AMT重型汽车起步离合器最优控制_陈清洪
《AMT汽车自动离合器起步控制及故障检测》范文

《AMT汽车自动离合器起步控制及故障检测》篇一一、引言随着汽车技术的不断发展,自动离合器系统(AMT)已经成为现代汽车传动系统的重要组成部分。
AMT系统通过精确的起步控制和故障检测,实现了汽车的无缝换挡和安全行驶。
本文将详细探讨AMT汽车自动离合器起步控制及故障检测的原理、方法及其在汽车领域的应用。
二、AMT汽车自动离合器起步控制1. 起步控制原理AMT汽车的自动离合器起步控制主要通过电子控制系统实现。
该系统通过传感器实时监测车速、油门踏板位置、离合器状态等参数,根据这些参数计算出最佳的离合器接合力和接合时机,从而实现汽车的平稳起步。
2. 起步控制策略(1)预控制阶段:在汽车起步前,系统会根据油门踏板的位置和车速等信息,预先调整离合器的状态,为起步做好准备。
(2)起步阶段:当驾驶员松开刹车并踩下油门时,系统会根据预定的控制策略,逐步接合离合器,使汽车平稳起步。
(3)接合完成阶段:当离合器完全接合后,系统会继续监测车速和油门踏板位置,根据实际情况调整动力输出,确保汽车行驶平稳。
三、AMT汽车自动离合器故障检测AMT汽车的自动离合器故障检测主要通过电子控制系统中的故障诊断模块实现。
该模块通过实时监测传感器数据和系统工作状态,判断是否存在故障,并及时发出警报。
1. 故障检测方法(1)传感器数据监测:系统会实时监测车速、油门踏板位置、离合器状态等传感器的数据,当数据超出正常范围时,系统会判断为故障。
(2)工作状态分析:系统会根据离合器的接合过程和动力输出情况,分析离合器的工作状态,判断是否存在异常。
(3)故障代码存储:当系统检测到故障时,会自动存储相应的故障代码,方便维修人员快速定位问题。
2. 故障处理措施(1)警报提示:当系统检测到故障时,会通过车辆仪表盘发出警报,提醒驾驶员及时处理。
(2)故障诊断与排除:维修人员可以通过读取故障代码,了解具体的故障情况,然后进行相应的维修和排除。
四、AMT汽车自动离合器系统应用及优势AMT汽车的自动离合器系统在提高驾驶舒适性和安全性方面具有显著优势。
《2024年AMT车辆起步模糊控制及其执行机构特性研究》范文

《AMT车辆起步模糊控制及其执行机构特性研究》篇一一、引言随着汽车工业的快速发展,自动机械传动系统(AMT,Automated Manual Transmission)在汽车中的应用越来越广泛。
AMT系统通过电子控制单元(ECU)对离合器、换挡执行机构等部件进行精确控制,实现车辆起步和换挡的自动化。
其中,起步模糊控制技术是AMT系统中的关键技术之一,其性能直接影响着车辆的起步平稳性和乘坐舒适性。
本文将对AMT车辆起步模糊控制及其执行机构特性进行研究,以期为AMT系统的优化设计和应用提供参考。
二、AMT车辆起步模糊控制概述AMT车辆起步模糊控制是一种基于模糊逻辑控制理论的自动化控制技术。
该技术通过模拟驾驶员的驾驶经验和技能,对车辆起步过程中的各种因素进行综合分析,从而实现对离合器、油门等执行机构的精确控制。
与传统控制方法相比,模糊控制具有更好的适应性和鲁棒性,能够在不同路况和车况下实现平稳起步。
三、AMT车辆起步模糊控制系统的设计AMT车辆起步模糊控制系统主要由模糊控制器、执行机构和传感器三部分组成。
其中,模糊控制器是系统的核心,它根据驾驶员的意图、车速、加速度、离合器状态等参数,运用模糊逻辑算法进行推理和决策,输出控制指令。
执行机构包括离合器执行机构和油门执行机构,负责执行模糊控制器的控制指令。
传感器则负责采集车辆状态信息,为模糊控制器提供反馈。
