高中物理动生电动势和感生电动势汇总
11-2、动生电动势、感生电动势
CA
I
0 I iAB vc iCA 0 B v B 2a v iBC (v B) dl
c dl A x a b
o
iBC
( X d iBC v B)dl C vB cos( )dl dx vB cosdl vB cos dl
注意:
r B L E感 2 t B 0 E感为负值 t
r
S
E感 dS Er dS 0
S
E0 0
3)求切向分量 ( E感 E )
显然违反了感生电场的基本方程,最后只留下 切向分量。
3)求切向分量 ( E感 E )
R
0r R B 与S 一致 作闭合环路L (L+,S+右旋) + t
i
1 BL (负号说明 i实与 i 相反) 2
L
d i (v B) dl L vBdl L d i vBdl lBdl
0 2 0
B
i
解:动生电动势只与运动的导 体部分有关。故可构建一 i实 L 回路0abo。 1)约定 i 右旋
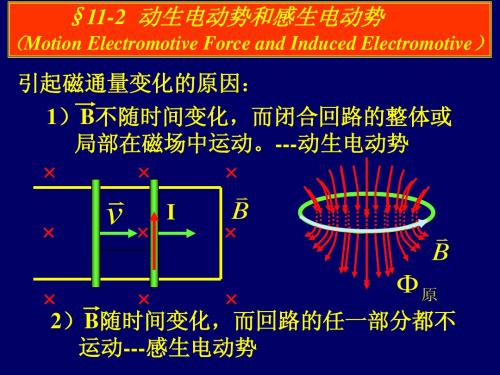
§11-2 动生电动势和感生电动势
(Motion Electromotive Force and Induced Electromotive)
引起磁通量变化的原因: 1)B不随时间变化,而闭合回路的整体或 局部在磁场中运动。---动生电动势
v
12.2 动生电动势和感生电动势
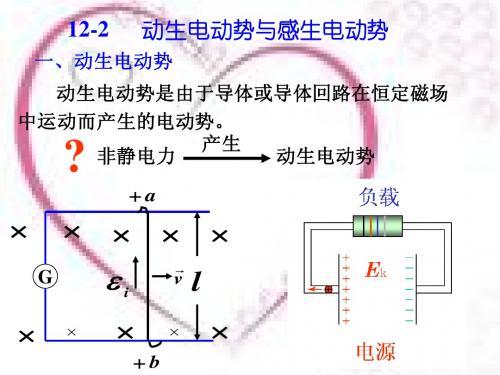
此时电荷积累停止, 两端形成稳定的电势差 两端形成稳定的电势差。 此时电荷积累停止,ab两端形成稳定的电势差。 洛仑兹力是产生动生电动势的根本原因 洛仑兹力是产生动生电动势的根本原因. 是产生动生电动势的根本原因
动生电动势的公式
非静电力
f = −e(v × B)
f 定义 Ek为非静电场强 Ek = = v ×B −e
S
A B ××× ×
ω ××v × ×
非均匀磁场
例 一直导线CD在一无限长直电流磁场中作 一直导线 在一无限长直电流磁场中作 切割磁力线运动。 切割磁力线运动。求:动生电动势。 动生电动势。 解:方法一
dε = ( v × B )⋅ dl I l dl µ0I 0 0 D sin90 dl cos180 =v C 2πl b a µ0vI dl =− 方向 D→C → 2πl µ0vI a+b dl µ0vI a + b ε =− ∫a l = − 2π ln a 2π
×××× ⊗ o ×××× B ×××× h
C
∂B ∂t
××
L
D
解:
ε i = ∫ E涡 • dl
L
r dB E涡 = 2 dt
dε = E涡 • dl r dB dl cosθ = 2 dt
h dB dl = 2 dt
⊗o
B
⊗
θ
∂B ∂t
E涡
r h
l dl
L
θ
C
D
h dB 1 dB εCD = ∫L dl = 2hL dt 2 dt
O
解:方法一 取微元
dε = ( v × B )⋅ dl
= Bvdl = Blωdl
εi = ∫ dεi = ∫0 Blωdl
动生电动势与感生电动势

【解】由于金属棒处在通电导线的非均匀磁场中,因此必
须将金属棒分成很多长度元dx,规定其方向由A指向B。这样 在每一dx处的磁场可以看作是均匀的,其磁感应强度的大小为
B 0I
2x
根据动生电动势的公式可知,dx小段上的动生电动势为
d动
(v
B)
dl
Bv
cos
dx
0I
2x
vdx
由于所有长度元上产生的动生电动势的方向都相同,所以金
d
dt
d dt
S
B
dS
又根据电动势的定义可得
L EK dl
