控制原理CHAPTER4
控制原理Chapter 3-4
2013-8-12
Chapter 3-4
6
The Concept of Stability
The concept of stability can be illustrated by a cone placed on a plane horizontal surface.
A necessary and sufficient condition for a feedback system to be stable is that all the poles of the system transfer function have negative real parts.
Bottom Line: If all the roots are in left half of s-plane: All coefficients of polynomial must have same sign All coefficients must be nonzero(besides a0.). These are necessary but not sufficient conditions for stability
2013-8-12
Chapter 3-4
2
Routh’s stability criterion
(see P176-182, Ch.91-96)
• System stability
• Routh’s stability criterion • Examples
2013-8-12
Chapter 3-4
2013-8-12 Chapter 3-4 13
Multiplying the factors together we find that
航模舵机反向控制

航模舵机反向控制Chapter 1 Introduction航模舵机是航模爱好者常用的控制设备之一,它能够实现模型飞行器的姿态控制、航向调整和航线跟踪等功能。
在实际应用中,通常需要对舵机进行反向控制,以便实现所需的运动轨迹和姿态变化。
本文将探讨航模舵机反向控制的原理和方法,旨在提供给航模爱好者和相关研究人员参考和借鉴。
Chapter 2 舵机反向控制的原理舵机的正反运动由输入信号的占空比控制,通常情况下,占空比大于50%舵机向正方向运动,占空比小于50%舵机反向运动。
而在舵机反向控制中,需要通过控制器改变输入信号的占空比,使舵机反向运动。
具体的实现方法有两种:一种是改变控制器的输出信号,另一种是改变舵机的电源线极性。
Chapter 3 舵机反向控制的方法3.1 改变控制器输出信号在舵机反向控制中,通过改变控制器的输出信号,将占空比小于50%的输入信号转化为占空比大于50%的输出信号,从而使舵机反向运动。
这种方法需要通过控制器的编程设置来实现,在控制器的程序中,将原本小于50%的输出信号映射为大于50%的输出信号,即可实现舵机反向运动。
需要注意的是,该方法仅适用于具有编程功能的控制器。
3.2 改变舵机电源线极性另一种常见的舵机反向控制方法是改变舵机的电源线极性。
通常情况下,将舵机红线接正极,黑线接负极,舵机将按照输入信号的占空比运动。
而在反向控制中,可以通过改变舵机电源线的极性,使得红线接负极,黑线接正极,从而实现舵机反向运动。
这种方法简单易行,适用于各种类型的舵机。
Chapter 4 舵机反向控制的应用舵机反向控制广泛应用于航模领域,实现模型飞行器的各种姿态调整和航线跟踪。
例如,在直升机模型的飞行中,通过反向控制舵机,可以实现模拟真实直升机的姿态变化和转向动作。
在无人机模型的飞行中,反向控制舵机可以实现自动识别目标并进行跟踪。
此外,舵机反向控制还可以应用于模拟飞机的起降和滑行过程,提高模型飞行器的控制精度和逼真度。
自动控制原理第4章 习题及解析
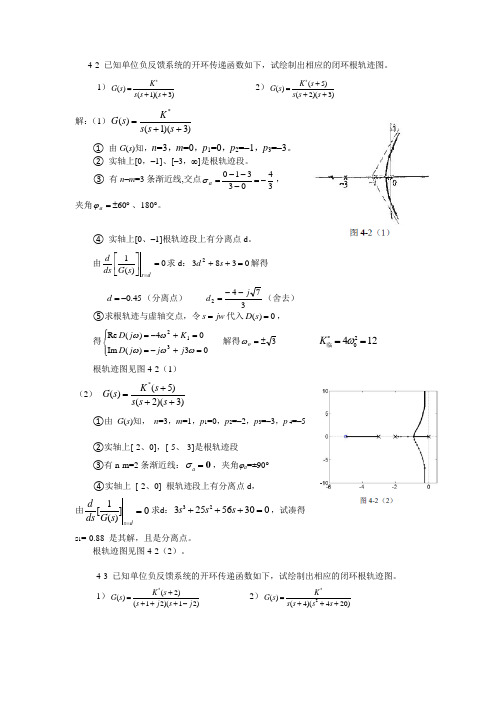
