can总线协议完全解析
can协议解析
can协议解析CAN(Controller Area Network)协议是一种多主机串行通信总线系统,在汽车电子设备中广泛应用。
它最早由德国BOSCH公司在1980年代开发,并在1986年首次应用于汽车电子系统中。
CAN协议主要用于在汽车电子系统中实现各种传感器、执行器和控制器之间的高速通信。
它的主要特点是具有高可靠性、实时性强和低成本的优势。
CAN总线可以连接多个设备,并且每个设备都可以通过识别唯一的标识符进行通信。
CAN协议的目标是提供可靠的数据传输,并能够适应恶劣的工作环境。
CAN总线系统可以通过差分传输来抵抗噪声干扰,从而提高系统的抗干扰能力。
此外,CAN总线还使用了错误检测和纠正技术,例如循环冗余校验(CRC),以确保数据的完整性。
CAN协议使用两种帧格式进行数据传输:数据帧和远程帧。
数据帧用于发送和接收数据,而远程帧用于请求其他设备发送数据。
每个帧都由标识符(ID)、控制位(Control)、数据字段(Data)和CRC校验码组成。
在CAN系统中,每个设备都有一个唯一的标识符,并且可以根据标识符的优先级决定哪个设备可以传输数据。
更高优先级的设备可以中断低优先级的设备并发送数据。
这种功能使得CAN总线可以实现实时性强的通信,适用于需要对时间敏感的应用。
在数据传输中,CAN协议使用广播方式,即每个设备发送的数据都可以被其他设备接收和处理。
这种广播方式使得CAN 总线适用于分布式系统,可以简化系统的结构,并减少线束的数量。
总结来说,CAN协议是一种在汽车电子系统中应用广泛的串行通信协议,它具有高可靠性、实时性强和低成本等优势。
CAN总线可以连接多个设备,并且每个设备都可以通过唯一标识符进行通信。
CAN协议使用差分传输、错误检测和纠正技术来提高系统的抗干扰能力和数据传输的可靠性。
通过广播方式进行数据传输,使得CAN总线适用于分布式系统。
CAN协议规范解析
CAN协议规范解析CAN(Controller Area Network,控制器局域网)是一种高性能、实时性强、可靠性高的现场总线通信协议。
它最初是由德国Bosch公司为汽车电子系统开发的,现已广泛应用于汽车、工业自动化、电力系统等领域。
CAN协议规范完整,包括物理层、数据链路层、网络层和应用层。
1.物理层CAN协议的物理层使用两根信号线CAN_H和CAN_L构成差分传输线路。
CAN_H线接收高电平信号,CAN_L线接收低电平信号,通过这种方式实现数据的传递和接收。
这种差分传输方式具有抗干扰能力强、传输距离远等优点。
物理层还包括传输速率的定义,CAN协议支持多种传输速率,常用的有1 Mbps、500 kbps、250 kbps、125 kbps等。
选择不同的传输速率可以根据实际需求进行配置。
2.数据链路层数据链路层主要负责将上层应用发送的数据封装成CAN帧,并在总线上进行传输。
CAN帧由以下四个部分组成:起始位(SOF)、标识符(ID)、数据域(Data)和CRC校验码。
起始位用于同步接收方的时钟,标识符用于区分不同的数据帧,数据域用于传输应用数据,CRC校验码用于检测数据的传输错误。
CAN协议支持标准帧和扩展帧两种类型的数据帧,标识符的长度不同,标准帧为11位,扩展帧为29位。
扩展帧可以提供更多的ID范围,适用于大规模网络通信。
数据链路层还包括数据帧的发送和接收机制。
CAN协议采用一种优先级机制,不同的数据帧有不同的优先级,优先级高的数据帧可以打断正在传输的低优先级数据帧。
这种机制能够保证高优先级数据的实时性和可靠性。
3.网络层网络层主要负责CAN网络中节点之间的通信,包括数据的路由和过滤。
CAN网络支持多个节点的连接,节点之间可以通过总线进行双向通信。
每个节点可以发送和接收数据帧,通过标识符来区分不同节点的数据帧。
网络层还包括数据的过滤和控制,可以根据接收节点的ID进行过滤,只接收符合条件的数据帧。
(完整版)CAN总线解析
一、概述CAN(Controller Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。