式中,EK为感生电场的电场强度。感生电场的电场强度是 非静电性场强。
则有
L EK
dl
d dt
B dS B dS
s
s t
dB
s
S t
若闭合回路是静止的,即所包围面积S不随时间变化,即
S 0 ,则上式可写成
t
B L EK dl s t dS
性场强为
Ek
fL (e)
vB
根据电动势的定义可得,动生电动势为
a
动
L Ek
dl
(v B) dl
b
上式是动生电动势的一般表达式。由上式可知,动生电动势
的方向是非静电性场强 Ek v B 在运动导线上投影的指向。
【例9-2】如下图所示,长直导线 中通有电流I=10A,有一长l=0.1m的 金属棒AB,以v=4m·s-2的速度平行于 长直导线作匀速运动,棒离导线较近的 一端到导线的距离a=0.1m,求金属棒 中的动生电动势。
1861年,英国物理学家麦克斯韦提出感生电场的假设,认为 由于磁场变化而产生一种电场,是这个电场使导体中自由电子作 定向运动而形成电流。麦克斯韦还认为,即使没有导体,这种电 场同样存在。这种由变化磁场激发的电场称为感生电场。
动生电动势和感生电动势
动生电动势和感生电动势§6-2动生电动势和感生电动势动生电动势:回路或其一部分在磁场中的相对运动所产生的感应电动势。
感生电动势:仅由磁场的变化而产生的感应电动势。
一动生电动势图6-5动生电动势动生电动势的产生可以用洛伦兹力来解释。
长为l的导体棒与导轨构成矩形回路abcd平放在纸面内,均匀磁场b垂直纸面向里。
当导体棒ab以速度v沿导轨向右滑动时,导体棒内自由电子也以速度v随之一起向右运动。
每个自由电子受到的洛伦兹力为f=(。
e)v。
b,方向从b指向a,在其作用下自由电子向下运动。
如果导轨是导体,在回路中将形成沿着abcd逆时针方向的电流。
如果导轨是绝缘体,则洛伦兹力将使自由电子在a端累积,从而使a端带负电,b端带正电,在ab棒上产生自上而下的静电场。
当作用在自由电子上的静电力与洛伦兹力大小相等时达到平衡,ab间电压达到稳定值,b端电势比a端高。
这一段运动导体相当于一个电源,它的非静电力就是洛伦兹力。
电动势定义为单位正电荷从负极通过电源内部移到正极的过程中,非静电力k所作的功,即k。
f。
e。
v。
b.动生电动势为。
k。
dl。
a(v。
b)。
dl.b(6.4)均匀磁场情况。
若v。
b,则有。
=blv;若导体顺着磁场方向运动,v。
b,则有v。
b=0,没有动生电动势产生。
因此,可以形象地说,只有当导线切割磁感应线而运动时,才产生动生电动势。
普遍情况:在任意的恒定磁场中,一个任意形状的导线线圈l(闭合的或不闭合的)1在运动或发生形变时,各个线元dl的速度v的大小和方向都可能是不同的。
这时,在整个线圈l中产生的动生电动势为。
(v。
b)。
dl.(l)(6.5)图6-6洛伦兹力不作功洛伦兹力对电荷不作功。
洛伦兹力总是垂直于电荷的运动速度,即fv。
v,因此洛伦兹力对电荷不作功。
然而,当导体棒与导轨构成回路时会有感应电流出现,这时感应电动势却是要作功的。
感应电动势作功能量的来源。
在运动导体中的自由电子不但具有导体本身的运动速度v,而且还具有相对于导体的定向运动速度u,与此相应的洛伦兹力fu。
3.2动生电动势与感生电动势

涡旋电场
A d dΦ = d ε = ∫∫s B d S = dt (∫ A dl = ∫ t dl dt dt L) ( L)
非静电力
考虑一个固定回路L 为以L为边界的曲面,通过S 考虑一个固定回路L,S为以L为边界的曲面,通过S的 磁通量改变导致产生感应电动势
A K = t
× ×
×
υ
× × R × ×
B×
× × ×
fL
× × ×
Ek×
×
图5.12 感应加速器
