基于双结构的汽车防抱死系统设计
汽车ABS“防抱死”系统设计
汽车ABS“防抱死”系统设计作者:黄薪蓉夏晖来源:《青年时代》2016年第29期摘要:本文对汽车制动“防抱死”系统(ABS)的工作过程和特点进行分析,完成了防抱死系统(ABS)控制的优化设计,达到了良好的制动效果,使汽车在行驶中更加安全和稳定。
关键词:汽车;ABS系统;设计随着现在现代生活水平的提高,汽车是人类生活中必不可少的交通工具。
小车的发展很快。
但是性能也是人类最担心的问题,每年大约有30万人死于车祸,其中因为制动系统故障导致的交通事故占40%。
所以汽车的制动系统在汽车中占有很重要第地位。
如何提高汽车的制动性能,提高汽车行车安全性能也是很总要的。
一、选取方案和参数控制器根据车轮转速传感器信号计算得到角减速度和角加速度比较容易,但要得到实际的滑移率,就需要用多普勒雷达或加速度传感器测定车速,这使得ABS 的结构变得复杂,成本很高。
因此,采用利用车轮转速信号和设定的一个车辆制动减速度值来计算得到参考滑移率。
门限减速度、门限加速度以及车辆制动减速度值通过试验确定.不同车型,不同的ABS一般不具有通用性。
二、控制参数的计算(一)车轮速度的求取因为数据采集的精度将极大影响控制效果。
所以提高轮速信号的采样精度就变得非常重要。
对于车速的测量,有两种方法:①直接送计算机的计数电路,从而得到轮速;有:频率法、周期法、多倍周期法、精度自适应法;②先进行A/V转换,再送计算机的周A/D转换而得到轮速。
对于轮速低频测量,周期法精度较高;对于轮速高频测量,频率法精度较高。
如果把周期法和频率法结合起来,采用轮速脉冲周期倍乘措施,可以扩展轮速测量范围,提高测量精度。
但是,由于这种方法对低频轮速脉冲信号也进行了倍乘。
所以,多倍周期法在提高高频轮速计算精度的同时,也拉长了低频轮速计算的时间间隔,从而降低了低速控制的实时性。
根据以上方法的优点和局限性,本文采用第一种方法中的精度自适应法。
多倍周期法就是把输入信号按固定的分频数进行分频,使被测周期得到倍乘。
汽车防抱死控制系统设计
武汉纺织大学毕业设计(论文)任务书课题名称:汽车悬架的建模与仿真完成期限: 2015 年01 月10 日至 2015年 05月31日学院名称机械工程与自动化专业班级学生姓名学号指导教师指导教师职称副教授学院领导小组组长签字武汉纺织大学毕业设计(论文)开题报告3目录1. 绪论 (VII)1.1 防抱死制动系统概述 (1)1.1.1 防抱死制动系统的产生 (1)1.1.2 防抱死制动系统的优点 ..............................错误!未定义书签。
1.2 防抱死制动系统的发展历史 (3)1.3 防抱死制动系统的发展趋势 (4)1.4 国内防抱死制动系统的研究和应用概况 (6)2. 汽车防抱死控制系统设计 (7)2.1 防抱死制动系统(ABS)的基本组成 (7)2.1.1 ABS的组成 (7)2.2 防抱死制动系统(ABS)的工作原理 (9)2.2.1 ABS控制原理.................... (9)2.3 ABS控制器主要硬件部分 (10)2.4 汽车车速传感器的工作原理 (15)2.5 轮速处理算法 (16)2.6 防抱死制动系统软件设计 (17)3. ABS的使用与检修 (18)3.1 ABS故障检修基础 (18)3.2 防抱死制动系统使用与检修注意事项 (19)3.3 防抱死制动系统故障自诊断20 3.4 防抱死制动系统主要部件的故障检修 (21)4. 系统软件设计 (27)5. 结束语 (30)参考文献 (31)附录I系统硬件原理图 (32)附录ⅡABS在整车上的布置 (40)附录Ⅲ系统程序...... . (41)致谢 (50)1. 绪论1.1 防抱死制动系统概述1.1.1 防抱死制动系统的产生当汽车以较高的车速在表面潮湿或有冰雪的路面上紧急制动时,很可能会出现这样一些危险的情况:车尾在制动的过程中偏离行进的方向,严重的时候会出现汽车旋转掉头,汽车失去方向稳定性,这种现象称为侧滑;另一种情况是在制动过程中驾驶员控制不了汽车的行驶方向,即汽车失去方向可操纵性,若在弯道制动,汽车会沿路边滑出或闯入对面车道,即便是直线制动,也会因为失去对方向的控制而无法避让对面的障碍物。
