第二章船舶航向稳定性与回转性-2-3精品PPT课件
合集下载
02航向稳定性和回转性讲解

But rudder dimensions are limited by stern geometry艉部几何限制 Also, large rudders will increase drag and so reduce the ship‘s speed for a given delivered horse power from the propeller阻力增大,导致速降
the magnitude of the rudder‘s dimensions 舵的几何大小
the rudder angle 舵角 the ship‘s speed 船速
船海系:邱磊
操纵性权衡(Manoeuvrability trade-off)
《船舶操纵性与耐波性》课件
The need for good directional stability and minimum response oppose each other方向稳定性与应舵性矛盾
初始转首性能(Initial turning/course-changing ability) 偏转抑制性能(Yaw checking ability) 回转性能(Turning ability)--—大舵角下 停船性能(Stopping ability)
船海系:邱磊
5
6
固有动稳性(直线运动稳定性)
船海系:邱磊
《船舶操纵性与耐波性》课件
directionally unstable ship 不具方向稳定 性
directionally stable ship具 有方向稳定性
船海系:邱磊
运动响应(Response,应舵性、追随性)
《船舶操纵性与耐波性》课件
Is the requirement to turn in a satisfactory manner when a rudder order is given操舵指令发出后船舶是否按要求转向了? The ship must respond to its rudder and change heading in a specified minimum time 在给定的最短时间内船舶必须应舵转首 There should be minimum overshoot of heading after a rudder order is given超越角应最小 Both these response quantities are dependent upon应舵性的 大小取决于:
操纵(第02课)
t=0.004
D
. V0 R0
S=0.101
D
. V02 R0
式中: D为船舶排水量(t); VRt为00为为时V船间0舶时(m的的in定船);常舶速阻度力((kt)n;); S为启动惯性距离(m)。 根据经验,从静止状态逐级动车,直至达到定常速
度,满载船舶约需航经20倍船长左右的距离,轻载时约为 满载时的1/2~2/3。
2.影响船舶保向性的主要因素
1)船型 2)载态 3)舵角 4)船速
水下船型是决定船舶转头阻矩和惯性的重要因素, 水上船型是决定船舶所受风力及风力转船力矩大 小的重要因素。它们对保向性均有很大影响。表 现在:
(1)方形系数较低、长宽比较高的瘦削型船舶, 其保向性较优;浅吃水的宽体船保向性较差。
(2)尾倾较首倾时的保向性好。
增大所操的舵角,能明显地改善 船舶的保向性。超大型油轮小舵 角状态下有航向不稳定趋势,需 用较大舵角才能保向。
对于同一艘船而言,由于船速的 提高船舶保向性将变好。
其它因素:
保向性将因水深变浅而提高,船 舶顺风浪或顺流航行中保向性反 而降低。
第三节 船舶变速运动性能
= r.dt = r 0.e-t/T.dt = r0 . T
0
0