为使电子在加速过程中,绕固定圆轨道运动, 为使电子在加速过程中,绕固定圆轨道运动, 以便打靶,对磁场径向分布有要求, 以便打靶,对磁场径向分布有要求,即使轨 道上的B值恰好等于轨道包围的面积内 值恰好等于轨道包围的面积内B值的 道上的 值恰好等于轨道包围的面积内 值的 平均值之半 电子被涡旋 电场加速 推导: 推导:向心运动 电子轨道处磁场
计算
eR d ( mv ) = dB 2
初始条件: ,B=0 初始条件:v=0,B=0 ,B=
对上式求积分得
eR mv = B 与 eRB R = mv 比较 2
1 BR = B 2
电子感应加速器原则上不受相对论效 应影响, 应影响,但因电子被加速时会辐射能量 而限制其能量进一步提高
l
dl
方法一:用磁通量变化率求 方法一: 方向: 方向:用楞次定律判定
Φ=∫
x+a
x
0 Ib x + a = ln 2π x
0 Ib 1 dl 2π l
0 NIb d x + a 0 NIba dNΦ ε = v = ln = dt 2π dt x 2πx( x + a ) A-B-C-D-A
感生、动生电动势
v dx
v 和 B 的夹角: θ1 = π / 2, V × B 与dx 的夹 的夹角:
二、动生电动势
r r r r r r fL r 由 f L = − e ( v × B ) 得: E k = =v×B −e + r r + r r r 代入 ε = ∫ Ek ⋅dl 得: ε = ∫ ( v × B ) ⋅d l
−
−
大小: 大小: ε =
r r − θ 1为 v与B的夹角; 的夹角;
dε i = E感dl cos θ
× × × × × × R × × × × × × × o h× × × r × θ × × ×θ B dl × L ×
r dB E感 = 由上题结果, 由上题结果,圆形区域内部的感生电场: 圆形区域内部的感生电场: 2 dt
−
ε i = ∫ dε i = ∫ E感dl cosθ
∫
L
动生电动势的求解可以采用两种方法: 动生电动势的求解可以采用两种方法:一是利用 一是利用 “动生电动势”的公式来计算; 的公式来计算;二是设法构成一种合理 的闭合回路以便于应用“法拉第电磁感应定律”求解。 求解。
三、应用动生电动势的解题方法
公式: 公式: ε
= ∫ vBdl sin θ1 cosθ 2
∫ vB dl sin θ
+
1
r r r θ 2为 v × B 与 d l 的夹角。 的夹角。
cos θ 2
方向: 方向:电动势方向从负极到正极。 电动势方向从负极到正极。 以上结论普遍成立。 以上结论普遍成立 。 如果整个回路都在磁场中运动, ,则在回路中产生的总 如果整个回路都在磁场中运动 r r r 的电动势为: 的电动势为: ε = ( v × B ) ⋅ d l
10-2动生电动势 感生电动势
O
B
A
B
O
二、感生电动势 导体不动,因为变化的磁场产生的电动势为感
生电动势.
产生感生电动势的非静电力是什么 ?(并非洛仑兹 力)如何计算感应电动势的大小? 这一问题被麦 克斯韦在1855年解决。
麦克斯韦尔假设: 变化的磁场产生感生电场(涡 旋电场),感生电场产生感应电动势。
实验证明 麦克斯韦这一假定是完全正确的。
解: i由动L 生(v电B动)势d的l 定义
L
0
B
v
l
cos
dl
B
v
sin
a
L
0
dl
vr
v B
θdal r
L
v
B
0 电动势的方向与 一致 i
特例
B
B
闭合线圈平动
直导线平动 均 匀 磁 场 闭合线圈平动
v
例2 有一半圆形金属导线在匀强磁场中作切割磁力线
运动
已知:
vr ,
v B,
R.