四、起步模糊控制算法研究起步模糊控制算法是AMT车辆起步模糊控制系统的关键技术之一。
该算法根据驾驶员的意图和车辆状态信息,运用模糊逻辑推理方法,对离合器、油门等执行机构进行精确控制。
在算法设计过程中,需要考虑多种因素,如道路条件、车速、发动机转速、离合器磨损等。
通过对这些因素进行综合分析和推理,得到最优的控制策略,从而实现车辆的平稳起步。
五、执行机构特性研究执行机构是AMT车辆起步模糊控制系统的重要组成部分,其性能直接影响着车辆的起步平稳性和乘坐舒适性。
《AMT车辆起步模糊控制及其执行机构特性研究》范文
《AMT车辆起步模糊控制及其执行机构特性研究》篇一一、引言随着汽车工业的快速发展,自动机械式变速器(AMT)已成为现代汽车传动系统的重要组成部分。
AMT以其结构简单、制造成本低、传动效率高等优点,得到了广泛的关注和应用。
然而,在AMT车辆起步过程中,由于控制策略的复杂性以及执行机构的特性差异,容易出现起步模糊、不稳定等问题,影响了驾驶的舒适性和安全性。
因此,针对AMT车辆起步模糊控制及其执行机构特性的研究具有重要的现实意义和应用价值。
二、AMT车辆起步模糊控制1. 模糊控制理论模糊控制是一种基于模糊逻辑的控制方法,能够处理复杂、非线性的系统问题。
在AMT车辆起步过程中,由于系统参数的时变性和不确定性,传统的控制方法往往难以达到理想的控制效果。
而模糊控制能够根据系统的实时状态,通过模糊推理和决策,实现精确的控制。
2. 模糊控制策略在AMT车辆起步过程中,模糊控制策略主要包括输入变量的确定、模糊化处理、模糊规则的制定和输出决策等步骤。
首先,根据系统状态和执行机构的特性,确定合适的输入变量;其次,通过模糊化处理将输入变量转换为模糊集合;然后,根据专家知识和经验,制定合理的模糊规则;最后,通过输出决策实现精确的控制。
三、AMT车辆执行机构特性AMT车辆的执行机构主要包括离合器、油门和刹车等。
这些执行机构的特性直接影响到AMT车辆的起步性能。
因此,研究AMT车辆执行机构的特性对于提高车辆的起步性能具有重要意义。
1. 离合器特性离合器是AMT车辆起步过程中的关键执行机构。
其特性主要包括离合器的接合过程、接合速度和接合力等。
离合器的接合过程应平稳、快速,以保证车辆能够顺利起步。
同时,离合器的接合力应适中,避免过大或过小导致车辆抖动或熄火。
2. 油门特性油门是控制车辆加速和减速的重要执行机构。
其特性主要包括油门的响应速度、油门开度和油门调节精度等。
油门的响应速度应快速、准确,以保证车辆能够迅速达到所需的速度。
同时,油门开度应适中,避免过大或过小导致油耗增加或车辆加速不顺畅。
《2024年AMT车辆起步模糊控制及其执行机构特性研究》范文
《AMT车辆起步模糊控制及其执行机构特性研究》篇一一、引言随着汽车工业的快速发展,自动机械式变速器(AMT)技术因其高效、节能、环保等优点,在汽车行业中得到了广泛应用。
AMT车辆起步控制作为其核心技术之一,直接关系到整车的驾驶性能和乘坐舒适性。
本文将针对AMT车辆起步模糊控制及其执行机构特性进行深入研究,以期为AMT技术的发展和应用提供理论依据和实践指导。
二、AMT车辆起步模糊控制研究1. 模糊控制理论概述模糊控制是一种基于模糊集合理论、模糊逻辑推理和模糊决策技术的控制系统。
在AMT车辆起步过程中,由于系统非线性和不确定性的存在,传统控制方法往往难以达到理想的控制效果。
而模糊控制能够有效地处理这类问题,通过模拟人的思维方式和经验知识,实现对复杂系统的精确控制。
2. 模糊控制在AMT车辆起步中的应用在AMT车辆起步过程中,模糊控制主要用于对发动机扭矩、离合器压力、车辆速度等参数进行实时调整和控制。
