基于单片机实现的液位控制器设计
基于单片机的超声波液位控制器设计
基于单片机的超声波液位控制器设计上海师范大学信机学院毕业设计摘要课题针对液位检测的实际问题,开发了一种基于单片机的超声波液位检测仪.深入讨论了用超声波作为信号源进行液位检测的可行性及优越性,产生误差的各种原因,提出了相应的解决办法。
超声波液位检测仪以单片机 AT89C51 单片机最小系统为核心,利用超声波作为检测信号的手段,对液位进行检测和数据处理,减少了测量过程中的人工干预,方便了工作人员对液位检测的实时监控。
该系统硬件电路设计包含了超声波发射电路、接收电路、温度测量电路和液晶显示电路。
软件设计中,采用模块化程序设计思想,将软件主要分为超声波驱动与数据处理模块、功能模块两大模块。
对软件的这种“自顶向下”的模块化软件编程方法能使软件的结构清晰,有利于软件的调试和修改。
在设计中,由于需要测量的距离范围从几米到十几米,针对超声波振幅在传播时呈指数衰减的特性,最大限度地提高驱动能力,对回波进行多级放大,达到了设计要求。
由于测量精度要求很高,系统进行了温度补偿设计。
实验结果表明该设计方法可以提高超声波液位检测仪的测量精度并且硬件开销不大。
1上海师范大学信机学院毕业设计目录第一章绪论 (1)1.1 课题背景......................................................1 1.1.1 超声波液位仪的研究背景与内容 ............................... 1 1.1.2 超声波液位仪的现状 ......................................... 1 1.2 论文研究内容 ................................................. 2 1.2.1 研究内容 ................................................... 2 1.2.2 论文的章节安排 (3)第二章超声波的液位测量原理 (5)2.1 超声液位仪理论基础 (5)2.1.1 超声波介绍 ................................................. 5 2.1.2 超声波探头的结构和原理 ..................................... 5 2.1.3 T/R40-16 超声波探头 ........................................ 7 2.1.4 传感器的指向角Θ ........................................... 8 2.2 超声波液位仪工作原理 ......................................... 9 2.2.1 超声波液位仪工作原理 ....................................... 9 2.2.2 测量盲区 .................................................. 10 2.3 本章小结 (11)第三章硬件总体设计 (12)3.1 超声液位仪总体设计 .......................................... 12 3.2 单片机电路 .................................................. 14 3.2.1 复位电路设计 .............................................. 15 3.2.2 电源电路设计 .............................................. 16 3.2.3 时钟振荡器 ................................................ 17 3.3 发射电路 .................................................... 18 3.4 接收电路 (19)2上海师范大学信机学院毕业设计3.5 液晶显示电路 ................................................ 20 3.6 温度测量电路 ................................................ 21 3.7 串行通信口电路 .............................................. 23 3.8 本章小结 (25)第四章系统软件设计 (26)4.1 软件总体设计 .............................................. 26 4.1.1 软件设计流程图 ........................................... 26 4.1.2 主程序结构流程图 ......................................... 