机载防撞系统介绍
飞机防撞系统TCAS

飞机防撞系统可显示飞机周围的情况,有效地辅助飞机驾 驶员主动搜寻和目视发现可能的空中交通冲突,并在需要时 提供语音告警,同时帮助驾驶员以适当机动方式躲避危险, 这些都有助于避免灾难性事故的发生。
飞机防撞系统TCAS简介
TCAS有三类: TCAS Ⅰ:能侦测上7000英尺下10000英尺,前15至40海里,发 现有其它飞机接近时,提前40余秒警告飞行员对方飞机位置和 高度,称为交通咨询(TA, Traffic Advisory),语音警告: “Traffic!Traffic! Traffic!” TCAS Ⅱ:第二代空中防撞系统,目前最广泛使用,会用声音 及显示警告飞行员,称为决断咨询Resolution Advisory (RA),并会语音提示避撞动作,如“Climb! Climb Climb!”“Descend! Descend! Descend!”,另外一架飞 机会有相反警告。 TCAS Ⅲ:第三代空中防撞系统,除了有上下避撞措施还有左 右避撞措施。
飞机防撞系统TCAS简介
1956年6月30日在科罗拉多大峡谷上空6500米处,两架民航班 机相撞造成128人死亡,民航当局随后启动了对有效防撞系统 的研发工作。 1978年,一架轻型飞机在圣地亚哥上空与一架民航班机相撞, 导致了美国联邦航空局(FAA)启动对空中交通警戒和防撞系统 (TCAS)的研究。 最终导致美国国会立法要求实施TCAS的事件是1986年8月31日 在加利福尼亚洲靠近 洛杉矶国际机场的塞 里图斯空域内,一架 墨西哥航空 (Aeromexico)的DC-9 和一架私人飞机空中 相撞。
飞机防撞系统TCAS侦测范围
飞机防撞系统TCAS侦测范围
飞机防撞系统TCAS侦测范围
TCAS无威胁交通目标显示
TCAS接近交通目标显示
脱离RVSM运行区域

TCAS中文名叫机载防撞系统,就是飞行中发生冲突时的报警系统,用以指示飞行员此时飞机应做出的避让机动,RVSM是缩小垂直间隔,以前在中国8900米(含)以上的最小垂直间隔是600米,但航空业比较先进的国家都用300米也就是缩小垂直间隔(RVSM),去年我国开始运行RVSM,也就是和国际接轨,在8900米(含)以上的高空中可以用300米的垂直间隔,航行内的RVSM空域就是指的就是这个空域,在这个空域内飞行对飞机的设备精度有规定要求,TCAS故障后不具备此精度要求,所以必须马上脱离该区域,下降到非RVSM空域,否则最小间隔不能保证,会造成危险冲突。
8900米下面一个高度层是8400米,8400米(含)以下(垂直间隔一直就是300米,以前也是)的空域是非RVSM空域,对设备的精度要求没有RVSM 空域高,飞机TCAS故障后下降到这个区域还是可以满足要求的,仍可以正常飞行。
当然如果飞行员要求备降检查也是可以的。
6000米以上按规定是不能用目视飞行的。
允许进入RVSM空域的飞机对设备有要求,没有相关设备的飞机是不能进入这个空域的。
8400米以下没有RVSM空域要求的那么多设备了,在不危胁飞行安全的前提下可以继续飞行,在管制工作中TCAS失效在非RVSM空域还可以继续飞。
8900米以上的高空飞行速度大,空气本身就稀薄,机动性不如低空好,设备要求比低空高。
在以前中国用600米垂直间隔的时候有足够的安全余度,改用300米以后就没有了,已经是用最小垂直间隔了,有差错就会造成危险接近,不符合国际上的要求。
现在飞机的设备在这个空域(8400米以下)都可以满足精度要求。
你们公司怎么要求我们不清楚,我们(空管)工作的时候主要是看飞机设备是否符合进入RVSM空域的要求,不符合必须下降至8400(含)以下的高度。
塔吊防碰撞原理
塔吊防碰撞原理
