Maxim 激光驱动器和激光二极管的接口(1)
2对1 激光模块使用说明

红树伟业2对1激光模块使用说明感谢您使用我们的一体传感器,下面对此传感器做以下说明:
1.提倡各位同学自己动手制作自己车子的传感器,因为只有经过自己动手做的东西自己才最了解,从中学到更深刻的知识,一旦出了问题自己心里也比较清楚问题是怎么产生的,所以我们原则上不建议大家一直使用我们的一体传感器,我们提供一体传感器的目的在于为大家提供一个激光传感器制作的参考。
2.激光一体传感器接线图:
说明: VCC — +5V ; GND —接地; OUT—信号端。
3.重要注意事项:
电源VCC不得大于5v,需采用串联稳压的稳压芯片供电或本店的稳压电源模块(即必须为恒定直流的供电源)。
如果采用开关稳压芯片,会造成电源不纯净信号的干犹,导致信号灯常亮。
严重可能会烧坏传感器。
每一个信号端都要上拉一个4.7K-10K左右的电阻(随一体传感器赠送),此时出来的直接是电压信号(数字信号),黑白线
的电压差大概是3.5V左右(即在0 、3.7V变化)。
【激光管,调制管,接收管请自行焊接,其他器材我们已经焊接好,提倡大家动手操作,(焊上激光接收管很容易的)】。
激光二极管的原理及应用

激光二极管的原理及应用1. 引言激光二极管是一种将电能转化为光能的电子器件,常用于激光打印机、激光雷达、光通信等领域。
本文将介绍激光二极管的工作原理以及其在不同应用领域中的具体应用。
2. 激光二极管的工作原理激光二极管是基于半导体材料的器件,其工作原理是利用电流通过半导体器件时,会产生光的现象。
以下是激光二极管的工作原理的详细说明:•半导体材料:激光二极管常使用的半导体材料包括镓砷化物(GaAs)、镓铍砷化物(GaInAs)、镓锗磷化物(GaGeP)等。
这些材料具有较高的载流子浓度和较高的流动率,使得电流传输效果良好。
•P-N结构:激光二极管采用P-N结构,即在半导体材料上形成P型和N型区域。
P型区域富集正电荷,而N型区域富集负电荷,从而形成PN结。
•注入激活:当通过激光二极管的材料施加外部电压时,电流将从P 区域流向N区域,载流子(正电荷或负电荷)将注入P-N结中。
•电子复合:当正电荷和负电荷在P-N结中相遇时,它们会发生复合,从而释放出能量。
这些能量以光的形式被发射出来,产生激光束。
•反馈:激光二极管内部设置了光反馈结构,使得激光在多次来回反射后形成稳定的光子增强效应,从而增强激光输出。
3. 激光二极管的应用激光二极管由于其小型化、低功耗、高效能的特点,被广泛应用于多个领域。
以下是几个常见的应用领域:3.1 激光打印机激光打印机是目前最常见的激光二极管应用之一。
通过激光二极管的工作原理,激光打印机可以将输入的数字信号转化为高质量的图像或文字。
激光二极管作为打印机的光源,可以将光束精确地聚焦到打印介质上,从而实现高速、高精度的打印效果。
3.2 光通信激光二极管也被广泛应用于光通信领域。
激光二极管作为光源,可以将数字信号转化为高速的光信号进行传输。
光通信技术具有高传输速率、大带宽、低衰减的特点,适用于长距离通信和高容量数据传输。
3.3 激光雷达激光二极管被应用于激光雷达系统中,用于测量距离、速度、方向等目标物理参数。
MAX3735A 激光驱动器输出配置4驱动vcsel

设计笔记:HFDN-26.3Rev. 1; 04/08MAX3735A激光驱动器输出配置第4部分:驱动VCSELMaxim Integrated ProductsMAX3735A输出配置,第4部分:驱动VCSEL1 前言MAX3735A为直流耦合SFP激光驱动器,专为数据速率达 2.7Gbps (参考文献1)的应用设计。