由上式可知,当干扰过去之后,船舶因干扰而 造成的偏航角应由干扰的大小(这可由干扰造 成的初始转头角速度来确定)和航向稳定性指 数T值的大小来决定;而同样干扰情况下,航 向稳定性好的船舶,干扰造成的偏航角也应该 低。
二、船舶航向稳定性的判别
1.根据航向稳定性指数判别 2.根据船舶的线型系数判别
船舶航向稳定性指数T>0,说明船舶 具有航向稳定性,且T值为越小的正 数,船舶的航向稳定性越好。航向稳 定性指数T<0,则说明船舶不具有航 向稳定性。船舶追随性好的船舶可以 同时判断为航向稳定性好的船舶。
《船舶操纵与避碰—船舶操纵》教学课件—01船舶操纵性能

第二阶段 (过渡阶段)
• 过渡阶段:转舵结束起到船舶进入定 常回转运动为止的动态过程
• 受力情况:随船舶横移、漂角增大, 作用于船体的流体力和力矩增大;
• 运动特点 : 斜航运动; 旋回加速; 纵向速度下降; 内倾渐渐向外倾变化。
第三阶段(定常阶段)
• 定常阶段(steady turning) : 受力与运动处于稳定状态
6.舵角
规律:
– 在极限舵角的范围之内,操不同舵角时的旋回初径变 化情况,总的趋势是,随着舵角的减小,旋回初径将 会急剧增加,当然旋回时间也将增加。
– 对于不同的船舶,随着舵角的减小,旋回初径的增加 率是不一样的,其中舵的高宽比小的船舶,其旋回初 径的增加率较大。
7.操舵时间
操舵时间主要对船舶的进距影响较大,进距随操 舵时间的增加而增加;
• 降速幅度:
– 与旋回初径DT有密切的关系,DT/L值越小,旋回性越好, 降速越显著。
– 一般船舶旋回中的降速幅度大约为旋回操舵前船舶速度的 25%~50%,而旋回性能很好的超大型油轮最大可达到原 航速的65%。
3. 横倾(list)
横倾变化
– 船舶操舵不久,将因舵力横倾力矩而出现少量内倾; – 接着由于船舶旋回惯性离心力矩的作用,内倾将变为外倾; – 因横向摇摆惯性的存在将产生最大的外倾角θmax,最大外
第一章 船舶操纵性能
• 第一节 船舶旋回性能 • 第二节 船舶航向稳定性和保向性 • 第三节 船舶变速运动性能 • 第四节 船舶操纵性能试验 • 第五节 IMO船舶操纵性衡准的基本内容
第一节 船舶旋回性能
• 在实际操船中,对舵的使用大致可分为小舵角的 保向操纵、一般舵角的转向操纵及大舵角的旋回 操纵三种。定速直航的船舶操某一大舵角后进入 定常旋回的运动性能称为船舶的旋回性能,它是 船舶操纵性当中极为重要的一种性能。
船舶操纵2
• 船舶的追随性指数
– – – – T (turning lag index),单位为秒; T=I/N=船舶转动惯量/单位角速度旋回阻尼; T表示追随性优劣,T小,追随性好,应舵较快; T如果为负值,船舶航向不稳定。
三、操纵性指数
• 区分船舶操纵性
– 不同种类、结构 和大小的船舶, 其操纵性会有很 大的不同。按照 K、T指数比较船 舶的旋回轨迹, 可将船舶操纵性 概略地区分为四 类
4.外界因素
• 保向性将因水深变浅而提高; • 船舶顺风浪或顺流航行中保向性反而降低。
本节要点
• 影响旋回性的因素。
– 船型因素:方形系数、长宽比、水下侧面积、舵面积、车舵类型 – 操船因素:舵角、船速、吃水、纵倾、横倾以及外界因素
• 船舶航向稳定性
– 船舶运动稳定性的分类 – 船舶航向稳定性的含义
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
2
)
三、操纵性指数
• 转头惯性角的估算
– 船舶在航行中改向操舵后,船舶的转头角速度 r0到达某一定值后操正舵,船首继续转头惯性 角为: =r0T
四、舵效
• 舵效的概念
– 操舵后,会引起船首回转、横向移动、船速下降、船 体横倾等现象,广义上,舵效即为船体对舵的响应。 – 狭义上,舵效,操一舵角后船舶在一定时间、一定水 域内船首转过的角度大小。
船舶操纵的基本原理PPT资料(正式版)
6)比方型系数பைடு நூலகம்大的肥大型船(Cb≈0.