塔吊防碰撞系统是一种安全保护装置,旨在防止塔吊与周围障碍物(建筑物、其他塔吊等)发生碰撞。
防碰撞系统采用先进的技术和传感器,通过监测塔吊及其周围环境的状态来实现碰撞预防。
以下是塔吊防碰撞的一般原理:激光雷达或微波雷达技术:
塔吊防碰撞系统通常使用激光雷达或微波雷达等传感技术,这些传感器可以感知塔吊周围的物体、建筑结构和其他障碍物。
实时监测:
传感器实时监测塔吊本身和其工作范围内的任何移动物体。
这包括其他塔吊、建筑物、起重物等。
距离和速度计算:
防碰撞系统通过测量物体的距离和速度,计算出塔吊与其他物体之间的相对位置和动态关系。
碰撞预测和预警:
基于实时监测数据,防碰撞系统可以进行碰撞预测。
如果系统检测到与其他物体的距离过近或存在碰撞风险,它会发出预警信号。
紧急制动和停机功能:
防碰撞系统可以配备紧急制动和停机功能。
当系统判断存在碰撞风险时,可以自动触发紧急制动,或者发出停机信号,以防止碰撞的发生。
可视化显示:
防碰撞系统通常具备可视化显示界面,向塔吊操作员展示周围环境的图像或警告信息,帮助操作员更好地理解和应对潜在的碰撞风险。
可调参数:
防碰撞系统通常具备可调参数,以适应不同工程场地和工作条件。
操作员可以根据实际情况对系统进行调整。
塔吊防碰撞系统的原理在于通过先进的感知和计算技术,及时发现潜在的碰撞风险,并通过紧急制动或预警功能来保障塔吊的安全运行。
这有助于减少意外事故,提高工地作业的安全性。
浅谈机载防撞系统(TCAS)

A OD N E S S E ”的缩 写 。中文通 常译 为 交通 警戒及 防 V IA C Y T M 撞 系统 ” T A 系统是 一个独 立 的空 中使 用 的提醒 系统 . 用 。 C S 使 A CB T R S方式或 者 MO E D S方式 询问入侵 飞机 的 A C应 答机 .探 T 测 是否存在 入侵飞机 ,并 监视和 连续计算 是否存 在相撞 的危 险 提供 T 、R A A显 示 ,警 告信号 。T A C S系统对信 号 的灵 敏度和 精 度 有很高 的要求 , 大量 的数据计 算是其提 供高精 度 电子 识别 的基 础 , 加上机 上复杂 恶劣 的电磁环境 .造成 了各 型飞机 上 T A 再 CS 系统故障率相 对较 高的情 况。 为一名机 务人 员 , 作 在故 障发生 后 , 应 如何 采取 排故方 案 ,使故 障在最 短 时间内得 到处理 呢7现 在 让 我们 以 7 7 3 飞机 为例 . T A 对 C S系统 的概况进 行 阐述 。
T A F I:T A 计算 机故 障或 计算 机工 作 的最低 输入 C S AL C S 信 号 无效 T PA T B T A T O N / O N :表示 顶部 或底 部天 线故 障 T I / A DS 表示 一部 或 二部 无线 电高度 表故 障 。 A DS R I P P 但 是我 们 经 常遇 到 的 是飞 机 在 空 中 短 时 间 出 现 的 T A CS F L 而 -N 地 面则 完全 正 常 ,这就 需要 我们 熟 练 的掌握 系统 AI 的组成 和 工作 原理 .以减 少排故 的时 间。通 过维 护手 册 .我们 可 以知道 到 ,造成 出现 “T A AI C SF L ”信 息 的主要原 因有 : ( )从应 答机 、无线 电高 度表 和 E I 示系 统输 入的信 1 F S显 号故 障 。 ()T A 天 线或 天线 馈线 持续 故 障 。 2 CS ()从 S模 式应 答机 到 T A 3 C S计 算机 的 A IC4 9 R 2 数据 N 总线 中数 据失 效或 数据 丢失 。 ()T A 计 算机 内部 故 障或 内部 电源故 障 。 4 CS ()从磁 航 向或 无线 电高 度表 来的 错误 数据 。 5 ()围绕 T A 6 C S和应答 机 的射 频环 路测试 故 障 。 根据 这些 故 障原 因再 结合 工作 中遇 到 的实 际情 况 我们 总 结 了一些 常见 的故 障源 来分 析 它们 的特 点。
