超声波测距仪外文资料翻译
超声波测距仪外文翻译
H8/300L超声波测距仪(原文出处:第1页-第15页)介绍该应用说明介绍了一种使用H8/38024 SLP MCU的测距仪。
由单片机产生40KHz 方波,通过超声波传感器发射出去。
反射的超声波被另外一个传感器接收。
有效距离为6cm到200cm。
1.理论1.1概况在这篇应用说明中,H8/38024F微处理器是作为目标设备被使用的。
由于简单的可移植性,超声波测距仪使用的软件为C语言。
超声波是频率高于可听音的一切高于20kHz的声波。
用于医疗诊断和影像的超声波,频率延长和超过了10兆赫兹,高的频率有短的波长,这使得超声波从物体反射回来更容易。
不幸的是,极高的频率难以产生和测量。
对超声波的检测与测量主要是通过压电式接收机进行的。
超音波普遍应用于防盗系统、运动探测器和车载测距仪。
其他应用包括医疗诊断(人体成像),清洁(去除油脂和污垢),流量计(利用多普勒效应),非破坏性试验(检测材料缺陷),焊接等各个方面。
1.2软件实施距离的计算要测量超声波传感器接收到回波的时间。
理想的被测对象应该有一个大的面积而且不吸收超声波。
在这个应用说明中使用了38024f的CPU电路板。
图1展示超声波测距仪的工作原理,tmofh (脚63 )是用来传送0.5ms的40kHz的超声波,irq0 ( pin72 ) 是用来探测反射波的。
发送超声波后,计时器C开始追踪Timer Counter C (TCC)的计数数目,以计算物体的距离。
图1.测距仪工作原理1.2.1 发射超声波定时器F是一个具有内置式输出比较功能16位计数器,它还可以用来作为两个独立的8位定时器FH和FL,这里,定时器F是作为两个独立的8位定时器使用。
计时器的FL被初始化为产生中断,而FH在比较匹配发生时触发了tmofh的输出电平。
表1 计时器F的时钟选择对于为定时器的FL,选定内部时钟ø/32。
输出比较寄存器FL装载数据初值为H’FF 。
因此,外部定时器每1.67msec 产生一个中断,计算如下:/2ø晶振频率=,计时器FL 内部时钟周期=322⨯晶振频率=64MHz 8304.9=153.6kHz 中断周期=256kHz6.1531⨯=1.67msec 每隔65msec 开始发射一次超声波,计时器FL 须中断近39次( 65msec / 1.67msec = 39 ),才开始传送。
中英文超声无损检测名词术语

中英文超声无损检测名词术语Acceptance limits 验收范围Acceptance level 验收水平Acceptance standard 验收标准Accumulation test 累积检测Acoustic emission transducer 声发射换能器(声发射传感器)Acoustic impedance 声阻抗Acoustic impedance matching 声阻抗匹配Acoustic impedance method 声阻法Acoustic wave 声波Acoustical lens 声透镜Acoustic —ultrasonic 声-超声(AU )Adequate shielding 安全屏蔽Amplitude 幅度Angle beam method 斜射法Angle of incidence 入射角Angle of reflection 反射角Angle of spread 指向角Angle of squint 偏向角Angle probe 斜探头Area amplitude response curve 面积幅度曲线Area of interest 评定区Artificial discontinuity 人工不连续性Artifact 假缺陷Artificial defect 人工缺陷Artificial discontinuity 标准人工缺陷A-scan A 型扫描A-scope; A-scan A 型显示Attenuation coefficient 衰减系数Attenuator 衰减器Automatic testing 自动检测Evaluation 评定Beam 声束Beam ratio 光束比Beam angle 束张角Beam axis 声束轴线Beam index 声束入射点Beam path location 声程定位Beam path; path length 声程Beam spread 声束扩散Bottom echo 底面回波Bottom surface 底面Boundary echo(first)边界一次回波Broad-beam condition 宽射束B-scan presentation B 型扫描显示B-scope; B-scan B 型显示C- scan C 型扫描Calibration, instrument 设备校准Compressional wave 压缩波Continuous emission 连续发射microstructure Continuous linear array 连续线阵Continuous method 连续法Continuous spectrum 连续谱Continuous wave 连续波Contract stretch 对比度宽限Contrast 对比度Contrast sensitivity 对比灵敏度Control echo 监视回波Control echo 参考回波Couplant 耦合剂Coupling 耦合Coupling losses 耦合损失Creeping wave 爬波Critical angle 临界角Cross section 横截面Cross talk 串音Cross-drilled hole 横孔Crystal 晶片C-scope; C-scan C 型显示Curie point 居里点Curie temperature 居里温度Curie(Ci) 居里Dead zone 盲区Decibel(dB) 分贝Defect 缺陷Defect resolution 缺陷分辨力Defect detection sensitivity 缺陷检出灵敏度Definition 清晰度Definition ,image definition 清晰度,图像清晰度Direct contact method 直接接触法Directivity 指向性Discontinuity 不连续性Distance- gain- size -German AVG 距离- 增益- 尺寸( DGS 德文为AVG) Distance marker; time marker 距离刻度Double crystal probe 双晶片探头Double probe technique 双探头法Double transceiver technique 双发双收法Double traverse technique 二次波法D-scope; D-scan D 型显示Dual search unit 双探头Dynamic range 动态范围Echo 回波Echo frequency 回波频率Echo height 回波高度Echo indication 回波指示Echo transmittance of sound pressure 往复透过率Echo width 回波宽度Equivalent 当量Equivalent method 当量法Evaluation 评定Examination area 检测范围Examination region 检验区域Final test 复探Flat-bottomed hole 平底孔Flat-bottomed hole equivalent 平底孔当量Flaw 伤Flaw characterization 伤特性Flaw echo 缺陷回波Flexural wave 弯曲波Focal spot 焦点Focal distance 焦距Focus length 焦点长度Focus size 焦点尺寸Focus width 焦点宽度Focused beam 聚焦声束Focusing probe 聚焦探头Focus-to-film distance(f.f.d) 焦点- 胶片距离(焦距) Frequency 频率Frequency constant 频率常数Fringe 干涉带Front distance 前沿距离Front distance of flaw 缺陷前沿距离Fundamental frequency 基频Gain 增益Gap scanning 间隙扫查Gate 闸门Gating technique 选通技术Gauss 高斯Grazing incidence 掠入射Grazing angle 掠射角Group velocity 群速度Half life 半衰期Half-value method 半波高度法Harmonic analysis 谐波分析Harmonics 谐频Head wave 头波Image definition 图像清晰度Image contrast 图像对比度Image enhancement 图像增强Image magnification 图像放大Image quality 图像质量Imaging line scanner 图像线扫描器Immersion probe 液浸探头Immersion rinse 浸没清洗Immersion testing 液浸法Impedance 阻抗Impedance plane diagram 阻抗平面图Imperfection 不完整性Indicated defect area 缺陷指示面积Indicated defect length 缺陷指示长度Indication 指示Initial pulse 始脉冲Initial pulse width 始波宽度Inspection 检查Inspection medium 检查介质Inspection frequency/ test frequency 检测频率Interface boundary 界面Interface echo 界面回波Interface trigger 界面触发Interference 干涉Interpretation 解释Lamb wave 兰姆波Lateral scan 左右扫查Lateral scan with oblique angle 斜平行扫查Limiting resolution 极限分辨率Line scanner 线扫描器Linear scan 线扫查Location 定位Location accuracy 定位精度Location computed 定位,计算Location marker 定位标记Longitudinal wave 纵波Longitudinal wave probe 纵波探头Longitudinal wave technique 纵波法Loss of back reflection 背面反射损失Loss of back reflection 底面反射损失Magnetostrictive effect 磁致伸缩效应Magnetostrictive transducer 磁致伸缩换能器Main beam 主声束Manual testing 手动检测MA-scope; MA-scan MA 型显示Micrometre 微米Micron of mercury 微米汞柱Mode 波型Mode conversion 波型转换Mode transformation 波型转换Multiple back reflections 多次背面反射Multiple reflections 多次反射Multiple back reflections 多次底面反射Multiple echo method 多次反射法Multiple probe technique 多探头法Multiple triangular array 多三角形阵列Narrow beam condition 窄射束Near field 近场Near field length 近场长度Near surface defect 近表面缺陷Noise 噪声Nominal angle 标称角度Nominal frequency 标称频率Nondestructive Examination (NDE )无损试验Nondestructive Evaluation (NDE )无损评价Nondestructive Inspection (NDI )无损检验Nondestructive Testing (NDT )无损检测Normal incidence 垂直入射(亦见直射声束)Normal beam method; straight beam method 垂直法Normal probe 直探头Parallel scan 平行扫查Parasitic echo 干扰回波Pattern 探伤图形Penetrant flaw detection 渗透探伤Phantom echo 幻象回波Phase detection 相位检测Plane wave 平面波Plate wave 板波Plate wave technique 板波法Point source 点源Probe test 探头检测Probe index 探头入射点Probe to weld distance 探头-焊缝距离Probe/ search unit 探头Pulse 脉冲波Pulse 脉冲Pulse echo method 脉冲回波法Pulse repetition rate 脉冲重复率Pulse amplitude 脉冲幅度Pulse echo method 脉冲反射法Pulse energy 脉冲能量Pulse envelope 脉冲包络Pulse length 脉冲长度Pulse repetition frequency 脉冲重复频率Pulse tuning 脉冲调谐Quadruple traverse technique 四次波法Range 量程Rayleigh wave 瑞利波Rayleigh scattering 瑞利散射Reference block 参考试块Reference block 对比试块Reference block method 对比试块法Reference standard 参考标准Reflection 反射Reflection coefficient 反射系数Reflector 反射体Refraction 折射Refractive index 折射率Reject; suppression 抑制Rejection level 拒收水平Resolution 分辨力Sampling probe 取样探头Saturation 饱和Saturation,magnetic 磁饱和Scan on grid lines 格子线扫查Scan pitch 扫查间距Scanning 扫查Scanning index 扫查标记Scanning directly on the weld 焊缝上扫查Scanning path 扫查轨迹Scanning sensitivity 扫查灵敏度Scanning speed 扫查速度Scanning zone 扫查区域SE probe SE 探头Second critical