基于语音控制的智能小车设计
基于凌阳SPCE061A的语音控制小车设计
语音控制是最为直接的人机对话方式,而小车以其生动、典型、学习形式喜闻乐见、涉及知识面广等特点,可作为电子类专业同学们学习、实践的良好载体。
凌阳SPCE061A单片机,具有简单的语音处理功能,不需要外挂语音处理芯片,因此采用SPCE061A作为主控芯片。
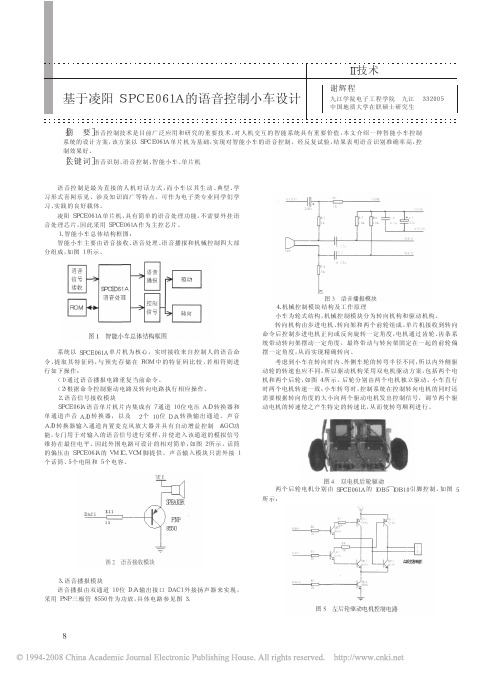
1、智能小车总体结构框图:智能小车主要由语音接收、语音处理、语音播报和机械控制四大部分组成,如图1所示。
图1智能小车总体结构框图系统以SPCE061A单片机为核心,实时接收来自控制人的语音命令,提取其特征码,与预先存储在ROM中的特征码比较,若相符则进行如下操作:(1)通过语音播报电路重复当前命令。
(2)根据命令控制驱动电路及转向电路执行相应操作。
2、语音信号接收模块SPCE06lA语音单片机片内集成有7通道10位电压A/D转换器和单通道声音A/D转换器,以及2个10位D/A转换输出通道。
声音A/D转换器输入通道内置麦克风放大器并具有自动增益控制(AGC)功能,专门用于对输入的语音信号进行采样,并使进入该通道的模拟信号维持在最佳电平。
因此外围电路可设计的相对简单,如图2所示。
话筒的偏压由SPCE06lA的VMIC、VCM脚提供。
声音输入模块只需外接1个话筒、5个电阻和5个电容。
图2语音接收模块3、语音播报模块语音播报由双通道10位D/A输出接口DAC1外接扬声器来实现,采用PNP三极管8550作为功放,具体电路参见图3。
图3语音播报模块4、机械控制模块结构及工作原理小车为轮式结构,机械控制模块分为转向机构和驱动机构。
转向机构由步进电机、转向架和两个前轮组成。
单片机接收到转向命令后控制步进电机正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度,从而实现精确转向。
考虑到小车在转向时内、外侧车轮的转弯半径不同,所以内外侧驱动轮的转速也应不同。
所以驱动机构采用双电机驱动方案,包括两个电机和两个后轮,如图4所示。
基于单片机语音控制小车的设计

安装传感器,如红外传感器、超声波传感器等,以检 测障碍物和路径。
语音识别模块
选用适合的语音识别模块,以实现小车的语音控制功 能的电池,如锂电池或镍氢电池,以满足小车的供电需求。
充电器
设计或选用适合电池的充电器,以确保电池的正常充电和使用。
电源管理电路
设计或选用适合的电源管理电路,以实现稳定的电压输出和电流控 制。
基于单片机语音控制小车的设计
• 引言 • 单片机介绍 • 语音识别技术 • 小车硬件设计 • 小车软件设计 • 测试与验证 • 结论与展望
01
引言
设计背景
语音控制技术的发展
实际应用需求
随着人工智能和语音识别技术的快速 发展,语音控制已经成为智能家居、 智能机器人等领域的重要应用。
在某些特定场景下,如家庭、办公室 等,需要一种能够通过语音控制的小 车来实现便捷的移动和操作。
01
特征提取
通过对语音信号进行预处理和特 征提取,提取出语音中的关键信 息,如音调、音高、音长等。
模式匹配
02
03
训练模型
将提取出的语音特征与预先训练 好的模型进行匹配,找出最相似 的模型,从而识别出语音内容。
通过大量的语音数据训练出高效 的模型,以提高语音识别的准确 率。
小车的控制逻辑设计
输入接口
03
除了基本的移动功能,还可以通过扩展接口实现其他功能,如
携带物品、巡逻监控等。
02
单片机介绍
单片机的定义
• 单片机是一种集成电路芯片,它包含了计算机的基本组成 单元,如中央处理器、存储器、输入输出接口等。它具有 体积小、功耗低、可靠性高等优点,广泛应用于各种嵌入 式系统中。
单片机的种类和特点
基于语音控制的自主寻迹与避障智能小车设计

• 133•以智能小车为研究对象,采用模块化的设计思路,设计出一款以SPCE061A单片机为核心,利用模糊控制算法设计出具有自主寻迹、避障和语音控制功能的智能小车样机。
为后续设计应用在特定环境或特定物件中奠定了基础。
1 概述现代智能化的高速发展已给我们生活带来极大的便利,它是各行各业发展的大方向(盛拓.基于电气工程自动化的智能化技术应用:山东工业技术,2018(1))。
设备按照预先设计好的方式运行,无需人力管理即可实现先前设定的目标。
本文所设计的智能小车是智能车方面的一个简易应用,结合语音识别技术,让小车按预定道路避开随机出现的障碍物实现自动控制和驱动行驶(胡媛媛,邓世建.基于红外光电传感器的智能寻迹小车设计:电子设计工程,2011,19(7):141-143)。