5)旋回圈直径D (3)逆风回转时的旋回圈直径小于顺风回转时的旋回圈直径;
T值越小,操舵时船舶对舵角响应所需的时间越少,追随性能越好;
进距又称纵距,通常所说的进距是指航向转过90°时的进距。
旋回圈直径是指船舶进入定常旋回运动时的旋回圈 直径(D=2r)。
船舶旋回圈各要素是船舶操纵的重要依据,特别是 航向改变量为30°~40°时的纵距、横距、反移量
实际操船中,可以通过控制增减船速来调整旋回圈的大小。
进距又称纵距,通常所说的进距是指航向转过90°时的进距。
1)进距LA 对同一艘船而言,吃水大、满载时的纵距较大。
6)比方型系数较大的肥大型船(Cb≈0.
操舵时间越短,即转舵速度越快,进距越小,舵效越好。
进距是指船舶开始操舵到航向转过某一角度时,船 一般15°舵角旋回时与操满舵相比,旋回初径可能将增加到130﹪~170﹪,而掉头时间则可能增加到140﹪左右。
2)操舵时间
据1974年SOLAS公约规定,船舶主操舵装置应具备在船 舶最大航海吃水和以最大营运船速航行时,将舵从一舷的 350转至另一舷的350,或且从任何一舷的350转至另一舷 的300的时间应不超过28s;一般情况下,由正舵至一舷 350为止的时间约15s左右。内河船舶装备机动舵机,当 L﹥30m时其主操舵装
旋回圈初径是指开始操舵到航向转过180°时重心 追随性的优劣可用追随性指数T值来衡量。
操舵时间越短,即转舵速度越快,进距越小,舵效越好。
所移动的横向距离。在内河,对船舶选择旋回掉头 同理,左旋单桨船航进中旋回的情况正好相反。
它可用为了保持船舶按指定的航向航行所需的操舵次数和所用舵角的大小来衡量。
5)旋回圈直径D (3)逆风回转时的旋回圈直径小于顺风回转时的旋回圈直径;
T值越小,操舵时船舶对舵角响应所需的时间越少,追随性能越好;
进距又称纵距,通常所说的进距是指航向转过90°时的进距。
旋回圈直径是指船舶进入定常旋回运动时的旋回圈 直径(D=2r)。
船舶旋回圈各要素是船舶操纵的重要依据,特别是 航向改变量为30°~40°时的纵距、横距、反移量
实际操船中,可以通过控制增减船速来调整旋回圈的大小。
进距又称纵距,通常所说的进距是指航向转过90°时的进距。
1)进距LA 对同一艘船而言,吃水大、满载时的纵距较大。
6)比方型系数较大的肥大型船(Cb≈0.
操舵时间越短,即转舵速度越快,进距越小,舵效越好。
进距是指船舶开始操舵到航向转过某一角度时,船 一般15°舵角旋回时与操满舵相比,旋回初径可能将增加到130﹪~170﹪,而掉头时间则可能增加到140﹪左右。
2)操舵时间
据1974年SOLAS公约规定,船舶主操舵装置应具备在船 舶最大航海吃水和以最大营运船速航行时,将舵从一舷的 350转至另一舷的350,或且从任何一舷的350转至另一舷 的300的时间应不超过28s;一般情况下,由正舵至一舷 350为止的时间约15s左右。内河船舶装备机动舵机,当 L﹥30m时其主操舵装
旋回圈初径是指开始操舵到航向转过180°时重心 追随性的优劣可用追随性指数T值来衡量。
操舵时间越短,即转舵速度越快,进距越小,舵效越好。
所移动的横向距离。在内河,对船舶选择旋回掉头 同理,左旋单桨船航进中旋回的情况正好相反。
它可用为了保持船舶按指定的航向航行所需的操舵次数和所用舵角的大小来衡量。
船舶原理PPT讲义- 稳定性问题
L
' dF dF dF dF
L p ( x2 x1 ) xF 2 GM L
x1 A x2 A1 G G1 W1 B F p
dA
W
xF
L1 L
B1
dF
Chapter three: Initial stability
§3-5 The effect of weight movement on stability