angle 第二临界角Sensitivity va1ue 灵敏度值Sensitivity 灵敏度Sensitivity of leak test 泄漏检测灵敏度Sensitivity control 灵敏度控制Shear wave 切变波Shear wave probe 横波探头Shear wave technique 横波法Signal to noise ratio 信噪比Single crystal probe 单晶片探头Single probe technique 单探头法Single traverse technique 一次波法Sizing technique 定量法Sound diffraction 声绕射Sound insulating layer 隔声层Sound intensity 声强Sound intensity level 声强级Sound pressure 声压Sound scattering 声散射Sound transparent layer 透声层Sound velocity 声速Source 源Specified sensitivity 规定灵敏度Standard 标准Standard 标准试样Standard test block 标准试块Standardization instrument 设备标准化Standing wave; stationary wave 驻波Subsurface discontinuity 近表面不连续性Suppression 抑制Surface echo 表面回波Surface wave 表面波Surface wave probe 表面波探头Surface wave technique 表面波法Surplus sensitivity 灵敏度余量Sweep 扫描Sweep range 扫描范围Sweep speed 扫描速度Swept gain 扫描增益Swivel scan 环绕扫查System exanlillatien threshold 系统检验阈值System noise 系统噪声Tandem scan 串列扫查Test block 试块Test frequency 试验频率Test range 探测范围Test surface 探测面Testing,ultrasonic 超声检测Third critical angle 第三临界角Through transmission technique 穿透技术Through penetration technique 贯穿渗透法Through transmission technique; transmission technique 穿透法Transducer 换能器/ 传感器Transmission 透射Transverse wave 横波Traveling echo 游动回波Travering scan; depth scan 前后扫查Triangular array 正三角形阵列Trigger/alarm condition 触发/ 报警状态Trigger/alarm level 触发/ 报警标准Triple traverse technique 三次波法True continuous technique 准确连续法技术Ultrasonic noise level 超声噪声电平Ultrasonic field 超声场Ultrasonic flaw detection 超声探伤Ultrasonic flaw detector 超声探伤仪Variable angle probe 可变角探头Vertical linearity 垂直线性Vertical location 垂直定位Visible light 可见光Wave 波Wave train 波列Wave from 波形Wave front 波前Wave length 波长Wave node 波节Wave train 波列Wedge 斜楔Wheel type probe; wheel search unit 轮式探头Working sensitivity 探伤灵敏度Zigzag scan 锯齿扫查。
激光测距仪外文翻译

Laser rangefinderA long range laser rangefinder is capable of measuring distance up to 20 km; mounted on a tripod with an angular mount. The resulting system also provides azimuth and elevation measurements.A laser rangefinder is a device which uses a laser beam to determine the distance to an object. The most common form of laser rangefinder operates on the time of flight principle by sending a laser pulse in a narrow beam towards the object and measuring the time taken by the pulse to be reflected off the target and returned to the sender. Due to the high speed of light, this technique is not appropriate for high precision sub-millimeter measurements, where triangulation and other techniques are often used.PulseThe pulse may be coded to reduce the chance that the rangefinder can be jammed. It is possible to use Doppler effect techniques to judge whether the object is moving towards or away from the rangefinder, and if so how fast.PrecisionThe precision of the instrument is determined by the rise or fall time of the laser pulse and the speed of the receiver. One that uses very sharp laser pulses and has a very fast detector can range an object to within a few millimeters.RangeDespite the beam being narrow, it will eventually spread over long distances due to the divergence of the laser beam, as well as due to scintillation and beam wander effects, caused by the presence of air bubbles in the air acting as lenses ranging in size from microscopic to roughly half the height of the laser beam's path above the earth. These atmospheric distortions coupled with the divergence of the laser itself and with transverse winds that serve to push the atmospheric heat bubbles laterally may combine to make it difficult to get an accurate reading of the distance of an object, say, beneath some trees or behind bushes, or even over long distances of more than 1 km in open and unobscured desert terrain.Some of the laser light might reflect off leaves or branches which are closer thanthe object, giving an early return and a reading which is too low. Alternatively, over distances longer than 1200 ft (365 m), the target, if in proximity to the earth, may simply vanish into a mirage, caused by temperature gradients in the air in proximity to the heated surface bending the laser light. All these effects have to be taken into account.CalculationThe distance between point A and B is given byD=ct/2where c is the speed of light in the atmosphere and t is the amount of time for the round-trip between A and B.where is the delay which made by the light traveling and is the angular frequency of optical modulation.Then substitute the values in the equation D=ct/2,D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ)=c/4f (N+ΔN)=U(N+)in this equation, U stands for the unit length.Δφ stands for the delay part which does not fulfill π.ΔN stands the decimal value.DiscriminationSome instruments are able to determine multiple returns, as above. These instruments use waveform-resolving detectors, which means they detect the amount of light returned over a certain time, usually very short. The waveform from a laser pulse that hits a tree and then the ground would have two peaks. The first peak would be the distance to the tree, and the second would be the distance to the ground.Using wavefront sensing, it is possible to determine both the closest and the farthest object at a given point. This makes it possible for aircraft-mounted instruments to see "through" dense canopies[clarification needed Please explain how lasers see through canopies]and other semi-reflective surface such as the ocean, leading to many applications for airborne instruments such as:1. Creating "bare earth" topographic maps - removing all trees2. Creating vegetation thickness maps3. Bathymetry(measuring topography under the ocean)4. Forest firehazardTechnologiesTime of flight - this measures the time taken for a light pulse to travel to the target and back. With the speed of light known, and an accurate measurement of the time taken, the distance can be calculated. Many pulses are fired sequentially and the average response is most commonly used. This technique requires very accurate sub-nanosecond timing circuitry.Multiple frequency phase-shift- this measures the phase shift of multiple frequencies on reflection then solves some simultaneous equations to give a final measure.Interferometry - the most accurate and most useful technique for measuring changes in distance rather than absolute distances.ApplicationsMilitaryAn American soldier with a GVS-5 laser rangefinder.A Dutch ISAF sniper team displaying their Accuracy International AWSM .338 Lapua Magnum rifle and