生动生电动势的非静电力就是洛仑兹力。
Fm
(e)v
B
单位正电荷的洛仑兹力
K
F
m
v
B
e
由 电动势K的 定dl义
动生电动势的大小
(v B) dl i
L
+B+ +P+++ + + +
+ + +
+ Fe+ +
+ + -+
+ Fm+
-
+ -
+ + +
12-2 动生电动势和感生电动势
12-2 动生电动势和感生电动势
均匀磁场
平动
一矩形导体线框, 例1 一矩形导体线框,宽为 l ,与运动导体棒构成闭合 回路。 作匀速直线运动, 回路。如果导体棒以速度 v 作匀速直线运动,求回路内 的感应电动势。 的感应电动势。 b 解:
v v v × × × × × × × × v v ε = ∫ (v × B) ⋅ dl v ×B
洛伦兹力
+ v + +b + + B v ++ + +F+ + +
e
v v v f = ( − e )v × B
平衡时
v v f v v Ek = = v×B −e v v v b v + v ε = ∫ E k ⋅ d l = ∫ (v × B ) ⋅ d l
−
a
v v v f = − Fe = − eEk
b
= ∫ vBdl
0
a l
v × × × × × × × ×
= vBl
电动势方向 a→b →
× × × × × × × × v l × × × × × × × × × × × × × × × ×
a
dl
12-2 动生电动势和感生电动势
如图,长度为l的直导线 的直导线ab在均匀磁场中以速度移 例.如图,长度为 的直导线 在均匀磁场中以速度移 直导线ab中的电动势为 中的电动势为[ 动,直导线 中的电动势为[ ] (A) Blv. . (C) Blv cosα. (B) Blv sinα. (D) 0. .
= Bvdl cos180o = −Blωdl
ω ××××
×××× ××××
动生电动势和感生电动势
Ek
1 2
B t
r
1 2
kr
2. r > R 区域
作半径为 r 的环形路径,并以逆
时针为回路绕向,则同理有
2rEk
S
B t
ds
R2k
R
o
r
r
B
1 B R2 1 R2
Ek 2 t
r
k 2r
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 9/33
随时间均匀增加, dB k dt
若铝圆盘的电导率为γ,求盘内 的感应电流。
见书P212页,例4
R
解: 取半径为r、宽为dr的圆环微 元,并以逆时针方向为正方向,则 微元环中元电动势为
d L Ek dl L Ek dl
1 kr 2r dl kr2
20
o
r
dr
B
微元环中的电阻为 dR 1 2r hdr
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 21/33
4) 电度表记录电量
电度表记录用电量,就是
利用通有交流电的铁心产生交
变的磁场,在缝隙处铝盘上产
o
生涡电流,涡电流的磁场与电
磁铁的磁场作用,表盘受到一
转动力矩,使表盘转动。
o’
Foundation - SJYGGF
感生电动势
1. 感生电动势——回路不动或不变,因磁场随时间变 化产生的电动势。相应的电流称为感生电流。
2. 感生电动势的起源——感生电场Ek 1) Maxwell感生电场(涡旋电场)假设
Maxwell 1861年首先从理论上预言感生电场的存在,后 被Hertz的电磁波实验所证实。Maxwell假设: 变化的磁场要在其周围空间激发一种电场——感生电场
§10-2. 动生电动势与感生电动势
(3)感生电场是无源场。
S
E dS 0.....( 4)
B t E
• 涡旋电场无源其电里力线是闭合曲线。 3、感生电动势的非静电力—感生电场对电 11 荷的作用力 F eE 。
4.感生电场和静电场的比较 (1)相同点:都对电荷有作用力。
不同点 产生的原因 电力线 静电场 电荷 电力线有头有尾
I B1 0 2d
B2 2 (d a)
0 I
I
1 : B DA 2 : B CB 回路中总感应电动势方向沿顺
时针.