车辆工程毕业设计2ABS汽车防抱死制动系统设计

1 防抱死制动系统概述1.1 ABS的功能汽车ABS在高速制动时用来防止车轮抱死,ABS是英文Anti-lock Brake Syetem的缩写,全文的意思是防抱死制动系统,简称ABS。
凡驾驶过汽车的人都有这样的经历:在积水的柏油路上或在冰雪路面紧急制动时,汽车轻者会发生侧滑,严重时会掉头、甩尾,甚至产生剧烈旋转。
制动力过大,将使车轮抱死,汽车方向失去控制后,若是弯道就有可能从路边滑出或闯入对面车道,即使不是弯道也无法躲避障碍物,产生这些危险状况的原因在于汽车的车轮在制动过程中产生抱死现象,此时,车轮相对于路面的运动不再是滚动,而是滑动,路面作用在轮胎上的侧滑摩擦力和纵向制动力变得很小,路面越滑,车轮越容易。
总之,汽车制动时车轮如果抱死将产生以下不良影响:方向失去控制,出现侧滑、甩尾,甚至翻车;制动效率下降,延长了制动距离;轮胎过度磨损,产生“小平面”,甚至爆胎。
ABS防抱死制动装置就是为了防止上述缺陷的发生而研制的装置,它有以下几点好处:增加制动稳定性,防止方向失控、侧滑和甩尾;提高制动效率,缩短制动距离(松软的沙石路面除外);减少轮胎磨损,防止爆胎。
现代轿车的ABS由输入传感器、控制电脑、输出调制器及连接线等组成。
输入传感器通常包括死个车轮的轮速信号、刹车信号,个别车型还有减速度信号、手刹车或车油面信号。
ABS的第一个优点是增加了汽车制动时候的稳定性。
汽车制动时,四个轮子上的制动力是不一样的,如果汽车的前轮抱死,驾驶员就无法控制汽车的行驶方向,这是非常危险的;倘若汽车的后轮先抱死,则会出现侧滑、甩尾,甚至使汽车整个掉头等严重事故。
ABS可以防止四个轮子制动时被完全抱死,提高了汽车行驶的稳定性。
汽车生产厂家的研究数据表明,装有ABS的车辆,可使因车论侧滑引起的事故比例下降8%左右。
ABS的第二个优点是能缩短制动距离。
这是因为在同样紧急制动的情况下,ABS可以将滑移率(汽车华东距离与行驶的比)控制在20%左右,即可获得最大的纵向制动力的结果。
基于CarSim与Simulink车辆防抱死系统仿真分析
实 际 滑 移 率 处 于 最 佳 滑 移 率 附 近 '使 汽 车 在 最佳滑移率所对应的地面制动力下进行制动。
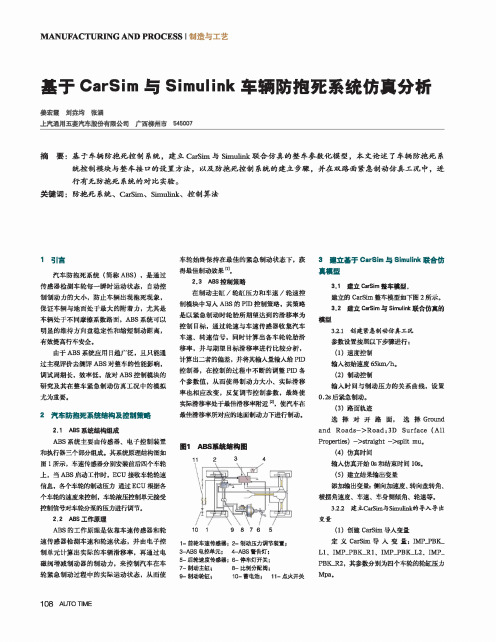
图1 ABS系统结构图
11
2
3
4
1 - 前轮车速传感器i 2 - 制动压力调节装置;
3-A B S 电控单元: 4-A B S 警告灯;
3 . 3 运 行 CarSim与 Simulink联合仿真模型
在制动主缸及轮缸压力控制模块和车速
及轮速控制模块中对ABS控制策略进行修改
并 运 行 ,如 图 3 所 示 。
4 仿真结果分析
在针对车辆防抱死制动系统测试的双路
面紧急制动测试工况下,对 于 有 无 A B S控制
车 轮 始 终 保 持 在 最 佳 的 紧 急 制 动 状 态 下 ,获
得最 佳 制 动 效 果 [1]。
2.3 ABS控制策略
在制动主缸/ 轮缸压力和车速/ 轮速控
制 模 块 中 写 入 A B S 的 P ID 控制 策 略 ,其策略
是以紧急制动时轮胎所期望达到的滑移率为
控 制 目 标 ,通 过 轮 速 与 车 速 传 感 器 收 集 汽 车