MAX3735A具有多速率、小封装、APC环路、监视器输出等特性,符合SFP安全/定时规范,非常适合工作在宽数据速率范围的各种光模块应用。
MAX3735A的输出用来驱动直流耦合、边缘发射、共阳极激光器,也可以用于驱动其它各种激光器配置(参考文献2, 3)。
本设计笔记(第4部分)将详细讨论VCSEL驱动,该系列设计笔记的目的在于讨论各种输出配置的优缺点,所提供的原理图和范例有助于模块设计人员在其应用中选择最佳的输出结构。
MAX3735A只是讨论这些接口的一个范例,相关技术同样适用于其它激光驱动器,如MAX3737、MAX3735、MAX3850以及MAX3656,它们具有相似的输出结构。
2 驱动VCSEL垂直腔面发射激光器(VCSEL)通常用于以太网和其它短距离通信应用。
目前有许多专用于VCSEL 的激光驱动器,例如MAX3740、MAX3741和MAX3996。
本篇应用笔记旨在提供MAX3735A 驱动共阳或隔离VCSEL的方案,适合边缘发射激光器与VCSEL共用一个驱动器的应用。
2.1 用MAX3735A驱动VCSEL的优点1.一个器件多种应用—用MAX3735A驱动VCSEL允许模块制造商在多模块应用中(例如以太网、SONET、长程、短程等)使用一个驱动器芯片。
2.增加调制电流—与传统的VCSEL驱动器相比,用MAX3735A能够提供更大的激光驱动电流。
2.2 用MAX3735A驱动VCSEL的缺点3.交流耦合—典型VCSEL的正向电压和串联电阻高于边缘发射激光二极管。
这些因素使直流耦合变得更加困难,甚至难以实现。
光纤激光控制器接口说明

使用说明书
1,面板介绍
1.1前面板
1 2 3 4
1.POWER:电源开关
2.DEBUG/WORK:运行、调试开关
SER POWER:激光功率指示,显示百分比功率
4.ADJ:激光功率调节
1.2后面板
1 2 3 4
1. X11:激光控制接口,连接激光发生器,发出控制指令
2. X21:控制接口,连接机器,接收机器发出的指令
3. X31:激光开关控制接口,控制激光发光
4. 电源输入插口
2,接口功能介绍
X11:激光器控制接口
DB25母头,用于连接激光发生器,设置激光器运行模式,输出模拟电压信号,同时也是激光器故障信号转换口。
接口定义
X21:控制接口
DB25公头,用于连接机器,转换机器控制信号,同时也是激光器反馈信号转换口。
接口定义
X21:激光开关控制接口
DB9母头,用于控制激光器发光,同时也是激光器功率反信号选择口。
接口定义
3,系统接线。
激光驱动器与激光二极管接口优化调试

激光驱动器与激光二极管接口优化调试Maxim高频/光纤通信部一、概述:在激光驱动器与激光二极管的接口电路设计中,即使是对电路做了仔细、周密的考虑,也很难达到最优状态,系统调试过程中仍需对各部分电路加以调整、优化,图1是采用Maxim的2.5Gbps激光驱动器MAX3869构成的激光驱动器典型连接电路。
本文以该电路为例,以激光二极管的输出通过光电(O/E)转换后显示在示波器上的波形为基础,列举了一些通用接口问题和可能的解决办法。
二、优化设计以下列举了八个常见激光管接口问题,激光管的输入是伪随机比特流(PRBS)。
A. 眼图不清晰(图2):图2中,在显示的眼图最下面有黑色水平线。
当减少偏置电流时,波形会被压缩,波形上端下移,底端固定不变。
导致这一问题的原因可能是偏置电流设置得太低,数字零电平低于激光管的门限。