1
d
B 2
a
15
10-11)
在金属杆上取距左边直导线为,则
I B1 0 2r
B B1 B2
图中电动势的方向:从负极a正极b;
b
(1)动生电动势的大小:
(3)式 (v B) dl 仅适用 a
a
f
v
于计算切割磁场线的导体中的感 应电动势。 (4)积分是沿着运动的导线进行的。
3
(5)若ab导体为闭合回路则动生电动势为: (v B) dl .....(1)
0…………(2)
10
(2)感生电场是非保守场。
d B l E dl dt SB d S S t d S........(10.4)
B dS 代入(2)式,得: S
n S l
• dS的正方向与l成右手螺旋关系
b
r Iv Iv dr d l sin 0 Iv sin dl 0 dr0 a 2 r r 2 r d 2 r 0 Iv d l sin ln 2 d v B:b a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动生电动势和感生电动势法拉第电磁感应定律:只要穿过回路的磁通量发生了变化,在回路中就会有感应电动势产生。
而实际上,引起磁通量变化的原因不外乎两条:其一是回路相对于磁场有运动;其二是回路在磁场中虽无相对运动,但是磁场在空间的分布是随时间变化的,我们将前一原因产生的感应电动势称为动生电动势,而后一原因产生的感应电动势称为感生电动势。
注意:动生电动势和感生电动势的名称也是一个相对的概念,因为在不同的惯性系中,对同一个电磁感应过程的理解不同: (1)设观察者甲随磁铁一起向左运动:线圈中的自由电子相对磁铁运动,受洛仑兹力作用,作为线圈中产生感应电流和感应电动势的原因。
-动生电动势。
(2)设观察者乙相对线圈静止:线圈中的自由电子静止不动,不受磁场力作用。
产生感应电流和感应电动势的原因是运动磁铁(变化磁场)在空间产生一个感应(涡旋)电场,电场力驱动使线圈中电荷定向运动形成电流。
-感生电动势一、动生电动势导体或导体回路在磁场中运动而产生的电动势称为动生电动势。
动生电动势的来源:如图,运动导体内每个电子受到方向向上的洛仑兹力为:;正负电荷积累在导体内建立电场;当时达到动态平衡,不再有宏观定向运动,则导体 ab 相当一个电源,a 为负极(低电势),b 为正极(高电势),洛仑兹力就是非静电力。
可以使用法拉第定律计算动生电动势:对于整体或局部在恒定磁场中运动的闭合回路,先求出该回路的磁通F 与t 的关系,再将对t 求导,即可求出动生电动势的大小。
(2)动生电动势的方向可由楞次定律确定。
二、感生电动势处在磁场中的静止导体回路,仅仅由磁场随时间变化而产生的感应电动势,称为感生电动势。
感生电场:变化的磁场在其周围空间激发一种电场,称之为感生电场。
而产生感生电动势的非静电场正是感生电场。
感生电动势: 回路中磁通量的变化仅由磁场变化引起,则电动势为感生电动势 .若闭合回路是静止的,它所围的面积S 也不随时间变化。
感生电场与变化磁场之间的关系:(1)变化的磁场将在其周围激发涡旋状的感生电场,电场线是一系列的闭合线。
(2)感生电场的性质不同于静电场。
静电场 感生电场 场源 正负电荷 变化的磁场力线 起源于正电荷,终止于负电荷不闭合曲线作用力法拉第电磁感应定律一、1、关于表达式tnE∆∆=φ【公式在应用时容易漏掉匝数n ,变化过程中磁场方向改变的情况容易出错,并且感应电动势E 与φ、φ∆、t∆∆φ的关系容易混淆不清。