M R GZ GM sin
Where GZ is the restoring arm, GM is the initial stability height。
+ MR
M
w
When the heeling angle is small,
sinф ≈ ф, therefore, the above formula can be written as:
Chapter three: initial stability
§3-2 Metacenter
水线面WL
W
o
y1
o
y1/2
W1
v 2 y2 o
y1
y2
L1
v1
dx
L
L
在等体积倾斜的情况下,出水楔形的体积和入水楔形的 体积必然相等,由此可得:
L/2 1 1 2 2 y dx y L / 2 2 1 L / 2 2 2 dx L/2
A1
p
L1
L
k
pl tg k / GM
船舶试验的原理
pl ZG ( Z B BM ) tg
Chapter Three: Initial stability
' dF dF dF dF
L p ( x2 x1 ) xF 2 GM L
x1 A x2 A1 G G1 W1 B F p
dA
W
xF
L1 L
B1
dF
Chapter three: Initial stability
§3-5 The effect of weight movement on stability
M R GZ GM sin
Where GZ is the restoring arm, GM is the initial stability height。
+ MR
M
w
When the heeling angle is small,
sinф ≈ ф, therefore, the above formula can be written as:
Chapter three: initial stability
§3-2 Metacenter
水线面WL
W
o
y1
o
y1/2
W1
v 2 y2 o
y1
y2
L1
v1
dx
L
L
在等体积倾斜的情况下,出水楔形的体积和入水楔形的 体积必然相等,由此可得:
L/2 1 1 2 2 y dx y L / 2 2 1 L / 2 2 2 dx L/2
A1
p
L1
L
k
pl tg k / GM
船舶试验的原理
pl ZG ( Z B BM ) tg
Chapter Three: Initial stability
船舶操纵性_第2章

由上述结论可以得知,
S i bi1 e bi 2 e .......... . bin e
1t 2t
nt
bij e
j 1
n
jt
式中的任意分量 b e i t的函数性质仅与特征根 i 有关, i 初始条件决定的待定常数 ,只决定该分量的大小和正负, bi 不 能 决 定 函 数 的 性 质 ( 是 衰 减 或 发 散 )
C2
e 2t
t , r 0, C0
也就是说,船最多只具有直线自动稳定性,而不具有航 向自动稳定性,扰动消失后,船将沿着新的航向直线航 行。但是,习惯上也常将直线自动稳定性称为航向自动 稳定性。
第二章 船舶运动的航向稳定性
特征值 1 和
2 的实部的正负决定了船是否具有自
C Yv N r N v (m 11 )u 0 Yr
第二章 船舶运动的航向稳定性
船舶以舵角 0 作直线航行时,不可避免的 会受到各种干扰而偏离原来的航向。如果扰动消失 后,船能够不用转舵而自动回到原来的航向,则该 船具有自动航向稳定性;如果必须借助于转舵而回 到原来的航向,则该船具有航向控制稳定性; 物体的运动稳定性是相对于不同的运动参数而 言的。所以,要讨论船的运动稳定性,就必须指明 是针对哪一运动参数,如角速度 ,艏向角 或横向位置 y1G 等。
