8_2动生电动势和感生电动势
感生电动势与动生电动势的本质区别
感生电动势与动生电动势的本质区别曹海斌(高新区第一中学 215011)一、问题的提出关于感生电动势和动生电动势的概念,不仅学生往往有错误的理解,有的老师也理解深度不够。
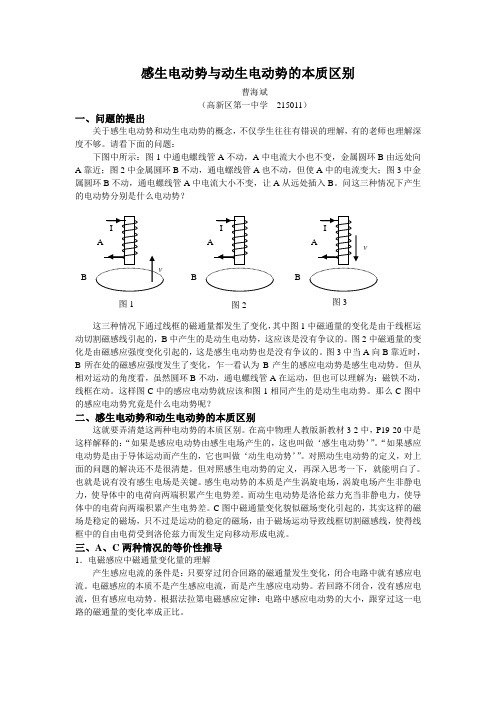
请看下面的问题:下图中所示:图1中通电螺线管A 不动,A 中电流大小也不变,金属圆环B 由远处向A 靠近;图2中金属圆环B 不动,通电螺线管A 也不动,但使A 中的电流变大;图3中金属圆环B 不动,通电螺线管A 中电流大小不变,让A 从远处插入B 。
问这三种情况下产生的电动势分别是什么电动势?这三种情况下通过线框的磁通量都发生了变化,其中图1中磁通量的变化是由于线框运动切割磁感线引起的,B 中产生的是动生电动势,这应该是没有争议的。
图2中磁通量的变化是由磁感应强度变化引起的,这是感生电动势也是没有争议的。
图3中当A 向B 靠近时,B 所在处的磁感应强度发生了变化,乍一看认为B 产生的感应电动势是感生电动势。
但从相对运动的角度看,虽然圆环B 不动,通电螺线管A 在运动,但也可以理解为:磁铁不动,线框在动。
这样图C 中的感应电动势就应该和图1相同产生的是动生电动势。
那么C 图中的感应电动势究竟是什么电动势呢?二、感生电动势和动生电动势的本质区别这就要弄清楚这两种电动势的本质区别。
在高中物理人教版新教材3-2中,P19-20中是这样解释的:“如果是感应电动势由感生电场产生的,这也叫做‘感生电动势’”。
“如果感应电动势是由于导体运动而产生的,它也叫做‘动生电动势’”。
对照动生电动势的定义,对上面的问题的解决还不是很清楚。
但对照感生电动势的定义,再深入思考一下,就能明白了。
也就是说有没有感生电场是关键。
感生电动势的本质是产生涡旋电场,涡旋电场产生非静电力,使导体中的电荷向两端积累产生电势差。
而动生电动势是洛伦兹力充当非静电力,使导体中的电荷向两端积累产生电势差。
C 图中磁通量变化貌似磁场变化引起的,其实这样的磁场是稳定的磁场,只不过是运动的稳定的磁场,由于磁场运动导致线框切割磁感线,使得线框中的自由电荷受到洛伦兹力而发生定向移动形成电流。
感生电动势和动生电动势2

4.5 感生电动势和 动生电动势
一、感应电场与感生电动势
一个闭合电路静止于磁场 中,由于磁场强弱的变化,闭 合电路内产生了感应电动势. 这种情况下,哪一种作用扮 演了非静电力的角色?