想到CAN就要想到德国的Bosch公司,因为CAN就是这个公司开发的(和Intel)CAN 有很多优秀的特点,使得它能够被广泛的应用。
比如:传输速度最高到1Mbps,通信距离最远到10KM,无损位仲裁机制,多主结构。
近些年来,CAN控制器价格越来越低,很多MCU也集成了CAN控制器。
现在每一辆汽车上都装有CAN总线。
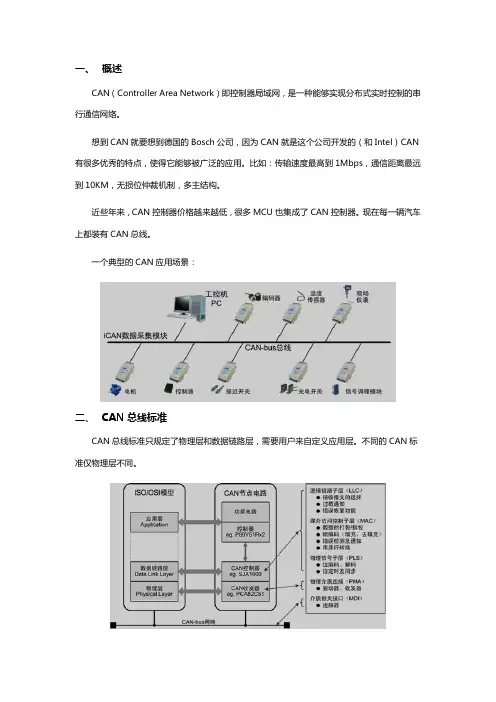
一个典型的CAN应用场景:二、CAN总线标准CAN总线标准只规定了物理层和数据链路层,需要用户来自定义应用层。
不同的CAN标准仅物理层不同。
CAN收发器负责逻辑电平和物理信号之间的转换,将逻辑信号转换成物理信号(差分电平)或者将物理信号转换成逻辑电平。
CAN标准有两个,即IOS11898和IOS11519,两者差分电平特性不同。
(有信号时,CANH 3.5V,CANL 1.5V,即显性;没有信号时,CANH 2.5V,CANL 2.5V,即隐性)IOS11898高速CAN电平中,高低电平的幅度低,对应的传输速度快。
双绞线共模消除干扰,是因为电平同时变化,电压差不变。
2.1物理层CAN有三种接口器件多个节点连接,只要有一个为低电平,总线就为低电平,只有所有的节点都输出高电平时,才为高电平。
所谓“线与”。
CAN总线有5个连续性相同的位后,就会插入一个相反位,产生跳变沿,用于同步。
从而消除累计误差。
和485、232一样,CAN的传输速度与距离成反比。
CAN总线终端电阻的接法:特点:低速CAN在CANH和CANL上串入2.2kΩ的电阻;高速CAN在CANH和CANL 之间并入120Ω电阻。
为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。
(因为大多数双绞线电缆特性阻抗大约在100~120Ω。
)120欧姆只是为了保证阻抗完整性,消除回波反射,提升通信可靠性的,因此,其只需要在总线最远的两端接上120欧姆电阻即可,而中间节点并不需要接(接了反而有可能会引起问题)。
can协议完全讲解

can协议完全讲解CAN协议完全讲解。
CAN协议是Controller Area Network的缩写,是一种串行通信协议,广泛应用于汽车、工业控制、航空航天等领域。
CAN协议的特点是高可靠性、实时性强、抗干扰能力强,因此在工业控制领域得到了广泛的应用。
首先,CAN协议的基本原理是基于总线的通信方式,即多个节点通过共享同一条总线进行通信。
CAN总线上的每个节点都有一个唯一的标识符,可以通过这个标识符来识别节点。
当一个节点发送消息时,其他节点可以根据消息的标识符来判断是否需要接收这个消息。
这种方式可以有效地减少通信冲突,提高通信效率。
其次,CAN协议采用了差分信号传输的方式,可以有效地抵抗电磁干扰。
在传输过程中,CAN总线上的信号由两个相互反向的差分信号组成,这样可以使得信号在传输过程中对干扰的抵抗能力更强。
因此,CAN总线可以在恶劣的工作环境下稳定地工作,保证通信的可靠性。
另外,CAN协议还具有较高的实时性。
CAN总线上的消息可以根据优先级来进行传输,优先级高的消息可以在总线空闲时立即发送,从而保证了消息的实时性。
这对于一些对通信时延要求较高的应用场景非常重要,比如汽车电子控制系统、工业自动化控制系统等。
此外,CAN协议还支持多主机系统,多个节点可以同时发送消息,而且不会发生冲突。
CAN协议采用了非破坏性位冲突检测和重发机制,可以确保消息的可靠传输。
这对于需要多个节点同时进行通信的系统来说非常重要。
总的来说,CAN协议作为一种高可靠性、实时性强、抗干扰能力强的串行通信协议,在汽车、工业控制、航空航天等领域得到了广泛的应用。
它的基本原理是基于总线的通信方式,采用了差分信号传输的方式,具有较高的实时性和支持多主机系统的特点。
希望本文对CAN协议有所了解,对相关领域的从业者有所帮助。
can 总线协议
can 总线协议CAN总线协议。
CAN(Controller Area Network)总线协议是一种串行通信协议,最初由德国Bosch公司在1986年提出,用于在汽车电子系统中进行通信。