】2、应用法拉第电磁感应定律的三种特殊情况:(1)E=Blv, (2)ω221Bl E =,(3)E=nBs ωsin θ(或E=nBs ωcos θ)二、1、φ、φ∆、t∆∆φ同v 、△v 、tv ∆∆一样都是容易混淆的物理量磁通量φ磁通量变化量φ∆磁通量变化率t∆∆φ物理 意义 磁通量越大,某时刻穿过磁场中某个面的磁感线条数越多某段时间穿过某个面的末、初磁通量的差值表述磁场中穿过某个面的磁通量变化快慢的物理量计算⊥=BS φ,12φφφ-=∆,S B ∆=∆φ或B S ∆=∆φtSB t ∆∆=∆∆φ或tBS t ∆∆=∆∆φ 注 意若穿过某个面有方向相反的磁场,则不能直接用⊥=BS φ,应考虑相反方向的磁通量相互抵消以后所剩余的磁通量开始和转过1800时平面都与磁场垂直,穿过平面的磁通量是不同的,一正一负,△φ=2 BS ,而不是零既不表示磁通量的大小,也不表示变化的多少,在φ—t 图象中用图线的斜率表示2、明确感应电动势的三种特殊情况中各公式的具体用法及应用时须注意的问题⑴导体切割磁感线产生的感应电动势E=Blv ,应用此公式时B 、l 、v 三个量必须是两两相互垂直,若不垂直应转化成相互垂直的有效分量进行计算。
将有效分量代入公式E=Blv 求解。
此公式也可计算平均感应电动势,只要将v 代入平均速度即可。
⑵导体棒以端点为轴在垂直于磁感线的匀强磁场中匀速转动,各点的线速度不同,用平均速度(中点线速度)计算,ω221Bl E=。
⑶矩形线圈在匀强磁场中,绕垂直于磁场的任意轴匀速转动产生的感应电动势何时用E=nBs ωsin θ或E=nBs ωcos θ计算。
其实这两个公式的区别是计时起点不同。
当线圈转至中性面(即线圈平面与磁场垂直的位置)时E=0,当线圈转至垂直中性面的位置(即线圈平面与磁场平行)时E=nBs ω。
这样,线圈从中性面开始计时感应电动势按E=nBs ωsin θ规律变化,线圈从垂直中性面的位置开始计时感应电动势按E=nBs ωcos θ规律变化。
用这两个公式可以求某时刻线圈的磁通量变化率△φ/△t ,。
另外,tnE∆∆=φ求的是整个闭合回路的平均感应电动势,△t →0的极限值才等于瞬时感应电动势。
当△φ均匀变化时,平均感应电动势等于瞬时感应电动势。
但三种特殊情况中的公式通常用来求感应电动势的瞬时值。
【典例】例1: 关于感应电动势,下列说法正确的是( ) 【答】CD A .穿过回路的磁通量越大,回路中的感应电动势就越大B .穿过回路的磁通量变化量越大,回路中的感应电动势就越大 C .穿过回路的磁通量变化率大,回路中的感应电动势就大D .单位时间内穿过回路的磁通量变化量大,回路中感应电动势就大 【总结】感应电动势的有无由磁通量变化量φ∆决定,φ∆≠0是回路中存在感应电动势的前提,感应电动势的大小由磁通量变化率t∆∆φ决定,t∆∆φ越大,回路中的感应电动势越大,与φ、φ∆无关。
例2:一个面积S=4×10-2m 2,匝数N=100的线圈,放在匀强磁场中,磁场方向垂直线圈平面,磁场的磁感应强度B 随时间变化规律为△B /△t=2T/s ,则穿过线圈的磁通量变化率t∆∆φ为 Wb/s ,线圈中产生的感应电动势E= V 。
【审题】磁通量的变化率t∆∆φ与匝数N 无关。
而感应电动势除与t∆∆φ有关外还与匝数N 有关。
【解析】根据磁通量变化率的定义得t∆∆φ= S △B /△t=4×10-2×2 Wb/s=8×10-2Wb/s 由E=N △φ/△t 得E=100×8×10-2V=8V【总结】计算磁通量φ=BScos θ、磁通量变化量△φ=φ2-φ1、磁通量变化率△φ/△t 时不用考虑匝数N ,但在求感应电动势时必须考虑匝数N ,即E=N △φ/△t 。
求安培力时也要考虑匝数N ,即F=NBIL ,因为通电导线越多,它们在磁场中所受安培力就越大。
例3:如图7-1所示,两条平行且足够长的金属导轨置于磁感应强度为B 的匀强磁场中,B 的方向垂直导轨平面。
两导轨间距为L ,左端接一电阻R ,其余电阻不计。
长为2L 的导体棒ab 如图所示放置, 开始时ab 棒与导轨垂直,在ab 棒绕a 点紧贴导轨滑倒的过程中,通过电阻R 的电荷量是 。