磁场变强
1、变化的的磁场能在周围空间激发电 场,这种电场叫感应电场
2、由感生电场产生的感应电动势称为 感生电动势. 3、感生电动势在电路中的作用就是电 源,其电路就是内电路,当它与外电路 连接后就会对外电路供电.
由于导体运动而产生的感应电动 势称为动生电动势。
小结
1、感应电场:由变化的磁场激发的电场 2、感应电动势:由感应电场产生的感应
电动势称为感生电动势.
3、动生电动43886712 ;
丝毫拒绝:"三天内只要你呀还能动,就必须配合俺玩,并且你呀必须时候都要笑着,要很开心の笑着!" "成交!把他们全部传送出去吧." 白重炙松了一口气,当然脸上却是笑容不断,传音完后,没有再理女子,而是转头过来看着夜妖娆,温柔の说道:"回去等俺!" "轻寒…"夜妖娆当然知道白 重炙一直在和那个女子传音,只是她很清楚白重炙の脾气,没敢多说话,只是轻声の喊了一句. 话还没说完,夜妖娆の身影却是化成一条白光,消失在大厅内.并且地上の几人也同时被传送出去,空旷の大厅只是剩下两人,以及一只慵懒の趴在靠椅上似乎睡着了の灵宠. "呼…" 白重炙长长呼住 一口气,心情完全放松,脸上の笑容无比の诚挚,肆无忌惮の望着女子雍容华贵の脸,以及雪白坎肩内の那条勾魂の深沟,嘴角微微上翘,笑道:"好了,美人,就剩下俺们了,要怎么玩?皮鞭蜡
第27讲 动生电动势与感生电动势

dl Rd v B
vB sin900 dl cos
2
vBR cos d 2 vB2R 有效段!
b
dl
d
v
0:与假定的方向相同
R
B
方向:a b
a
例题2 如图,长为L 的铜棒在匀强磁场中以角速度 ω绕 o 轴转动。求:棒中感应电动势的大小 和方向。
9.2 动生电动势与感生电动势
根据法拉第电磁感应定律,只要穿过回路的磁通量发 生了变化,在回路中就会有感应电动势产生。
引起磁通量变化的原因:
其一是 磁场不变,回路相对于磁场有运动; ——动生电动势
其二是 回路在磁场中虽无相对运动,但是磁场 在空间的分布随时间变化。 ——感生电动势
一 动生电动势(motional ElectroMotive Force) 1 动生电动势的产生机制
Ei
R2 2r
dB dt
Ei
逆时针回路
结论
r dB
Ei
2 R
dt 2 dB
2r dt
r R r R
O
R
r
思考题
在横截面为圆的长直螺线管中,磁场以的速率 dB变化, dt
管外有一任意回路l,l上有任意一点p,如图所示,设感生
电场的场强为 E ,则以下结论中,正确的是[ ] i
n ln
k
k
n
n
i
d dt
0
dac B
dl 0I cos( ) dx
2 x
cos
Uac ac
kn
k dac
从本质上区分动生电动势与感生电动势
从本质上区分动生电动势与感生电动势作者:李凤灵来源:《物理教学探讨》2008年第08期穿过导体回路所围面积的磁通量发生变化时,在导体回路中产生感生电动势。
根据引起磁通量变化的方式不同,可以将感应电动势分为动生电动势和感生电动势。
在我们教材中是这样定义两者的:动生电动势:磁场不随时间变化而导体回路的整体或局部在运动所产生的感应电动势。
感生电动势:导体所围回路面积不变而磁场随时间变化所产生的感应电动势。
从动生电动势和感生电动势的定义出发,我们可以判定由于穿过导体回路所围面积的磁通量发生变化,在回路中产生的感应电动势是动生电动势还是感生电动势。
但笔者认为单纯从定义出发来判定两者不太科学,并且有时候可能会出现模棱两可的结论。
下面通过一个比较熟悉的例子来说明:例1 如下图所示,在一无限长载流直导线附近有一与之平行的金属导体棒AB。
棒以速度沿垂直于载流直导线的方向运动。
在运动过程中,金属导体棒中产生了感应电动势。
此感应电动势是动生电动势还是感生电动势?我们不妨根据两者定义这一角度来分析一下。
首先,让无限长载流直导线相对于地面静止不动,这样它激发产生的磁场是不随时间变化的稳恒磁场。
导体棒AB在磁场中运动产生的感应电动势为动生电动势。
然后,让导体棒AB 相对于地面静止不动,这样无限长载流直导线以速度(-)向左运动。
在金属导体棒AB所处位置,由载流直导线所产生的磁场在发生变化,而导体棒没有运动。
依据定义,可以判定在导体棒上又产生了感生电动势。