明显的维持方向盘稳定性和缩短制动距离,
有效提髙行车安全。
由 于 A B S 系统应用日趋广泛,且只能通 过主观评价去测评ABS对整车的性能影响, 调 试 周 期 长 ,效 率 低 ,故 对 A B S 控制模块的
研究及其在整车紧急制动仿真工况中的模拟
尤为重要。
2 汽车防抱死系统结构及控制策略
2.1 ABS系统结构组成 A B S 系 统 主 要 由 传 感 器 、 电子控制装置
汽车防抱死制动系统工艺设计

汽车防抱死制动系统工艺设计汽车防抱死制动系统(Anti-lock Braking System,简称ABS)是一种用于改善车辆制动性能以及防止车轮抱死的技术。
在过去几十年中,ABS已成为新车的标准配置。
本文将探讨汽车ABS的工艺设计。
汽车ABS的工艺设计主要包括系统组成、故障检测和自适应控制三个方面。
首先是系统组成。
ABS系统由多个组件组成,包括制动控制单元(ECU)、传感器、液压泵和电磁阀等。
ECU是整个系统的控制中心,通过与传感器通信获取车轮速度、转角和制动力等参数,并根据这些参数实时计算制动压力控制策略。
传感器主要用于测量车轮的转速,通常一辆车至少需要四个传感器,分别安装在每个车轮上。
液压泵负责调节制动压力,电磁阀用于控制液压泵的工作。
其次是故障检测。
ABS系统需要具备自己的故障检测机制,一旦发现故障,需要通过警告灯和声音等方式通知驾驶员。
常见的故障检测包括传感器故障、液压系统故障和控制单元故障等。
传感器故障可以通过与其他传感器进行对比检测来判断,液压系统故障可以通过检测液压泵和电磁阀的工作状况来判断,控制单元故障则需要进行自检和保护措施。
最后是自适应控制。
ABS系统的核心功能是防止车轮抱死,使车辆保持稳定,提供最佳制动效果。
在制动过程中,ECU实时计算车轮转速的变化情况,通过控制制动压力的分配,使车轮在摩擦力不小于极限附着力的条件下工作,避免汽车发生滑动和脱离控制。
自适应控制可以根据路况和制动需求调整控制策略,以提供最佳的制动性能。
在实际设计中,工艺设计人员需要考虑多个因素。
首先是系统的可靠性和稳定性,ABS是汽车安全性能的重要组成部分,因此必须确保系统正常工作。
其次是系统的性能和响应速度,ABS需要快速准确地对车轮转速进行测量和控制,以适应各种路况和制动需求。
此外,系统还需要满足成本和制造要求。
总结来说,汽车ABS的工艺设计涉及系统组成、故障检测和自适应控制等方面。
在设计过程中需要考虑可靠性、稳定性、性能和响应速度等因素,并满足成本和制造要求。
ABS汽车防抱死制动系统设计

ABS汽车防抱死制动系统设计优秀设计摘要ABS系统可以显著提高或改善汽车紧急制动时的操控性和稳定性,缩短了制动距离,是一种新型的汽车电子控制产品,并得到了越来越广泛的应用。
本文以轿车为研究对象,展开对汽车ABS的研究。
主要完成了以下的工作:通过对单个车轮时的受力分析确定了影响车轮附着系数的主要因素;通过比较电磁感应式轮速传感器和霍尔效应传感器的性能优缺点,采用并设计了霍尔效应式轮速传感器;通过对控制结构的分析设计了以INTEL公司生产的80C196KC单片机为核心的实时控制系统,包括信号输入电路、控制输出电路、驱动电路等硬件部分;经比较各种控制方案,确定了“逻辑门限制法”作为控制方案,并选用加速度和滑移率的组合作为控制参数。
采用事件门限来计算车轮的转速。
本文通过学习比较根据所学只是设计了ABS控制系统。
从理论上实现了ABS 的控制功能,完成了设计要求。
在设计过程中对汽车制动理论和制动装置有了较为深入的了解,扩大了自己的知识面,自己解决问题的能力也得到了提高。