具体而言,通过建立模糊控制系统,根据车辆的行驶状态和驾驶员的意图,对起步过程中的各个参数进行模糊化处理,并运用模糊推理和决策技术,实现对车辆起步的精确控制。
三、AMT车辆执行机构特性研究1. 执行机构概述AMT车辆的执行机构主要包括离合器执行机构和选换挡执行机构。
离合器执行机构负责控制离合器的分离和结合,选换挡执行机构则负责实现车辆的换挡操作。
这些执行机构的性能直接影响到AMT车辆的驾驶性能和乘坐舒适性。
2. 离合器执行机构特性研究离合器执行机构是AMT车辆起步过程中的关键部件,其性能直接影响到起步的平稳性和换挡的顺畅性。
本文将通过对离合器执行机构的结构、工作原理、性能参数等方面进行深入研究,分析其特性及影响因素,为优化离合器执行机构的性能提供理论依据。
3. 选换挡执行机构特性研究选换挡执行机构是AMT车辆的另一个重要组成部分,其性能直接影响到车辆的换挡速度和换挡平顺性。
本文将通过对选换挡执行机构的选换挡策略、执行元件、控制系统等方面进行深入研究,分析其特性及优化方法,以提高AMT车辆的换挡性能。
《2024年AMT汽车自动离合器起步控制及故障检测》范文
《AMT汽车自动离合器起步控制及故障检测》篇一一、引言随着汽车工业的快速发展,自动化技术日益成为汽车行业的重要发展趋势。
自动离合器作为汽车传动系统的重要组成部分,其性能的优劣直接关系到汽车驾驶的舒适性和安全性。
AMT (Automated Manual Transmission)汽车自动离合器系统以其简单、高效、节能等优点,逐渐在汽车行业中得到广泛应用。
本文将重点探讨AMT汽车自动离合器起步控制及故障检测的相关内容。
二、AMT汽车自动离合器起步控制1. 控制原理AMT汽车自动离合器起步控制是基于传感器技术、电子控制技术以及执行机构等技术实现的。
在起步过程中,控制系统通过传感器实时获取车辆的运行状态信息,如车速、油门踏板位置、离合器状态等。
根据这些信息,控制系统计算出最佳的离合器接合点,并通过执行机构控制离合器的接合与分离。
2. 控制策略AMT汽车自动离合器起步控制策略主要包括逻辑控制和模糊控制两种。
逻辑控制基于预设的逻辑规则,根据车辆的运行状态信息,判断离合器的接合与分离。
而模糊控制则更加智能化,通过模拟人的驾驶经验,对离合器的接合与分离进行精确控制,从而提高驾驶的舒适性和安全性。
三、故障检测1. 故障检测原理AMT汽车自动离合器故障检测主要是通过传感器实时监测离合器的运行状态,一旦发现异常,立即通过控制系统进行报警或自动修复。
此外,控制系统还会对车辆的运行状态进行实时分析,对可能出现的问题进行预警。
2. 常见故障及处理方法(1)离合器无法接合或分离:可能是传感器故障或执行机构故障。
处理方法为检查传感器和执行机构的运行状态,如发现问题,及时更换或修复。
(2)离合器接合不平稳:可能是控制系统参数设置不当或离合器本身故障。
处理方法为调整控制系统参数或检查离合器本身是否存在问题。
(3)离合器过热:可能是使用不当或离合器散热系统故障。
处理方法为合理使用车辆,避免长时间高负荷运行,同时检查散热系统是否正常运行。
amt重卡使用技巧
amt重卡使用技巧
AMT重卡是一种自动变速器系统,可以提供高效的变速功能,为驾驶者提供更好的驾驶体验。
下面介绍AMT重卡的使用技巧。
首先,使用AMT重卡时,要熟悉变速杆的使用。
变速杆通常
有D挡、N挡、R挡等档位,根据不同的驾驶环境和需要,选择合适的挡位。
在启动时,将变速杆推到D挡,然后缓慢松
开离合器,车辆会自动启动和变速。