27 4.1.3 回波接收流程图 ........................................... 29 4.1.4 中断程序流程图 ........................................... 29 4.1.5 串行口通信流程图 ......................................... 30 4.1.6 DS18B20 流程图 ........................................... 31 4.2 软件程序调试 .............................................. 33 4.2.1 复位电路程序调试 ......................................... 33 4.2.2 发送和接收超声波程序调试 ................................. 34 4.2.3 显示程序调试 ............................................. 35 4.2.4 温度传感器程序调试 ....................................... 36 4.2.5 通讯子程序调试 ........................................... 38 4.3 本章小结 (39)第五章液位测量精度的提高和误差分析 (40)5.1 提高液位测量精度的主要方法 ................................. 40 5.1.1 温度测量 ................................................. 40 5.1.2 算术平均滤波 ............................................. 45 5.2 误差分析 ................................................... 47 5.3 本章小结 (48)总结 (49)3上海师范大学信机学院毕业设计第一章绪论1.1 课题背景1.1.1 超声波液位仪的研究背景与内容超声波液位仪作为一种典型的非接触测量仪器,在很多场合有广泛的应用,诸如工业自动控制,建筑工程测量和水面高度测量等方面。
基于单片机的压力液位控制系统的设计研究
3、电路设计
电路设计主要包括电源电路、传感器信号调理电路、按键与显示电路等。电 源电路为整个系统提供稳定的工作电压;传感器信号调理电路用于将传感器输出 的微弱信号进行放大和滤波,提高信号质量;按键与显示电路用于实现人机交互 功能。
4、传感器选择
压力传感器选用常见的应变片式压力传感器,具有测量精度高、稳定性好等 优点;液位传感器可选用超声波液位传感器或电容式液位传感器,根据实际需求 进行选择。
2、程序流程设计
实现系统的主程序流程,包括初始化、数据采集、控制输出、显示等步骤。 根据实际需求,可加入定时器中断、按键中断等功能。
3、数据处理与运算实现控制策 略的核心是根据采集到的压力和 液位数据
参考内容
一、引言
在现代工业生产中,液位的监控和管理是一项非常重要的任务。例如,在化 工、石油、食品等行业,液位的精确控制直接影响到生产的安全和效率。因此, 开发一种高效、精确、实时的液位监控系统至关重要。本次演示将介绍一种基于 单片机的液位监控系统,这种系统具有实时监测、数据传输、数据处理等功能, 能够满足大多数工业应用的需求。
随着技术的不断进步和应用需求的不断增长,我们有理由相信基于单片机的 液位监控系统将在未来的工业生产中发挥更加重要的作用。通过引入更多的先进 技术和算法,例如人工智能、物联网等,这种液位监控系统的性能和功能将得到 进一步的提升和拓展,以满足更加复杂和精细的生产控制需求。
四、结论
本次演示介绍了一种基于单片机的液位监控系统,该系统结合了硬件和软件 的设计方法,能够实现对液体位置的实时监测和报警控制。这种系统具有精度高、 稳定性好、操作方便等优点,能够大大提高工业生产的安全性和效率。随着技术 的不断进步和应用需求的不断增长,我们有理由相信这种基于单片机的液位监控 系统将在未来的工业生产中发挥更加重要的作用。
基于单片机的液位控制系统毕业设计

题目:基于单片机的液位控制系统设计目录摘要 (1)引言 (1)1.概述 (2)2.系统总体方案 (2)3.系统硬件设计 (3)3.189C52单片机最小系统 (3)3.2液位信号采集电路 (4)3.3显示与报警电路 (5)3.4水泵控制电路 (6)3.5直流电源电路 (7)4.系统的软件设计 (8)5.系统仿真测试 (9)6.结论 (13)参考文献 (13)附录A 总原理图 (15)附录B 系统程序 (16)致谢 (18)基于单片机的液位控制系统设计摘要:本系统以单片机AT89C52为控制核心来实现水位的基本控制功能。
该设计由液位信号采集电路、显示与报警电路、直流稳压电源电路和水泵控制电路组成。
以单片机端口输出电平控制继电器动作,实现电机的启动或停止,从而达到自动控制水位目的。