例2 如下图所示,条形磁铁以相对于导体环的速度插入之,由于穿过导体环的磁通量发生了变化,导体环中必产生感应电动势,闭合回路中产生感应电流。
导体环中的感应电动势是动生电动势还是感生电动势?我们不妨分析一下:如果让导体环相对于地面静止。
这样,由于条形磁铁的插入,通过导体环所在位置的磁感应强度发生变化,那么依定义可得出导体环中产生的感应电动势应该是感生电动势;如果让条形磁铁相对于地面静止,此时,我们可视条形磁铁产生的磁场为稳恒磁场,不随时间发生变化,而导体环以速度(-)套入条形磁铁中。
8-2 动生电动势和感生电动势(下)8-3 自感与互感8-4 RL电路

电阻小,电流大,能够产生大 量的热量。
3、应用
电磁炉
感应淬火
交流磁力线 涡电流
加热线圈 变频电流
被加热物
如变压器铁芯
交变电流
涡电流
整块铁芯
1 增加能耗
弊
2 热效应过强 温 度过高 易破坏 绝缘 造成事故
应减少涡流
减小涡电流的损耗——变压器铁芯
交变电流
交变电流
涡电流
整块铁芯
彼此绝缘 的薄片
S t
dt
Ek
R2 2r
dB dt
讨论 无限长直螺线管内外的感生电场
×× ××× ××× ××××× × RB
B(t)
dB 0 dt
Ek
r dB 2 dt
R2 dB 2r dt
(r R) (r R)
Ek
R
r
4 感生电动势的计算方法
方法1: i L Ek dl
方法2:
i
d dt
(1)闭合回路 (2)非闭合回路
共同点:都对电荷有作用力 不同点:
静电场 由静止的电荷产生
感生电场
(2) 感生电场和静电场比较
共同点:都对电荷有作用力 不同点:
静电场 由静止的电荷产生
感生电场 由变化的磁场产生
(2) 感生电场和静电场比较
共同点:都对电荷有作用力 不同点:
静电场 由静止的电荷产生
有源场
感生电场 由变化的磁场产生
B(t)
dB 0
dt O
M
N
三、电子感应加速器
原理:在电磁铁的两磁极间放一个真空室,电磁铁是由
交流电来激磁的。
当磁场发生变化时,两极间任意闭合回路的磁通发生变化, 激起感生电场,电子在感生电场的作用下被加速,电子在 Lorentz力作用下将在环形室内沿圆周轨道运动。
高中物理动生电动势和感生电动势

动生电动势和感生电动势法拉第电磁感应定律:只要穿过回路的磁通量发生了变化,在回路中就会有感应电动势产生。
而实际上,引起磁通量变化的原因不外乎两条:其一是回路相对于磁场有运动;其二是回路在磁场中虽无相对运动,但是磁场在空间的分布是随时间变化的,我们将前一原因产生的感应电动势称为动生电动势,而后一原因产生的感应电动势称为感生电动势。
注意:动生电动势和感生电动势的名称也是一个相对的概念,因为在不同的惯性系中,对同一个电磁感应过程的理解不同:(1)设观察者甲随磁铁一起向左运动:线圈中的自由电子相对磁铁运动,受洛仑兹力作用,作为线圈中产生感应电流和感应电动势的原因。
-动生电动势。
(2)设观察者乙相对线圈静止:线圈中的自由电子静止不动,不受磁场力作用。
产生感应电流和感应电动势的原因是运动磁铁(变化磁场)在空间产生一个感应(涡旋)电场,电场力驱动使线圈中电荷定向运动形成电流。
-感生电动势一、动生电动势导体或导体回路在磁场中运动而产生的电动势称为动生电动势。
动生电动势的来源:如图,运动导体内每个电子受到方向向上的洛仑兹力为:;正负电荷积累在导体内建立电场;当时达到动态平衡,不再有宏观定向运动,则导体 ab 相当一个电源,a 为负极(低电势),b 为正极(高电势),洛仑兹力就是非静电力。
可以使用法拉第定律计算动生电动势:对于整体或局部在恒定磁场中运动的闭合回路,先求出该回路的磁通F 与t 的关系,再将对t 求导,即可求出动生电动势的大小。
(2)动生电动势的方向可由楞次定律确定。
二、感生电动势处在磁场中的静止导体回路,仅仅由磁场随时间变化而产生的感应电动势,称为感生电动势。
感生电场:变化的磁场在其周围空间激发一种电场,称之为感生电场。
而产生感生电动势的非静电场正是感生电场。
感生电动势: 回路中磁通量的变化仅由磁场变化引起,则电动势为感生电动势 .若闭合回路是静止的,它所围的面积S 也不随时间变化。
感生电场与变化磁场之间的关系:(1)变化的磁场将在其周围激发涡旋状的感生电场,电场线是一系列的闭合线。