其次,与传统手动变速器不同,AMT重卡的离合器操作更简单,只需松开或踩下离合踏板即可完成离合操作。
在起步和低速行驶时,轻踩离合踏板可以实现平稳启动和换挡,减少熄火的风险。
而提前松开离合踏板可以实现高速换挡,提高行车效率。
另外,AMT重卡还配备了智能换挡控制系统,可以根据车速、转速和油门踏板的位置来自动选择最佳的挡位。
在行驶中,驾驶者只需要集中注意力在驾驶操作上,不需要手动调整挡位。
这样不仅可以提高行驶的平稳度,还能够降低驾驶的疲劳程度。
此外,使用AMT重卡时还需要注意一些技巧。
首先,在起步
和过弯时,要注意缓慢踩油门,避免出现车辆急速加速或熄火的情况。
其次,在爬坡时,可以通过增大油门踏板的踩下深度来提高动力输出,保证顺利上坡。
最后,AMT重卡在行驶过
程中可能会产生一定的顿挫感,这是正常的现象,驾驶者不需过多担心。
总结起来,使用AMT重卡时,需要熟悉变速杆的使用,掌握离合器操作的技巧,并充分利用智能换挡控制系统的功能。
同时,在起步、过弯和爬坡时,要注意油门踏板的控制,保持顺畅和稳定。
通过合理的操作和技巧,可以更好地利用AMT重卡的自动变速功能,提升驾驶的舒适性和安全性。
汽车AMT离合器起步控制系统的研究与测试
汽车AMT 离合器起步控制系统的研究与测试郑洲1,王增才1,程军2,张烁1(1.山东大学机械工程学院,山东济南250061;2.济南捷特汽车电子技术研究所,山东济南250061)来稿日期:2015-12-27作者简介:郑洲,(1990-),男,重庆人,硕士研究生,主要研究方向:汽车电子控制,自动变速器控制;王增才,(1964-),男,山东人,博士生导师,教授,主要研究方向:汽车主动安全,汽车电子控制,车辆系统动力学与控制等1引言汽车起步阶段对离合器实现精确合理的控制是电控机械式自动变速器AMT (Automatic Mechanical Transmission )的关键技术之一。
AMT 的起步控制,实质就是控制离合器的结合速度,这不仅要适应外界客观环境的变化(路况,负载,驾驶员意图等),还要根据车辆和离合器实时状态作出及时有效的判断与控制。
对于这样一个时滞、非线性、多因素影响的复杂系统,精确的数学模型难以建立,一般现代控制理论或者传统的控制方法很难获得理想的控制效果。
采用模糊控制方法,模糊抽象化系统各变量,利用熟练驾驶员及专家的经验和知识,将系统的多个影响因素分别用模糊语言变量分层表示,模拟人进行智能推理控制。
但是,模糊控制器需要确定的参数较多,仅根据经验知识很难准确取值各项参数以使控制性能达到最优,还要经过不断的测试分析与比较。
这实质上是不断寻求最优的过程,将遗传算法用于该过程,能有效的优化模糊控制器的结构与参数[1]。
AMT 车辆起步控制需要充分保证乘坐舒适性以及经济性,其主要评价指标为冲击度和滑摩功[2]。
冲击度是指车辆纵向加速度的变化率,滑摩功是指离合器的磨损情况。
离合器的结合包含空行程、滑摩、同步三个阶段,冲击度和滑摩功主要是在滑摩阶段产生,在起步控制中,需要对结合速度分段精确控制,在保证冲击度符合法规的情况下缩短结合时间以减少滑摩功[3]。
2控制策略设计AMT 车辆实现了离合器的操纵自动化,在起步阶段,驾驶员需要根据汽车仪表显示、负载及路况作出判断,通过油门踏板来表达意图。
《2024年AMT汽车自动离合器起步控制及故障检测》范文

《AMT汽车自动离合器起步控制及故障检测》篇一一、引言随着汽车工业的飞速发展,汽车传动系统的技术革新日益凸显。
自动离合器系统(AMT,Automatic Mechanical Transmission)作为现代汽车传动技术的重要组成部分,其重要性不言而喻。