Leica/Vectronix VECTOR IV laser rangefinder binoculars. Rangefinders provide an exact distance to targets located beyond the distance of point-blank shooting to snipers and artillery. They can also be used for military reconciliation and engineering.Handheld military rangefinders operate at ranges of 2 km up to 25 km and are combined with binoculars or monoculars. When the rangefinder is equipped with a digital magnetic compass (DMC) and inclinometer it is capable of providing magnetic azimuth, inclination, and height (length) of targets. Some rangefinders can also measure a target's speed in relation to the observer. Some rangefinders have cable or wireless interfaces to enable them to transfer their measurement(s) data to other equipment like fire control computers. Some models also offer the possibility to use add-on night vision modules. Most handheld rangefinders use standard or rechargeable batteries.The more powerful models of rangefinders measure distance up to 25 km and arenormally installed either on a tripod or directly on a vehicle or gun platform. In the latter case the rangefinder module is integrated with on-board thermal, night vision and daytime observation equipment. The most advanced military rangefinders can be integrated with computers.To make laser rangefinders and laser-guided weapons less useful against military targets, various military arms may have developed laser-absorbing paint for their vehicles. Regardless, some objects don't reflect laser light very well and using a laser rangefinder on them is difficult.3-D ModellingThis LIDAR scanner may be used to scan buildings, rock formations, etc., to produce a 3D model. The LIDAR can aim its laser beam in a wide range: its head rotates horizontally, a mirror flips vertically. The laser beam is used to measure the distance to the first object on its path.Laser rangefinders are used extensively in 3-D object recognition, 3-D object modelling, and a wide variety of computer vision-related fields. This technology constitutes the heart of the so-called time-of-flight3D scanners. In contrast to the military instruments described above, laser rangefinders offer high-precision scanning abilities, with either single-face or 360-degree scanning modes.A number of algorithms have been developed to merge the range data retrieved from multiple angles of a single object to produce complete 3-D models with as little error as possible. One of the advantages that laser rangefinders offer over other methods of computer vision is that the computer does not need to correlate features from two images to determine depth information as in stereoscopic methods.Laser rangefinders used in computer vision applications often have depth resolutions of tenths of millimeters or less. This can be achieved by using triangulation or refraction measurement techniques as opposed to the time of flight techniques used in LIDAR.ForestryLaser rangefinder TruPulse used for forest inventories (in combination with Field-Map technology)Special laser rangefinders are used in forestry. These devices have anti-leaf filtersand work with reflectors. Laser beam reflects only from this reflector and so exact distance measurement is guaranteed. Laser rangefinders with anti-leaf filter are used for example for forest inventories.SportsLaser rangefinders may be effectively used in various sports that require precision distance measurement, such as golf, hunting, and archery. Some of the more popular manufacturers are: Opti-logic Corporation, Bushnell, LaserTechnology, Trimble, Leica, Newcon Optik, Nikon, and Swarovski Optik.Industry production processesAn important application is the use of laser Range finder technology during the automation of stock management systems and production processes in steel industry.SafetyLaser rangefinders for consumers are laser class 1 devices and therefore are considered eyesafe. Some laser rangefinders for military use exceed the laser class 1 energy levels.HistoryDevelopment of the methods used in modern printed circuit boards started early in the 20th century. In 1903, a German inventor, Albert Hanson, described flat foil conductors laminated to an insulating board, in multiple layers. Thomas Edison experimented with chemical methods of plating conductors onto linen paper in 1904. Arthur Berry in 1913 patented a print-and-etch method in Britain, and in the United States Max Schoop obtained a patent[1] to flame-spray metal onto a board through a patterned mask. Charles Durcase in 1927 patented a method of electroplating circuit patterns.The Austrian Jewish engineer Paul Eisler invented the printed circuit while working in England around 1936 as part of a radio set. Around 1943 the USA began to use the technology on a large scale to make proximity fuses for use in World War II . After the war, in 1948, the USA released the invention for commercial use. Printed circuits did not become commonplace in consumer electronics until the mid-1950s, after the Auto-Sembly process was developed by the United States Army.Before printed circuits (and for a while after their invention), point-to-point construction was used. For prototypes, or small production runs, wire wrap or turret board can be more efficient. Predating the printed circuit invention, and similar in spirit, was John Sargrove's 1936–1947 Electronic Circuit Making Equipment (ECME) which sprayed metal onto a Bakelite plastic board. The ECME could produce 3 radios per minute.During World War II, the development of the anti-aircraft proximity fuse required an electronic circuit that could withstand being fired from a gun, and could be produced in quantity. The Centralab Division of Globe Union submitted a proposal which met the requirements: a ceramic plate would be screenprinted with metallic paint for conductors and carbon material for resistors, with ceramic disc capacitors and subminiature vacuum tubes soldered in place.Originally, every electronic component had wire leads, and the PCB had holes drilled for each wire of each component. The components' leads were then passed through the holes and soldered to the PCB trace. This method of assembly is called through-hole construction. In 1949, Moe Abramson and Stanislaus F. Danko of the United States Army Signal Corps developed the Auto-Sembly process in which component leads were inserted into a copper foil interconnection pattern and dip soldered. The patent they obtained in 1956 was assigned to the U.S. Army. [4] With the development of board lamination and etching techniques, this concept evolved into the standard printed circuit board fabrication process in use today. Soldering could be done automatically by passing the board over a ripple, or wave, of molten solder in a wave-soldering machine. However, the wires and holes are wasteful since drilling holes is expensive and the protruding wires are merely cut off.In recent years, the use of surface mount parts has gained popularity as the demand for smaller electronics packaging and greater functionality has grown.激光测距仪激光测距仪是一种设备,它采用了激光束来确定对象的距离。
