实验七 SIMULINK仿真集成环境
SIMULINK仿真集成环境

实验七SIMULINK 仿真集成环境一、实验目的熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容(1) SIMULINK 模型的创建和运行。
(2) 一阶系统仿真。
三、实验步骤1.Simulink 模型的创建和运行(1) 创建模型。
①在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MATLAB 菜单或库浏览器菜单中选择File|New|Model,或者单击库浏览器的图标,即可新建一个“untitle”的空白模型窗口。
③打开“Sources”模块库,选择“Sine Wave”模块,将其拖到模型窗口,再重复一次;打开“Math Operations”模块库选取“Product”模块;打开“Sinks”模块库选取“Scope”模块。
(2) 设置模块参数。
①修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
②双击下边“Sine Wave”模块,弹出参数对话框,将“Frequency”设置为100;双击“Scope”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes”为3。
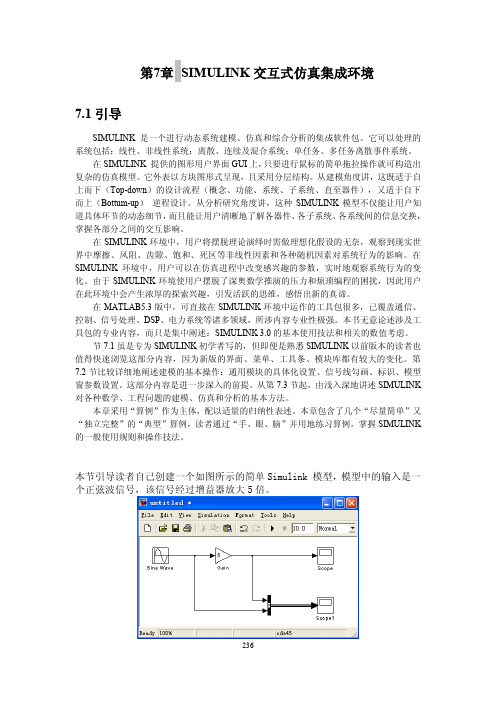
③如图A4 所示,用信号线连接模块。
(3) 启动仿真①单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope”模块弹出示波器窗口,可以看到波形图。
②修改仿真步长。
在模型窗口的Simulation 菜单下选择“Configuration Parameters”命令,把“Max step size”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size”为0.001;设置仿真终止时间为10s;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。
SIMULINK交互式仿真集成环境

SIMULINK交互式仿真集成环境简介SIMULINK是由MathWorks公司开发的一种基于模型的设计工具,被广泛用于工程中的仿真、建模和分析等方面。
本文将介绍SIMULINK交互式仿真集成环境的特点、功能和应用。
特点1. 图形化界面SIMULINK提供了直观的图形化界面,使用户可以轻松地建立模型、连接组件和设定参数。
2. 交互式仿真SIMULINK支持实时交互仿真,用户可以在模型运行的过程中观察结果并动态调整参数,使仿真更加灵活和实时。
3. 多种模块库SIMULINK包含了丰富的模块库,涵盖了各种工程领域的模型组件,用户可以快速搭建复杂模型并进行仿真分析。
4. 支持代码自动生成SIMULINK可以根据建立的模型自动生成对应的代码,方便用户将仿真结果应用到实际工程项目中。
功能1. 系统建模用户可以通过拖拽模块、线连接和参数设置,建立系统的数学模型。
2. 仿真分析SIMULINK提供了丰富的仿真分析工具,用户可以对模型进行动态仿真、频域分析、优化等操作。
3. 控制设计SIMULINK集成了控制系统设计工具,用户可以设计并优化闭环控制系统。
4. 协同工作多人可以同时使用SIMULINK进行协同工作,通过云存储共享和编辑模型。
应用领域1. 汽车行业SIMULINK在汽车行业中被广泛应用,包括引擎控制、车速控制、底盘控制等方面。
2. 电力系统电力系统的稳定性和控制可以通过SIMULINK进行建模和仿真分析。
3. 机器人控制机器人的运动规划、路径规划和控制系统设计都可以通过SIMULINK来实现。
总结SIMULINK作为一款强大的交互式仿真集成环境,为工程师和科研人员提供了一个方便、直观、灵活的建模和仿真平台。
通过本文的介绍,读者可以更加深入了解SIMULINK的特点、功能和应用领域,从而更好地利用这一工具进行工程设计和研究工作。
实验7 Simulink仿真技术

实验七Simulink仿真技术1 实验目的:了解对动态系统进行建模、仿真与分析工具-------Simulink掌握Simulink仿真的方法和步骤2 实验相关的知识重点:Simulink是MATLAB下的一个软件包。
使用Simulink进行仿真一般分为两步:1、在仿真模型编辑窗口中搭建好自己的仿真模型,设置好具体模型参数和仿真参数;2、开始仿真,Simulink将根据用户搭建的模型,模拟系统在用户设定条件下的具体行为。