可以提高激光管的偏置电流,直到示波器上的波形开始上移(表示数字零电平已高于激光管门限),当偏置电流增加时,眼图会变得清晰可辨。
B. 欠阻尼振荡(图3):在波形图上有较大的过冲,示波器显示的眼图最下方有黑色水平线。
减小偏置电流使数字1电平下移,但过冲幅度保持不变,甚至增大。
偏置电流减小时波形底端(数字0电平)保持不变。
造成这一现象的可能原因是偏置电流设得太低。
数字0电平低于激光管的门限。
当激光管从低于门限电平向高电平切换时需要额外的时间,从而导致了上升边沿的延迟。
开关延迟使电势积累增加,一旦克服了门限就冲过数字1电平(被称作欠阻尼振荡)。
可通过提高激光管的偏置电流解决,提高激光管的偏置电流直到示波器上的波形开始上移(表示数字零电流已高于激光管门限)。
当数字0电平高于门限值后,过冲将显著减少。
C. 过冲(图4):图4所示,波形的上升沿冲过了数字1电平。
当偏置电流和调制电流变化时过冲的相对幅度没有变化。
没有明显的振铃。
可能原因有两个:(a)上升太快,(b)用于上拉的铁氧体磁珠Q 值太高。
解决的方法是:(a)插入截止频率为75%数据率的低通滤波器,减慢上升和下降沿,减小过冲。
激光器外部控制模式接线说明

激光器外部控制模式接线说明激光器外部控制模式接线说明图1说明:OUT和EXGND是SMC6480的两个I O口,分别接到继电器的13引脚和24V直流电源的COM端口,24V电源正接到继电器的14引脚,通过程序指令可以控制继电器13、14引脚上24V直流电压的通断。
当13、14引脚加上高电平,继电器的5、9引脚闭合接通,此时激光器的A1、A2两端会加上24V高电平,如果激光器所有条件准备就绪,就可以出光;若要关光,可通过程序指令使继电器断开5、9引脚。
图1 外部控制接线线路图激光器操作说明:IPG激光器有两种使用模式—TEST模式和Robot模式。
实验室现有的激光器是美版的,当激光器正面的钥匙旋钮左转打到REM时就是Robot 模式—(用机器手控制激光),右转打到ON时就是TEST模式--(用SMC6480外部控制激光)。
激光器的侧面旋钮和水冷机的侧面旋钮右转打到ON代表AC电源给内部接线端口供电,所以不论激光器用哪种模式,这两个侧面旋钮都是打到ON上。
激光器外部控制操作步骤:1、打开激光器和水冷机的侧面旋钮到ON 上2、打开逆变焊机和KUKA机器人的开关3、将激光器正面钥匙右转打到ON上4、打开LASERNET软件,点到control界面5、开启激光器电源—手动按下激光器正面的START按钮6、将外控按钮点开,将光闸通道1打开,将引导激光开启7、设置激光功率,点开激光发射按钮,此时没有出光8、通过SMC6480使外部24VDC加到A1、A2上。
激光出光。
备注:1、引导激光通道1、2分别代表熔覆头和焊接头的引导激光,光闸通道1、2分别代表熔覆头和焊接头的光闸。
2、激光器电源开启后激光器顶部的灯会亮下面的部分,当点开激光发射按钮,激光器顶部的灯全亮。
3、LASERNET无法启动激光器电源,但是可以通过LASERNET 下高压—关掉激光器电源。
激光二极管的单端和差分驱动比较

应用笔记:HFAN-2.5.0Rev 0; 05/04激光二极管的单端和差分驱动比较MAXIM 高频/光纤通信部Maxim Integrated ProductsAN3239C.pdf 05/25/2004激光二极管的单端和差分驱动比较1 引言为了优化光发送器设计,应该选择合适的接口电 路连接驱动器和激光二极管。