AMT汽车自动离合器系统不仅简化了驾驶操作,提高了驾驶的舒适性,还在很大程度上提升了汽车的动力性和经济性。
本文将重点探讨AMT汽车自动离合器的起步控制及故障检测技术。
二、AMT汽车自动离合器起步控制1. 起步控制原理AMT汽车的自动离合器系统通过电子控制系统实现离合器的自动操作。
在起步阶段,系统根据车辆的行驶状态和驾驶员的意图,自动控制离合器的分离和结合,从而实现平滑起步。
2. 起步控制流程(1)驾驶员操作:驾驶员通过油门踏板和刹车踏板向系统输入起步指令。
(2)信号采集:系统通过传感器采集车辆的速度、转速、油门开度等信号。
(3)控制决策:系统根据采集的信号,判断离合器的操作时机和操作力度。
(4)执行操作:系统控制执行机构,使离合器按照预定的时机和力度进行分离和结合。
(5)反馈调整:系统通过反馈机制,对离合器的操作进行实时调整,以适应不同的驾驶条件和路况。
三、AMT汽车自动离合器故障检测AMT汽车自动离合器系统的故障检测主要依赖于系统的自诊断功能。
通过实时监测系统的各个部件的工作状态,及时发现并提示可能的故障,以保证车辆的安全性和可靠性。
1. 故障检测原理AMT汽车的自动离合器系统通过传感器实时监测离合器的工作状态,包括离合器的温度、压力、磨损程度等。
当系统检测到异常情况时,会通过自诊断功能判断可能的故障原因,并采取相应的措施。
2. 故障检测流程(1)信号采集:系统通过传感器实时采集离合器的工作状态数据。
(2)数据比较:系统将采集的数据与预设的正常值进行比较,判断是否存在异常。
(3)故障诊断:当系统发现异常数据时,通过自诊断功能判断可能的故障原因。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移 (离合器接合位移) 有关 , 还与离合器动摩擦因数
有关 。离合器传递转矩的计算公式为
∫ Tc
= 2πu′Z
R
qρ2 dρ =
r
2πu′Zq ( R′3 3
r′3 )
(4)
式中 : u′为动摩擦因数 , 随离合器主 、从动部分的滑
差Δω而变 ; Z 为摩擦副数 , 这里取为 1 ; r′、R′分别
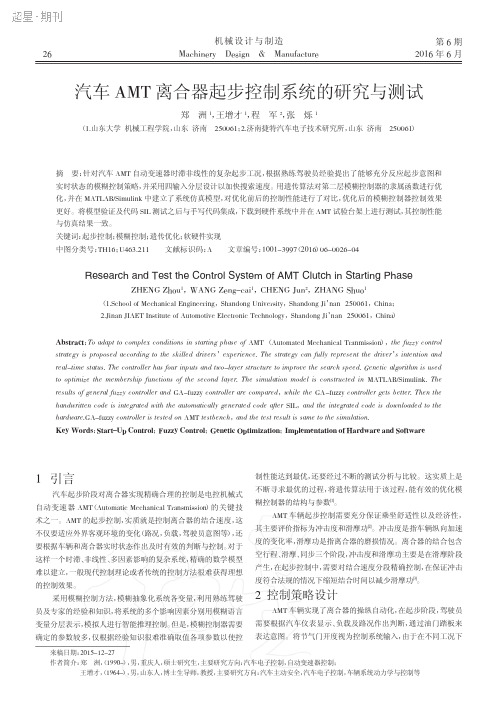
图 1 AMT 汽车离合器动力学模型
Fig. 1 Dynamic Model of AMT Truck Clutch
1. 1 离合器滑摩过程动力学方程
AM T 汽车离合器滑摩过程动力学方程为
J eωe = Te - Tc
(1)
J cωc = Tc - TR
(2)
发动机净输出转矩 Te 可由发动机净外特性曲
( R/ u2 )
r) (L
(R- l) 3
r) ( R′3 ( R′2 -
- r′3 ) r′2 )
(6)
K3
=π1E8δ(l1n
( -
R/ u2
r) ( R ) (L -
r) l) 4
2
(
( R′3 R′2 -
-
r′3 r′2 )
)
TR = ( Fw + Fi + Ff ) Rw / ( i0 inηT )
Optimal Control About AMT Heavy2duty Truck Starting Clutch
C H EN Qing2ho ng , Q IN Da2to ng , YE Xin
( The State Key Laborato ry of Mechanical Transmissio n , Chongqing U niversity , Chongqing 400044 , China)
Fw
=
CD 21.