一个典型的Simulink模型由信源、系统及信宿等3部分组成可,它们的关系如下图所示:信源提供系统的输入信号,如常量、正弦波、方波等;系统是对仿真对象的数学抽象,比如是连续线性系统,还是连续非线性系统?对输入信号进行求和,还是对输入信号进行一次调制:信宿是收信号的的部分,用户可以把它送到“示波器”中显示出来,或者保存到相应的mat文件中去。
一、模型文件操作Simulink所建立的模型文件的后缀名为*.mdl。
模型文件实际是一个结构化了的ASCII文件,它描述了模型的关键字和参数。
同MATLAB的M文件一样它可以进行新建、打开、保存、打印等操作。
二、模块的操作1. 模块的选定:2.模块大小的调整:3.模块方向的调整:4.模块位置的调整:5.模块的删除:6.模块参数的设置三、信号线的操作1.信号线的连接:2.信号线的折曲:3.折点的移动:4.信号线的删除:5.信号线的标签:6.信号线标签的传递:四、模型的注释建立Simulink模型应该养成添加模型注释的良好习惯。
方法是:在模型编辑窗任意位置双击鼠标左键,将弹出一个编辑窗,可以在其中写入注释内容。
在模块库浏览器中的Simulink结点下包含了搭建一个Simulink模型所需的基本模块,这些是首先应该掌握的。
下面主要对其中的Sources模块库、Sinks 模块库、Continuous模块库、Discrete模块库、Math Operations模块进行介绍。
第一章 动态仿真集成环境simulink
4,仿真结果分析 , 1)利用示波器模块(scope)得到输出结果 )利用示波器模块( ) 示波器模块窗口利用快捷键打开示波器参数对话框:调整坐标系及曲线显 示波器模块窗口利用快捷键打开示波器参数对话框:调整坐标系及曲线显 示; 游离示波器:可观察任模型窗口任一点的动态波形,与模块不通过连线, 游离示波器:可观察任模型窗口任一点的动态波形,与模块不通过连线, 使用方法:仿真前,打开游离示波器,鼠标左键点击窗口将其激活, 使用方法:仿真前,打开游离示波器,鼠标左键点击窗口将其激活,鼠标 左键点击待观察信号波形的连接线
动态仿真集成环境simulink 动态仿真集成环境
Simulink是matlab下用来对动态系统进行建模,仿真和分析的 是 下用来对动态系统进行建模, 下用来对动态系统进行建模 软件包,提供了一个图形化的用户界面 图形化的用户界面, 软件包,提供了一个图形化的用户界面,对于用方框图表示的 系统,通过图形界面,利用鼠标单击和拖拉方式, 鼠标单击和拖拉方式 系统,通过图形界面,利用鼠标单击和拖拉方式,建立系统模 型更直观,方便, 型更直观,方便,灵活 第六章p128 )(本第二章 )(本第二章 本第二章p47 ) (第六章 掌握利用Simulink模块集中的 模块集中的Simulink标准模块在用户模型 掌握利用 模块集中的 标准模块在用户模型 窗口建立控制系统模型, 窗口建立控制系统模型,标准模块参数的设置 了解仿真算法和参数的设置 仿真结果的三种处理方法:示波器输出( ),输出接口 仿真结果的三种处理方法:示波器输出(scope),输出接口 ), 模块( ),输出到工作空间模块 模块(out1),输出到工作空间模块(to workspace) ),输出到工作空间模块( ) 建立子系统, 建立子系统,子系统模型的封装
7.SIMULINK交互式仿真集成环境
开启空白(新建)模型窗 从模块库复制所需模块到空白(新建)模型窗 连接信号线 根据理论数学模型设置模块参数
增益模块参数设置 求和模块参数设置:+改为积分模块参数设置:x(0)=0.05m 仿真参数设置:采用默认参数
保存模型文件
引出示波器窗口,运行仿真模型
参数设置
练习1
实验内容1 搭建观察使用示波器观察正弦波信号 的基本仿真模型,其中正弦波频率为 100rad/s,幅度为-2V~2V。
SIMULINK模型窗的组成
工具条
仿真的启动或继续按钮 暂停按钮 结束仿真按钮 打开模块库浏览器按钮
状态栏 菜单栏
模型概念和文件操作
SIMULINK模型是什么
信源 系统 信宿
信源:可以是常数、正弦波、阶梯波等信号源 信宿:可以是示波器、图形记录仪等 系统:被研究系统的SIMULINK方框图 系统、信源、信宿,可以从SIMULINK模块库 中直接获得,也可以根据用户意愿用库中的模 块构搭而成 对于具体的SIMULINK而言,不一定完全包含 这三大组件
在视觉上:直观的方框图 在文件上:扩展名为MDL的ASCII代码 在数学上:体现了一组微分方程或差分方程 在行为上:模拟了物理器件的构成的实际系 统的动态性状