另外,系统根据设定的高度控制水位,同时具备报警提醒功能。
该系统操作方便,性能良好,进一步提高了液位控制的安全性、可靠性与实用性,降低了硬件成本。
关键词:AT89C52;信号采集;水位控制;显示与报警Design of Liquid Level Control System Based on MCU Abstract: The AT89C52 single-chip computer is used in the system as the control core to realize the basic control functions of water level. A signal acquisition circuit, a display and alarm circuit, a power supply circuit and a water pump control circuit are included in this design. When the relay is controlled by the level of the output port of the single-chip computer, the motor is set up or stopped so as to achieve the purpose of automatic water level control. In addition, according to the set of water level control system, the system is given the alarm function. The system is operated easily and has good quality, which further improves the safety , reliability and practicability of level control and the cost of hardware is also reduced.Key Words: AT89C52; Signal Acquisition; Water Level Control; Display and Alarm 引言随着微电子工业的迅速发展,单片机控制的智能型控制器广泛应用于电子产品中。
基于单片机的压力液位控制系统的设计研究

基于单片机的压力液位控制系统的设计研究一、概述压力液位控制系统是现代工业自动化领域中不可或缺的一部分,广泛应用于各种工业过程控制中。
基于单片机的压力液位控制系统以其低成本、高性能和易于集成等优点,受到了广泛关注和应用。
本设计研究旨在探讨基于单片机的压力液位控制系统的设计与实现方法。
通过深入研究压力液位控制的原理和技术,结合单片机的特性,设计出一套高效、稳定的控制系统。
该系统能够实时监测液位的变化,并根据设定的压力阈值自动调节液位,保证工业过程的顺利进行。
本研究将详细介绍系统的硬件组成和软件设计,包括单片机的选型、传感器的选择与校准、控制算法的设计与实施等。
同时,还将探讨系统在实际应用中的性能表现和优化方法,为相关领域的研究和应用提供参考和借鉴。
通过本设计研究,我们期望能够为基于单片机的压力液位控制系统的设计和应用提供有益的指导,推动工业自动化技术的发展和应用。
1. 背景介绍:阐述压力液位控制系统在工业生产和日常生活中的重要性。
压力液位控制系统在现代工业生产和日常生活中扮演着至关重要的角色。
在工业领域,无论是化工、石油、制药还是食品加工等行业,都需要对液体或气体的压力、液位进行精确控制,以确保生产过程的稳定性和安全性。
例如,在化工生产中,对反应釜内的压力和液位进行精确控制,可以确保化学反应的顺利进行,避免安全事故的发生。
在石油行业中,通过控制储罐的液位,可以确保油品的储存和运输安全。
在日常生活中,压力液位控制系统同样具有广泛的应用。
例如,家庭用水系统中,通过控制水泵的工作状态,可以确保家庭用水的水压稳定在楼宇自动化系统中,对供水系统的压力和液位进行智能控制,可以提高供水效率,降低能耗。
压力液位控制系统还在农业灌溉、环保监测等领域发挥着重要作用。
传统的压力液位控制系统大多采用复杂的电路和机械结构,不仅维护成本高,而且难以适应现代工业自动化和智能化的需求。
研究基于单片机的压力液位控制系统具有重要意义。
(完整word版)基于单片机液位控制的设计

单片机原理与应用课程设计报告题目:基于单片机的液位控制器设计学院: xxxxxxxxxxxxxxxxxx 班级: xxxxxxxxxxxx 学号: xxxxxx 姓名: xxx 联系方式: xxxxxxxx 指导教师: xxxxxxxxxx 报告成绩:xx年xx月xx日目录1 绪论 (5)2 系统总体设计 (6)2.1设计思路 (6)2.2 系统框图 (6)2.3 设计原理分析 (7)2.4 电路工作原理................................................................................................错误!未定义书签。