4-2 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*()(1)(3)K G s s s s =++ 2)*(5)()(2)(3)K s G s s s s +=++解:(1)()(1)(3)*K G s s s s =++① 由G (s )知,n =3,m =0,p 1=0,p 2=–1,p 3=–3。
② 实轴上[0,–1]、[–3,∞]是根轨迹段。
③ 有n –m =3条渐近线,交点3403310-=---=a σ, 夹角︒±=60a ϕ、180°。
④ 实轴上[0、–1]根轨迹段上有分离点d 。
由0)(1=⎥⎦⎤⎢⎣⎡=ds s G ds d 求d :03832=++s d 解得 45.0-=d (分离点) 3742j d --=(舍去) ⑤求根轨迹与虚轴交点,令jw s =代入0)(=s D ,得⎪⎩⎪⎨⎧=+-==+-=03)(Im 04)(Re 312ωωωωωj j j D K j D 解得3±=o ω 20412*K ω==临根轨迹图见图4-2(1)(2) *(5)()(2)(3)K s G s s s s +=++①由 G (s )知, n =3,m =1,p 1=0,p 2=–2,p 3=–3,p 4=–5②实轴上[-2、0],[-5、-3]是根轨迹段 ③有n-m=2条渐近线:0a σ=,夹角ϕa =±90°④实轴上 [-2、0] 根轨迹段上有分离点d , 由1[]0()s dd ds G s ==求d :3232556300s s s +++=,试凑得 s 1=-0.88 是其解,且是分离点。
根轨迹图见图4-2(2)。
4-3 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*(2)()(12)(12)K s G s s j s j +=+++- 2)*2()(4)(420)K G s s s s s =+++解:(1)*(2)()(12)(12)K s G s s j s j +=+++-根轨迹图见图4-3(1)(2)*2()(4)(420)K G s s s s s =+++① n =4,m =0,p 1=0,p 2=–4,p 3、4=–2±j 4② p 1、p 2连线中点正好是p 3、p 4实部,开环极点分布对称于垂线s=–2,根轨迹也将对称于该垂线。
自动控制原理(第二版)(赵四化)章 (4)
着参变量 K 趋于无穷大时,闭环极点与开环零点相重合。如果开环 零点数目 m 小于开环极点数目 n ,则可认为有 n m 个开环零点处于 s 平面上的无穷远处。因此,在 m n 情况下,当 k 时,将有 n m 个闭环极点分布在 s 平面上的无穷远出。在实际物理系统中 m n,所以闭环极点数目与开环极点数目 n 相等。这样,起始于 n 个开环极点的 n 条根轨迹,便构成了反馈系统根轨迹的全部分支。
(0 3 1
j 1 4 1
j) (2)
1
第4章 根轨迹法
4.2.5 实轴上的根轨迹 绘制根轨迹的基本原则五:在实轴上任取一点,若在其右
侧的开环实极点与开环实零点的总数为奇数,则该点所在线段 构成实轴上的根轨迹。
此结论可用相角条件方程来说明。 若开环零、极点分布如图4-4所示。在实轴上任取一点s1, 连接所有的开环零、极点。由于复数零点、复数极点都对称于 实轴,因此,复数零点、复数极点的相角大小相等,符号相反。 可见,它们对于相角条件没有影响,即复数零、极点对实轴上 的根轨迹没有影响。因此只要分析位于实轴上的开环零、极点 情况即可。由于位于s1点左侧的零、极点到s1点的向量,总是 指向坐标原点,故它们所引起的相角总为零。只有s1右侧零、 极点构成的相角才为-180°,故根据相角条件,说明只有实轴 上根轨迹区段右侧的开环零、极点数目之和为奇数时,才能满 足相角条件。
开环零点 2 ,其它三条根轨迹分支将趋向于无穷远处。
(2)确定根轨迹的渐近线
渐近线的倾斜角为
a
(2l 1)
nm
(2l 1) 180 4 1
第4章 根轨迹法
取式中的l 0,1,2 ,得:
自动控制原理第4章课后习题答案