SIMULINK模型的3种宏观组件:信源 (Source)、系统(System)、信宿(Sink)
模型概念和文件操作
SIMULINK模型的一般结构
基本组件模块组在Simulink一项下,其余均为专门 工具包 Simulink基本组件模块组下包括各类基本组件子模 块库,每类基本组件子模块库包含了许多基本组件
SIMULINK动态仿真集成环境(ppt41张)
2. 模块的属性设置 选定要设置属性的模块,然后在模块上按鼠 标右键并在弹出的快捷菜单中选择Block properties,或先选择要设置的模块,再在模型 编辑窗口的Edit菜单下选择Block properties命 令,将打开模块属性对话框。该对话框包括 General、Block annotation和Callbacks 3个可以 相互切换的选项卡。其中选项卡中可以设置3个 基本属性:Description(说明)、Priority(优先 级) 、Tag(标记)。
07.03.2019 16
例10-2 利用Simulink仿真曲线。 仿真过程如下: (1) 启动Simulink并打开模型编辑窗口。 (2) 将所需模块添加到模型中。 (3) 设置模块参数并连接各个模块组成仿真模 型。 设置模块参数后,用连线将各个模块连接起 来组成仿真模型。 (4) 设置系统仿真参数。 (5) 开始系统仿真。 (6) 观察仿真结果。
07.03.2019
15
10.3.2 启动系统仿真与仿真结果分析
设置完仿真参数之后,从Simulation中选择Start菜单 项或单击模型编辑窗口中的Start Simulation命令按钮, 便可启动对当前模型的仿真。此时,Start菜单项变成 不可选, 而Stop菜单项变成可选, 以供中途停止仿真使 用。从Simulation菜单中选择Stop项停止仿真后,Start 项又变成可选。 为了观察仿真结果的变化轨迹可以采用3种方法: (1) 把输出结果送给Scope模块或者XY Graph模块。 (2) 把仿真结果送到输出端口并作为返回变量,然后使 用MATLAB命令画出该变量的变化曲线。 (3) 把输出结果送到To Workspace模块,从而将结果直 接存入工作空间,然后用MATLAB命令画出该变量的 变化曲线。
2 matlab 第7章 SIMULINK交互式仿真集成环境08
4. 仿真模块窗口中的模块调整 改变模块位置:用鼠标选取要移动的模块,按下左键并保持,拖动模块至期 望位置,然后松开鼠标。改变模块大小:用鼠标选取模块,并对其中任意四 角的小方块出现斜双向箭头,拖动鼠标即可改变模块大小。改变模块方向:
239
选中模块后,选取菜单[Format:Rotate Block],或者按快捷键 Ctrl+R,可 使模块旋转 90°,改变模块的输入输出端口方向。 5.模块参数设置 用鼠标双击指定模块图标, 打开模块参数设置对话框,根据对话框栏目中提供的 信息进行参数设置或修改。例如,要将仿真模型窗口中的标准传递函数模块,设 10 置为 2 ,双击该传递函数模块,在弹出的参数设置对话框中输入实际的传递函 s 1.4 s 10
(3)仿真操作 (4)保存在 MATLAB 工作空间中的数据
clf tt=ScopeData.time; xx=ScopeData.signals.values; [xm,km]=max(xx); %为书写简单,把构架域的时间数据另赋给 tt %目的同上。
plot(tt,xx,'r','LineWidth',4),hold on plot(tt(km),xm,'b.','MarkerSize',36),hold off strmax=char('最大值',['t = ',num2str(tt(km))],['x = ',num2str(xm)]); text(6.5,xm,strmax),xlabel('t'),ylabel('x')
0.9 0.8 0.7 0.6 0.5 × î ´ ó Öµ t = 4.9144 x = 0.80152
MATLAB基础-simulink交互式仿真集成环境
阶跃信号模块的参数
MATLAB与通信仿真
Simulink
从工作空间获取数据(From workspace)参数设置
t=0:0.1:10; y=sin(t); t=t'; y=y';
“Data” 矩 阵 的 列 数 应等于输入端口的个 数+1,第一列自动当 成时间向量,后面几 列依次对应各端口
MATLAB与通信仿真
Simulink