随后,CAN总线协议被广泛应用于工业控制、航空航天、医疗设备等领域,成为一种重要的现代工业通信标准。
CAN总线协议采用了一种分布式控制的通信方式,它允许多个设备在同一总线上进行通信,而不需要主机的干预。
这种特性使得CAN总线协议非常适合于需要高可靠性和实时性的应用场景。
此外,CAN总线协议还具有抗干扰能力强、通信速率高、线缆成本低等优点,因此被广泛应用于工业领域。
CAN总线协议的通信基本单位是帧(Frame),每一帧包含了报文识别符(Identifier)、数据域(Data Field)和控制域(Control Field)。
在CAN总线协议中,存在两种不同的帧格式,分别为标准帧和扩展帧。
标准帧由11位报文识别符组成,而扩展帧由29位报文识别符组成,扩展帧的引入使得CAN总线协议具有更大的地址空间,更适合于复杂系统中的通信需求。
在CAN总线协议中,通信速率是一个非常重要的参数。
通信速率的选择需要考虑到系统的实时性要求、总线长度、总线负载等因素。
通常情况下,CAN总线协议支持的通信速率包括1Mbps、500kbps、250kbps、125kbps等多种选择,用户可以根据实际需求进行配置。
除了通信速率外,CAN总线协议还定义了错误处理机制,包括位错误、帧错误、格式错误、CRC错误等。
这些错误处理机制可以帮助系统及时发现通信异常,并进行相应的处理,保障系统的可靠性。
总的来说,CAN总线协议作为一种现代工业通信标准,具有高可靠性、实时性强、抗干扰能力强等优点,被广泛应用于工业控制、汽车电子、航空航天、医疗设备等领域。
随着工业自动化水平的不断提高,CAN总线协议在工业领域的应用前景将更加广阔。
CAN总线协议
CAN总线协议协议名称:Controller Area Network (CAN) 总线协议协议简介:Controller Area Network (CAN) 总线协议是一种用于在汽车和工业领域中传输数据的串行通信协议。
CAN总线协议最初由德国Bosch公司于1986年开发,并于1991年成为国际标准ISO 11898。
CAN总线协议具有高可靠性、实时性和容错性,被广泛应用于汽车电子系统、工业自动化、医疗设备等领域。
协议内容:1. 物理层CAN总线协议使用双绞线作为物理传输介质,支持两种传输速率:高速CAN (1 Mbps)和低速CAN(125 Kbps)。
双绞线的长度可以根据需求灵活调整,最大长度为40米。
CAN总线采用差分信号传输,其中一个线路为CAN_H(高电平表示逻辑1),另一个线路为CAN_L(低电平表示逻辑0)。
2. 数据帧格式CAN总线协议使用数据帧进行通信,数据帧由以下几个部分组成:- 帧起始位(SOF):用于标识数据帧的开始。
- 标识符(ID):用于区分不同的数据帧,包括标准帧和扩展帧两种类型。
- 控制位(Control):用于指定数据帧的类型和长度。
- 数据域(Data):用于传输实际的数据。
- CRC(Cyclic Redundancy Check):用于检测数据传输过程中的错误。
- 确认位(ACK):用于确认数据帧是否被成功接收。
- 结束位(EOF):用于标识数据帧的结束。
3. 数据帧类型CAN总线协议定义了四种不同类型的数据帧:- 数据帧(Data Frame):用于传输实际的数据。
- 远程帧(Remote Frame):用于请求其他节点发送数据。
- 错误帧(Error Frame):用于指示数据传输过程中的错误。
- 过载帧(Overload Frame):用于指示接收节点无法及时处理数据。
4. 数据传输CAN总线协议采用了一种基于优先级的访问机制,称为非冲突分配(Non-Destructive Arbitration)。
CAN总线协议
CAN总线协议协议名称:Controller Area Network(CAN)总线协议一、引言CAN总线协议是一种用于在汽车电子控制单元(ECU)之间进行通信的标准协议。
它提供了一种高效、可靠的通信方式,广泛应用于汽车行业。