第4章4-1 已知系统的开环传函如下,试绘制系统参数K 从0→∞时系统的根轨迹图,对特殊点要加以简单说明. (1) ()()(4)(1)(2)K s G s H s s s s +=++ (2) ()()2(4)(420)KG s H s s s s s =+++ 解:(1)有3个开环几点,1个开环零点,固有3条根轨迹分别始于0,-1,-2; 1条根轨迹终于-4,另外2条根轨迹趋于无穷远处 实轴上的根轨迹分布在-1~0之间及-4~-2之间 渐近线条数为n-m=3-1=2 渐进线的交点12041312σ++-=-=-渐近线的倾角90θ︒=±分离点22[()()]02152480d G s H s s s s ds =⇒+++= 解得: 12s =- 其它舍去求与虚轴交点:令s j ω=代入特征方程(1)(2)(4)0s s s K s ++++=中得(1)(2)(4)0j j j K j ωωωω++++= 令上式两边实部和虚部分别相等,有226430(2)0 2.83K K K ωωωω⎧=⎧-=⎪⎪⇒⎨⎨+-==±=±⎪⎪⎩⎩绘制系统根轨迹,如图4-1(1)(2)有4个开环几点,无开环零点,有4条根轨迹,分别起始于0,-4, 24j -±终于无穷远处 实轴上的根轨迹分布在-4~0之间; 渐近线条数为n-m=4-0=4 渐进线的交点04242424j j σ++++-=-=-渐近线的倾角45,135θ︒︒=±±分离点22[()()]042472800d G s H s s s s ds=⇒+++=解得: 2s =-由()()1G s H s =得21224(2)4220K=--+--⨯+, K=64绘制系统根轨迹,如图4-1(2)图4-1(1)图4-1(2)4-2 已知系统的开环传函为(2)(3)()()(1)K s s G s H s s s ++=+(1) 试绘制系统参数K 从0→∞时系统的根轨迹图,求取分离点和会和点 (2) 试证明系统的轨迹为圆的一部分解:有2个开环极点,2个开环零点,有2条根轨迹,分别起始于0,-1; 终于-2,-3;实轴上的根轨迹分布在-3~-2之间及-1~0之间分离会和点2221,2,321[()()]02401,12123(2)()()()[()()]0[2(6)4]0203602,18()()[()()]00020,d G s H s s ds KK K s G s H s s s a d G s H s s s a s a dsa a a a s KG s H s sd G s H s s ds a s s =⇒+===-+⨯-++=+=⇒+++=⇒-+≥⇒≤≥===⇒=≤≤=23s ==解得:当10.634s =-时 由()()1G s H s =得(0.6342)(0.6343)10.070.6340.6341K K -+-+=⇒=-⨯-+当2 2.366s =-时 同理 K=13.9 绘制系统根轨迹 如图4-2证明:如果用s j αβ=+代入特征方程1()()0G s H s +=中,并经整理可得到以下方程式:2233()24αβ++=(注:实部虚部相等后消K 可得)显然,这是个圆的方程式,其圆心坐标为3(,0)2-,半径为2图4-24-3 已知系统的开环传函()()(1)(3)KG s H s s s =++(1) 试绘制系统参数K 从0→∞时系统的根轨迹图(2) 为了使系统的阶跃响应呈现衰减振荡形式,试确定K 的范围 解:有2个开环极点,无开环零点,有2条根轨迹,分别起始于-1,-3; 终于无穷远处;实轴上的根轨迹分布-3~-1之间; 渐近线条数2; 渐近线的交点13022σ+-=-=- 渐近线的倾角90θ︒=± 分离会和点[()()]0240d G s H s s ds=⇒+=解:S=-2由()()1G s H s =得1,12123KK ==-+⨯-+绘制系统根轨迹图4-3由图知 当1<K<+∞时系统的响应呈现衰减振荡形式4-4 设负反馈控制系统的开环传函为2(2)()()()K s G s H