1.2 建立Simulink仿真模型 e) 模块参数设置 用鼠标双击指定模块图标,打开模块对话框,根据对话框栏 目中提供的信息进行参数设置或修改。 例如双击模型窗口的传递函数模块,弹出图示对话框, 在对话框中分别输入分子、分母多项式的系数,点击OK 键,完成该模型的设置,如右下图所示:
From workspace参数设置
Simulink
从文件获取数据(From file) 参数设置
t=0:0.1:2*pi; y=cos(t); y1=[t; y]; save Ex0702 y1
MATLAB与通信仿真
From File参数设置
Simulink
传递函数(Transfer function) 参数设置
•
MATLAB与通信仿真
Simulink
1 Simulink 基本操作
1.3 系统仿真运行 1. Simulink模型窗口下仿真 步骤 ① 打开Simulink仿真模型窗口,或打开指定的.mdl文件; ② 设置仿真参数:在模型窗口选取菜单【Simulation: Parameters】, 弹出 “Configration Parameters” 对话框,设置仿真参数,然后 按【OK】即可;
MATLAB与通信仿真
Simulink
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验七 SIMULINK 仿真集成环境
一、实验目的
熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容
(1) SIMULINK 模型的创建和运行。
(2)一阶系统仿真
三、实验步骤
1. Simulink 模型的创建和运行
(1) 创建模型。
① 在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MA TLAB 菜单或库浏览器餐单中选择File|New|Model ,或者单击库浏览器的图标,即可新建一个“untitle ”的空白模型窗口。
③打开“Sources ”模块库,选择“Sine Wave ”模块,将其拖到模型窗口,再重复一次;打开“Math Operatioins ”模块库选取“Product ”模块;打开“Sinks ”模块库选取“Scope ”模块。
(2) 设置模块参数
① 修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
② 双击下边“Sine Wave ”模块,弹出参数对话框,浆“Frequency ”设置为100;双击“Scope ”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes ”为3.
③如图所示,用信号线连接模块。
(3) 启动仿真
① 单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope ”模块弹出示波器窗口,可以看到波形图。
② 修改仿真步长。
在模块窗口的Simulation 菜单下选择“Configuration Parameters ”命令,把“Max step size ”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size ”为0.001;设置仿真终止时间为10s ;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。
浆示波器的参数对话框打开,选择“Data history ”页,把“Limit data point tolast ”设置为10000;再次启动仿真,观察示波器将看到完整的波形。
2.. 一阶系统仿真 使用阶跃信号作为输入信号,经过传递函数为1
6.01 s 的一阶系统,观察其输出。
①设置“Step ”模块的“Step time ”为0;浆仿真参数的最大步长“Max step size ”设置为0.01.
把结果数据输出到工作空间。
②打开“Sources ”模块库,选取“Clock ”模块添加到模型窗口中。
③代开“Sinks ”模块库,选取两个“To workspace ”模块添加到模型窗口中,两个模块分别连接输出和“Clock ”模块。
设置“To workspace”模块参数,设置“V ariable name”分别为y和t,如图所示。
启动仿真后,在工作空间可以有两个结构体y和t。
在命令窗口输入如下命令:>> y1=y.signals.values;
>> t1=t.signals.values;
>> plot(t1,y1)。