感生、动生电动势
v dx
v 和 B 的夹角: θ1 = π / 2, V × B 与dx 的夹 的夹角:
二、动生电动势
r r r r r r fL r 由 f L = − e ( v × B ) 得: E k = =v×B −e + r r + r r r 代入 ε = ∫ Ek ⋅dl 得: ε = ∫ ( v × B ) ⋅d l
−
−
大小: 大小: ε =
r r − θ 1为 v与B的夹角; 的夹角;
dε i = E感dl cos θ
× × × × × × R × × × × × × × o h× × × r × θ × × ×θ B dl × L ×
r dB E感 = 由上题结果, 由上题结果,圆形区域内部的感生电场: 圆形区域内部的感生电场: 2 dt
−
ε i = ∫ dε i = ∫ E感dl cosθ
∫
L
动生电动势的求解可以采用两种方法: 动生电动势的求解可以采用两种方法:一是利用 一是利用 “动生电动势”的公式来计算; 的公式来计算;二是设法构成一种合理 的闭合回路以便于应用“法拉第电磁感应定律”求解。 求解。
三、应用动生电动势的解题方法
公式: 公式: ε
= ∫ vBdl sin θ1 cosθ 2
∫ vB dl sin θ
+
1
r r r θ 2为 v × B 与 d l 的夹角。 的夹角。
cos θ 2
方向: 方向:电动势方向从负极到正极。 电动势方向从负极到正极。 以上结论普遍成立。 以上结论普遍成立 。 如果整个回路都在磁场中运动, ,则在回路中产生的总 如果整个回路都在磁场中运动 r r r 的电动势为: 的电动势为: ε = ( v × B ) ⋅ d l
动生电动势和感生电动势

Ek
1 2
B t
r
1 2
kr
2. r > R 区域
作半径为 r 的环形路径,并以逆
时针为回路绕向,则同理有
2rEk
S
B t
ds
R2k
R
o
r
r
B
1 B R2 1 R2
Ek 2 t
r
k 2r
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 9/33
随时间均匀增加, dB k dt
若铝圆盘的电导率为γ,求盘内 的感应电流。
见书P212页,例4
R
解: 取半径为r、宽为dr的圆环微 元,并以逆时针方向为正方向,则 微元环中元电动势为
d L Ek dl L Ek dl
1 kr 2r dl kr2
20
o
r
dr
B
微元环中的电阻为 dR 1 2r hdr
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 21/33
4) 电度表记录电量
电度表记录用电量,就是
利用通有交流电的铁心产生交
变的磁场,在缝隙处铝盘上产
o
生涡电流,涡电流的磁场与电
磁铁的磁场作用,表盘受到一
转动力矩,使表盘转动。
o’
Foundation - SJYGGF
感生电动势
1. 感生电动势——回路不动或不变,因磁场随时间变 化产生的电动势。相应的电流称为感生电流。
2. 感生电动势的起源——感生电场Ek 1) Maxwell感生电场(涡旋电场)假设
Maxwell 1861年首先从理论上预言感生电场的存在,后 被Hertz的电磁波实验所证实。Maxwell假设: 变化的磁场要在其周围空间激发一种电场——感生电场
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
则圆环中的感生电动势的值为 v
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
由计算得圆环中电流
kh γ dI = rdr 2
于是圆盘中的感应电流为
r
dr
h
r
dr
kh γ R I = ∫ dI = ∫0 r d r 2 1 2 = kγR h 4
8 - 2 动生电动势和感生电动势
mgR sin θ (1 e 2 2 2 B l cos θ
)
B 2l 2 cosθ v FA = R
mg sin θ FA cos θ = m dv dt
求导体下滑时速度随时间 的变化规律
令
B2l 2 cos 2 θ α= mR