s s s a +=+试分别确定使系统根轨迹有一个,两个和三个实数分离点的a 值,分别画出图形 解:求分离点2[()()]0[2(6)4]0d G s H s s s a s a ds=⇒+++=解得s=0,或分离点为实数2203602a a a ⇒-+≥⇒≤或18a ≥当a=18时 实数分离点只有s=0 如图4-4(1)当a>18时 实数分离点有三个,分别为1,2,3(6)0,4a s -+=如图4-4(2)当a=2时2()()K G s H s s =分离点[()()]00d G s H s s ds=⇒= 即分离点只有一个s=0 如图4-4(3) 当02a ≤≤分离点有一个s=0 如图4-4(4) 当a<0时 分离点有1230,s s s ===(舍去)如图4-4(5)综上所述:当a=18,0≤a ≤2时,系统有一个分离点 当a >18时,系统有三个实数分离点 当a <0时,系统有两个分离点a=18图4-4(1) a=2图4-4(2)图4-4(3) a=1图4-4(4)图4-4(5)4-65 已知系统的开环传递函数为3(1)(3)()()K S S G S H S S++=(1)绘制系统的根轨迹。
自动控制原理第4章
1.破除前向通道上多余的积分环节,使积分环节改为 惯性环节
2.改变调节器的控制规律,引入一阶微分环节,破除 积分环节。
系统的特征方程不在缺项,可以通过调节系统参数, 使其满足一定的条件,系统达到稳定。
解:当系统满足零初始条件时的输出响应为
C(t)= 2.5 - 5e-t + 2.5e-2t
零状态响应=稳态响应 + 瞬间响应
当系统不是零输入时的输出响应为
C(t)= 2.5 - 5e-t + 2.5e-2t + 3e-t - 2e-t
非零状态响应 = 零状态响应 + 零输入响应 = 稳态响应 + 瞬间响应
自动控制原理
2.劳斯判据的特殊情况
◆某行第一个元素为零,其余均不为零
例. 设系统的特征方程为
s3 - 3s 2 0 试应用判据判别实部为正的特征根的个数。
解:
s3
1
s2 0
-3 2 改变一次
s
-3 -2
s0
2
0
改变一次
有两实部为正的根。
自动控制原理
b.劳斯表某行全为零
说明特征方程中存在一些大小相等,但方向相反的根。
本章主要讨论控制系统在阶跃函数、斜坡函 数、脉冲函数等输入信号作用下的输出响应。
分析内容 ❖ 瞬态性能 ❖ 稳态性能 ❖ 稳定性
自动控制原理
4.1系统输出响应组成分析
4.1已知系统的传递函数求输出响应
G(s)=C(s3;2)
1) C(0-)= . C(0-) = 0 2) C(0-)= C(0-) = 1
自动控制原理
第四章 自动控制系统的时域分析
分析和设计控制系统的首要任务是建立系统的数
chapter4程控交换机的接口

图4-15 用户与交换网络的关系
用户模块除了实现用户接口功能之外,还包含一个 N∶1的集线器,可用来实现话务量的集中。
话务集中可由时间(T)接线器来实现,图4-16通过4个T 接线器实现了4∶1的话务集中。
图4-16 4∶1的话务集中
设一用户模块外接128 个用户。将此128个用户分为四 组,每组32个用户,分别专用于一条30/32 PCM,每个用户 各有一个专用TS,我们称这个专用TS为用户时隙。
维护与操作终端一般采用PC机,通过RS-232接口与程 控交换机的维护I/O接口连接。程控交换机的维护I/O接口提 供了维护人员访问系统软件的入口。
维护与操作终端具有OAM(运行、管理、维护)和话务服 务等功能。
OAM功能的主要目的是为维护人员提供一个有效的运行、 管理和维护交换机系统的平台。维护人员通过这个平台对相 关软件可进行增删或修改等日常维护。
A接口:速率为2048kb/s的数字中继接口 B接口:PCM二次群接口,其接口速率为8448kb/s
程控交换系统接口类型——模拟接口
Z1接口:连接单个模拟用户的接口 Z2接口:连接模拟远端集线器的接口 Z3接口:连接模拟PABX的接口
普通模拟 用户与交 换网络不 能直接怎
么办?