本协议旨在规范CAN总线协议的通信规则、数据格式和错误处理机制,以确保系统的稳定性和可靠性。
二、范围本协议适用于所有使用CAN总线进行通信的汽车电子控制系统。
三、术语和定义1. CAN总线:Controller Area Network,是一种串行通信协议,用于在ECU之间进行数据传输。
2. 数据帧:CAN总线传输的数据单元,包含标识符、数据和控制位。
3. 标识符:用于标识数据帧的唯一值,包括优先级、源地址和目标地址等信息。
4. 数据:传输的实际数据内容。
5. 控制位:用于指示数据帧的类型和状态。
6. 仲裁:多个ECU同时发送数据帧时,通过比较标识符的优先级进行冲突解决。
四、通信规则1. 数据帧格式数据帧由以下几个部分组成:- 帧起始位(SOF):用于标识帧的开始。
- 标识符(ID):用于唯一标识数据帧。
- 控制位(Control):指示数据帧的类型和状态。
- 数据长度码(DLC):表示数据帧中数据的长度。
- 数据域(Data):实际传输的数据内容。
- 校验位(CRC):用于检测数据传输过程中的错误。
- 帧结束位(EOF):用于标识帧的结束。
2. 数据帧类型- 数据帧(Data Frame):用于传输实际数据。
- 远程帧(Remote Frame):用于请求其他ECU发送数据。
- 错误帧(Error Frame):用于指示数据传输过程中的错误。
3. 仲裁机制- 基于优先级的仲裁:每个数据帧的标识符包含优先级信息,优先级高的数据帧将优先发送。
- 仲裁段(Arbitration Phase):多个ECU同时发送数据帧时,通过比较标识符的优先级进行仲裁,优先级高的ECU将继续发送数据帧,而优先级低的ECU将暂停发送。
can协议解析
can协议解析CAN协议解析。
CAN(Controller Area Network)是一种串行通信协议,最初由德国Bosch公司开发,用于汽车内部的通信,后来被广泛应用于工业控制领域。
CAN协议具有高可靠性、实时性强、抗干扰能力强等特点,因此在汽车、工业控制、航空航天等领域得到了广泛的应用。
首先,CAN协议采用了非对称的差分信号线路,即CAN-H和CAN-L线,这种差分信号线路可以有效地抵抗电磁干扰,保证通信的稳定性。
此外,CAN协议还采用了非返回零制,即在一个位时间内,如果发送的是逻辑0,则保持总线电平不变;如果发送的是逻辑1,则在中间的时间段内翻转电平,这种编码方式可以减小总线上的电磁辐射,提高抗干扰能力。
其次,CAN协议支持两种工作模式,标准模式和扩展模式。
标准模式下,CAN帧由11位标识符组成,用于传输标准数据帧;扩展模式下,CAN帧由29位标识符组成,用于传输扩展数据帧。
这种设计可以满足不同应用场景下的通信需求,提高了CAN协议的灵活性和适用性。
此外,CAN协议还采用了基于优先级的非冲突数据传输机制。
在CAN总线上,每个节点都有自己的消息优先级,优先级高的消息会立即发送,而优先级低的消息会被暂时搁置。
这种机制可以保证重要数据的及时传输,提高了系统的实时性和可靠性。
另外,CAN协议还具有自动差错重发机制。
在CAN总线上,如果发生了数据传输错误,接收节点会发送一个错误帧进行通知,并且发送节点会自动重发数据,直到接收节点正确接收为止。
这种机制可以保证数据的可靠传输,提高了系统的稳定性和安全性。
总的来说,CAN协议作为一种高可靠、实时性强的串行通信协议,已经被广泛应用于汽车、工业控制、航空航天等领域。
它的差分信号线路、非返回零制、标准模式和扩展模式、基于优先级的非冲突数据传输机制、自动差错重发机制等特点,使得CAN协议在复杂的电磁环境和高可靠性要求下,能够保证数据的可靠传输和系统的稳定运行。
CAN总线教程详解
CAN总线教程详解CAN总线是一种现代的、高性能的通信总线技术,被广泛应用于汽车电子、工业控制、航空航天等领域。
CAN总线具有高可靠性、高带宽、低延迟等优点,能够满足实时性要求较高的应用场景。
本文将对CAN总线的基本原理、通信方式、物理层、协议以及应用进行详细介绍。
首先是CAN总线的基本原理。