机载防撞系统垂直防撞的物理模型

第5 0卷 第 8 期
21 00年 8月
电讯技术
T lc mmu ia o n e f g ee o n c t n E on e n i i
Vo . 0 N . 15 o 8
Aug.2 0 01
文章 编号 :0 1 9X(0 0 0 10 —8 3 2 1 }8—00 0 7—0 5
Ph sc lM o e o r i a l so o d n e y ia d lf r Ve tc lCo l i n Av i a c i
i r f cAlr n ol inAv ia c ytm( CA ) nT a eta d C ls od n eS se T S i io
Ab t a t T e v ria e a ain a h ls s on fa p o c r dce ewe n a h s ic ata n i t — sr c : h etc ls p r t tte co e tp i to p r a h p e itd b t e o tarr f nd a n md o
t n r s l h wsta h s d l a p e itt e v ria e aa in a e coe tp i to p r a h i e c s i e uts o h tte e mo esc n rd c h e c ls p t tt ls s on fa p c n t a e o t r o h o h o o arr t n o n e .F n l ft ica s e c u tr ial he slc in c n i o s o e ou in a vs r n e l gc p o e sn m— w f y,t ee t o dt n frs l t d io a d t o i rc si g p o i o y h
ATC_TCAS概述

ATC_TCAS概述
ATC(航空交通管制)和TCAS(空中交通碰撞防止系统)是航空领域
中两个重要的安全措施,旨在确保航空器的安全和防止空中碰撞。
空中交通碰撞防止系统(TCAS)是一种主动的防碰撞系统,旨在增强
航空器的安全性。
这个系统通过使用航空器之间的交流,发出警告并提供
避免碰撞的建议。
TCAS通过接收附近航空器的无线电信号和侦测系统,
计算并分析航空器之间的位置和速度,从而确定潜在的碰撞风险。
如果系
统检测到即将发生碰撞的情况,它会发出警告给飞行员,并提供具体的建议,如改变飞行高度或方向。
ATC和TCAS是独立但相互补充的安全措施。
ATC通过监控航空器的飞
行状况、提供导航指令、协调航空器之间的间隔等措施,确保航空器的安全。
而TCAS则在航空器无法与ATC建立有效通信或ATC系统故障时,通
过识别潜在的碰撞风险并提供建议来确保航空器的安全。
这两个系统在不同的层面上工作。
ATC负责监控大范围的空域和多个
航空器之间的交通情况,通过指示航空器选择不同的高度和/或航线来避
免碰撞。
TCAS则在更局部的范围内运行,并专注于检测潜在的碰撞风险,并发出警告和建议给直接相关的航空器。
总之,ATC和TCAS是航空领域中两个重要的安全措施。
ATC通过监控
航空器运动和提供导航指令,确保航空器的安全。
而TCAS作为一种主动
的防碰撞系统,通过警告和建议,帮助航空器避免碰撞风险。