一般而言,激光二 极管单端驱动比较简单,需要较少的元件和电路 板面积。
缺点是边沿速度较慢,收发器电源上具 有较大噪声,这些缺点最终会影响接收灵敏度。
实际应用表明,采用差分驱动的光发送器能够克 服单端驱动的不足。
本应用笔记阐述了差分驱动 比单端驱动能够提供更快边沿速率的原因。
Laser Driver CP2OUTCP1 OUT+ RD VCCBIAS RF CF2 单端驱动和差分驱动的电路配置对于单端驱动,激光调制电流加在激光器阳极 (共阴极激光器)或激光器阴极(共阳极激光器)。
图 1 是驱动共阳极激光器的简单原理图,调制电 流通过阻尼电阻(RD)加在激光器阴极。
激光器阳 极直接连接至电源,驱动器偏置输出经过铁氧体 磁珠隔离后为激光器提供偏置。
对于平衡的直流 和交流负载,通过铁氧体磁珠和电阻构成的并联 网络将驱动电路互补输出上拉至VCC ,该电阻匹 配于激光器负载和阻尼电阻的等效阻抗。
RC并 联网络(RF 和CF)提供高频衰减。
驱动器输出电容 CP (CP1 和CP2)表示输出晶体管等效电容、封装和 电路板寄生电容的等效值。
图 1. 驱动激光二极管的单端方式VCCLaser Driver CP2OUTCP1 OUT+ RDBIAS图 2. 驱动激光二极管的差分方式图 2 所示是差分驱动的例子。
激光器阴极通过一 个阻尼电阻(RD)交流耦合至驱动电路输出。
驱动 器输出通过铁氧体磁珠上拉至VCC ,为输出晶体 管提供直流偏置。
驱动电路互补输出和激光二极 管阳极公共端通过一个铁氧体磁珠连接至VCC , 铁氧体磁珠提供VCC 的高频隔离。
3738电路功能详解
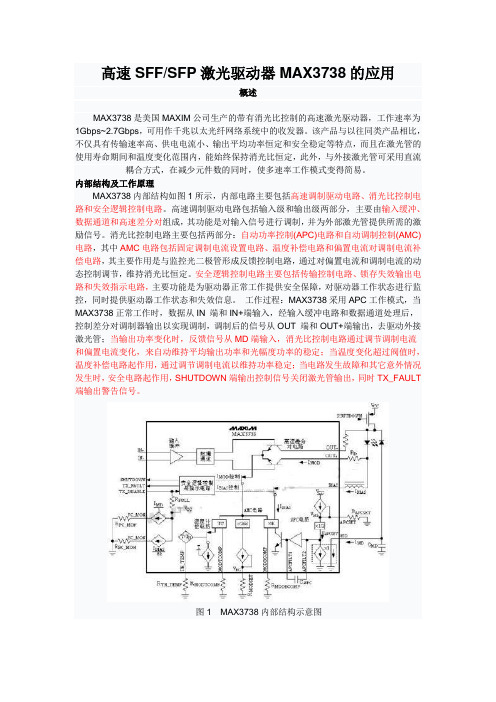
高速SFF/SFP激光驱动器MAX3738的应用概述MAX3738是美国MAXIM公司生产的带有消光比控制的高速激光驱动器,工作速率为1Gbps~2.7Gbps,可用作千兆以太光纤网络系统中的收发器。
该产品与以往同类产品相比,不仅具有传输速率高、供电电流小、输出平均功率恒定和安全稳定等特点,而且在激光管的使用寿命期间和温度变化范围内,能始终保持消光比恒定,此外,与外接激光管可采用直流耦合方式,在减少元件数的同时,使多速率工作模式变得简易。
内部结构及工作原理MAX3738内部结构如图1所示,内部电路主要包括高速调制驱动电路、消光比控制电路和安全逻辑控制电路。
高速调制驱动电路包括输入级和输出级两部分,主要由输入缓冲、数据通道和高速差分对组成,其功能是对输入信号进行调制,并为外部激光管提供所需的激励信号。
消光比控制电路主要包括两部分:自动功率控制(APC)电路和自动调制控制(AMC)电路,其中AMC电路包括固定调制电流设置电路、温度补偿电路和偏置电流对调制电流补偿电路,其主要作用是与监控光二极管形成反馈控制电路,通过对偏置电流和调制电流的动态控制调节,维持消光比恒定。
安全逻辑控制电路主要包括传输控制电路、锁存失效输出电路和失效指示电路,主要功能是为驱动器正常工作提供安全保障,对驱动器工作状态进行监控,同时提供驱动器工作状态和失效信息。