3 系统硬件设计 (9)3.1 驱动电路设计 (9)3.2 报警电路设计 (9)3.3液位指示电路设计............................. 错误!未定义书签。
3.4压力自动控制模拟和手动操作控制电路设计 ..... 错误!未定义书签。
3.5晶振电路..................................... 错误!未定义书签。
3.6 复位电路 (14)4 系统软件设计 (15)4.1 软件设计说明 (15)4.2主程序流程图 (15)4.3液位控制程序流程图 (15)5 设计的结果 (18)6 总结............................................. 错误!未定义书签。
附录................................................ 错误!未定义书签。
摘要该设计是由单片机AT89C51控制的锅炉水位控制器,它主要有硬件和软件部分共同完成控制系统功能。
其中硬件部分主要由水位检测电路、驱动电路、夜位指示电路以及压力自动控制模拟和手动控制等部分组成;软件部分主要由汇编语言所编写的程序组成。
基于单片机的液位控制系统(本科毕业设计)

摘要二十一世纪是高科技时代,科技正在发展,一些传统的测控方式也会随着科技的发展而改革更新。
现代的工业、农业的生产中不仅要求液位控制系统更精准,更稳定,还要求其更新自动化程度快和性价比高。
基于单片机的液位控制系统具有测量精准度高、性能稳定可靠、能量消耗低而使用寿命较长的特点,将科学与液位测量相结合,而达到合理调配资源,降低能源消耗的目的。
超声波能在不同媒质中传播,且方向性强,传播距离远,消耗能量缓慢,碰到障碍物会产生反射,形成反射回波。
所以超声波常常被用于测量距离。
本设计采用超声波模块测量液面的高度,并把数据传送给AT89C51单片机。
单片机处理数据信息后判断是否开启水泵抽水来实现水位的基本控制功能。
本系统由LCD1602显示器、键盘、传感器、电源和水泵组成。
关键词:单片机;超声波;LCD1602;传感器Abstract21st century is the era of high technology, technology is being developed, some of the traditional measures will be updated with the development and reform of science and technology. Modern industry and agriculture requires not only a more intuition and stable performance, but also fast update automation and high cost-effective with the cost in reducing production equipment requirements. Liquid level control system based on microcontroller with its high control accuracy, reliable performance, low energy consumption and long working life set to be applied to the liquid level system characteristics of the control. Combine science with liquid level measurement to achieve a reasonable allocation of resources and reduce the purpose of energy consumption.Ultrasonic propagation in different media, and strong direction, transmission distance, slow energy, obstacles will produce reflection to form echo. Ultrasound is often used to measure distance. This design uses ultrasonic to measure the height of liquid level, then sent the data to AT89C51 microcontroller. Microcontroller determines whether to open the pump after processing the data from ultrasonic wave distance measurement module to achieve the basic level control.The system