【解析】tBL t L L L B t S B t E ∆=∆-∙=∆∆=∆∆=23421222φ,tR2BL 3R E I 2∆==∴R BL t I q 232=∆=答案:RBL 232【总结】用E=N △φ/△t 求的是平均感应电动势,由平均感应电动势求闭合回路的平均电流。
而电路中通过的电荷量等于平均电流与时间的乘积,即RN t tR Nt I qφφ∆=∆∆∆=∆=,注意这个式子在不同情况下的应用。
例4:如图7-2所示,在竖直向下的匀强磁场中,将一水平放置的金属棒以水平速度V 0抛出,设整个过程中,棒的取向不变,不计空气阻力,则金属棒运动过程中产生的感应电动势的大小变化情况应是( )A .越来越大B .越来越小C .保持不变D .无法判断【解】导体切割磁感线产生的感应电动势E=Blv ,金属棒运动过程中B 、l 和v 的有效分量均不变,所以感应电动势E 不变,选C 。
例5:如图7-3所示,长为L 的金属棒ab ,绕b 端在垂直于匀强磁场的平面内以角速度ω匀速转动,磁感应强度为B ,求ab 两端的电势差。
【审题】用棒的中点的速率作为平均切割速率代入公式E=Blv 。
也可以设△t 时间ab 棒扫过的扇形面积为△S ,根据E=n △φ/△t 。
【解析】解法一:E=Blv=BL ωL/2=BL 2ω/2,解法二:E=n △φ/△t= B △S/△t=t t L B ∆∆∙/212ω= BL 2ω/2 ∴22ωBL E U ab==【总结】若用E=Blv 求E ,则必须先求出平均切割速率;若用E=n △φ/△t 求E ,则必须先求出金属棒ab 在△t 时间扫过的扇形面积,从而求出磁通量的变化率。
例6:如图7-4所示,矩形线圈abcd 共有n 匝,总电阻为R ,部分置于有理想边界的匀强磁场中,线圈平面与磁场垂直,磁感应强度大小为B 。
让线圈从图示位置开始以ab 边为轴匀速转动,角速度为ω。
若线圈ab 边长为L 1,ad 边长为L 2,在磁场外部分为2L 52,则⑴线圈从图示位置转过530时的感应电动势的大小为 。
⑵线圈从图示位置转过1800的过程中,线圈中的平均感应电流为 。
⑶若磁场没有边界,线圈从图示位置转过450时的感应电动势的大小为 ,磁通量的变化率为 。
【审题】磁场有边界时,线圈abcd 从图示位置转过530的过程中,穿过线圈的磁通量始终没有变化,所以此过程感应电动势始终为零;在线圈abcd 从图示位置转过1800的过程中,初末状态磁通量大小不变,但方向改变,所以2121L BL 56L 53BL 2=∙=φ∆。
磁场没有边界时,线圈abcd 从图示位置转动产生的感应电动势按E=nBs ωsin θ规律变化。
【解析】⑴线圈从图示位置转过530时的感应电动势的大小为零。
⑵线圈从图示位置转过1800的过程中,图图图图πωωπφ56562121L nBL L BL n t n E ==∆∆=∴R L nBL R E I πω5621==⑶若磁场没有边界,线圈从图示位置转过450时的感应电动势E=nBL 1L 2ωsin ωt=ω21L nBL 22,此时磁通量的变化率2221ωφL BL n E t ==∆∆【总结】磁通量的变化量的求法,开始和转过1800时平面都与磁场垂直,△φ=2 BS ,而不是零。
例7:一个圆形闭合线圈固定在垂直纸面的匀强磁场中,线圈平面与磁场方向垂直,如图7-5甲所示。
设垂直纸面向里的磁感应强度方向为正,垂直纸面向外的磁感应强度方向为负。
线圈中顺时针方向的感应电流为正,逆时针方向的感应电流为负。
已知圆形线圈中感应电流i 随时间变化的图象如图7-5乙所示,则线圈所在处的磁场的磁感应强度随时间变化的图象可能是( )【总结】若给出的是φ—t 图象,情况是一样的。
答案:CD 例8:如图7-6所示,金属导轨间距为d ,左端接一电阻R ,匀强磁场的磁感应强度为B ,方向垂直于平行金属导轨所在的平面,一根长金属棒与导轨成θ角放置,金属棒与导轨电阻不计。