CAN(Controller Area Network)总线是一种串行通信总线,其基本原理是利用差分信号传输数据,实现多个节点之间的通信。
CAN总线采用一种分布式的控制方式,多个节点可以同时进行发送和接收数据,而不会造成冲突。
此外,CAN总线还采用了一种优先级的机制,更高优先级的节点可以中断低优先级节点的传输,从而实现数据的有序传输。
接下来是CAN总线的通信方式。
CAN总线支持两种通信方式:广播和点对点。
在广播方式中,一个节点发送的数据可以被其他所有节点接收,而在点对点方式中,数据只能被指定的接收节点接收。
广播方式适用于需要向所有节点发送相同的数据的应用场景,而点对点方式适用于需要向指定节点发送数据的场景。
然后是CAN总线的物理层。
CAN总线的物理层采用了差分信号传输,即通过两根线分别传输正负两个相位相反的信号。
这种差分传输方式具有抗噪声能力强、抗干扰性好等优点。
CAN总线采用了标准的线缆以及连接器,可以实现节点间的高速可靠通信。
此外,CAN总线还具有自动的错误检测和纠正机制,能够实时检测线路的故障情况。
接下来是CAN总线的协议。
CAN总线采用了一种先进的帧格式,用于定义数据的传输规则。
每一帧包括了数据、标志位、ID等字段,多个帧组成了一个消息。
CAN总线使用了基于标识符的帧过滤机制,能够实现高效的消息传输。
此外,CAN总线还支持远程帧,即节点可以向其他节点发送请求,请求其发送指定的数据。
最后是CAN总线的应用。
CAN总线被广泛应用于汽车电子领域,用于汽车内部各个控制单元之间的通信。
例如,发动机控制单元、制动系统控制单元、仪表盘控制单元等可以通过CAN总线进行数据交互。
can协议完全讲解
can协议完全讲解Can协议完全讲解Can(Controller Area Network)协议是一种广泛应用于汽车和工业领域的通信协议。
它不仅仅是一种传输数据的方式,更是一种完整的通信体系,具备高度可靠性和实时性。
本文将从Can协议的基本原理、数据帧的结构、消息传输方式以及应用领域等方面进行详细讲解。
一、Can协议的基本原理Can协议是一种基于事件驱动的通信协议,它通过在总线上广播消息的方式进行通信。
Can总线上的所有节点都可以同时接收到发送的消息,但只有符合特定标识符的节点才会对消息做出响应。
这种方式使得Can协议具备高度的并发性和实时性。
二、数据帧的结构Can协议的数据帧由四个主要部分组成:起始位、标识符、控制域和数据域。
起始位用于标识一个数据帧的开始,标识符用于区分不同的消息类型,控制域用于控制数据帧的传输方式,数据域则是实际的数据内容。
三、消息传输方式Can协议采用了一种先进先出的消息队列机制来进行消息的传输。
每个节点都可以发送和接收消息,但发送的消息需要经过总线的仲裁机制来确定优先级。
如果多个节点同时发送消息,那么优先级高的节点将会获得总线的控制权,优先发送消息。
四、应用领域Can协议在汽车行业中得到了广泛的应用。
它可以用于汽车的各个系统之间的通信,如发动机控制、制动系统、车载娱乐系统等。
Can 协议还可以用于工业自动化领域,如机器人控制、传感器数据采集等。
总结:Can协议是一种广泛应用于汽车和工业领域的通信协议,它具备高度可靠性和实时性。
Can协议的基本原理是基于事件驱动的通信方式,通过在总线上广播消息的方式进行通信。
数据帧的结构包括起始位、标识符、控制域和数据域。
Can协议采用了先进先出的消息队列机制进行消息的传输,通过仲裁机制确定消息的优先级。
Can 协议在汽车和工业领域有着广泛的应用,可以用于各种系统之间的通信和数据传输。
以上就是对Can协议的完整讲解。
希望通过本文的介绍,读者对Can协议有了更加深入的了解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数器减1,接报文成功接收后,接收错误计数器减1,
有了如上规定之后,即可定义故障界定:一个节点如
果其错误计数值在1~127(含1、127)则为错误激活
节点;在128~255(含128、255)则为错误认可节点。
错误激活节点检测出错误时,发送活动错误标识。错
人民邮电出版社,2006.