工作过程:MAX3738采用APC工作模式,当MAX3738正常工作时,数据从IN 端和IN+端输入,经输入缓冲电路和数据通道处理后,控制差分对调制器输出以实现调制,调制后的信号从OUT 端和OUT+端输出,去驱动外接激光管;当输出功率变化时,反馈信号从MD端输入,消光比控制电路通过调节调制电流和偏置电流变化,来自动维持平均输出功率和光幅度功率的稳定;当温度变化超过阀值时,温度补偿电路起作用,通过调节调制电流以维持功率稳定;当电路发生故障和其它意外情况发生时,安全电路起作用,SHUTDOWN端输出控制信号关闭激光管输出,同时TX_FAULT 端输出警告信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Maxim 激光驱动器和激光二极管的接口Maxim 高频/光纤通信部一概述 用激光驱动器驱动高速商用激光二极管是设计人员所面临的一项挑战本文旨在就这一主题为光学系统设计者提供参考以尽可能地简化设计过程激光管接口电路的设计难点在于 激光驱动器的输出电路 激光二极管的电气特性和 二者之间的接口 (通常采用印刷电路板实现) 以下首先讨论激光二极管和激光驱动器的电气特性然后再结合二者讨论印刷电路板的接口以Maxim 的 2.5 Gbps 通信激光驱动器 MAX3867 和 MAX3869为例来说明典型的应用二激光二极管特性 流过激光管的电流超过它的门限值时半导体激光二极管产生并保持连续的光输出对于快速开关操作激光二极管的偏置需略高于门限以避免开关延迟激光输出的强弱取决于驱动电流的幅度电流-光转换效率或激光二极管的斜率效率门限电流和斜率效率取决于激光器结构制造工艺材料和工作温度图1给出了典型激光二极管的电压-电流特性和光输出与驱动电流的关系当温度升高时门限电流将以指数方式增加可近似用下式表示I T T I th e K I T I ⋅+=0)( (1)式中 I 0, K I 和 T I 是激光器常数例如对DBF 激光器 I 0 = 1.8mA, K I = 3.85mA, T I = 40°C 激光器的斜率效率(S) 是输出光功率 (mW) 与输入电流mA)的比值温度升高将导致斜率效率降低下式较好地表示了斜率效率与温度的函数关系ST T S e K S T S ⋅−=0)((2) 对上述同样的DFB 激光器特征温度T S 近似等于40°C 其它两个参数 S 0 = 0.485mW/mA K S = 0.033mW/mA 激光管工作电压正向电压V 和电流I 的关系可由二极管的电压和电流特性模型来表示 T V VS e I I ⋅⋅≈η, (3)其中 I S 是二极管饱和电流 V T 是热电压η是结构常数当激光二极管被驱动至门限上下时电压和电流的关系近似为线性如图1所示图2是激光二极管的简化模型图中直流偏置电压V BG 是激光二极管的带隙电压 R L 是二极管的动态电阻当驱动激光管至门限以上时激光管的输出光功率P 0 (图2)可由下式来表示)(0th I I S P −⋅=(4)图2. 简化的激光二极管等效电路 激光管电流注意对封装好的激光管模型化时还应考虑一些寄生因素例如引线电感三 激光驱动器的输出结构激光驱动器的基本功能是给激光二极管提供适当的偏置电流和调制电流如图3所示恒定偏置电流使激光二极管工作于门限以上的线性区交变的调制电流与输入电压同步理想状态偏置电流应随门限电流而变调制电流应随斜率效率而变MAX3867/MAX3869激光驱动器可用于驱动共阳激光二极管的设计中通过外部电阻将偏置电流设置在最小值典型值为1-5mA 与最大值典型值为60-100mA 之间在激光二极管的阴极保持恒定的阻抗很关键它能够使高速输出电路的负载相对于频率保持稳定 输出电路负载的不稳定可能引起反射振铃降低光学波形的质量与偏置电流源相关的分流电容会产生与频率有关的阻抗(Z BIAS )为了减小阻抗变化的影响激光二极管阴极和偏置电路间外置一隔离电感或磁珠该电感对直流偏置电路没有影响但对调制电流将呈现高阻抗 调制电流的大小取决于外部电阻R MOD (图4)此电阻控制差分输出级的电流源激光驱动器由输出级晶体管的集电极输出大多数情况下集电极开路输出的上拉元件电阻或电感没有集成在激光驱动器内部需外接上拉元件四 PC 板接口目前光通信系统要求在工作速率传输距离和能量损耗上进行改进这需要提高边缘速率增加键A. 