d i 0 (i 1,2, , n)
第二章 船舶运动的航向稳定性
例如对于二次方程:
a1 a2 0
2 1
的根都具有负实部的充分必要条件是:
d1 a1 0
即:
d2
a1 a3
a0 a2
a1 0
1 a2
S i bi1 e bi 2 e .......... . bin e
1t 2t
nt
bij e
j 1
n
jt
式中的任意分量 b e i t的函数性质仅与特征根 i 有关, i 初始条件决定的待定常数 ,只决定该分量的大小和正负, bi 不 能 决 定 函 数 的 性 质 ( 是 衰 减 或 发 散 )
C2
e 2t
t , r 0, C0
也就是说,船最多只具有直线自动稳定性,而不具有航 向自动稳定性,扰动消失后,船将沿着新的航向直线航 行。但是,习惯上也常将直线自动稳定性称为航向自动 稳定性。
第二章 船舶运动的航向稳定性
特征值 1 和
2 的实部的正负决定了船是否具有自
C Yv N r N v (m 11 )u 0 Yr
第二章 船舶运动的航向稳定性
船舶以舵角 0 作直线航行时,不可避免的 会受到各种干扰而偏离原来的航向。如果扰动消失 后,船能够不用转舵而自动回到原来的航向,则该 船具有自动航向稳定性;如果必须借助于转舵而回 到原来的航向,则该船具有航向控制稳定性; 物体的运动稳定性是相对于不同的运动参数而 言的。所以,要讨论船的运动稳定性,就必须指明 是针对哪一运动参数,如角速度 ,艏向角 或横向位置 y1G 等。
d i 0 (i 1,2, , n)
第二章 船舶运动的航向稳定性
例如对于二次方程:
a1 a2 0
2 1
的根都具有负实部的充分必要条件是:
d1 a1 0
即:
d2
a1 a3
a0 a2
a1 0
1 a2
2 船舶操纵性基础(6学时)

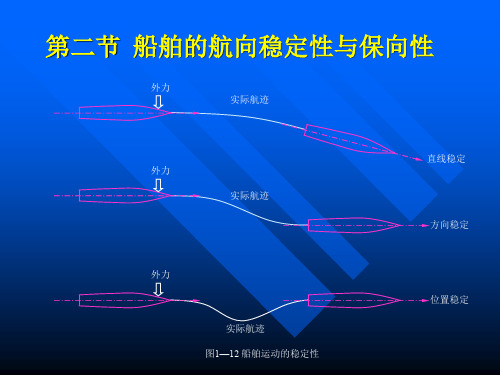
要达到方向稳定,需要操舵; 要达到位置稳定,需要操舵和定位。
2、航向稳定性的概念
船舶不具有直线运动稳定性的后果:
在小舵情况下,可能出现反操现象; 保向比较困难; 在海上航行时,可能自动舵打不上; 操舵者较难以掌握操舵技术; 操舵者劳动强度增加,并且要求注意力要高度
集中;
可能出现失误。
二、航向稳定性的判别
1、直接判别参数-实船试验结果
螺旋试验结果: 把定常旋回角速度作为舵角的函数,可以得 到:源自r rcaδ
d 具有航向稳定性的船舶
b
δ
航向不稳定的船舶
1、直接判别参数-实船试验结果
逆螺旋试验结果
r
航向稳定:
与螺旋试验结果相似;
δ— r 曲线出现多值对 应的S形曲线。
本船的主尺度
操纵装置性能 船在不同载况时主机不同转速下的航速 船舶特殊操纵装置(侧推器),等等。
二、船舶必备操纵性资料
2、驾驶台操纵性图(Wheelhouse Poster)
驾驶台操纵性图是一种详细描述船舶旋回性能
和停船性能的图表资料。
张贴于:驾驶台显著位置。
内容包括:
4、新航向距离DNC: 57.3 C V t1 DNC L(T tan ) K 0 2 2
所以:
57.3 60 181852 3 150 (1.55 tan ) 643.4 m 1.2510 2 3600 2
DNC
§2-2 航向稳定性与保向性
2.操10º 舵角改向60º 时的新航向距离DNC。
例题
2、航向稳定性的概念
船舶不具有直线运动稳定性的后果:
在小舵情况下,可能出现反操现象; 保向比较困难; 在海上航行时,可能自动舵打不上; 操舵者较难以掌握操舵技术; 操舵者劳动强度增加,并且要求注意力要高度
