根据工件形状、重心,在轨道上安置挡块、缺口、斜面、槽子等,以使不符合定向的工件被矫正或剔除,而符合定向的工件顺利通过,从而实现自动排列、定向。
3、料斗的尺寸计算A、料斗的螺旋升角α*α由升程及中径小决定:α越小→工件平均速度就高/但升程减小→料道螺旋圈数增加→料斗尺寸增大。
α太大→工件上料速度降低,甚至无法向上滑移。
*根据工件上行滑移的临界条件(a1<a2)可得tgα<μ²tgβ 或α<tg-1(μ²tgβ)max式中:μ——工件与料道间的摩擦系数;β——振动升角,工件抛射角。
★ 料斗的螺旋升角α与工件抛射角β及工件与料道间的摩擦系数μ有关(表1-3)。
B、料斗的直径料斗内径DH ——常取DH≥(8~10)l工 (mm),(l工为工件最大外形尺寸,DH-l工见表1-4)料斗外径De ——De=DH+2e (mm),(e为筒体壁厚,一般取e=5~10mm)料斗平均直径Dp ——Dp=DH-B (mm),(B为料道宽度,B=b+Δb,b为工件直径或宽度,Δb为余量:1~3mm)C、料斗的螺距tt=πDp·tgα (mm)又根据结构要求t≥1.5h+δ (mm)(h-工件直径或高度,δ-料道厚度:4~8mm)D、料斗的高度HH=nt (mm) (n-螺旋料道的圈数:1.5~3.5)考虑到料斗外观匀称,应使 H=(1/4~1/2)D 。
(三)振动升角(工件抛射角)的确定·振动升角β由主振弹簧的安装角ψ及料道升角α确定。
·β的大小直接影响作用在工件上的惯性力,要选择合理:β选得太小——影响工件移动速度、所需电磁力增加;β选得太大——工件不易前进或只会上抛。
·根据受力分析可得:tgβ=μ,β-μ关系见表1-5。
(四)支承弹簧的设计计算»支承弹簧的作用:电磁振动供料器的料斗通过其安装在基座上。
»圆筒形料斗一般采用三根弹簧支承。
»支承弹簧的截面有矩形和圆形:矩形截面的称为板弹簧——宽度和厚度常不一致,其刚度在不同方向上差别较大,故安装要求较高,支座形式如图1-46a。
圆形截面的称为圆弹簧——圆柱弹簧杆加工容易,各向刚度一致,故安装调整方便,支座形式如图1-46b。
»支承弹簧的安装角ψ——支承弹簧处于静止时与垂直面的夹角。
·是保证工件获得抛射角β的结构性措施;·是影响工件在料道上的运动状态和供料速度的重要几何参数;·ψ与β和α及弹簧固结点有关:1)当弹簧固结点处在料斗中径圆上的A点,即OA=R,则弹簧安装角ψ与直槽形料斗相同,ψ=β+α;(2)对大型料斗(D≥500mm),为减少基座尺寸,则将固结点设在半径r处, tgψ=R/rtg(β+α)→ψ=arctg[R/rtg(β+α)]R——料道中径圆半径;r——弹簧固结点分布圆半径。