直流耦合的电压余量问题 驱动器和激光管之间用直流耦合的方式连接是一种简单的接口方式如图5所示 但当电源电压降到+3.3V 时驱动器的电压余量不足以使驱动器快速切换(电压余量 指供电电压Vcc 与电路上压降和的差) 含有激光二极管电路的电压余量的计算必须考虑激光器的压降和激光器封装造成的寄生电感上的暂态压降和阻尼电阻R D 上的压降典型的长波Fabry-Perot 类激光二极管需要1.2V 到1.8V 的正向偏置电压该正向电压等于带隙电压和激光二极管等效串联电阻上的压降和(见图 2)这种类型的激光管其等效串联电阻典型值是4至6欧姆激光管的封装产生寄生电感因此高速开关电流在寄生电感上将产生暂态电压降该电压可由V L = L ∆i/∆t 来近似估算 假定典型的激光管封装其寄生电感是1.5 nH 最大调制电流60mA 上升/下降时间为80ps (对2.5Gbps 而言)我们可计算出V L 的近似值 (注意在20%-80% 上升时间内∆i 近似等于最大调制电流的60% 即0.6×60mA = 36mA.) 在上述假定情况下V L ≈ (1.5nH)(36mA/80ps) = 0.68V 针对图5的直流耦合接口我们可以估算电压余量值考虑到封装好的激光二极管的最大正向电压V F (图2中的V BG + IR L )为1.6V 同样假设封装寄生电感1.5nH 60mA 调制电流和80ps 的20%-80%上升速率 V L = 0.68V (参见前一小节的计算) 同时我们还必须包括串联阻尼电阻R D 上的压降I MOD R D = 1.2V (假设R D = 20Ω)驱动器输出低电压应为V LOW = V CC – 1.2V – 0.68V – 1.6V = V CC – 3.48V 所以采用3.3V 工作将非常困难 B. 交流耦合 上述的电压余量问题在驱动器和激光二极管采用交流耦合的情况下将大大改善交流耦合增加了串联电容C D 和上拉电感L P 如图6中所示 交流耦合的电压降由以下三部分组成 (1) 激光二极管的交流压降仅仅是其等效串联电阻(而不是带隙)上压降的函数等于调制电流与等效串联电阻的乘积 (2)寄生电感引起的暂态电压降 (3) 串联阻尼电阻R D 上的压降等于调制电流与R D 乘积的一 半流过C D 的电流为0到峰值电流摆幅I MOD 之间在激光输出强的时候平均有1/2 I MOD 电流从激光管流图 5. 直流耦合接口电路C D 流向激光管因此流过激光管的电流I L 等于从激光二极管阴极处流出电流的和即在激光输出强时I L = I BIAS + I MOD /2 在激光输出弱时I L = I BIAS – I MOD /2高低输出时的电流差正好等于 (I BIAS + I MOD /2) – (I BIAS – I MOD /2) = I MOD .