单片机-外文翻译-外文文献-英文文献-基于单片机的超声波测距系统的研究与设计

附录附录A外文翻译the equivalent dc value. In the analysis of electronic circuits to be considered in a later course, both dc and ac sources of voltage will be applied to the same network. It will then be necessary to know or determine the dc (or average value) and ac components of the voltage or current in various parts of the system.EXAMPLE13.13Determine the average value of the waveforms of Fig.13.37.FIG.13.37Example 13.13.Solutions:a. By inspection, the area above the axis equals the area below over one cycle, resulting in an average value of zero volts.b. Using Eq.(13.26):as shown in Fig. 13.38.In reality, the waveform of Fig. 13.37(b) is simply the square wave of Fig. 13.37(a) with a dc shift of 4 V;that is v2 v1+4 VEXAMPLE 13.14 Find the average values of the following waveforms over one full cycle:a.Fig.13.39.b. Fig.13.40.Solutions:We found the areas under the curves in the preceding example by using a simple geometric formula. If we should encounter a sine wave or any other unusual shape, however, we must find the area by some other means. We can obtain a good approximation of the area by attempting to reproduce the original wave shape using a number of small rectangles or other familiar shapes, the area of which we already know through simple geometric formulas.For example,the area of the positive(or negative)pulse of a sine wave is 2Am.Approximating this waveform by two triangles (Fig. 13.43), we obtain(using area1/2 base height for the area of a triangle)a rough idea of the actual area:A closer approximation might be a rectangle with two similar triangles(Fig.13.44):which is certainly close to the actual area. If an infinite number of forms were used, an exact answer of 2Am could be obtained. For irregular waveforms,this method can be especially useful if data such as the average value are desired. The procedure of calculus that gives the exact solution 2Am is known as integration. Integration is presented here only to make the method recognizable to the reader; it is not necessary to be proficient in its use to continue with this text. It is a useful mathematical tool, however,and should be learned. Finding the area under the positive pulse of a sine wave using integration,we havewhere ∫ is the sign of integration, 0 and p are the limits of integration, Am sin a is the function to be integrated, and d a indicates that we are integrating with respect to a. Integrating,we obtainSince we know the area under the positive (or negative) pulse, we can easily determine the average value of the positive (or negative) region of a sine wave pulse by applying Eq.(13.26):For the waveform of Fig.13.45,EXAMPLE 13.15 Determine the average value of the sinusoidal waveform of Fig.13.46.Solution:By inspection it is fairly obvious thatthe average value of a pure sinusoidal waveform over one full cycle iszero.EXAMPLE13.16Determine the average value of the waveform of Fig. 13.47.Solution:The peak-to-peak value of the sinusoidal function is16 mV +2 mVmV. The peak amplitude of the sinusoidal waveform is, therefore, 18 mV/2 mV. Counting down 9 mV from 2 mV(or 9 mV up from -16 mV) results in an average or dc level of-7 mV,as noted by the dashed line of Fig.13.47.EXAMPLE13.17Determine the average value of the waveform of Fig. 13.48.Solution:EXAMPLE 13.18 For the waveform of Fig. 13.49, determine whether the average value is positive or negative,and determine its approximate value.S olution: From the appearance of the waveform, the average value is positive and in the vicinity of 2mV.Occasionally,judgments of this type will have to be made. InstrumentationThe dc level or average value of any waveform can be found using a digital multimeter (DMM) or an oscilloscope. For purely dc circuits,simply set the DMM on dc, and read the voltage or current levels.Oscilloscopes are limited to voltage levels using the sequence of steps listed below:1. First choose GND from the DC-GND-AC option list associated with each vertical channel. The GND option blocks any signal to which the oscilloscope probe may be connected from entering the oscilloscope and responds with just a horizontal line. Set the resulting line in the middle of the vertical axis on the horizontal axis, as shown in Fig.13.50(a).2. Apply the oscilloscope probe to the voltage to be measured(if not already connected), and switch to the DC option. If a dc voltage is present, the horizontal line will shift up or down, as demonstrated in Fig. 13.50(b). Multiplying the shift by the vertical sensitivity will result in the dc voltage. An upward shift is a positive voltage (higher potential at the red or positive lead of the oscilloscope), while a downward shift is a negative voltage (lower potential at the red or positive lead of the oscilloscope).In general,ing the GND option,reset the horizontal line to the middle of the screen.2.Switch to AC (all dc components of the signal to which the probe is connected will be blocked from entering the oscilloscope—only the alternating, or changing, components will be displayed).Note the location of some definitive point on the waveform, such as the bottom of the half-wave rectified waveform of Fig. 13.51(a); that is, note its position on the vertical scale.For the future, whenever you use the AC option,keep in mind that the computer will distribute the waveform above and below the horizontal axis such that the average value is zero;that is, the area above the axis will equal the area below.3. Then switch to DC (to permit both the dc and the ac components of the waveform to enter the oscilloscope), and note the shift in the chosen level of part 2, as shown in Fig.13.51(b).Equation(13.29) can then be used to determine the dc or average value of the waveform. For the waveform of Fig. 13.51(b),the average value is aboutThe procedure outlined