机车防撞装置工作原理、设备组成及地面点安装

(图 5) 2、防撞侵入正线土档安装(图 6)
由机务段提供距离
机车行进方向
地面点(磁钢)
地面点(磁钢)
防护信号机
施工说明
1、地面点安装在机车行进方向左侧钢轨的外方。
2、按机务段提供的该地面点距防护信号机的距 离安装。 3、地面点安装螺丝紧固,距钢轨的中心距为 250±3毫米,地面点顶端高于轨面10毫米。
防撞土档减速控制地面点
施工说明
1、地面点安装在机车行进方向左侧钢轨的外方。 2、按机务段提供的该地面点距土档的距离安装。 3、地面点安装螺丝紧固,距钢轨的中心距为 250±3毫米,地面点顶端高于轨面10毫米。 4、防撞 土档绝对停车地面点1、 2两 个地面点的距 离在2~4米范围内。
防撞土档的地面点安装位置示意图
车载接收线圈切割磁钢产生的磁力线形成一个电压脉冲信 号(脉冲信号的电压幅度与接收线圈切割磁力线的速度即车 速成正比;脉冲信号的宽度与接收线圈切割磁力线的速度即 车速成反比),脉冲信号经过信息转换装置(含接口电路、 电压比较电路、放大电路、控制电路、输出电路)的转换, 转成机车监控装置能接收的信号,LKJ 机车监控装置(经过 软、硬件改造过的)能识别该信息后才可进行防撞土档的控 制(图 1)。
10
60kg/M钢轨
50kg/M钢轨
活动卡头
活动卡头M24紧固螺母
12 24
117±1
地面点式装置安装技术要求图
(图 4)
五、 防撞土档的地面点安装技术要求
1、防撞土档安装(图 5)
由机务段提供距离
2~4米
由机务段提供距离
土档
机车行进方向
防撞土档绝对停车地面点1 地面点(磁钢)
防撞土档绝对停车地面点2
飞机交通咨询和防撞系统介绍与排故
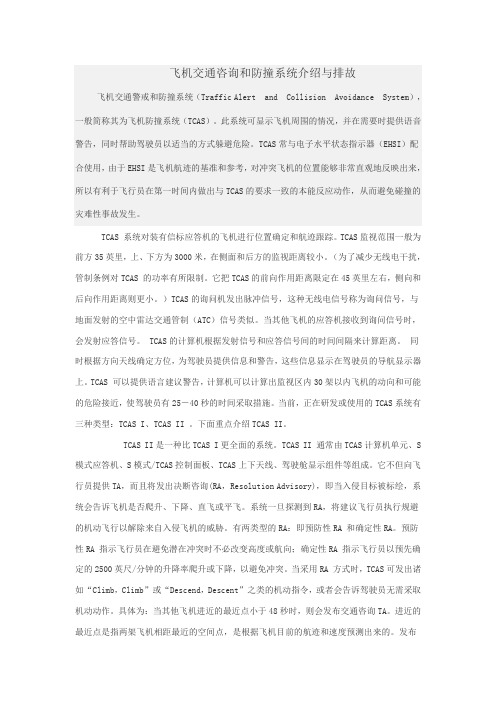
飞机交通咨询和防撞系统介绍与排故飞机交通警戒和防撞系统(Traffic Alert and Collision Avoidance System),一般简称其为飞机防撞系统(TCAS)。
此系统可显示飞机周围的情况,并在需要时提供语音警告,同时帮助驾驶员以适当的方式躲避危险。
TCAS常与电子水平状态指示器(EHSI)配合使用,由于EHSI是飞机航迹的基准和参考,对冲突飞机的位置能够非常直观地反映出来,所以有利于飞行员在第一时间内做出与TCAS的要求一致的本能反应动作,从而避免碰撞的灾难性事故发生。
TCAS 系统对装有信标应答机的飞机进行位置确定和航迹跟踪。
TCAS监视范围一般为前方35英里,上、下方为3000米,在侧面和后方的监视距离较小。
(为了减少无线电干扰,管制条例对TCAS 的功率有所限制。
它把TCAS的前向作用距离限定在45英里左右,侧向和后向作用距离则更小。
)TCAS的询问机发出脉冲信号,这种无线电信号称为询问信号,与地面发射的空中雷达交通管制(ATC)信号类似。
当其他飞机的应答机接收到询问信号时,会发射应答信号。
TCAS的计算机根据发射信号和应答信号间的时间间隔来计算距离。
同时根据方向天线确定方位,为驾驶员提供信息和警告,这些信息显示在驾驶员的导航显示器上。
TCAS 可以提供语言建议警告,计算机可以计算出监视区内30架以内飞机的动向和可能的危险接近,使驾驶员有25-40秒的时间采取措施。
当前,正在研发或使用的TCAS系统有三种类型:TCAS I、TCAS II 。
下面重点介绍TCAS II。
TCAS II是一种比TCAS I更全面的系统。
TCAS II 通常由TCAS计算机单元、S 模式应答机、S模式/TCAS控制面板、TCAS上下天线、驾驶舱显示组件等组成。