交流耦合情况下假设激光管的等效串联电阻为5Ω则电压余量为 V LOW = V CC – (60mA)(5Ω) – 0.68V – (60mA/2)(20Ω) = V CC – 1.58V 当V CC = 3.3V 时给驱动器留下了1.72V 的电压余量这就允许在驱动器的输出级以更快的电流开关速率输出件这些分立元件包括耦合电容和用于驱动器晶体管偏置的上拉电感或电阻(如图6所示)由于这些元件处于高速信号通道可能会导致信号失真因此必须采用很好的高频印刷电路板布线技术交流耦合电容同时会阻断低频输出它会影响系统的位像抖动pattern dependent jitter 性能为了减少长常1或常0比特流造成的位像抖动, 交流耦合电容应尽可能大用Maxim 2.5Gbps 激光管驱动器来设计时通常使用0.056µF 至0.1µF 的电容交流耦合接口中上拉电感或电阻用来正确偏置输出驱动三极管(感性上拉时通常采用小铁氧磁珠)使用电阻的缺点(相对电感而言)是(1) 上拉电阻(R pull-up ) 分流了激光管的部分调制电流 (2)采用电阻上拉时输出电压是V CC – (I MOD /2)R pull-up 而采用电感上拉时输出电压为V CC (图7所示)C.C. 激光管与驱动器的连接驱动器和激光管的连接性能取决于两者的距离如果距离小于几毫米 (对2.5Gbps 速率), 不必用传输线尽可能减少寄生因素引线和激光管封装连线电感造成的感性负载可能需要电阻(R F )和电容(C F )组成的RC 分流网络 (见图6)来补偿RC 分流网络的目的是为了消除寄生电感从而保持纯电阻性负载减少过冲和振铃串联阻尼电阻 (R D ) 有两个作用既抑制了导致输出失真的反射又建立了一个稳定的负载激光管自身的负载一般在5Ω上下波动20% (1Ω/5Ω ≈ 20%)总负载包括R D 变化只有4% (1Ω/25Ω ≈ 4%)这就提高了负载的稳定度对封装好的MAX3867和MAX3869假定使用同轴封装的激光管这些器件的初始参数为R D = 20Ω, R F = 75Ω, 和C F = 3pF 由于不同的激光管其封装电感不同应对用于分流网络的元件值进行调整以达到最优工作状态另外偏置电感应直接连接到激光管的阴极这样R D 就不会在驱动器的偏置级引起电压余量问题(图8)图7. 直流耦合和交流耦合时的输出电压 (V OUT+) 和 激光管电流 (I L )D. 其它电路板设计注意事项对高速差分驱动器而言两个输出之间需保持负载平衡负载阻抗的幅度和相位都必须保持平衡 (图8)为了保持平衡负载阻抗驱动器的正输出驱动一传输线该传输线通过匹配电阻或激光二极管(25Ω组合负载)连接负载终端Vcc 驱动器的负输出通过一25Ω电阻连接到Vcc退耦电容提供了从激光管阳极到地和负输出端25Ω电阻到地的交流通路高频通路可分为几个部分(参照图9)第一部分(A)从驱动器的正输出通过传输线的顶端导体到终端电阻第二部分(B)从终端电阻到激光二极管第三部分(C)是接地的退耦电容第四部分D是从退耦电容的接地端到传输线镜像第五部分(E)是传输线在地平面上的镜像第六部分(F)是从传输线镜像到负输出端退耦电容的接地端第七部分(G)是负输出端的退耦电容第八部分(H)是负输出端的电阻由于高频回路包括地平面因此在正输出和负输出端提供良好的Vcc 到地的退耦就显得非常重要正输出端的退耦电容(C) 确保电流能沿传输线镜像返回使传输线正常工作负输出端的退耦电容 (G) 使电流返回负端通常使用体积小的电容来达到好的高频退耦性能B, D, F, 和 H 部分的连线(它们不是传输线)越短越好以减少两驱动器输出间的传输延迟因为两差分输出间的传输延迟将导致两差分输出到达终端后的相位不平衡避免这种情况的一个方法是采用体积小的终端电阻同时还应该使印刷电路板上驱动器输出引脚处的连线不作为传输线的那部分尽可能的短Maxim北京办事处金国峰编译摘自LightwaveR DTop ConductorFA图9. 驱动器和激光二极管之间的高频信号通路。