above can be applied to any alternating waveform such as the one in Fig. 13.49. In some cases the average value may require moving the starting position of the waveform under the AC option to a different region of the screen or choosing a higher voltage scale. DMMs can read the average or dc level of any waveform by simply choosing the appropriate scale.13.7 EFFECTIVE(rms) VALUESThis section will begin to relate dc and ac quantities with respect to the power delivered to a load. It will help us determine the amplitude of a sinusoidal ac current required to deliver the same power as a particular dc current. The question frequently arises, How is it possible for a sinusoidal ac quantity to deliver a net power if, over a full cycle, the net current in any one direction is zero(average value It would almost appear that the power delivered during the positive portion of the sinusoidal waveform is withdrawn during the negative portion, and since the two are equal in magnitude, the net power delivered is zero. However,understand that irrespective of direction, current of any magnitude through a resistor will deliver power to that resistor. In other words, during the positive or negative portions of a sinusoidal ac current, power is being delivered at eachinstant of time to the resistor. The power delivered at each instant will, of course, vary with the magnitude of the sinusoidal ac current, but there will be a net flow during either the positive or the negative pulses with a net flow over the full cycle. The net power flow will equal twice that delivered by either the positive or the negative regions of sinusoidal quantity. A fixed relationship between ac and dc voltages and currents can be derived from the experimental setup shown in Fig. 13.52. A resistor in a water bath is connected by switches to a dc and an ac supply. If switch 1 is closed, a dc current I, determined by the resistance R and battery voltage E, will be established through the resistor R. The temperature reached by the water is determined by the dc power dissipated in the form of heat by the resistor.If switch 2 is closed and switch1 left open, the ac current through the resistor will have a peak value of Im. The temperature reached by the water is now determined by the ac power dissipated in the form of heat by the resistor. The ac input is varied until the temperature is the same as that reached with the dc input. When this is accomplished, the average electrical power delivered to the resistor R by the ac source is the same as that delivered by the dc source. The power delivered by the ac supply at any instant of time isThe average power delivered by the ac source is just the first term, since the average value of a cosine wave is zero even though the wave may have twice the frequency of the original input current waveform.Equating the average power delivered by the ac generator to that delivered by the dc source,which,in words, states thatthe equivalent dc value of a sinusoidal current or voltage is 1/2 or 0.707 of its maximum value.The equivalent dc value is called the effective value of the sinusoidal quantity.In summary,As a simple numerical example, it would require an ac current with a peak value of14.14 A to deliver the same power to the resistor in Fig. 13.52 as a dc current of 10 A. The effective value of any quantity plotted as a function of time can be found by using the following equation derived from the experiment just described:which, in words, states that to find the effective value, the function i(t) must first be squared. After i(t) is squared,the area under the curve isfound by integration. It is then divided by T, the length of the cycle or the period of the waveform, to obtain the average or mean value of thesquared waveform. The final step is to take the square root of the meanvalue.This procedure gives us another designation for the effectivevalue, the root-mean-square(rms) value. In fact, since the rms term isthe most commonly used in the educational and industrial communities,it will used throughout this text.EXAMPLE13.19 Find the rms values of the sinusoidal waveform in each part of Fig.13.53.Solution:For part (a), I rms 0.707(1210 3 A) 8.484 mA.For part (b), again I rms 8.484 mA. Note that frequency did notchange the effective value in (b) above compared to (a).For part(c),V rms 0.707(169.73V) 120 V,the same as available from a home outlet. EXAMPLE 13.20 The 120-V dc source of Fig. 13.54(a) delivers 3.6 W to the load. Determine the peak value of the applied voltage (Em) and the current (Im) if the ac source[Fig.13.54(b)]is to deliver the same power to the load.Solution:EXAMPLE13.21Find the effective or rms value of the waveform of Fig. 13.55.Solution:EXAMPLE13.22Calculate the rms value of the voltage of Fig.13.57. Solution:EXAMPLE 13.23 Determine the average and rms values of the square wave of Fig.13.59.Solution:By inspection,the average value is zero.The waveforms appearing in these examples are the same as thoseused in theexamples on the average value. It might prove interesting tocompare the rms and average values of these waveforms.The rms values of sinusoidal quantities such as voltage or currentwill be represented by E and I. These symbols are the same as thoseused for dc voltages and currents. To avoid confusion,the peak valueof a waveform will always have a subscript m associated with it: Im sin q t. Caution: When finding the rms value of the positive pulse of asine wave, note that the squared area is not simply (2Am)24A2m; itmust be found by a completely new integration. This will always bethe case for any waveform that is not rectangular.A unique situation arises if a waveform has both a dc and an ac componentthat may be due to a source such as the one in Fig. 13.61. Thecombination appears frequently in the analysis of electronic networkswhere both dc and ac levels are present in the same system.The question arises, What is the rms value of the voltage vT? Onemight be tempted to simply assume that it is the sum of the rms valuesof each component of the waveform; that is, VT rms 0.7071(1.5 V) 6 V 1.06 V 6 V 7.06 V. However,the rms value is actuallydetermined bywhich for the above example is直流值相等。
检测仪器中英文对照表
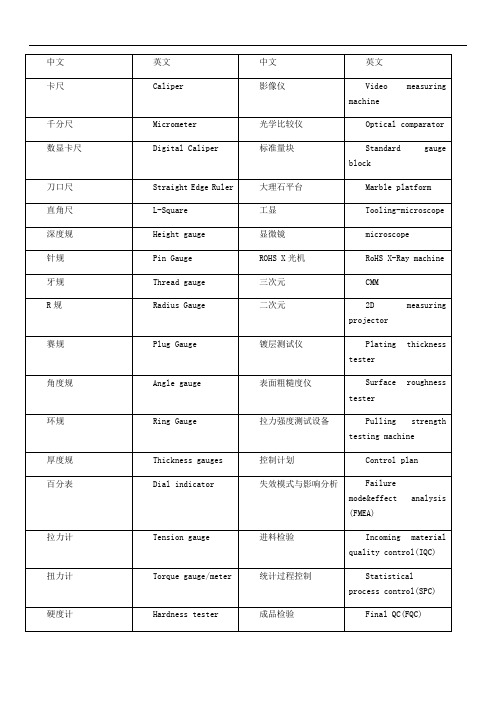
Telescope gauge
仪器分辨力
instrument resolution
触针
stylus
量程分辨力比
range-to-resolution ratio
直角尺
Square master
赛规
Plug Gauge
镀层测试仪
Plating thickness tester
角度规
Angle gauge
表面粗糙度仪
Surface roughness tester