它不但向飞行员提供TA,而且将发出决断咨询(RA,Resolution Advisory),即当入侵目标被标绘,系统会告诉飞机是否爬升、下降、直飞或平飞。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机载防撞系统飞机上的防撞系统,美国航空体系称为空中交通预警和防撞系统(TCAS:Traffic Alert and Collision Avoidance System)欧洲航空体系称为机载防撞系统(ACAS:Airborne Collision Avoidance System)),两者实际上的含义、功能是一致的。
防撞系统可显示飞机周围的情况,并在需要时提供语音告警,同时帮助驾驶员以适当机动方式躲避危险,这些都有助于避免灾难性事故的发生。
下面以TCAS为例讲述。
TCAS 的历史可追溯到1955年,当时本迪克斯航空电子公司(目前并入霍尼韦尔公司)的J.S.Morrell博士发表了“碰撞物理”一文。
其中包括确定进近飞机间接近速率的计算机算法,这也是研究所有防撞系统的基础。
在20世纪60年代和七十年代,该公司为美国陆军和美国联邦航空管理局(FAA)研制了数架原理样机,并在80年代后期获得了FAA对TCAS的首次鉴定。
原理:在二次雷达用应答机确定飞机的编号、航向和高度的原理上,把询问装置装在飞机上,使飞机之间可以显示相互之间的距离间隔,从而使驾驶员知道在一定范围内飞行的航空器之间的相互间隔及时采取措施,避免碰撞。
和二次雷达一样,TCAS系统需要飞机上都装有应答机才有作用。
关于二次雷达可参考航空管制雷达的类型组成和功能:TCAS主要由询问器、应答机、收发机和计算机组成。
监视范围一般为前方30海里,上、下方为3000米,在侧面和后方的监视距离较小。
(为了减少无线电干扰,管理条例对TCAS的功率有所限制。
它把TCAS的前向作用距离限定在45英里左右,侧向和后向作用距离则更小。
)TCAS的询问器发出脉冲信号,这种无线电信号称为询问信号,与地面发射的空中雷达交通管制信号类似。
当其他飞机的应答器接收到询问信号时,会发射应答信号。
TCAS的计算机根据发射信号和应答信号间的时间间隔来计算距离。
同时根据方向天线确定方位,为驾驶员提供信息和警告,这些信息显示在驾驶员的导航信息显示器上。
TCAS可以提供语言建议警告,计算机可以计算出监视区内30架以内飞机的动向和可能的危险接近,使驾驶员有25-40秒的时间采取措施。
(TCAS可跟踪45架飞机,根据选定目标的优先级,最多显示30架飞机。
TCAS的采用提高了飞行的安全性,目前新生产的大、中型客机上TCAS都已成为标准装备。
TCAS的分类与区别:TCAS分为两类:TCAS I和TCAS II。
两类系统都可显示与地图类似的空中交通情况。
当其他飞机接近时,两类系统都可提供“空中交通报告(或咨询、建议)”(TA)。
采用TA 方式时,预先录制的声音会播报“Traffic,Traffic”,而表示其他飞机的符号则可改变形状和颜色。
TCAS II是更先进的TCAS,具有被称作“处理建议”(RA)的附加功能。
当采用RA方式时,TCAS可发出类似“Climb,Climb”或“Descend,Descent”之类的机动指令,或者会告诉驾驶员无需采取机动动作,具体为:当其他飞机进近的最近点小于48秒时,则会发布空中交通咨询TA(Traffic Advisory)。
进近的最近点是指两架飞机相距最近的空间点,是根据飞机目前的航迹和速度预测出来的。
空中交通咨询(建议)后,如果两架飞机继续沿着可能有危险的航迹飞行,则在离最近点大约35秒处,系统会提供处理建议RA(Resolution Advisory)。
代表其他飞机的符号会变为固定的红色方块,同时伴有诸如“Climb,Climb”之类的躲避机动语音提示。