[2]史久根,张培仁,陈真勇.CAN现场总线系统设计技术
[M].国防工业出版社,2004.
[3]求是科技.单片机通讯技术与工程实践[M].人民邮电出
版社,2005.
TheAnalysisofCANProtocol
Li Yuli
(ElectronicSchool ofJilinArchitectural andCivil EngineeringInstitute,Changchun130021,China)
应答错误:在应答间隙,发送节点未检测到显性
位。
当一个节点检测到一个CRC错误时,标识在应
答界定符之后发送,而其它错误在检测出错误的下
一位发送错误标识。
3.CAN总线故障界定及处理
每个CAN总线节点都设有发送出错记数器和
接收出错计数器。发送器送出一个错误标识时,发
送错误计数器加8,接收器检测出一个错误,接收错
这种总裁技术明显可以看出,在仲裁帧中,标识
符的二进制数值小者有较高优先级。换句话在诸多
竞争节点中,如果报文标识符的值最小,则此报文的
优先级最高。
3.控制场
控制场如图4所示。
图4控制场组成
IDE:在CAN2.0B标准格式IDE应为显性(隐性
用r表示)。
r0:保留位。
DLC3~DLC0:数据长度,最大数值为rddd(即隐
后,都在监视总线,当检测到一个隐性位后,再发送7
个隐性位,故错误界定符为8个隐性位。
2.CAN总线的错误类型
CAN总线有5种错误类型、它们互不排斥。
位错误:总线检测出某一位出错。
填充错误:使用填充方法进行编码为报文中,出
现6个连续相同的电平。
CRC错误:CRC值不匹配。
形式错误:固定的位场中出现非法位。
第3卷第3期
2008年9月
长春理工大学学报(高教版)
J ourn a l o f C h a ngc hun U ni v e r s it y of S c i e n ce a ndT ec hno l ogy(H i ghe r E duca ti onE d iti on)
Vol. 3 No. 3
CAN(Cont roll e r A rea N et work)是分布式实时控
制系统的串行通信局域网,称谓CAN总线。在数据
实时传输中,设计独特、低成本,具有高可靠性,得到
广泛应用。
本文着重解析C AN技术规范2.0B版的CAN
的分层结构规范和CAN报文结构规范。重点在于
充分理解CAN总线协议精髓,有助于CAN总线的
隐性位。
7.帧结束
由7个隐性位构成,表示一帧内容结束。
(二)远程帧
节点A如果索取B节点的数据时,则由A发送
远程帧,其A节点在仲裁场的标识符应为B节点的
标识符相同。
远程帧由帧起始位、仲裁场、控制场、CRC场、应
答场、帧结束6个场组成。它与数据帧的区别有:①
仲裁场的RTR位为隐性,标识此帧为远程帧;②无数
(1)仲裁场的组成
仲裁场如图3所示求RTR为一个显性
位。
(2)仲裁与优先级
CAN总线的通讯模式为:载波监测、多主掌控/
冲突(CSMA/CA)。这就使得总线上任一个节点向
总线发送信息的机会是均等的。只要总线空闲,谁
都可以发送。但如果在同一时刻有两上或两个以上
节点同时发送信息,这就发生冲突,这就需要仲裁,
而且获得仲裁的信息不受破坏。
CAN是按位进行仲裁。当节点向总线发送信息
同时,也在读取总线的电平。如果发送的电平与读
取的电平相同,则继续发送下一位,若不同则停止发
送,退出竞争。余下的节点继续重复上述过程,直到
总线上只剩下一个节点发送的电平。而在冲突中被
仲裁下的节点,待下一个总线空闲期再次尝试发送。
CRC序列的结束,为一位隐形位。CRC检验范围从
帧起始位开始直到数据场结束。其生成多项式为
15
+
14
+
10
+
8
+
7
+
4
+
3
+1。
6.应答场(ACK)
应答场为两位,如图6所示。
图6应答场组成
在应答场中发送节点送出2个隐性位,所有接
收到匹配CRC序列的节点,在应答间隙发送一个显
示位,以报告发送器接收无误。应答界定符为一个
显显显)。通常“显性”表示传输0,“隐性”表示传输
1,则最大数据为1000H,即8。
4.数据场
数据场即为被发送的数据,长度为0~8个字节,
取决于控制场中数据长度DL3~DL0。首先发送的
最高有效位。
5.CRC场
CRC场结构如图5所示。
图5 CRC场结构
CRC场由CRC序列和CRC界定符组成,CRC
序列为16位CRC检验码,CRC界定符用于标注
papergivesadetailedexplanationtoCANbusprotocol works.