环规
Ring Gauge
拉力强度测试设备
Pulling strength testing machine
厚度规
Thickness gauges
制成检验
IN-Process qualitycontrol(IPQC)
色差仪
Color difference meter
三棱尺
three edges straigjht edge
水位仪
Water level
四棱尺
four edges straigjht edge
水平仪
Level ruler
条式和框式水平仪
拾取单元
Tracing element
压力计
Pressure gauge
针尖
Stylus tip
电子卡尺
Digital caliper
转换器
transducer
深度千分尺
Depth gauge
放大器
amplifier
投影仪
projector
模/数转换器
Anolog-to-digital converter
统计过程控制
超声测距相关毕业设计外文资料翻译

毕业设计(论文)外文资料翻译系(院):电子与电气工程学院专业:电气工程及其自动化姓名:学号:外文出处:United States Patent 5442592(用外文写)附件: 1.外文资料翻译译文;2.外文原文。
指导教师评语:签名:(手写签名)年月日注:请将该封面与附件装订成册。
外文资料翻译译文超声波测距仪文件类型和数目:美国专利5442592摘要:提出了一种可以抵消温度的影响和湿度的变化的新型超声波测距仪,包括测量单元和参考资料。
在每一个单位,重复的一系列脉冲的产生,每有一个重复率,直接关系到各自之间的距离,发射机和接收机。
该脉冲序列提供给各自的计数器,计数器的产出的比率,是用来确定被测量的距离。
出版日期:1995年8月15日主审查员:罗保.伊恩j.一、背景发明本发明涉及到仪器的测量距离,最主要的是,这种仪器,其中两点之间传输超声波。
精密机床必须校准。
在过去,这已经利用机械设备来完成,如卡钳,微米尺等。
不过,使用这种装置并不利于本身的自动化技术发展。
据了解,两点之间的距离可以通过测量两点之间的行波传播时间的决定。
这样的一个波浪型是一种超声波,或声波。
当超声波在两点之间通过时,两点之间的距离可以由波的速度乘以测量得到的在分离的两点中波中转的时间。
因此,本发明提供仪器利用超声波来精确测量两点之间的距离对象。
当任意两点之间的介质是空气时,声音的速度取决于温度和空气的相对湿度。
因此,它是进一步的研究对象,本次的发明,提供的是独立于温度和湿度的变化的新型仪器。
二、综述发明这项距离测量仪器发明是根据上述的一些条件和额外的一些基础原则完成的,其中包括一个参考单位和测量单位。
参考和测量单位是相同的,每个包括一个超声波发射机和一个接收机。
间隔发射器和接收器的参考值是一个固定的参考距离,而间距之间的发射机和接收机的测量单位是有最小距离来衡量的。
在每一个单位,发射器和接收器耦合的一个反馈回路,它会导致发射器产生超声脉冲,这是由接收器和接收到一个电脉冲然后被反馈到发射机转换,从而使重复系列脉冲的结果。
医疗诊断超声波名词中英文对照
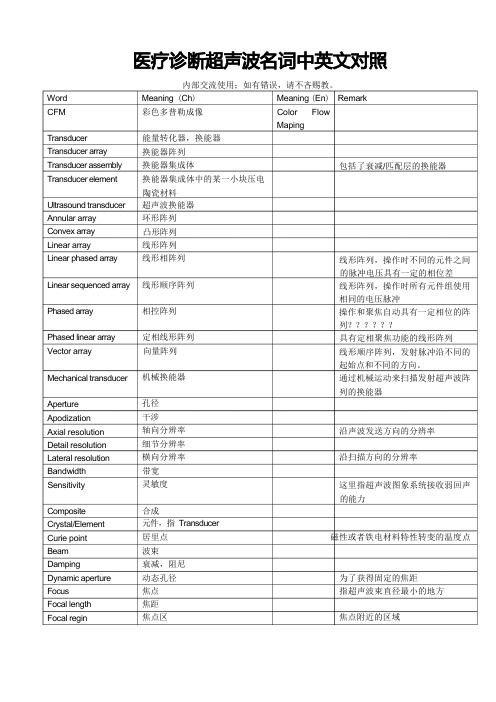
内部交流使用;如有错误,请不吝赐教。
WordCFMTransducer Transducer array Transducer assembly Transducer elementUltrasound transducer Annular array Convex array Linear arrayLinear phased array Linear sequenced array Phased arrayPhased linear array Vector arrayMechanical transducerAperture ApodizationAxial resolutionDetail resolution Lateral resolution Bandwidth SensitivityCompositeCrystal/Element Curie pointBeamDampingDynamic aperture FocusFocal lengthFocal regin Meaning (Ch)彩色多普勒成像能量转化器,换能器换能器阵列换能器集成体换能器集成体中的某一小块压电陶瓷材料超声波换能器环形阵列凸形阵列线形阵列线形相阵列线形顺序阵列相控阵列定相线形阵列向量阵列机械换能器孔径干涉轴向分辨率细节分辨率横向分辨率带宽灵敏度合成元件,指Transducer居里点波束衰减,阻尼动态孔径焦点焦距焦点区Meaning (En) RemarkColor FlowMaping包括了衰减/匹配层的换能器线形阵列,操作时不同的元件之间的脉冲电压具有一定的相位差线形阵列,操作时所有元件组使用相同的电压脉冲操作和聚焦自动具有一定相位的阵列具有定相聚焦功能的线形阵列线形顺序阵列,发射脉冲沿不同的起始点和不同的方向。
通过机械运动来扫描发射超声波阵列的换能器沿声波发送方向的分辨率沿扫描方向的分辨率这里指超声波图象系统接收弱回声的能力磁性或者铁电材料特性转变的温度点为了获得固定的焦距指超声波束直径最小的地方焦点附近的区域Focal zoneExternal focus Internal focusLensElectric impulse Electric voltage F number Fractional bandwidth Near zone/Near field/ Fresnel zone Far zone/Far field/ Fraunhofer zone Near zone length Far zone length Grating lobesSide lobesPZTPVDFCeramic Piezoelectric Matching layerOperating frequency Resonance frequency Probe / ScanheadPulsed modeShock-excited mode Quality (Q) factor Sound beamSourceVoltage burst Voltage impulse EchoTissues 焦点区的长度外部焦点内部焦点凸透镜电脉冲电动势焦距与换能器孔径之比小数带宽收缩区扩张区收缩区长度扩张区长度栅瓣旁瓣锆钛酸铅聚偏氟乙烯陶瓷压电体匹配层(最佳)工作频率共振频率探头脉冲方式震激模式Q 因子声波波束声源突发电压电压脉冲回声组织由换能器凸透镜产生的焦点由凸换能器产生的焦点带宽与工作频率的比值超声波束直径随距离换能器增大而减小的区域超声波束直径随距离换能器增大而增大的区域声波发射过程中,在不少方向上都有能量传播,不同方向上的能量分布不同。
中英文文献翻译—超声波测距系统

附录2This article described the three directions (before, left, right) ultrasonic ranging system is to understand the front of the robot, left and right environment to provide a movement away from the information. (Similar to GPS Positioning System)A principle of ultrasonic distance measurement1, the principle of piezoelectric ultrasonic generatorPiezoelectric ultrasonic generator is the use of piezoelectric crystal resonators to work. Ultrasonic generator, the internal structure as shown in Figure 1, it has two piezoelectric chip and a resonance plate. When it's two plus pulse signal, the frequency equal to the intrinsic piezoelectric oscillation frequency chip, the chip will happen piezoelectric resonance, and promote the development of plate vibration resonance, ultrasound is generated. Conversely, if the two are not inter-electrode voltage, when the board received ultrasonic resonance, it will be for vibration suppression of piezoelectric chip, the mechanical energy is converted to electrical signals, then it becomes the ultrasonic receiver.2, the principle of ultrasonic distance measurementUltrasonic transmitter in a direction to launch ultrasound, in the moment to launch the beginning of time at the same time, the spread of ultrasound in the air, obstacles on his way to return immediately, the ultrasonic reflected wave received by the receiver immediately stop the clock. Ultrasound in the air as the propagation velocity of 340m / s, according to the timer records the time t, we can calculate the distance between the launch distance barrier (s), that is: s = 340t / 2Ultrasonic Ranging System for the Second Circuit DesignSystem is characterized by single-chip microcomputer to control the use of ultrasonic transmitter and ultrasonic receiver since the launch from time to time, single-chip selection of 8751, economic-to-use, and the chip has 4K of ROM, to facilitate programming. Circuit schematic diagram shown in Figure 2. Draw only the front range of the circuit wiring diagram, left and right in front of Ranging Ranging circuits and the same circuit, it is omitted.1,40 kHz ultrasonic pulse generated with the launchRanging system using the ultrasonic sensor of piezoelectric ceramic sensors UCM40, its operating voltage of the pulse signal is 40kHz, which by the single-chip implementation of the following procedures to generate.puzel: mov 14h, # 12h; ultrasonic firing continued 200mshere: cpl p1.0; output 40kHz square wavenop;nop;nop;djnz 14h, here;retRanging in front of single-chip termination circuit P1.0 input port, single chip implementation of the above procedure, the P1.0 port in a 40kHz pulse output signal, after amplification transistor T, the drive to launch the first ultrasonic UCM40T, issued 40kHz ultrasonic pulse, and the continued launch of 200ms. Ranging the right and the left side of the circuit, respectively, then input port P1.1 and P1.2, the working principle and circuit in front of the same location.2, reception and processing of ultrasonicUsed to receive the first launch of the first pair UCM40R, the ultrasonic pulse modulation signal into an alternating voltage, the op-amp amplification IC1A and after polarization IC1B to IC2. IC2 is locked loop with audio decoder chip LM567, internal voltage-controlled oscillator center frequency of f0 = 1/1.1R8C3, capacitor C4 determine their target bandwidth. R8-conditioning in the launch of the carrier frequency on the LM567 input signal is greater than 25mV, the output from the high jump 8 feet into a low-level, as interrupt request signals to the single-chip processing.Ranging in front of single-chip termination circuit output port INT0 interrupt the highest priority, right or left location of the output circuit with output gate IC3A access INT1 port single-chip, while single-chip P1.3 and P1. 