系统还会在垂直速度指示器上用一绿条显示所需的机动速度。
这些机动动作幅度不大,一般不会引起乘客的注意。
这两架飞机上的TCASII也会进行协调以避免像两架飞机同时爬升之类的机动。
当然只有TCAS II和ACAS II系统具有这种功能。
在TCAS I系统中没有RA方式。
下面以右图为例,对TCAS II工作情况作简要说明(模拟图,非真实状况)图为空中交通咨询TA(建议)阶段事例:显示在本机正前方12点钟方位有飞机接近,以黄色实心圆表示该接近飞机,同时伴有“Traffic,Traffic”的警告音,黄色实心圆下面数字代表两机高度差,例图中“-02”表示接近飞机在本机下方200英尺,黄色实心圆右侧箭头表示该机正在爬升,且爬升速度超过500英尺/分钟。
左图为处理建议RA(决断)阶段事例:两机继续接近中,代表飞机的符号会变为固定的红色方块,同时伴有更为急促的“Climb,Climb”之类的提示机组作躲避机动语音提示。
民航飞机防撞系统现状:美国在1993年12月31日开始规定,30座以上的客机必须配备TCAS II。
负责向欧洲各国推荐航空管理条例的欧洲空中导航安全机构(也叫欧洲空管)已经建议采用与最新的TCAS II相同的系统。
在欧洲,该系统称为机载防撞系统(ACAS II)。
ACAS II是采用7.0版软件的TCAS II。
这是FAA批准的最新的软件版本。
欧洲空管建议,2000年1月1日后在30座以上的客机或最大起飞重量超过15000千克的飞机上配备ACAS II。
我国民航使用的客机比较先进,绝大部分已预先安装了最新版本的防撞系统。
从2002年中为进一步加强安全,也开始对其他未安装防撞系统的客机进行强制安装,这一工作预计于2002年底完成,2003年起,未安装防撞系统的民航客机将不得飞行,其他小型飞机由于飞机结构、技术原因等无法安装的将被严格限制飞行时段、飞行高度和范围,并逐步退出商业运营。
值得一提的是:TCAS并不是雷达,若没有与之兼容的应答器,则无法探测到飞机。
在美国,10000英尺以上高度飞行的飞机或在大型机场30英里范围内飞行的飞机必须配备应答器,有些应答器,例如老式的苏制系统,由于与TCAS不兼容,所以无法探测。
TCAS的管理条例只允许产生垂直机动指令,不允许产生转弯指令。
霍尼韦尔公司是惟一一家生产所有类型TCAS的制造商,目前使用的TCAS系统,半数以上出自该公司。
二次雷达、应答机:是机载设备与地面航空管制雷达配合使用的设备。
地面的管制雷达要求有能力辨别飞机的识别代码和气压高度,这种管制雷达称为二次雷达。
二次雷达向飞机发出询问信号,机上的应答机就被触发,应答机根据地面询问的模式自动产生应答脉冲信号,向地面雷达报告飞机的编码或飞行高度,这样在雷达屏幕上的飞机光点就会显示出飞机的编码和高度,这使航行管制工作的准确性大为提高,管制方式也由程序管制改变为雷达管制。
成答抓了作频率为1090MHz。
EFIS电子综合显示仪(EFIS)指以数字、符号、图形等形式在电子显示器上综合显示所需信息的仪表。
一般都以大屏幕的形式安装在仪表板上。
20世纪70年代,随着电子技术、计算机技术的不断发展,电子综合显示仪开始在飞机上使用。
电子综合显示仪的原始信息均来自其它记载设备,经过信息处理后,由字符图形发生器产生符合要求的信息画面。
所以综合显示器实质上是一个机载计算机的终端数据图形显示设备。
与传统机械显示器相比,电子综合显示仪具有很多优点。
首先,它实现了综合显示,减少了仪表数量,使仪表板布局简洁,便于观察。
其次,显示精度比较高,不增加附加误差。
同时,电子综合显示仪还具有很好的自检、故障监控和故障报警能力,一旦出现异常,能及时发出报警信息,提高飞机的安全性和可靠性。