可以将小车应用在智能轮椅、玩具机器人及危险搜索、地质灾害等方面。
2 硬件设计方案小车采用4节1.5V的干电池串联作为电源,稳压处理后得到5V 和3.3V两种电压为系统供电。
以单片机SPCE061A为核心,利用寻迹检测模块、语音模块、避障模块和驱动模块的信息控制小车的前进、左右转弯和停车动作。
系统硬件设计框图如图1所示。
通过寻迹模块采集道路信息,根据单片机设定好的算法控制舵机转向和电机转速,以此实现智能小车对路径的识别和循迹。
图1 硬件设计框图2.1 驱动模块设计驱动模块相当于小车的“双脚”,检测到的道路信息进过单片机处理后发送给驱动模块,本设计选用IOB的8~11引脚作为驱动电机的输出口。
小车的前两轮驱动电路是H桥电路,两轮间有连杆和支点连接,控制小车的转动方向。
后两轮的驱动电路也是一个H桥电路,控制小车的前进和后退。
驱动电路如图2所示。
图2 后电机H桥驱动电路图2.2 循迹模块设计循迹模块相当于小车的“眼睛”,得到既定路线的基本信息,采用三个并排的ST188红外集成芯片安装在小车底部,选择单片机IOA口的5~7口作为信号输入端,信息经过单片机的处理,分析出小车的下一步动作应该是前进,左转,右转还是停车。
语音控制智能小车的设计

信息工程1 系统设计■1.1 设计任务和要求本设计的目标是设计并制作一辆语音控制的智能化小车。
主要达到的要求:(1)能够实现对小车的语音控制(包括前进、倒退);(2)控制的方式是实现无线语音遥控,且控制的距离不小于5米;(3)在能实现无线语音控制的基础上能实现小车角度的控制;(4)进一步分析小车系统的定位功能,在目标场地上能实现六个目标点的坐标反馈。
■1.2 设计方案1.2.1 实现方法要求设计并制作语音控制的智能化小车(下文简称小车),能够实现对小车的语音控制,控制的方式是无线语音控制,且控制的距离不小于5米,在能实现小车基本动作的基础上实现小车左右特定角度的偏转。
本设计可分为两个系统:控制系统和小车系统。
小车系统可分为:控制模块、无线接收模块、角度控制模块、显示模块、电机驱动模块;控制系统可分为:语音识别系统、发射模块。
设计主要是采用STM32F030单片机作为小车系统的核心控制芯片;以nRF401模块作为小车的无线接收模块;以ZCC220型号的电子罗盘作为角度控制模块;显示部分则采用3连LED数码管进行显示。
控制器部分的语音识别系统采用凌阳61简易板;用nRF401模块作为控制器信号的发送部分。
小车系统的结构框图如图1所示,小车系统原理图如图2所示;1.2.2 各部分方案设计(1)控制模块采用ST公司成熟低功耗微处理器的STM32F030单片机作为主控MCU。
工作主频为48MHz,其内核为ARM 的Cortex M0架构,具备32k闪存及4k缓存,处理能力相较之前的8位或16位有很大的提升,同时在功耗上有所降低。
(2)无线接收模块采用nRF401无线收发模块。
nRF401可以实现高效的无线传输,传输的速率可达20K,发射功率可调,最大发射功率在+10dBm,灵敏度在-105dBm。
天线接口设计为差分天线,可以使用低成本的PCB天线[1]。
nRF401天线在硬件设计接法简单,数据在传输过程简单且比较稳定,传输抗干扰能力强,误码率小。
基于单片机的语音控制小车系统设计与实现

基于单片机的语音控制小车系统设计与实现摘要
随着微控制器技术的发展,单片机在实现物联网的各种应用方面取得
了较大的进步。
本文基于单片机技术的发展,设计并实现了一种基于语音
控制小车的系统。
该系统帮助用户控制小车的行驶状态和运行方向,实现
用户所需要的控制功能。
系统设计使用ESP8266模块实现WIFI连接,
MPU6050模块实现空间姿态监测,并采用DC直流电机控制小车,并采用
语言识别技术识别用户语音,进而实现控制。
本文介绍了系统的功能要求,硬件组件和软件结构,以及整个系统的实现流程。
在硬件电路方面,本文
介绍了最终系统的电路原理图及其各个模块之间的电路连接。
在软件结构
方面,本文介绍了整个系统的软件架构,包括硬件驱动层的实现和应用层
的实现,以及语音识别模块的设计与实现。
最终,本文实现了一个基于单
片机的语音控制小车系统,这种系统可以满足用户的实际需求,可以有效
提高小车的可控性。
关键词:单片机;小车;语音控制;ESP8266;MPU6050
1 Introduction
随着物联网技术的发展,单片机在实现各种应用方面取得了长足的进步。
毕业设计 语音控制小车