consists of LCD1602 monitor, keyboard, sensors, power supply and water pump.Keywords: AT89C51 Ultrasonic wave LCD1602 sensor目录1 绪论 (1)1.1选题的背景和意义 (1)1.2国内外发展形势 (1)1.3本系统主要完成的任务 (2)2 系统硬件设计 (3)2.1 系统硬件结构 (3)2.2 AT89C51单片机模块 (3)2.3 超声波测距模块 (5)2.3.1超声波简介 (5)2.3.2 HC-SR04超声波传感器 (6)2.3.3 HC-SR04超声波传感器测距原理 (7)2.3.4 HC-SRO4超声波模块电路图 (8)2.4 LCD1602显示模块 (8)2.4.1 LCD1602显示器介绍 (8)2.4.2 1602LCD指令说明及其时序 (10)2.5 电源模块 (11)2.6 按键模块 (11)2.7 报警模块 (12)2.8 抽水系统模块 (13)2.9 整体电路图 (13)3 系统软件设计 (17)3.1 系统工作原理 (17)3.2 主程序流程图 (17)3.3 超声波测距模块设计 (18)3.3 按键模块设计 (20)3.4报警模块设计 (20)4 软件制作与调试 (22)4.1 软件制作 (22)4.2 软件调试 (22)5 硬件制作与调试 (24)5.1 硬件制作 (24)5.2 硬件调试 (24)总结 (28)致谢 (29)参考文献 (30)1 绪论1.1选题的背景和意义二十一世纪是高科技时代,科技正在发展,一些传统的测控方式也会随着科技的发展而改革更新。
基于单片机的液位控制器的设计

课题背景与研究意义
单片机控制的智能型控制器可应用于高层 小区水塔水位控制,污水处理设备和有毒、 腐蚀性液体液位控制。 进行液位控制的方式有很多。简单的机械 控制:结构简单成本低,但精度不高,不 能进行数值显示。
本次设计的目的
此次系统设计的模型为水箱供水,利用单 片机为控制核心,设计一个对液位进行监 控的系统,要求实时检测液位高度,并与 预设值作比较,由单片机控制继电器的开 断进行液位的调整,最终达到液位的预设 值。现场实时显示检测值。
调控模块
此调控电路设计了三个按键分别与单片机 的P32、P31、P30端口连接。
LCD1602液晶显示器
继电器电路设计
报警装置
蜂鸣器电路
系统仿真图
系统仿真图
系统仿真图
仿真结果分析
实际水位 测量水位 蜂鸣器 LED灯 水泵
5.1 8.3 13.5
5 8 14
响 不响 不响
亮 暗 暗
工作 停止 停止
上限14,下限7(cm)。实物图ຫໍສະໝຸດ 系统结构图硬件部分介绍
STC89C52:功耗低,开发性、控制功能强大 压力传感器 ADC0832 调控模块:按键和红外遥控 LCD1602 水泵 报警模块
单片机最小系统电路设计
ADC0832模块
压力传感器及采集原理图
调控模块
红外接收头 (VS1838B) 红外模块原理图
基于STC89C52单片机的液位控制系统设计
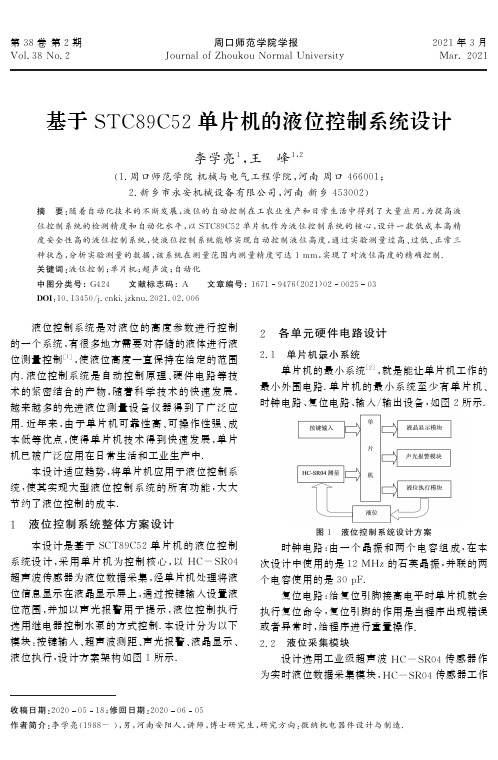
第38卷第2期周口师范学院学报2021年3月V o l.38N o.2J o u r n a l o f Z h o u k o u N o r m a l U n i v e r s i t y M a r.2021基于S T C89C52单片机的液位控制系统设计李学亮1,王峰1,2(1.周口师范学院机械与电气工程学院,河南周口466001;2.新乡市永安机械设备有限公司,河南新乡453002)摘要:随着自动化技术的不断发展,液位的自动控制在工农业生产和日常生活中得到了大量应用,为提高液位控制系统的检测精度和自动化水平,以S T C89C52单片机作为液位控制系统的核心,设计一款低成本高精度安全性高的液位控制系统,使液位控制系统能够实现自动控制液位高度,通过实验测量过高㊁过低㊁正常三种状态,分析实验测量的数据,该系统在测量范围内测量精度可达1mm,实现了对液位高度的精确控制.关键词:液位控制;单片机;超声波;自动化中图分类号:G424文献标志码:A 文章编号:16719476(2021)02002503D O I:10.13450/j.c n k i.j z k n u.2021.02.006液位控制系统是对液位的高度参数进行控制的一个系统,有很多地方需要对存储的液体进行液位测量控制[1],使液位高度一直保持在给定的范围内.液位控制系统是自动控制原理㊁硬件电路等技术的紧密结合的产物,随着科学技术的快速发展,越来越多的先进液位测量设备仪器得到了广泛应用.近年来,由于单片机可靠性高㊁可操作性强㊁成本低等优点,使得单片机技术得到快速发展,单片机已被广泛应用在日常生活和工业生产中.本设计适应趋势,将单片机应用于液位控制系统,使其实现大型液位控制系统的所有功能,大大节约了液位控制的成本.1液位控制系统整体方案设计本设计是基于S C T89C52单片机的液位控制系统设计,采用单片机为控制核心,以H C-S R04超声波传感器为液位数据采集,经单片机处理将液位信息显示在液晶显示屏上,通过按键输入设置液位范围,并加以声光报警用于提示,液位控制执行选用继电器控制水泵的方式控制.