关键词:防抱死制动系统电子控制单元门限值滑移率轮速传感器ABSTRCTAnti-lock Braking System (ABS) is an important device to improve the active safety of vehicle. ABS can greatly improve steering control ability during the brake maneuver and shorten stopping distance. Today with the improvement of the vehicle speed, ABS is applied widely.With the car as the research object, the research on ABS hasbeen carried on. And a series of work were finished:The dynamic situation of wheel was analyzed. Then, the model of hydraulic ABS was built and assured main complication affect the wheeler appendiculate coefficient.By comparing the capability of electromagnetism rotate speed sensor with Houer rotate speed sensor, we chose the later, and have designed a sensor of this kind.Via analyse the control system structure, we have designed a real-time system with the singlechip 80c196kc produced by Intel company .It comprises with signal input, singlechip system, output, drive electro circuit and otherwise parts of hardware segment.After comparing the different projects of the controllers, the method of logic rate has been comfirmed, and the combination of acceleration and slippage rate as been chose as control parameters. The time gate method to calculate the wheel rotate speed was adopted.In this paper, based on the knowledge I have mastered, I designed a ABS system and realized the control function in theory, accomplished my assignment. I have gotten a in-depth understand of motorcar trig theory and equipment. It widen my knowledge scope, improved my ability of solving problems.Kyewords: ABS electronic control slippage gate rotate speed sensor目录1 防抱死制动系统概述 (1)1.1 ABS的功能 (1)1.2 防抱死制动系统的发展历史 (2)1.3 防抱死制动系统的发展趋势 (3)1.4 国内ABS系统研究的理论状态和具有代表的ABS产品公司 (5)2.1 制动时汽车的运动 (7)2.1.1 制动时汽车受力分析 (7)2.1.2 车轮抱死时汽车运动情况 (8)2.2 滑移率定义 (10)2.3 滑移率与附着系数关系 (10)2.4 制动时车轮运动方程 (12)2.5 采用防抱死制动的必要性 (13)2.6 防抱死制动系统的基本工作原理 (14)3 防抱死制动系统硬件设计 (18)3.1 防抱死制动系统的布置形式与组成 (18) 3.1.1防抱死制动系统的布置形式 (18) 3.1.2防抱死制动系统的基本组成 (21) 3.2 80C196KC最小系统 (23)3.2.1 CPU简介 (24)3.2.2 时钟电路设计 (28)3.3 防抱死制动系统轮速传感器选择 (29) 3.3.1霍尔传感器的设计 (32)3.3.2霍尔开关电路的选择 (32)3.3.3传感器齿盘的设计 (34)3.4 防抱死制动调压系统工作过程9 (35) 3.5 电源设计 (39)3.6 信号输入电路设计 (39)3.7 电磁阀驱动电路的设计 (40)3.8 泵电机驱动电路的设计 (43)3.9 ABS系统报警LED灯设计 (44)3.10 EPROM和RAM的扩展 (45)3.11故障诊断硬件电路设计 (47)3.12硬件抗干扰设计 (48)3.13车轮制动器的选择 (52)4.1 控制方案和控制参数的选取 (55)4.2 控制参数及其计算 (56)4.2.1门限减速度的求取 (56)4.2.2门限加速度的求取 (58)4.2.3路面识别技术 (58)4.2.4车身参考速度的确定 (58)4.3 控制过程 (62)4.4 程序设计 (65)5 结论与展望 (67)5.1 研究工作总结 (67)5.2 防抱死制动系统发展方向 (67)参考文献 (70)英文翻译 (68)附录 (77)致谢 (84)1 防抱死制动系统概述1.1 ABS的功能汽车ABS在高速制动时用来防止车轮抱死,ABS是英文Anti-lock Brake Syetem的缩写,全文的意思是防抱死制动系统,简称ABS。
基于CARSIM的车辆ABS控制系统仿真研究毕业论文

基于CARSIM的车辆ABS控制系统仿真研究第1章绪论1.1 论文研究的目的和意义1.1.1研究的目的本论文的研究目的在于加强在汽车专业中对ABS的学习和认识,而本课题开发出的ABS仿真控制系统,就是学习ABS的结构、原理的良好平台。
为了学习开发质优价廉、具有自主知识产权的ABS系统,提高我国汽车的整体技术含量,提高我们汽车行业从业人员的整体水平,提高中国汽车同国外汽车的竞争力,扩大市场份额,成为一个新的经济增长点,所以,我采用CarSim软件对ABS控制系统进行仿真研究,为ABS 的生产设计打下良好基础。
1.1.2 研究的意义当今,汽车工业迅猛发展,对汽车性能的要求也越来越高,从最早对汽车动力性和越野性的要求逐渐向经济性、舒适性和安全性方向发展。
汽车安全性的研究分为两个方向:主动安全和被动安全。
主动安全是在汽车设计上尽量避免交通事故的发生,被动安全是假设交通事故已经发生,汽车在设计时应采取何措施尽量保护乘员不受伤害。
ABS属于主动安全的范畴[1],它是在制动过程中通过调节制动轮缸的压力使作用于车轮的制动力矩受到控制,将车轮的滑移率控制在较理想的范围内,充分利用了轮胎与地面的峰值附着系数和高的侧向力系数,提高制动减速度,缩短制动距离,消除汽车打滑的危险,从而保证了汽车的方向稳定性。
我们知道,在紧急情况下,驾驶员首先的本能是猛踩制动踏板,以使汽车停车。
此时如果没有装备ABS,车轮将很快抱死,即车轮不再转动,而是在路面上拖滑。