数字交换网络
入线
DSN
在上述过程中,完成信号传输、信号同步、 信令配合
数字中继电路的基本功能
码型变换:
单极性不归零码 时钟提取:
HDB3(高密度双极性码)
就是从输入的数据流中提取时钟信号,作为输入数据 流的基准时钟。同时该时钟信号还用来作为本端系统时 钟的外部参考时钟源。
帧同步:
就是从接收的数据流中搜索并识别到同步码,并以该 时隙作为一帧的开始,以便接收端的帧结构排列和发送 端的完全一致。
简述控制工作原理
简述控制工作原理
控制工作原理是指通过操纵和调节各种参数和变量,从而实现对系统运行状态的调控和控制能力。
控制工作原理主要分为反馈控制和前馈控制两种方式。
反馈控制是根据系统输出信号与期望输出信号之间的差异来调节输入信号,以减小误差,使系统输出稳定在期望值附近。
反馈控制系统中包含了传感器、执行器和控制器三部分。
传感器用于感知系统的输出信号,将其转换成电信号输入给控制器;控制器计算反馈差异,并根据预设的控制算法得出调节信号;执行器将控制器输出的信号转换成相应的物理动作,实际控制系统的运行。
前馈控制是根据系统输入信号及时预测其输出变化趋势,并根据预测结果提前调节输入信号,以抵消预期误差,使得系统输出更加稳定。
前馈控制系统通常包含了信号预测模型和控制器两部分。
信号预测模型利用系统的数学模型对输入信号进行预测,并得出预测误差;控制器根据预测误差来调节输入信号,以达到控制系统的要求。
不论是反馈控制还是前馈控制,其核心是控制器对输入信号进行调节和控制。
控制器可以采用不同的算法和方法,如比例控制、积分控制、微分控制等。
通过对输入信号的调节,控制器可以实现对系统的动态特性、稳定性、响应速度等方面的调控。
总之,控制工作原理是通过对系统输入信号的调节和控制,实现对系统运行状态的调控能力。
通过反馈和前馈等方式,控制
器不断监测和预测系统的状态,并根据所需控制要求进行相应的调节,以使系统输出达到期望值,并保持在稳定状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章根轨迹法4-1 根轨迹的基本概念4-2 根轨迹的绘制方法4-3 其它形式的根轨迹4-4 增加开环零极点对根轨迹的影响4-5 闭环零极点分布与系统性能指标4-1 根轨迹的基本概念根轨迹法:在已知系统开环传递函数的极点、零点分布的基础上,研究某个或某些参数变化对系统闭环特征根分布的影响的一种图解方法。
特点:是一种图解方法;利用开环极点和开环零点确定闭环极点。
1.开环零点、极点及根迹增益 )1)...(1()1)...(1()()(11++++=s T s T s s K s H s G n m ττ开环传函 控制系统方框图一般为:)1)...(1()1)...(1(......1111n m n m T s T s s s T T K ++++=ττττ)()()()(11n m p s p s z s z s k ++++= K 为系统的开环增益k 为系统开环根迹增益m i z i i ,2,1,1=-=-称为开环零点τn j T p j j ,2,1,1=-=-称为开环极点2. 闭环根与开环传递函数的关系)()(1=+s H s G 闭环特征方程为: 整理,得0)()()()(11=+++++m n z s z s k p s p s 0)()()()(111=+++++n m p s p s z s z s k 也即 , n≥m 所以:闭环特征方程 = 开环传函分母 +开环传函分子 = 0上式的解就是闭环根,闭环根也叫闭环极点。
系统的闭环传递函数为: k s s k s R s C ++=)1()()(系统特征方程为: 02=++k s s 解方程得闭环特征根:⎪⎪⎭⎪⎪⎬⎫---=-+-=k s k s 412121412121213. 根轨迹绘制举例(解析法)系统结构如图:k <1/4,为2个不等的负实根; k =1/4,为一对重实根;k >1/4,为一对共轭复根。