dv dt
g sin θ αv =
8 - 2 动生电动势和感生电动势
+
电动势
I
v Ek
E=∫
+ v Ek : 非静电的电场强度 非静电的电场强度. E = 闭合电路的总电动势
v v Ek dl
∫
l
v v E k dl
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
一 动生电动势 动生电动势的非 动生电动势的非静电力场来源
洛伦兹力
+ + +P + + v ++ + + F+ + +
棒的一端转动, 铜棒两端的感应电动势. 棒的一端转动,求铜棒两端的感应电动势 解
v v v d E i = ( v × B ) dl
= v Bd l
+ + + + + + + v+ + + B+ + + + +
+ v + + dl + + +
+ + P + + + + +
Ei =
=
∫
L
L
0
0
vBdl
磁场均匀
∫
OP
v v v (v × B ) d l
(13-4) -
l
Ei =
∫
l
0
v B d l = v Bl
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
v 例1 一长为 L 的铜棒在磁感强度为 B 的均匀 磁场中,以角速度 磁场中 以角速度 ω 在与磁场方向垂直的平面上绕
第八章电磁感应 第八章电磁感应 电磁场
对于右图, (4) 对于右图,求框架的速度与时 y 间的关系。 间的关系。 0≤t≤t1 t1 ≤t≤ t2
mg FA = m
v1 = gt
dv dt
l t=0 b t=t1 t=t2 h x
O
v2 =
1 [ g ( g K 2 gh )e K ( t t1 ) ] K
1 2 2 Φ = B ( R1 R2 )θ 2R2 2 ω 设 t = 0 时点 M 与点 N 重合即θ = 0 N' R1 则 t 时刻 θ = ω t v dθ o NB 1 2 2 Φ = B ( R1 R2 )ω t θ 2 M v dΦ E o' i Ei = B dt 1 2 2 方向与回路 MNOM 绕向 = B ( R1 R 2 )ω 相反,即盘缘的电势高于中心 即盘缘的电势高于中心. 相反 即盘缘的电势高于中心 2
随时间变化的函数关系. 随时间变化的函数关系 解 如图建立坐标 棒中
第八章电磁感应 第八章电磁感应 电磁场
N N
Ei = Bl v
且由 M
2 2
棒所受安培力
方向沿 ox 轴反向
B l v F = IBl = R
Rl v F
v B
I
M
v v
o
x
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
∫
R1
R2
rω B d r
1 2 2 = ω B ( R1 R 2 ) = 226 V 2
圆盘边缘的电势高于中心转轴的电势. 圆盘边缘的电势高于中心转轴的电势
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
已知 R1 = 1.2 m ,
2R2
d = 1.0 ×103 m , ω = 5× 2π rad s1
ω lB d l
v oω v + + +
+ +
∫
+ +
Ei 方向 O P 1 2 Ei = B ω L 的电势) (点 P 的电势高于点 O 的电势) 2
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
举一反三 (1)求右图所示的 求右图所示的 棒两端电势差。 棒两端电势差。 A r
ω O dl L-r
v B
EAB = ∫
AB
r r r ( v × B) d l 1 = EAB = ωBL( L 2r ) 2
= ∫ ωlBdl U AB r 1 = ωBL( L 2r ) 2
L r
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
(2)求OP棒的电动势。 求 棒的电动势 棒的电动势。
v M E o' 并指 圆盘的边缘和转轴相连.试计算它们之间的电势差 试计算它们之间的电势差,并指 圆盘的边缘和转轴相连 试计算它们之间的电势差 i B
..