本设计分为以下模块:按键输入㊁超声波测距㊁声光报警㊁液晶显示㊁液位执行,设计方案架构如图1所示.2各单元硬件电路设计2.1单片机最小系统单片机的最小系统[2],就是能让单片机工作的最小外围电路.单片机的最小系统至少有单片机㊁时钟电路㊁复位电路㊁输入/输出设备,如图2所示.图1液位控制系统设计方案时钟电路:由一个晶振和两个电容组成,在本次设计中使用的是12MH z的石英晶振,并联的两个电容使用的是30p F.复位电路:给复位引脚接高电平时单片机就会执行复位命令,复位引脚的作用是当程序出现错误或者异常时,给程序进行重置操作.2.2液位采集模块设计选用工业级超声波H C-S R04传感器作为实时液位数据采集模块,H C-S R04传感器工作收稿日期:20200518;修回日期:20200605作者简介:李学亮(1988-),男,河南安阳人,讲师,博士研究生,研究方向:微纳机电器件设计与制造.原理采用I O触发测距,触发信号输入端输入一个10微秒以上的高电平信号,超声波发送口收到信号自动发送8个40H z方波,同时启动定时器,待传感器接收到回波启动定时器停止计时并输出回响信号,回响信号脉冲宽度与所测量距离成正比.根据时间间隔t和声速V计算出传感器到液面距离S1,再根据容器高度减去所计算出的距离得出液面高度S.如下公式,测量图如图3所示.S1=v*t/2(1) S=C-S1(2)图2单片机的最小系统图3超声波液位测量示意图2.3 L C D1602液晶显示模块L C D1602是一种工业字符型液晶显示屏,不能显示汉字,只能显示字母㊁符号和数字,本次设计显示选用L C D1602液晶屏可以很好地显示字符数字,目前已经广泛应用于日常生活成产中.本设计需要显示的数据有三个数据,液位高度上限(H)㊁液位高度下限(L)㊁实时液位高度(S).2.4报警电路本系统选用指示灯报警和蜂鸣器报警双重声光报警电路.蜂鸣器报警选用电磁式有源蜂鸣器,其额定电流20m A,额定电压5V,频率为2300ʃ300H z,输出音压ȡ85d B,由于单片机带载能力不强,所以蜂鸣器5V供电采用直接电源供电,设计接入S8550三极管Q1控制,正极连接S8550第3引脚, S8550第2引脚经电阻接单片机P1.0引脚控制, S8550第1引脚接电源+5V,液位在正常范围时P1.0输出1,三极管Q1截至不导通,当液位高度不在正常范围时,P1.0输出0,Q1导通,蜂鸣器接入5V,蜂鸣器报警,蜂鸣器声音周期长短可以通过延时指令来控制.指示灯报警选用三色灯报警,当超声波检测实时液位高度高于设置上限时,红色报警灯闪烁,当液位高度在设置范围内时,绿色指示灯常亮,当液位高度低于设置下限时,黄色报警灯闪烁,如图4所示.图4声光报警电路图2.5按键输入模块按键输入模块共设计了三个按键,功能是设置液位高度范围,如图5所示.K e y S e t:设置选择; K e y I N C:递加;K e y D E C:递减.图5按键设置电路图2.6液位执行控制模块液位执行控制模块[3]主要有继电器控制,其主要分为两部分:进水继电器控制模块㊁排水继电器控制模块.与蜂鸣器报警模块相似,都通过S8550三极管连接单片机,正常情况下单片机一直输出高电平.当容器内液位高度低于设置的下限时,单片机对应端口输出低电平,Q2导通,进水继电器得电,进水泵接通启动给容器注水,直到容器内液位高度高于设置下限时,对应端口输出高电平,Q2截止,进水继电器失电,进水泵停止;当容器内液位高度高于设置上限时,单片机对应端口输出低电平, Q3导通,排水继电器得电,排水泵接通启动给容器排水,直到容器内液位高度低于设置上限时,对应端口输出高电平,Q3截止,排水继电器失电,排水泵停止.液位继电器控制模块的设计如图6所示.62周口师范学院学报2021年3月设计总体硬件电路P C B 电路板通过A D 15软件画出系统硬件电路原理图如图7所示.图6 液位控制模块3 系统程序设计液位控制程序设计主要控制超声波的发射和接收,测量传播时间,根据超声波传播时间和超声波传播的速度计算得出与被测物体之间的高度,然后通过容器高度减去测量高度得出实际液位高度,并将得到的数据显示在1602液晶显示屏上,并使单片机根据设置范围发出报警液位控制指令,从而实现液位的自动控制.系统程序采用C 语言编写,通过K e i l 编译完成,软件程序设计的流程图如图8所示.图7硬件电路原理图图8 程序流程图4 系统测试与结果分析液位控制系统在电路板焊接完成后通电屏幕点亮正常,通过按键输入设置液位的上下限范围进行测试,在液位正常范围和过高过低范围时系统工作正常,在上下限临界点时由于进出管内存有一定的液体,由于没有节流阀液体回流,导致液位控制一直处于启停状态,通过调节液位传感器的采集频率[3],并修改程序通过多次采集液位对比分析从而确定当前液位高度,从而提高液位高度的精准性,经反复测试,选择最适合的采集频率,使得液位控制系统在传感器测量范围内达到了1mm 的高精度.5 结束语本次设计以S T C 89C 52单片机为液位控制核心,利用超声波传感器作为液位采集模块,通过K e i l 软件编写C 语言控制程序,通过A D 15软件制作硬件原理图,根据原理图在万能板上完成硬件设计制作,通过I S P 将程序下载到单片机里,然后进行系统调试最终完成调试.