k 取不同值对应的闭环根 s 1,s 2 k 0 1/8 1/4 1/2 … … ∞S 1 0 -0.146 -0.5 -0.5+j0.5 … … -0.5+j∞ S 2 -1 -0.854 -0.5 -0.5-j0.5 … … -0.5-j∞k=0k=0 k=0.25 k=0.5k=0.5k=1.25k=1.25根轨迹:当系统中某个(或几个)参数从 0 到+∞变化时,系统闭环特征方程的根(即闭环极点)在根平面(S 平面)上描绘的一些轨迹。
4-2 根轨迹的绘制方法一、根轨迹方程其特征方程为: 0)()(1=+S H S G 1)()(-=S H S G 向量形式表示为: 1)()()()(-=∠S H S G S H S G ,.....)2,1,0()12(1801)()(=+︒±=-∠=∠l l s H s G 幅角条件: 设系统结构如图:11)()(=-=s H s G 幅值条件:规定:幅角以逆时针方向为正。
幅角条件及幅值条件又可写成 : k p s p s z s z s n m1......11=++++[])12(180)()()()(11+︒±=+∠+++∠-+∠+++∠l p s p s z s z s n m ⏹幅角条件是绘制根轨迹的重要依据。
⏹用幅值条件确定相应的 k 值。
说明:例4-1 设系统的开环传函为:1)利用幅角条件 -P 1 -P 3 -Z 1 -P 2 S1 26O 79O 45O ︒-=︒︒︒︒=+∠-+∠-+∠-+∠18026-79-120-45)()()()(31211111p s p s p s z s 120O解:满足幅角条件的点都是根轨迹上的点,所以)6.6)(2()4()()(+++=s s s s s H s G k 检验点s 1= -1.5+j 2.5是否在根轨迹上; 并确定与其相对应的 k 值。
2)由幅值条件求s 1相对应 的 k 值 15.126.38.56.29.246.621111=⨯⨯=++⋅+⋅=s s s s k =12.15 k二、根轨迹的绘制规则结论: 根轨迹的起点为系统的开环极点,终点 是开环零点。
若m <n ,则有n-m 条根轨 迹终止于无穷远处。
1. 根轨迹的起点和终点当k =0时, )...2,1(n j p s j =-→)...2,1(m i z s i =-→当k →∞时, σωj 起点 终点 规定:根轨迹起始于k =0的点, 终止于k →∞的点。
由幅值条件 k p s p s z s z s n m1......11=++++~开环极点~开环零点2. 根轨迹的分支数4. 实轴上的根轨迹根轨迹的分支数等于开环极点数,也等于闭环特征根的个数n 。
⏹试探点S 1满足幅角条件,是根轨迹上的点;σωj σωj S 13. 根轨迹的连续性和对称性根轨迹是连续的且以实轴为对称的曲线。
)12(180)()(11+︒±=+∠-+∠∑∑==l p s z s nj j m i i 由幅角条件: 结论:实轴上属于根轨迹的部分,其右边零、极点个数为奇数。
S 2 ⏹S 2点不满足幅角条件,所在的线段不是根轨迹的部分。
复数极、零点对实轴上的根轨迹没有影响5. 根轨迹的渐近线),2,1,0()12(180=-+±=l mn l θmn z p mi in j j----=∑∑==11)()(σ结论:如果m<n ,则当k →∞时,伸向无穷远处根轨迹的渐近线在实轴上共交于一点,其坐标是:σωj 60oσωj S 1θ1θ2 θ3 )12(180321+±=++lθθθ3)12(180+±=∴lθ当s→∞时, θθθθ===321交角为:σωj 会合点Converging pointσωj 分离点 Breakaway point (1) 重根法)]()([=dss H s G d (2) 用幅角条件∑∑===---m i nj j i p z 11011δδ一般情况下,两个极点间的根轨迹上必有一个分离点,两个零点间的根轨迹上必有一个会合点。
一个零点与一个极点之间既没有分离点也没有会合点,特殊情况下两者同时存在。
计算方法: 6. 根轨迹的分离点及会合点3.根轨迹对称实轴。
5.渐近线 6.分离点和会合点4. 实轴上的根轨迹分布 解 按照绘制根轨迹的基本规则,有 1.画出开环零、极点分布图. -1 -2-3 2. 根轨迹有两条分支。