集中;
可能出现失误。
二、航向稳定性的判别
1、直接判别参数-实船试验结果
螺旋试验结果: 把定常旋回角速度作为舵角的函数,可以得 到:源自r rcaδ
d 具有航向稳定性的船舶
b
δ
航向不稳定的船舶
1、直接判别参数-实船试验结果
逆螺旋试验结果
r
航向稳定:
与螺旋试验结果相似;
δ— r 曲线出现多值对 应的S形曲线。
本船的主尺度
操纵装置性能 船在不同载况时主机不同转速下的航速 船舶特殊操纵装置(侧推器),等等。
二、船舶必备操纵性资料
2、驾驶台操纵性图(Wheelhouse Poster)
驾驶台操纵性图是一种详细描述船舶旋回性能
和停船性能的图表资料。
张贴于:驾驶台显著位置。
内容包括:
4、新航向距离DNC: 57.3 C V t1 DNC L(T tan ) K 0 2 2
所以:
57.3 60 181852 3 150 (1.55 tan ) 643.4 m 1.2510 2 3600 2
DNC
§2-2 航向稳定性与保向性
2.操10º 舵角改向60º 时的新航向距离DNC。
例题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
航向稳定性
二. 小挠动方程
➢ 研究船舶在水平面内的航向稳定性主要取决于以下二式:
消去v化简后可得:
方程前系数
航向稳定性
特征方程为: 由特征方程可求得特征根:
角速度扰动方程 的解为: 消去r化简后,得v 的小扰动方程为: 横向速度的解为:
r r1e1t r2e 2t v v1e1t v2e 2t
第二节 船舶回转性
一、基本概念: 回转性 转舵使船舶作圆弧运动的能力。
用回转直径来表示。 与船舶避让、避碰、靠离码头、 灵活掉头有关 定常回转圈 操纵性的指标。
衡量转首性和回转性的直观方法。 回转圈 船舶在不同舵角条件下作圆周回转时
船舶操纵性与耐波性
二. 小挠动方程
➢ 由以上解式可知,特征根若具有负实部,则扰动后 的扰运动量v,r都回复到原来的状态称之为具有 稳定性. 但,即使v,r都回复到初始状态参数,却与 初始首向仍存在着一个角度偏差:
➢ 可见,对水面船舶不操舵,就不可能实现 “方向稳定性”,最多只能是”直线运动稳定性”,
习惯上称之为”航向稳定性”
船舶操纵性与耐波性
三. 航向稳定性分析
船舶操纵性与耐波性
三. 航向稳定性分析
船舶操纵性与耐波性
1) A
A>0
稳定性衡准数C
大的正值 大的正值 小的正值或负值 小的正或负
分析知值,对水面船舶,A必为正,故航向稳定性要求B/A>0,C/A>0
即为要求 B>0, C>0
2) B
船舶操纵性与耐波性
第二章 船舶操纵
§2-2 航向稳定性
船舶操纵性与耐波性
内容概要
航向稳定性
影响因素 航向稳定性分析 研究方法
基 本 概 念
船舶操纵性与耐波性
航向稳定性
Directional Stability
一. 基本概念
1. 稳定性概念:
对处于定常运动状态的物体(或系统),若受到极小的 外界干扰作用,而偏离原定常运动状态,当干扰去除之后, 经过一定的过渡,若物体(或系统)能回复到原定常运动状 态,则称原运动状态是稳定的.
者取决于船体几何形状,后者取决于整个闭合回路的特性。 固定稳定性越好的船,控制稳定性也越好。 对于通常的水面船舶,只有通过操舵控制才可能使之具备
方向稳定性和位置稳定性。 如果不操舵,最多具备直线稳定性.
二. 研究方法--小挠动方程
➢ 运用”运动稳定性理论”分析方法对稳定性问 题进行定量分析.
物体的运动状态是否稳定既取决于物体本身的性质, 而且也取决于所考察的运动状态和运动参数.