毕业设计语音控制小车语音控制小车系统的设计与实现1章语音控制小车的设计与实现 (3)1.1 案例点评 (3)1.2 设计任务 (3)1.3 设计意义 (5)1.4 设计方案及实现 (6)1.4.1 系统组成结构和工作原理 (6)1.4.2 硬件电路设计 (8)1.4.3 软件设计 (23)1.4.4 系统调试 (62)1章语音控制小车的设计与实现1.1 案例点评1.2 设计任务语音控制小车是凌阳大学计划推出的基于SPCE061A 的代表性兴趣产品,它配合61 板推出,综合应用了SPCE061A 的众多资源,打破了传统教学中单片机学习枯燥和低效的现状。
小车采用语音识别技术,可通过语音命令对其行驶状态进行控制。
语音控制小车的主要功能:1.可以通过简单的I/O 操作实现小车的前进、后退、左转、右转功能;2.配合SPCE061A 的语音特色,利用系统的语音播放和语音识别资源,实现语音控制的功能;3.可以在行走过程中声控改变小车运动状态;4.在超出语音控制范围时能够自动停车。
参数说明:车体:双电机两轮驱动供电:电池(四节AA:1.2V×4 或1.5V×4)工作电压:DC 4V~6V工作电流:运动时约200mA扩展功能:1.添加跳舞功能,小车可以根据播放音乐的节奏跳舞;2.可以自行安装各类传感器,配合程序实现小车的循迹、避障等功能;3.添加遥控功能,实现声控+无线遥控的双控功能。
(备注:可以自行添加各种传感器,实现避障、循迹、跟踪等功能。
)1.3 设计意义语音控制技术是目前广泛应用和研究的重要技术,对人机交互的智能系统具有重要价值,本文介绍了一种智能小车控制系统的设计方案,该方案以SPCE061A 单片机为基础,实现对智能小车的语音控制。
经反复试验,结果表明语音识别准确率高,控制效果好。
是一个典型的语音识别应用方案。
本设计方案结构简单,以单芯片实现了语音播放与识别以及电机控制功能,相当于“语音识别芯片+普通单片机”的功能。
于基语音识别的智能小车设计--毕业设计

基于语音识别的智能小车摘要随着计算机技术、模式识别和信号处理技术及声学技术等的发展,使得能满足各种需要的语音识别系统的实现成为可能。
近二三十年来,语音识别在计算机、信息处理、通信与电子系统、自动控制等领域中有着越来越广泛的应用。
本设计是语音识别在控制领域的一个很好实现,它将原本需要手工操作的工作用语音来方便地完成。
语音识别按说话人的讲话方式可分为孤立词(Isolated Word)识别、连接词(Connected Word)识别和连续语音(Continuous Speech)识别。
从识别对象的类型来看,语音识别可以分为特定人(Speaker Dependent)语音识别和非特定人(Speaker Independent)语音识别。
本设计采用的识别类型是特定人孤立词语音识别。
本系统分上位机和下位机两大方面。
上位机利用PC上MATLAB强大的数学计算能力,进行语音输入、端点监测、特征参数提取、匹配、串口控制等工作,根据识别到的不同语音通过PC串口向下位机发送不同的指令。
下位机是单片机控制的一个小车,单片机收到上位机传来的指令后,根据不同的指令控制小车完成不同的动作。
该设计对语音识别的现有算法进行了验证和实现,并对端点检测和匹配算法进行了些许改进。
本设计达到了预期目标,实现了所期望的功能效果。
关键词:MATLAB,语音识别,端点检测,LPC,单片机,电机控制SMART CAR GASED SPEECH RECOGNITIONABSTRACTWith the development of computer technology,pattern recognition,signal processing technology and acoustic technology etc, the speech recognition system that can meet the various needs of people is more possible to achieve.The past three decades, the voice recognition in the field of computer, information processing, communications and electronic systems, automatic control has increasingly wide range of applications.Speech recognition by the speaker's speech can be divided into isolated word (Isolated Word) identification, conjunctions (Connected Word) and continuous speech recognition (Continuous Speech) identification. Identifying the type of object from the point of view, the voice recognition can be divided into a specific person (Speaker Dependent) speech recognition and non-specific (Speaker Independent) speech recognition. This design uses the identification type is a specific person isolated word speech recognition.This design is of a good implementation of speech recognition in the control field, it does the work that would otherwise require manual operation by the voice of people easily.This system includes two major aspects:the host system and the slave system. The host system use the MATLAB on the computer which has powerful mathematical computing ability to do the work of voice input, endpoint monitoring, feature extraction, matching, identification and serial control,then it send different commands through the PC serial port to slave system according different recognised voice. The slave system is a car controlled by a single-chip micro-controller.It controls the car do different actions according different instructions received.The design is checking and realization of the existing speech recognition algorithm and I the endpoint detection and matching algorithms were slight improved.This design achieved the expected goals and achieved the desired functional effect.KEY WORDS:MATLAB,Speech Recognition,Extreme Points Test,LPC,Chip Microcomputer,Motor Drive目录前言 (1)第1章系统总体设计方案介绍 (3)第2章上位机设计 (4)§2.1 语音识别简介 (4)§2.1.1 语音识别发展 (4)§2.1.2 语音识别的分类 (4)§2.2 声音录入 (5)§2.3 声音的预处理 (6)§2.3.1 欲加重处理 (6)§2.3.2 分帧处理 (6)§2.4 端点检测 (6)§2.4.1 过零率 (6)§2.4.2 音量 (7)§2.4.3 过零率和音量积谱 (8)§2.4.4 用过零率和音量积谱来检测端点 (9)§2.5 特征参数提取 (10)§2.5.1 特征参数概述 (10)§2.5.2 用MATLAB实现LPC系数的计算 (14)§2.6 语音识别中的模式匹配 (14)§2.6.1 DTW算法原理 (14)§2.6.2 程序实现 (16)§2.7 MATLAB上的GUI设计 (18)第3章下位机设计 (20)§3.1 小车总体设计 (20)§3.1.1 小车总体框图 (20)§3.1.2 小车结构设计 (20)§3.2 小车硬件设计 (20)§3.2.1 单片机电路设计 (21)§3.2.2 驱动电路设计 (23)§3.2.3 稳压电路设计 (24)§3.3 小车软件设计 (24)§3.3.1 主程序流程图 (24)§3.3.2 部分主程序 (25)§3.3.3 底层驱动程序 (27)结论 (29)参考文献 (30)致谢 (31)附录 (32)前言随着计算机技术、模式识别和信号处理技术及声学技术等的发展,使得能满足各种需要的语音识别系统的实现成为可能。