画极点 画极点 画零点18012)12(180±=-+±=l ϕ0123)21(11=--+-=---=∑∑==mn z p nj mi ijσ分离点会合点23 =a aa a -+-=-211131例4-2 已知一系统的开环传递函数为: 试绘制根轨迹。
)2)(1()3()()(+++=s s s k s H s G 321+++=a a a k =0.172 k=5.818 k7. 根轨迹与虚轴的交点(1) 用s=jω代入求)14()510(32=---+ωωωj k 例4-3 ]6)2)[(1()()(2+++=s s s H s G k系统的特征方程为 0]6)2)[(1(1)()(12=++++=+s s ks H s G 以s =j ω代入 0]6)2)[(1(2=++++k s s 6074.314===k ωσωj -j3.74j3.74==0因此,与虚轴交点的坐标为±j 3.74(2) 用劳斯判据求将系统特征方程展开为: 0)10(14523=++++K s s s =0K = 607052=+s 74.32,1j s ±=10+K劳斯阵列表为:3s1 14 2s51s5)10(70K +-0s10+K例4-4 若一控制系统的开环传递函数为 求该系统的闭环根轨迹。
)2)(1()()(++=s s s Ks H s G 解: 1.画出开环零、极点分布图-1-2 2. 实轴上的根轨迹分布。
3. 渐近线和实轴的交点。
103210180,6003)12(180-=-++-=±=-+±=σϕ l 4. 分离点和会合点。
舍去)故可得(58.142.002630)]()([212-=-==++=s s s s ds s H s G d -0.425.根轨迹与虚轴的交点。
ks k sk ss k s s s k s s s 01232336321023)2)(1(-=+++=+++=0 k =6 0632=+s j1.414 k =6k =6-j1.414414.122,1j j s ±=±=8.复数极零点的出射角和入射角∑∑--+±=)()12(180zi pj p l θθϕωj σ1p θ2p θ1z θ∑∑--+±=)()12(180j i p z z l θθϕpϕz ϕωj σ1z θ(1)出射角The angle of locus departurefrom a pole(2)入射角The angle of locus awivalat complex zeros33.5o 63.5o135o 90o ϕ180)12()5.3390135(5.63+±=+++-=-∑∑l j i p z ϕθθ37515)5.3390135(5.63180--=++-+±=∴或ϕ例4-5 已知 ]4)2)[(5()3()()(2++++=s s s s K s H s G ,试求出射角。
)22)(22)(5()3()()(j s j s s s s K s H s G -+++++=解:系统满足n - m ≥2时,闭环极点之积可表示为:系统满足n - m ≥2时系统闭环极点之和等于开环极点之和。
9. 闭环极点之和10. 闭环极点之积)()(11∑∑==-=-nj jnj jp s 即:∏∏∏===+=mi inj jn j j z k ps 111若有极点在原点,则∏∏===mi inj jz k s11若没有开环零点,则11=∏=mi iz三、根轨迹绘制举例例4-6 某负反馈控制系统的开环传递函数为,试绘制根轨迹图。
)50)(20)(5()125.0()()(2++++=s s s s s k s H s G 5.根轨迹与虚轴的交点:ω=±8.16 , k =8.65×104。
2. 实轴上根轨迹分布。
4. 分离点和会合点。
1.画出开环零、极点分布图 3. 渐近线: -18.7, ±45°, ±135°(1)略去远离原点的极点 :分离点0 ;会合点 - 0.25 (2)求远离原点的分离点:-2.26 , -40.32)125.0()()(s s k s H s G +=)50)(20)(5()()(+++=s s s s ks H s G14111111-=+++-=---=∑∑==m n z p n j m i i jσ︒︒±±=+±=135454)12(180或lϕ1.画出开环零、极点分布图 2. 根轨迹有四条分支。