液位控制系统包括超声波液位采集模块㊁声光报警模块㊁液位显示模块㊁按键输入模块㊁液位执行控模块等五大模块.本设计达到了精准性高㊁成本性低㊁安全性高的理想设计目标.参考文献:[1]张凤兰.液位测量与监控系统设计[D ].北京:北方工业大学,2010.[2]张毅刚,彭喜元,董继成.单片机原理及应用[M ].北京:高等教育出版社,2003.[3]钟晓强.基于单片机实现的液位控制器设计[J ].现代电子技术,2009,32(2):51-53.[4]卢伟,王杨,赵红东,等.高精度超声波液位测量系统的设计与实现[J ].仪表技术与传感器,2013(7):46-48.(责任编辑 闫建军)72第38卷第2期李学亮,等:基于S T C 89C 52单片机的液位控制系统设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机实现的液位控制器设计姓名:陈红钊学号:0901*******摘要本文介绍一种基于单片机实现的液位控制器的设计方法,该控制器以单片机为核心,设计出了PID控制系统,并通过外围硬件电路来达到实现控制的目的。
可根据需要设定液位控制高度,同时具备报警、高度显示等功能,由于增加了气体压力传感器,使其具有与液面不接触的特点,可用于有毒、腐蚀性液体液位的控制,具有较高的研究价值。
该控制器不仅可用于学校进行教学研究,还可用于生产实际,是目前比较缺少的一种产品。
关键词:传感器;A/D转换;PID控制器;外围硬件电路一.引言随着微电子工业的迅速发展,单片机控制的智能型控制器广泛应用于电子产品中,为了使学生对单片机控制的智能型控制器有较深的了解。
经过综合分析选择了由单片机控制的智能型液位控制器作为研究项目,通过训练充分激发学生分析问题、解决问题和综合应用所学知识的潜能。
另外,液位控制在高层小区水塔水位控制,污水处理设备和有毒,腐蚀性液体液位控制中也被广泛应用。
通过对模型的设计可很好的延伸到具体应用案例中。
工业液体的液位控制系统是工业生产中比较典型的控制应用之一,许多控制系统的模型与此类似。
以往在该领域比较成熟的控制算法是PID算法。
由于过程控制系统执行机构的复杂性、变量间的关联性和非线性等原因,找到一组适合整个系统大范围控制的合适的PID 参数相当困难,这对要求控制范围宽、响应快且连续可调系统就显得力不从心了。
另外液位控制对象一般具有纯滞后、大惯性,因此液位变化缓慢,系统一般呈非线性[2]。
用常规PID控制器来控制时,其效果不理想,系统响应的调节时间较长。
模糊控制与PID控制相结合则显示了巨大的优越性。
模糊PID控制器既具有模糊控制灵活且适应性强的优点,又具有常规PID 控制精度高的特点,在工业控制中得到广泛应用。
二. 系统设计方案比较说明对于液位进行控制的方式有很多,而应用较多的主要有2种,一种是简单的机械式控制装置控制,一种是复杂的控制器控制方式。
两种方式的实现如下:(1) 简单的机械式控制方式。
其常用形式有浮标式、电极式等,这种控制形式的优点是结构简单,成本低廉。
存在问题是精度不高,不能进行数值显示,另外很容易引起误动作,且只能单独控制,与计算机进行通信较难实现。
(2) 复杂控制器控制方式。
这种控制方式是通过安装在水泵出口管道上的压力传感器,把出口压力变成标准工业电信号的模拟信号,经过前置放大、多路切换、A/D变换成数字信号传送到单片机,经单片机运算和给定参量的比较,进行PID运算,得出调节参量;经由D /A变换给调压/变频调速装置输入给定端,控制其输出电压变化,来调节电机转速,以达到控制水箱液位的目的。
针对上述2种控制方式,以及设计需达到的性能要求,这里选择第二种控制方式。
最终形成的方案是,利用单片机为控制核心,设计一个对供水箱水位进行监控的系统。
根据监控对象的特征,要求实时检测水箱的液位高度,并与开始预设定值做比较,由单片机控制固态继电器的开断进行液位的调整,最终达到液位的预设定值。
检测值若高于上限设定值时,要求报警,断开继电器,控制水泵停止上水;检测值若低于下限设定值,要求报警,开启继电器,控制水泵开始上水。
现场实时显示测量值,从而实现对水箱液位的监控。
三.水箱液位系统建模图1为过程控制实验室的液位过程控制系统的原理图。
A为液罐的截面面积, h为液位高度, h0为实际液位高度, Qo为系统输出流量, Qi为系统输入流量。
利用水泵将储水槽中的水输出,通过电动调节阀调节进水流量,采用闭环串级控制上、下水箱的液位,使水箱液位保持恒定,液位变送器对上、下水箱液位进行实时测量。