4 received input IC3A, interrupted by the process to identify the source of inquiry to deal with, interrupt priority level for the first left right after. Part of the source code is as follows:receive1: push pswpush accclr ex1; related external interrupt 1jnb p1.1, right; P1.1 pin to 0, ranging from right to interrupt service routine circuitjnb p1.2, left; P1.2 pin to 0, to the left ranging circuit interrupt service routinereturn: SETB EX1; open external interrupt 1pop? accpop? pswretiright: ...?; right location entrance circuit interrupt service routine? Ajmp? Returnleft: ...; left Ranging entrance circuit interrupt service routine? Ajmp? Return4, the calculation of ultrasonic propagation timeWhen you start firing at the same time start the single-chip circuitry within the timer T0, the use of timer counting function records the time and the launch of ultrasonic reflected wave received time. When you receive the ultrasonic reflected wave, the receiver circuit outputs a negative jump in the end of INT0 or INT1 interrupt request generates a signal, single-chip microcomputer in response to external interrupt request, the implementation of the external interrupt service subroutine, read the time difference, calculating the distance . Some of its source code is as follows:RECEIVE0: PUSH PSWPUSH ACCCLR EX0; related external interrupt 0? MOV R7, TH0; read the time valueMOV R6, TL0?CLR CMOV A, R6SUBB A, # 0BBH; calculate the time differenceMOV 31H, A; storage resultsMOV A, R7SUBB A, # 3CHMOV 30H, A?SETB EX0; open external interrupt 0POP ACC?POP PSWRETIFourth, the ultrasonic ranging system software designSoftware is divided into two parts, the main program and interrupt service routine, shown in Figure 3 (a) (b) (c) below. Completion of the work of the main program is initialized, each sequence of ultrasonic transmitting and receiving control.Interrupt service routines from time to time to complete three of the rotation direction of ultrasonic launch, the main external interrupt service subroutine to read the value of completion time, distance calculation, the results of the output and so on.V. CONCLUSIONSRequired measuring range of 30cm ~ 200cm objects inside the plane to do a number of measurements found that the maximum error is 0.5cm, and good reproducibility. Single-chip design can be seen on the ultrasonic ranging system has a hardware structure is simple, reliable, small features such as measurement error. Therefore, it can be used not only for mobile robot can be used in other detection systems.Thoughts: As for why the receiver do not have the transistor amplifier circuit, because the magnification well, CX20106 integrated amplifier, but also with automatic gain control level, magnification to 76dB, the center frequency is 38k to 40k, is exactly resonant ultrasonic sensors frequency译文=====本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ultrasonic distance meterDocument Type and Number:United States Patent 5442592Abstract:An ultrasonic distance meter cancels out the effects of temperature and humidity variations by including a measuring unit and a reference unit. In each of the units, a repetitive series of pulses is generated, each having a repetition rate directly related to the respective distance between an electroacoustic transmitter and an electroacoustic receiver. The pulse trains are provided to respective counters, and the ratio of the counter outputs is utilized to determine the distance being measured.A.BACKGROUND OF THE INVENTIONThis invention relates to apparatus for the measurement of distance and, more particularly, to such apparatus which transmits ultrasonic waves between two points.Precision machine tools must be calibrated. In the past, this has been accomplished utilizing mechanical devices such as calipers, micrometers, and the like. However, the use of such devices does not readily lend itself to automation techniques. It is known that the distance between two points can be determined by measuring the propagation time of a wave travelling between those two points. One such type of wave is an ultrasonic, or acoustic, wave. When an ultrasonic wave travels between two points, the distance between the two points can be measured by multiplying the transit time of the wave by the wave velocity in the medium separating the twopoints. It is therefore an object of the present invention to provide apparatus utilizing ultrasonic waves to accurately measure the distance between two points.When the medium between the two points whose spacing is being measured is air, the sound velocity is dependent upon the temperature and humidity of the air. It is therefore a further object of the,present invention to provide apparatus of the type described which is independent of temperature and humidity variations.B.SUMMARY OF THE INVENTIONThe foregoing and additional objects are attained in accordance with the principles of this invention by providing distance measuring apparatus which includes a reference unit and a measuring unit. The reference and measuring units are the same and each includes an electroacoustic transmitter and an electroacoustic receiver. The spacing between the transmitter and the receiver of the reference unit is a fixed reference distance, whereas the spacing between the transmitter and receiver of the measuring unit is the distance to be measured. In each of the units, the transmitter and receiver are coupled by a feedback loop which causes the transmitter to generate an acoustic pulse which is received by the receiver and converted into an electrical pulse which is then fed back to the transmitter, so that a repetitive series of pulses results. The repetition rate of the pulses is inversely related to the distance between the transmitter and the receiver. Ineach of the units, the pulses are provided to a counter. Since the reference distance is known, the ratio of the counter outputs is utilized to determine the desired distance to be measured. Since both counts are identically influenced by temperature and humidity variations, by taking the ratio of the counts, the resultant measurement becomes insensitive to such variations. C.DETAILED