后轮抱死将使汽车失去方向稳定性,而前轮抱死则将使汽车失去转向控制.随着汽车行驶速度的显著提高和道路行密度的增大,交通事故的发生率逐年呈上升趋势,有数据统计,每年有10%左右的交通事故是由于紧急制动时汽车失稳造成的[2],所以全方位、可靠地提高汽车的主动安全性能就成为摆在汽车设计、开发及科研人员面前一项紧迫而艰巨的任务.而基于汽车轮胎与路面之间的附着性能随滑移率改变的基本原理开发的旨在改善车辆操纵性和横向稳定性的一些高技术系统,包括防抱制动系统(Anti-lock braking system,缩写为ABS )、防滑控制系统(Anti-Slip Regulation,缩写为ASR)和车辆动力学稳定性控制(Vehicle Dynamics Stability Control System,缩写为VDSC),更是受到汽车制造商的青睐和厚爱。
汽车防抱死制动系统设计

摘要防抱死制动控制系统(ABS)是在传统制动系统的基础上采用智能控制技术,在制动时自动调节制动力防止车轮抱死,充分利用道路附着力,提高制动方向稳定性和操纵稳定性,从而获得最大制动力且缩短制动距离,尽可能地避免交通事故发生的机电一体化安全装置。
本文根据防抱死制动控制系统的工作原理,应用汽车单轮运动的力学模型,分析了制动过程中的运动情况。
采用基于车轮滑移率的防抱控制理论,根据车速、轮速来计算车轮滑移率。
以MSP430F149单片机为核心,完成了输入电路、输出驱动电路及故障诊断等电路设计,阐述了ABS系统软件各功能模块的设计思想和实现方法,完成了ABS检测软件、控制软件的设计。
课题所完成的汽车防抱死制动控制系统己通过模拟试验台的基本性能试验,结果表明:汽车防抱死制动控制系统的硬件电路设计合理可行,软件所采用的控制策略正确、有效,系统运行稳定可靠,改善了汽车制动系统性能,基本能够满足汽车安全制动的需要。
本文对汽车防抱死制动系统进行了数学建模,并在Matlab/Simulink 的环境下,对汽车常规制动系统和基于 PID 控制器的防抱死制动系统的制动过程进行了仿真,通过对比分析,验证了基于PID 控制器的汽车防抱死制动系统具有良好的制动性能和方向操纵性。
关键词:防抱死制动系统(ABS);滑移率;控制策略;单片机;建模;仿真;一、电控防抱死系统分类电控防抱死制动系统(ABS)的分类1)按控制方式分可分为单参数控制和双参数控制(ABS)(1)单参数控制(ABS)它以控制车轮的角减速度为对象,控制车轮的制动力,实现防抱死制动,其结构主要由轮速传感器、控制器(电脑)及电磁阀组成。
(2)双参数控制(ABS)双参数控制的ABS,由车速传感器(测速雷达)、轮速传感器、控制装置(电脑)和执行机构组成。
其工作原理是车速传感器和轮速传感器,分别将车速和轮速信号输入电脑,由电脑计算出实际滑移率,并与理想滑移率15%—20%作比较,再通过电磁阀增减制动器的制动力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract
This paper provides the designs of a 2-CPU automotive Anti -lock Braking System,the main microprocessor MC9Sl2DP256B is responsible for the logic operation and control and the CPLD is responsible for fault diagnosis.The anti-lock brake and diagnostication can be realized with this system,and the error codes can be transmitted with CAN.