船舶操纵性与耐波性 2. 水面船舶的运动稳定性: 1) 直线运动稳定性
(straight line stability, also called Inherent dynamic stability) 船舶受瞬时扰动后,其重心轨迹终将恢复为一直线,但航向发生了变化。
➢ 设船舶初始运动状态: u1=const,v1=r1=0
➢ 扰动后引起的扰动运动参数: (2-1)
由于对初始状态是小扰动,偏离量较小,可用线性操 纵运动方程来描叙。
不操舵则 δ=0 , 得小扰动方程:
航向稳定性
二. 小挠动方程
对(2-2)可改写为: 其对应的特征方程为: 则,特征根为:
最终解为:
B >0
大的负值 大的正值 小的负值 小的不定符号 大的正值 大的负值
不定符号小量 不定符号小量
分析知,航向稳定性条件减少到只需满足一个条件: C>0 .
船舶操纵性与耐波性
稳定性衡准数 C
定义系数C 为稳定性衡准数;上式即为稳定性衡准式。 稳定性判别
C >0 是船舶航向稳定性的 判据 C>0 表明船舶在水平面运动具有直线稳定性; C<0 表明不具有直线稳定性 。
t , r 0; 0; yG 0。
船舶操纵性与耐波性
3). 位置稳定性---- 船舶受扰后,其重心运动轨迹 将恢复为原航线的延长线
t , r 0; 0; yG 0。
船舶操纵性与耐波性
3. 关系与分类
结 论:
具有位置稳定性的船舶一定具有直线稳定性和方向稳定性。 具有方向稳定性的船舶一定具有直线稳定性。 按是否操舵,稳定性可分为固定稳定性和控制稳定性.前
t , r 0; 0;对角速度运动参数,运动是稳定的。
航线
船舶操纵性与耐波性
2)方向稳定性(directional stability, course-keeping ability)
船舶受扰并在扰动消除后,其重心轨迹最终将恢复为与原来航线相平行 的另一直线。
lr 具有阻止船舶回转的作用,称为抗干扰力臂
航向稳定性改善措施
水动力导数是与船体几何形状密切相关的。
▪ 增加船长可使N r负值增加
▪▪ 增加船舶中纵剖面的侧面积可使 Nr,Yv 的负值增加 增加Nv的有效方法是: ➢ 增加纵中剖面的尾部侧面积 ➢ 可采用增大呆木,安装尾鳍 ➢ 使船产生尾倾 ➢ 削去前踵等
(2-2)
航向稳定性
二. 小挠动方程
➢ 说明: 上式即为纵向速度小扰动方程的解: t→∞,要使
扰动速度△u→0,应使
负值。
➢ m - X u 为船舶本身质量与纵向附连水质量之和,对一般 排水量船舶为正值。
➢ 分子Xu为纵向速度u的增加所引起的纵向分力X的变化率。
➢ 如下图:在平衡速度u1时,螺旋桨正好克服 u1 时的船体阻 力,故,合力为零。此时产生一个正的扰动速度时,将引起 纯阻力的增加,即X的减少。从此图可知在u1处的Xu是一 个明显的负值。这样,对特征根而言,分母正而分母负。 使之值始终为负,说明其对纵向速度扰动总具有稳定性。
船舶操纵性与耐波性
航向稳定性改善措施
增加纵中剖面的尾部侧面积
增加船舶中纵剖面的侧面积
使船产生尾倾
削去前踵
船舶操纵性与耐波性
第二章 船舶操纵
§2-3 船舶回转性
影响因素 航向稳定性分析
研究方法
内容概要
航向稳定性
基 本 概 念
回转性
基
回
回
本 概
转 过
转
运
速降
念
程
动
分耦
析
合 特
回转
性
横倾
船舶操纵性与耐波性
稳定性衡准数 定义
定义
lv
Nv Yv
lv Yv
xG
O
V
lr
r Yr mu1
C
Yv (mu1
Yr
)
[
Nr Yr
mxGu1 mu1
Nv Yv
] Yv (Yr
mu1 ) (lr
lv )
抗干扰力臂 偏航力臂
lv 侧向力作用点距坐标原点的距离,由v引起的力矩常使船偏离航向,
是一种不稳定因素,称为偏航力臂