DESCRIPTIONA.principle of ultrasonic distance measurement1, the principle of piezoelectric ultrasonic generatorPiezoelectric ultrasonic generator is the use of piezoelectric crystal resonators to work. Ultrasonic generator, the internal structure as shown in Figure 1, it has two piezoelectric chip and a resonance plate. When it's two plus pulse signal, the frequency equal to the intrinsic piezoelectric oscillation frequency chip, the chip will happen piezoelectric resonance, and promote the development of plate vibration resonance, ultrasound is generated. Conversely, if the two are not inter-electrode voltage, when the board received ultrasonic resonance, it will be for vibration suppression of piezoelectric chip, the mechanical energy is converted to electrical signals, then it becomes the ultrasonic receiver.2, the principle of ultrasonic distance measurementUltrasonic transmitter in a direction to launch ultrasound, in the moment to launch the beginning of time at the same time, the spread of ultrasound in the air, obstacles on his way to return immediately, the ultrasonic reflectedwave received by the receiver immediately stop the clock. Ultrasound in the air as the propagation velocity of 340m / s, according to the timer records the time t, we can calculate the distance between the launch distance barrier (s), that is: s = 340t / 2B.Ultrasonic Ranging System for the Second Circuit DesignSystem is characterized by single-chip microcomputer to control the use of ultrasonic transmitter and ultrasonic receiver since the launch from time to time, single-chip selection of 8751, economic-to-use, and the chip has 4K of ROM, to facilitate programming. Circuit schematic diagram shown in Figure 2. Draw only the front range of the circuit wiring diagram, left and right in front of Ranging Ranging circuits and the same circuit, it is omitted. 1,40 kHz ultrasonic pulse generated with the launchRanging system using the ultrasonic sensor of piezoelectric ceramic sensors UCM40, its operating voltage of the pulse signal is 40kHz, which by the single-chip implementation of the following procedures to generate. puzel: mov 14h, # 12h; ultrasonic firing continued 200mshere: cpl p1.0; output 40kHz square wavenop;nop;nop;djnz 14h, here;retRanging in front of single-chip termination circuit P1.0 input port, single chip implementation of the above procedure, the P1.0 port in a 40kHz pulse output signal, after amplification transistor T, the drive to launch the first ultrasonic UCM40T, issued 40kHz ultrasonic pulse, and the continued launch of 200ms. Ranging the right and the left side of the circuit, respectively, then input port P1.1 and P1.2, the working principle and circuit in front of the same location.2, reception and processing of ultrasonicUsed to receive the first launch of the first pair UCM40R, the ultrasonic pulse modulation signal into an alternating voltage, the op-amp amplification IC1A and after polarization IC1B to IC2. IC2 is locked loop with audio decoder chip LM567, internal voltage-controlled oscillator center frequency of f0 = 1/1.1R8C3, capacitor C4 determine their target bandwidth. R8-conditioning in the launch of the carrier frequency on the LM567 input signal is greater than 25mV, the output from the high jump 8 feet into a low-level, as interrupt request signals to the single-chip processing. Ranging in front of single-chip termination circuit output port INT0 interrupt the highest priority, right or left location of the output circuit with output gate IC3A access INT1 port single-chip, while single-chip P1.3 and P1. 4 received input IC3A, interrupted by the process to identify the source of inquiry to deal with, interrupt priority level for the first left right after. Part of the source code is as follows:receive1: push pswpush accclr ex1; related external interrupt 1jnb p1.1, right; P1.1 pin to 0, ranging from right to interrupt service routine circuitjnb p1.2, left; P1.2 pin to 0, to the left ranging circuit interrupt service routinereturn: SETB EX1; open external interrupt 1pop? accpop? pswretiright: ...?; right location entrance circuit interrupt service routine? Ajmp? Returnleft: ...; left Ranging entrance circuit interrupt service routine? Ajmp? Return3, the calculation of ultrasonic propagation timeWhen you start firing at the same time start the single-chip circuitry within the timer T0, the use of timer counting function records the time and the launch of ultrasonic reflected wave received time. When you receive the ultrasonic reflected wave, the receiver circuit outputs a negative jump in the end of INT0 or INT1 interrupt request generates a signal, single-chip microcomputer in response to external interrupt request, the implementationof the external interrupt service subroutine, read the time difference, calculating the distance . Some of its source code is as follows:RECEIVE0: PUSH PSWPUSH ACCCLR EX0; related external interrupt 0? MOV R7, TH0; read the time valueMOV R6, TL0?CLR CMOV A, R6SUBB A, # 0BBH; calculate the time differenceMOV 31H, A; storage resultsMOV A, R7SUBB A, # 3CHMOV 30H, A?SETB EX0; open external interrupt 0POP ACC?POP PSWRETID.Fourth, the ultrasonic ranging system software designSoftware is divided into two parts, the main program and interrupt service routine, shown in Figure 3 (a) (b) (c) below. Completion of the work of the main program is initialized, each sequence of ultrasonic transmitting andreceiving control.Interrupt service routines from time to time to complete three of the rotation direction of ultrasonic launch, the main external interrupt service subroutine to read the value of completion time, distance calculation, the results of the output and so on.E. CONCLUSIONSRequired measuring range of 30cm ~ 200cm objects inside the plane to do a number of measurements found that the maximum error is 0.5cm, and good reproducibility. Single-chip design can be seen on the ultrasonic ranging system has a hardware structure is simple, reliable, small features such as measurement error. Therefore, it can be used not only for mobile robot can be used in other detection systems.Thoughts: As for why the receiver do not have the transistor amplifier circuit, because the magnification well, CX20106 integrated amplifier, but also with automatic gain control level, magnification to 76dB, the center frequency is 38k to 40k, is exactly resonant ultrasonic sensors frequency.超声波测距仪摘要:提出了一种可以抵消温度的影响和湿度的变化的新型超声波测距仪,包括测量单元和参考资料。