Keywords cautomotive anti-lock braking system,MC9Sl2DP256,fault diagnosis,CPLD
摘要
给出了一种双CPU 结构的汽车防抱死系统的设计!主微处理器MC9Sl2DP256B 负责逻辑运算及控制!CPLD 负责故障诊断"该系统可完成汽车防抱死制动以及故障诊断!并可采用CAN 通信传输故障码"
关键词#汽车防抱死系统!MC9Sl2DP256!故障诊断!CPLD 汽车的防抱死制动系统 ABS 是以传统气压制动系统为基础 采用电子控制技术 在制动时防止车轮抱死的一种机电一体化系统 通常由轮速传感器 控制器 ECU 和电磁阀组成 在紧急制动过程中 当驾驶员脚踏板控制的制动压力过大时 轮速传感器及控制器可以探测到车轮有抱死的倾向 此时控制器控制制动系统减小制动压力 当轮速恢复并且地面摩擦力有减小趋势时 控制器又控制制动系统增加制动压力 这样使车轮一直处于最佳的制动状态 最有效地利用地面附着力 得到最佳的制动距离和制动稳定性
1防抱死系统简介
本文以原有的四传感器四通道 4S /4M 防抱死制动系统
ABS 电子控制单元为基础 开发了一个带有故障自检的气压防抱死制动系统 设计中采用MCU+CPLD 的特殊双CPU 结构 控制CPU MCU 主要负责逻辑控制 安全CPU CPLD 主
要负责故障诊断 系统结构框图如图l 所示
图l ABS 系统结构框图
控制CPU 采集轮速信号 计算出瞬时车速 通过一定的理论算法计算出参考车速 车轮的减速度和滑移率 然后根据设定的减速度和滑移率门限值进行路面识别及制动控制 另外它还负责对轮速传感器进行静态检测 安全CPU CPLD 则主要负责ABS 系统的故障检测工作 从可能的故障点取样 与理论的状态比较 判断故障部位 并将相应的故障码传输给控制CPU 产生故障后 由控制CPU 统一对故障状态进行处理 包括中断
ABS 功能 恢复至常规制动 点亮故障显示灯 并将相应的故障代码存储在E 2PROM 中 需要时可随时通过CAN 通讯端口传
输到上位机或车上其他电子控制系统
本系统采用逻辑门限值控制方法 即将车轮的减速度(或角减速度)作为主要控制门限 而将车轮的滑移率作为辅助控制门限 实时控制作用于车轮上的制动力矩 令滑移率一直保持在理想值范围内 使车辆得到最大的制动力和较大的侧向力 从而保证稳定的制动
2系统硬件设计
系统主要由传感器信号处理电路 控制CPU 电路板数字
输入通道 CPLD 传感器静态检测电路 电磁阀驱动电路 CAN 接口电路 电源监控电路等组成
ABS 系统故障主要为电磁阀故障 轮速信号采集系统的故
障 制动管路压力信号采集系统的故障 电源故障和控制器故障 本系统针对这些故障均给出了相应的诊断电路
2.l 双CPU 的选择
本设计中主芯片采用了Motorola 公司HSCl2系列的l6位MCU MC9Sl2DP256B 该单片机使用了锁相环技术或内部倍频技术使内部总线速度大大高于时钟产生器的频率 在同样速度下所使用的时钟频率较lntel 类单片机低很多 因而高频噪声低 抗干扰能力强 更适合于汽车内部恶劣的环境 当使用
64K 的外部振荡器时内部时钟可达8M 以上 并且芯片包含定时器 A /D 转换 PWM 输出 CAN 通讯 E 2PROM 等多个模块
资源丰富 满足系统功能的开发要求
系统中的CPLD 采用XC9572TOl00 此款芯片是Xilinx 公司为满足汽车电子设备设计人员的需要 新推出的支持扩展工业温度范围的新器件之一 它不仅工作温度范围更大 从-40C
~l00C 而且还符合汽车业界特有的质量认定标准 此外 该芯片的门数和l /O 数均符合设计要求 并留有功能扩展的余地 2.2数字输入通道电路
轮速输入信号正确与否直接影响到ABS 系统的工作 为此
特地在信号处理电路之前加设数字开关 便于系统检测电路板数字输入通道 采用输入模拟法 由安全CPU CPLD 向数字通道发出一组标准方波信号输入到控制CPU 的输入捕捉端口进行测量 具体的电路如图2所示
CPLD 产生DETECT 信号控制数字开关CD4066的通断 ABS 上电自检时 DETECT 为 0 开关断开 轮速信号被屏蔽 同时CPLD 输出内部产生的标准方波 主CPU 将实际捕捉到的
脉冲进行测量与计算 经与标准波的频率比较后 如果结果一致则说明数字输入通道正常 否则说明有故障出现 检测完毕 一
基于双CPU 结构的汽车防抱死系统设计
孙
薇
汪至中北京交通大学电气工程学院$l00044%
基于双CPU 结构的汽车防抱死系统设计
!"