语音控制车辆方案设计案例
语音控制车辆方案设计案例背景随着人工智能技术的不断发展和普及,智能家居、智能出行等领域得到了快速发展。
其中,语音控制技术是不可或缺的一部分。
在车辆行业中,语音控制技术应用于车载系统已经成为了一种趋势。
以此背景为基础,本篇文章将给出一种语音控制车辆的方案设计案例,希望能够为这一领域的实践提供参考。
方案设计方案意图本方案的意图是:使用语音控制技术,实现对车辆行驶过程中音乐播放和灯光开关等功能的控制。
技术选型在实现本方案的过程中,需要使用到的技术主要包括:•语音识别技术•蓝牙通信技术•车载灯光控制技术•车载音乐播放控制技术其中,语音识别技术是本方案的核心技术,用于识别车内驾驶员的指令并进行解析;蓝牙通信技术用于实现语音指令到车载系统的传输;车载灯光控制技术用于实现灯光的开关控制;车载音乐播放控制技术用于实现音乐的播放控制。
方案流程该方案的流程如下:1.驾驶员发出语音指令;2.车载系统通过语音识别技术进行指令识别;3.车载系统将识别结果通过蓝牙传输至控制模块;4.控制模块根据指令进行车载灯光控制或车载音乐播放控制。
其中,车载系统和控制模块之间通过蓝牙通信技术进行数据传输,保证指令能够准确、快速地传输,并且能够实现指令的远程控制。
技术难点在该方案的实施过程中,可能会遇到以下技术难点:•语音识别准确性问题•指令传输迟缓问题•指令解析失误问题针对这些问题,可以采取如下解决方案:•语音识别技术需要充分测试和调整,并针对特定场景进行训练和优化,以提高识别率和准确性;•采用高速、稳定的蓝牙通信技术,并根据具体的应用场景进行优化;•推荐采用先进的指令解析算法,以提高指令解析的准确性和稳定性。
未来展望随着物联网、人工智能技术等的发展,语音控制技术的应用范围会越来越广泛,车载系统也会成为语音控制技术的主要应用场景之一。
在未来,车载系统的语音控制技术将会更加智能化、集成化,让驾驶员的行车过程更加安全、便捷、舒适。
总结本文基于语音控制技术,提出了一种语音控制车辆方案设计案例,并实现了对车载灯光和车载音乐播放等功能的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于语音控制的智能小车设计
随着人工智能和物联网技术的发展,智能小车已经成为了现实。
当今,智能小车已经被广泛应用于工业和家庭领域。
其中,基于语音控制的智能小车是最受欢迎的,因为它是一种非常便捷的控制方式。
基于语音控制的智能小车可以利用语音识别技术,识别用户的语音指令并响应相应的运动。
本文我们将讨论基于语音控制的智能小车设计。
首先,我们将讨论语音识别技术和如何将其应用到智能小车控制上。
其次,我们将讨论智能小车的控制系统和机械结构设计。
最后,我们将介绍智能小车的应用场景和未来发展方向。
一、语音识别技术在智能小车中的应用
语音识别技术是一种能够将说话者的语音转化为文字的技术。
它可以为智能小车提供一种智能的控制方式。
在智能小车中,语音识别技术可以构建一个与硬件设备上的语音传感器相连的语音接口。
当用户说话时,语音识别系统将识别用户的指令并将其转化为数字信号。
数字信号通过智能小车的控制系统进行处理,从而实现小车的相应控制。
二、智能小车的控制系统和机械结构设计
智能小车的控制系统由语音识别模块、数据处理模块、电机控制模块和电源模块等构成。
语音识别模块在收到语音指令后,会将其转化为数字信号。
数据处理模块会对数字信号进行处理,并根据指令向电机控制模块发送相应的控制信号。
电机控制模块会控制小车的轮子向前、向后或转弯。
电源模块则提供小车所需的电力。
智能小车的机械结构通常包括一个底盘、轮子、马达、电池等。
底盘是小车的主要结构,承受着所有其他部件的重量。
轮子是小车移动的主要部分,通常由橡胶或金属制成。
马达是小车的动力源,通过控制电机控制模块的转速和旋转方向,以控制小车的运动。
电池则为小车提供所需的电能,通常是锂电池。
三、智能小车的应用场景和未来发展方向
基于语音控制的智能小车可以应用于家庭,例如用来代替家政服务机器人;可以利用在工业中,例如监测生产线或物流仓库的视线盲区;甚至可以用于军事或警务领域,例如通过语音指令控制无人机。
随着技术的进步,智能小车将会越来越智能化。
未来的智能小车将会被封装在更小、更轻便的设备中,具备更高的运动性能和更多的功能。
此外,智能小车还将具备更广的工作区域和更高的可靠性。
最后,黑科技如人车互动、成像识别等将使智能小车拥有更为丰富的应用场景。