Keywords:CANbus;recessivebit;dominant bit;node
183李玉丽:CAN总线协议解析第3期
显位组成)、认可错误标识(由6个隐位组成)。
当一个节点发出错误帧时,其出错标识为连续6
个显性位或连续6个隐性位。CAN总线规定使用填
充技术的编码不允许连续出现6个同状态电平,某
一节点标识传送后,其它节点由于总线上的连续电
平的出现,破坏帧格式,补发送错误标识,因此错误
标识叠加后占6~12位。各节点在发出错误标识之
局网设计、软件编程、局网维护。
一、C AN的分层结构
CAN遵从O SI
( Ope n Syste m I nte rc onnec ti on
Re fe re nce Mode l
)模型,其分层结构由高到低如图1
所示。
图1 C AN的分层结构
对应OSI模型为两层,实际为三层,即LLC、
MA C、PL S。由此而知,对应于CAN总线系统每个
Abstract:Thedevelopment andapplicationoffieldbuscausedthechangesforthetraditional control system.
Control LAN(CAN)busarewidelyusedinthefieldofautomaticcontrol .becauseoftheirowncharacteristicsThis
CAN总线协议解析
李玉丽
(吉林建筑工程学院电气与电子信息工程学院,吉林长春,130021)
摘要:现场总线的发展与应用引起了传统控制系统结构的改变。控制局域网(C AN)总线因其自身的特点被广泛应用于
自动控制领域。本文对C AN总线协议作了详尽解析。
关键词:C AN总线;隐性位;显性位;节点
中图分类号:T U 85文献标识码:A
格式。
(一)数据帧
数据帧携带由发送节点到接收节点(或发送器
到接收器),由7个不同的位场组成:帧起始位、仲裁
场、控制场、数据场、CRC场、应答场、帧结束。如图
2所示。
图2数据帧结构
CAN2.0B中存在两种不同的帧格式。主要区别
在于标识符的长度。具有11位标识符的帧称为标
准帧,具有29位标识符的帧称为扩展帧。本文只对
据场;③控制场中的PLC可为0~8的任意数值,但无
意义。
说明:对于仲裁场、控制场、数据场、CRC场、帧
间空间使用填充技术进行编码,即每5个同状态电
平插入一位与它相补的电平,还原时再予以删除。
(三)出错帧
1.出错帧格式
出错帧由2场组成,如图7所示。
图7出错帧结构
长春理工大学学报(高教版)182第3卷
错误标志具有两种形式:活动错误标识(由6个
对多点、全局广播、多点对一点,多点对多点等数据
传递方式。
各分层主要功能如下:
LLC层:接收滤波、超载通知、恢复管理;
MAC层:控制帧结构、执行仲裁、错误检测、出
错标定、故障界定。该层是CAN的核心;
PL S层:位编码/解码、位定时。
二、CAN总线的报文规范
CAN报文的传送有4种不同类型的帧结构,数
据帧、远程帧、出错帧、超载帧。CA B2.0B有4种帧
Sep. 2008
*收稿日期:2008 05 14
作者简介:李玉丽(1973),女,本科,实验师,研究方向为智能建筑电气设备远程监控。
标准帧进行解析。
1.帧起始标志位(SOF)
由一个显性位构成,表明某个节点开始发送信
息,所有其它节点必须与此同步(硬同步),但只有在
总线空闲时才允许起始位的发送。
2.仲裁场
误认可节点检测出错误时,发送认可错误标识;当错
误读数值大于或等于256时,总线关闭。错误计数
值大于96时,说明总线被严重干扰。
对于总线关闭的节点,在监测总线上11个连续
隐性位发生128次,则此节点总线启动,成为错误计
数器为零值的错误激活节点。
(四)超载帧
超载帧用于在接收节点未准备好的情况下请求
对数据帧或远程帧延时,由2个位场组成,见图8。
节点都是三层结构。数据发送节点数据流为LLC→