工业控制计算机2OO5年L8卷第7期
切正常后9DETECT变为C L U9开关接通9轮速信号经过信号整形放大单元\由CPLD输出至控制CPU O
图2电路板数字输入通道诊断电路
2.3电磁阀驱动及其故障检测电路
汽车制动系统中电磁阀的工作电流为L.5~2.5A9而微控制器的输出电流远达不到这一要求9因此采用Motorola公司的高端驱动芯片MC33289来实现电磁阀的驱动O单通道的控制电路如图3所示O通过给进气阀门(EV)\排气阀门(AV)输入电压信号进行驱动9电磁阀的控制分为下列三种情况1
L EV=O9AV=1或者EV=19AV=O时9保持车轮制动压力9 2EV=O9AV=O时9增大车轮制动压力9
3EV=19AV=1时9减小车轮制动压力O
图3单通道电磁阀驱动电路
由于MC33289的自检功能9应用时可将St管脚直接与CPU相连9一旦电磁阀出现故障9如短路或断路9St即自动置低9CPU接收到信号后立刻停止ABS功能9点亮故障显示灯9同时将相应的故障代码以中断的形式传输给控制CPU O对电磁阀阀驱动状况的检测通过比较MC33289的输出OUT与输入lN来完成O在正常情况下同一路的两个逻辑值应相等9同时为C L U或C O U9即OUTL=lNL9OUT2=lN2O若lN!OUT9则说明驱动芯片出现故障9CPU必须中断ABS功能9点亮故障显示灯并传输故障码O
2.4故障码存储及传输
MC9SL2DP256B自带4K的E2PROM空间9地址从Ox4OO 到OxFFF O无须外扩E2PROM9可用于对故障码的存储9便于数据长期保存O
擦\写操作前必须通过设置E2PROM时钟分配寄存器E-CLKDlV9将模块时钟配置在15OKHZ至2OOKHZ之间O系统中的晶振为16M9总线频率8M9经计算9取ECLKDlV=Ox4A9即预分频因子PRDlV8=19分频因子EDlV[51O]=OO1O1O9模块的时钟为182KHZ O
因为每次写操作均以字进行9所以为安全起见9擦除时每次擦两个字O擦除操作的时序与写操作完全相同9只不过相应地址写入的数据均为C O UO
此外9系统结合自身CAN模块9选用高速基础芯片MC339899设置了CAN的接口电路9便于故障码的传输O 系统中的其他电路9像传感器静态检测电路\电源监控电路等在此由于篇幅所限不作详细介绍O
!系统软件设计
带故障自检ABS系统的软件设计包括控制CPU( MC9S12DP256B与安全CPU(CPLD两部分O其中MC9S12DP256B用C和汇编语言进行开发9CPLD用VHDL 语言进行编程O
MC9S12DP256B
程序的功能是1程序存
储器及数据存储器的自
检9对轮速传感器进行
静态\动态检测9采集轮
速信号9计算出车轮速
度和减速度9根据控制
逻辑输出制动压力调节
信号9实时存储故障代
码9CAN通讯O图4是
主程序流程图O
CPLD程序的功能
是1控制数字开关
CD4O66的通断9检测
数字输入通道9监测电
磁阀驱动芯片和电磁阀
的工作状态9向控制
CPU传送故障情况O
"结束语
本系统以其独特的双CPU结构9可集防抱死制动\系统故障检测与一体9同时能实现对故障码的传输O并且采用了合理的方法人为设置故障点9对故障诊断系统与防抱死控制程序结合起来进行了试验验证O同时双CPU均预留了一定的输入输出口9为今后进一步扩展汽车电子控制装置的功能提供了可能O
参考文献
1程军.汽车防抱死制动系统的理论与实践[M].北京1北京理工大学出版社91999
2杨国田9白焰.摩托罗拉68HC12系列微控制器原理\应用与开发技术.北京1中国电力出版社92OO3
3Motorola Semiconductor Technical Data,Advance lnformation, 33289,Dual High-Side Switch,Rev2.3,O6/2OOL
!收稿日期"2OO5.4.L3#
图4控制CPU程序流程图
!"。