电子综合显示仪反映了机载设备数字化的发展方向。
电子综合显示仪主要包括飞行参数综合显示仪、导航参数综合显示仪、地图显示仪,多功能显示仪、雷达显示仪等。
飞行参数综合显示仪与导航参数综合显示仪经常配套使用,用来显示姿态指引信息、航向信息、高度、速度信息等。
地图显示仪是一种直观的导航仪表,显示飞机的即时地理位置、航迹等信息。
多功能显示仪可以显示不同飞行阶段空勤人员所需要的各种信息。
EFIS也不是没有缺点,比如价格高,故障维修难度加大,费用增加。
装电子综合显示仪的飞机基本都有2套仪表系统,传统的+电子的(电子的就需要各种各样的传感器或输入信号),对只有一套仪表系统的轻型、超轻型飞机而言增加了采购成本和使用成本。
惯性导航惯性导航是指通过测量飞行器的加速度,自动进行积分运算,获得飞行器瞬时速度和瞬时位置数据的技术。
组成惯性导航系统的设备都安装在飞行器内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。
惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。
惯性测量装置包括加速度计和陀螺仪,又称惯性导航组合。
3个自由度陀螺仪测量飞行器的三个转动运动,3个加速度计测量飞行器的3个平移运动的加速度;计算机根据测量的各种信息,计算出飞机的速度和位置数据;显示器显示各种导航参数。
按照惯性导航组合在飞行器上的安装方式,可以分为平台式惯性导航系统和捷联式惯性导航系统。
前者安装在惯性平台的台体上,计算量小、精度高,但结构复杂、占用面积大;后者直接安装在飞行器上,结构简单、体积小,但由于工作条件不佳,仪表的精度会有所降低。
牛顿力学是惯性导航的理论基础。
1942年,德国在V-2火箭上首先应用了惯性导航原理。
1954年,惯性导航系统在飞机上试飞成功。
1958年,“舡鱼”号潜艇依靠惯性导航穿越北极在冰下航行长达21天。
我国从1956年开始研制惯性导航系统,1970年以来卫星、火箭以及国产飞机上,普遍采用了本国的惯性导航系统。
惯性导航初始化设定以后,飞行中还是很准的,与GPS相似,在你输入了预达转弯点的经纬度后,与自动驾驶仪配合,可以自动修正偏流、空速,保持预达时刻不变。
但理论上它是有积累误差的。
空地指挥在民航的大型机场,飞机的指挥调度系统是通过二次雷达来实现,即飞机上装有应答机,机场安装二次雷达,二次雷达将接收到的应答机信号进行解算,解算出飞机的位置和高度,在二次雷达的显示屏上显示飞机的位置、高度以及飞机的编号,管制员通过每一架飞机在屏幕的位置和高度进行指挥调度。
但二次雷达的价格昂贵,安装一部二次雷达需要花费几千万元人民币,并且飞机上必须配备二次应答机。
这些对中小型机场和通用飞机更是不可能的。
目前在一些通用机场的做法是通过“摆棋子”来指挥调度。
即每一个棋子写有飞机的编号,管制员与飞行员不断地通话,由飞行员来回答飞机的位置,管制员将写有该飞机编号的棋子放在图纸的相应位置上,管制员通过“棋子”在图纸的不同位置来进行指挥调度。
这种做法使管制员与飞行员工作量大大增大,而且易于出错。
通用飞机空地指挥系统利用GPS(卫星定位系统)与GIS(地理信息系统)结合来确定飞机在空中的位置。
其原理是飞机上的GPS将飞机的位置(经度、纬度、GPS时间)传给飞机上的机载计算机,机载计算机将接收到的GPS信息通过机载数传电台向地面发送。
地面计算机的屏幕上绘有机场的空域范围及飞机应该飞行的路径,地面计算机将接收到的信息通过坐标转换(WGS84-beijing1954),在地面计算机屏幕的相应位置显示出来,这样,就可以在地面计算机的屏幕上清楚地看出飞机偏离航线的情况及几架飞机的相互位置。