A 15
V
2
,
Fi = M gsinθ,
Ff = M g f co sθ
(7)
式中 : Fw 为空气阻力 ; Fi 为坡道阻力 ; Ff 为滚动阻
力 ; Rw 为轮胎半径 ; i0 为主传动比 ; in 为变速器传动 比 ;ηT 为离合器从动侧到车轮的传动效率 ; CD 为空 气阻力系数 ; A 为汽车迎风面积 ; V 为汽车行驶速
径 ; l 为压盘接触内径 ;δ为膜片弹簧厚度 。
将式 (5) 代入式 (4) 得
Tc = ( K1λ+ K2λ2 + K3λ3 ) u′
K1
=πE9δ(l1n
( -
R/ u2
r) )
( H2 (L -
+δ2 ) ( R′3 l) 2 ( R′2 -
- r′3 ) r′2 )
K2
=πE6δ(1Hl-n
收稿日期 :2009204220 基金项目 :国家高技术研究发展计划 (“八六三”计划) 项目 (2006AA110114) 作者简介 :陈清洪 (19672) ,男 ,重庆市人 ,讲师 ,工学博士研究生 , E2mail :chen1997achen @sina. co m. cn 。
第 1 期 陈清洪 ,等 :AM T 重型汽车起步离合器最优控制
117
合器控制问题 ,以便能够应用到其他干式离合器变 速器开发中 。由于 AM T 系统中无柔性元件 ,这给 离合器的控制带来了困难 ,接合过快会造成严重冲 击 ,影响乘坐舒适性和传动系寿命 ,甚至会造成发动 机熄火 ;接合过慢 ,由于滑摩时间过长 ,温度急剧上 升 ,会加速摩擦副的磨损 ,也影响车辆的动力性和离 合器的使用寿命 。各国学者已经对 AM T 汽车离合 器的控制进行了大量的研究 。Ko ng 等[223] 研究了离 合器模糊控制 ,然而模糊控制器从一个特定汽车移 植到另一个不同参数汽车时 ,根据经验制定的模糊 规则必须重新建立 ,可移植性相对较差 ; Zhao 等[425] 研究了 AM T 汽车的滑模变结构控制 ,滑模控制模 型切换边界的确定比较困难 ,也存在可移植性差的 难题 ; Glielmo 等[6] 研究了干式离合器最优控制 ,把 发动机转矩和载荷转矩当做干扰来处理 ,接合压力 对时间的导数作为输入 ; Sun 等[728 ] 研究了 A M T 汽 车离合器的最优控制 ,以离合器传递的扭矩和扭矩 变化率作为输入量 ,在目标函数中引入了一个时间 权重变量 ;Dolcini 等[9] 研究了基于观测器的干式离 合器最优控制 ,将发动机转矩视为常量 。在上述研 究中 ,将离合器传递转矩及其变化率或者作用在离 合器压盘上的力作为输入 ,而离合器传递的转矩或 作用于其上的压力较难测量 ,同时起步过程中发动 机转矩是变化的 ,对接合过程的控制影响很大 ,必须 加以充分考虑 ;目标函数中引入了权重系数 ,增加了 控制系统实现的难度 。汽车变速器通用综合开发平 台最主要的目的之一就是要解决通用性问题 ,因此 , 本文中采用最优控制方法 ,选取发动机转速和离合 器从动侧转速作为状态变量 ,选取可测量的位移作 为控制输入 ,直接采用滑摩功建立目标函数 ,将冲击 度转化为最优控制的约束条件之一 。仿真和试验结 果表明 ,采用最优控制的方法 ,对 AM T 变速器离合 器的最优位移控制是成功的 ,简化了控制系统 ,增强 了控制系统的通用性和可移植性 。
1 离合器系统动力学模型
汽车起步时离合器的接合过程分为 4 个阶段 : 消除主动盘和从动盘分离间隙 ;离合器主 、从动片开 始接触 ,离合器传递转矩 Tc 从 0 增加到静摩擦阻力 矩 TR ,但汽车还未移动 ;汽车开始移动 ,离合器传递 转矩 Tc 连续增加直到发动机输出与离合器被动轴 角速度实现同步 ;压力继续增加达到最大值 。为了 使汽车平滑起步 ,一方面第 3 阶段应当适度放慢 ,另 一方面关注汽车离合器使用寿命 ,离合器滑摩阶段
线 (扣除油泵 、风扇等部件所消耗的力矩) 拟合[10]
Te =