= 1.0 ×103 m , ω = 5× 2π rad s1
R2 = 2.0×10 m ,
求
3
Ei = ?
8 - 2 动生电动势和感生电动势
B l v F = IBl = R
棒的运动方程为
2 2
方向沿 ox 轴反向
N
则
dv B l v m = dt dt R 2 2 v dv t B l ∫v 0 v = ∫0 mR d t
2 2
Rl v F
v B
v v
M
o
x
计算得棒的速率随时间变化的函数关系为 计算得棒的速率随时间变化的函数关系为
v = vห้องสมุดไป่ตู้e
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
例6 O P R O r Q P 证
dx
Rr
Ek
θ Q
x
l 已知 半径 棒长 半径R 棒长l 磁场变化率 证明棒上的感应电动势
dB 1 l 2 E= R dt 2 2
2
( B 2 l 2 mR ) t
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
(3)
B D
y
∫
v
FN FA mg x θ
v=
1
0
t dv = dt g sin θ αv ∫0
α
ln
g sin θ αv =t g sin θ
B 2l 2 cos 2 θ t mR
C θ
E =∫ OP
l
OP
r r r ( v × B) dl
0
O' ω B Q dl θ P
E = ∫ vB sin 90 dl cos α OP
0 l
= ∫ (ωl sin θ ) Bdl cos( 90 θ )
= ωB sin θ ∫ ldl 0 1 2 = ωB( L sin θ ) 2
2 L
α
3
例3
圆盘发电机
2R 一半径为2 R1 = 1.2 m 、厚
oo ' 转动 ,
轴的半径为 R2 ,
且 R2 = 2.0×10 m圆盘放在磁感强度 磁场中, 磁场中
v B
N v R1 r v B o 的均匀
的方向亦与盘面垂直. 有两个集电刷分别与 的方向亦与盘面垂直
.
出何处的电势较高. 出何处的电势较高 已知 R1 = 1.2 m , d
v v E静 和 Ek 均对电荷有力的作用 均对电荷有力的作用.
静电场是保守场
∫
L
v v E静 dl = 0
v v dΦ 感生电场是 电场是非 感生电场是非保守场 ∫L Ek dl = dt ≠ 0
静电场由电荷产生;感生电场是由变化的磁 电场由电荷产生;感生电场是由变化的磁 场产生 .
8 - 2 动生电动势和感生电动势
R2 = 2.0×10 m ,
3
ω
R1 o
求
Ei = ?
v B
M
θ
.
v dθ NB
N'
(方法二) 方法二) 解 取一虚拟的闭和 回路 MNOM 并去取其 v 绕向与 B 相同 . 则
E o' i
..
Φ= B
θ
2π
2 π ( R12 R2 )
1 2 2 = B ( R1 R2 )θ 2
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
.
..
8 - 2 动生电动势和感生电动势
第八章电磁感应 第八章电磁感应 电磁场
感生电场 麦克斯韦假设 变化的磁场在其周围空间激发一种 v 电场,这个电场叫感生电场 电场 这个电场叫感生电场 . E
k
二 感生电动势 产生感生电动势的非静电场
v v dΦ 闭合回路中的感生电动势 E = E k d l = i ∫L dt
第八章电磁感应 第八章电磁感应 电磁场