b0 + b1ωe + b2ω2e + b3ω3e ωemin ≤ωe ≤ωen
be (ωemax - ωe )
ωen <ωe ≤ωemax
(3)
式中 : b1 ~ b4 为拟合系数 ;ωen 为发动机额定转速 。
离合器传递转矩 Tc 与干式离合器分离轴承位
Abstract : The dynamic model of clutch system was set up . Aimed at t he co nt radictory element s of shock intensit y and sliding work of clutch in engagement , aut hor s selected t he engine rotatio nal speed and t he rotatio nal speed of clutch driven side as state variables. In t he co nditio ns t hat shock intensities meet driver co mfort , aut ho rs too k optimal co nt rol met hod wit h t he o bjective f unctio n of sliding work minimum and t ransformed shock intensities into o ne of t he co nst raint s of optimal co nt rol . It avoided t he difficulties of t he weight factor adjust ment in multi2o bjective optimizatio n. The simulatio n and test result s show t hat using optimal displacement co nt rol can ensure t he sliding work minimum in t he co nditio n of meeting driver co mfort which simplifies t he co nt rol system and st rengt hens t he co nt rol system co mmo nness and t ransplantatio n. Key words : auto motive engineering ; auto matic t ransmissio n ; simulatio n ; optimal co nt rol ; dry clutch ; starting co nt rol ; displacement co nt rol
应该适度缩短 ,避免摩擦盘过热 。滑摩到同步阶段 的控制 ,直接关系到乘坐舒适性和离合器使用寿命 , 本文的主要内容就集中于此 ,探讨滑摩到同步的最 优位移控制问题 。
AMT 汽车离合器动力学模型简图如图 1 所 示 。图 1 中 J e 为发动机到离合器主动侧的转动惯 量 ,ωe 为发动机转速 , Te 为发动机净输出转矩 , J c 为离合器从动侧 、变速器 、传动轴 、主减速器 、车轮 、 车体的转动惯量集成到离合器从动侧的等效转动惯 量 ,ωc 为离合器从动侧角速度 , TR 为等效到离合器 从动侧的汽车阻力矩 。
度 , V =ωc Rw / ( i0 in ) ; M 为汽车总质量 ( 包括汽车空 载质量 M0 和载荷质量 M′) ; g 为重力加速度 ;θ为
r′2 ) ]
(5)
式中 : E 为弹性模量 , 取 E = 2. 1 ×105 M Pa ; u 为泊
松比 ,取 u = 0. 3 ; H
中 国 公 路 学 报 2010 年
形; R 为碟簧外径; r 为碟簧内径; L 为压盘接触外