图3.1 水箱液位控制图根据质量守恒定律:假定阀的开度为x(t)当阀全开时,单位时间流过阀的液量为则根据流体学有式(3)中m是罐装阀的结构决定的系数,对于固定阀m值不变,将式(2)、(3)代入式(1)中有用泰勒公式线性式(3)化为经过拉氏变换得到系统的传递函数为在工程应用中121HA因此系统的控制模型为考虑到调节阀与实际水箱的入口有一段距离,滞后时间t=l/v,故数学模型写为这样就将该系统的过程数学模型的结构确定了,是含纯滞后的一阶惯性环节,也是控制系统中比较典型的结构。
四. 系统硬件和软件的实现4.1 PID控制4.1.1 PID控制原理在模拟控制系统中,控制器最常用的控制规律是PID控制。
常规PID控制系统原理框图如图4.1所示。
系统由模拟PID控制器和被控对象组成。
图4.1 模拟PID控制系统原理框图PID 控制器是一种线性控制器,它根据给定值r(t)与实际输出值y(t)构成控制偏差:将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,故称PID 控制器。
其控制规律为或写成传递函数形式式中p k ——比例系数;i T ——积分时间常数;d T ——微分时间常数;简单说来,PID 控制器各校正环节的作用如下:1.比例环节即时成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,使被控制量朝着减小误差的方向变化,控制作用的强弱取决于比例控制系数。
比例控制的缺点是对于具有自平衡性的被控对象存在静差。
如果将系数调整过大来减少静差会导致动态性能变坏,甚至会使闭环系统不稳定。
2.积分环节积分控制的作用是,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。
因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。
积分作用太强会使系统超调加大,甚至使系统出现振荡。
积分作用具有滞后特性,积分控制作用太强会使控制的动态性能变差,以至于使系统不稳定。
积分作用的强弱取决于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。
3.微分环节能反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
对误差进行微分,并能在偏差比例控制能迅速反应误差,从而减小稳态误差。
微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。
应用PID 控制,必须适当地调整比例放大系数p k ,积分时间i T 和微分时间d T ,使整个控制系统得到良好的性能。
4.1.2 模糊PID控制模糊控制器都是以系统误差E和误差变化EC为输入语句变量,因此它具有类似于常规PD控制器的作用,采用该类模糊控制器的系统有可能获得良好的动态特性,而静态性能不能令人满意,无法消除静态误差。
由线性控制理论可知,积分控制作用能消除稳态误差,但动态响应效果不是很好,比例控制作用动态响应快,而比例积分控制作用既能获得较高的稳态精度,又能具有较高的动态响应。
因此,把PID控制策略引入模糊控制器,构成模糊PID控制,是改善模糊控制器稳态性能的一种途径。
水位控制具有纯滞后和容量滞后的现象,水位上升时间长且并不是等速的。
由于上升时间长,如果积分参数过小,容易形成大的静差,而积分常数过大又容易引起大的超调及振荡;的比例增益不利于系统的上升作用,但大的比例增益又会造成震荡频率、振幅很大,使其抗干扰能力很弱,稳定性很差。
为此,设计了一种模糊自调整PID控制器,在整个控制过程中,根据PID三个参数对系统不同阶段控制的要求,随时调整各参数。
使用PID主要是基于系统的误差,但由于它的控制性能依赖于PID控器的三个参数以及系统数学模型的精确性,且其控制参数对系统的参数变比较敏感,对于非线性系统,传统的PID控制的自适应性、鲁棒性等性能往不能满足系统性能要求。
模糊控制由于具有算法简单、易于掌握,且无知道被控对象的精确模型,具有较好动态特性,以语言描述人类知识,把表示为模糊规则或关系,具有推理、利用知识库,把知识与状态相结合起决定控制行为等优点,已经得到了广泛地应用。
与PID结合可以运用人类识、具有推理功能,可以改变PID的参数,使PID系统具有较强自适应性模糊PID控制器是将模糊控制与常规PID控制相结合的产物。
它吸收了模控制和常规PID控制的优点模糊参数自整定PID控制利用模糊控制方法将操作人员的调整经验作知识存入计算机中,根据现场实际情况,计算机能自动调整PID参数。
这控制器把古典的PID控制与先进的专家系统相结合,只需将操作人员(专长期实践积累的经验知识用控制规则模型化,然后运用推理便可对PID参实现最佳调整。
研究表明,模糊PID不仅可以解决简单线性系统的控制问题,而且于许多复杂非线性、高阶、时延等系统具有很好的效果。
模糊PID控制实际上是一种变增益或自调节PID。
4.1.3 模糊控制器的设计设理想的液位为h0,实际测得的水位高度为h,选择液位差为e=Δh=h0-h。
将偏差e作为观测值,将偏差和偏差变化率分别记为E与Ec,其论域均取为[-3-2-10123],ΔKP、ΔKI、ΔKD模糊论域取[-2-1012],E与Ec的模糊子集记为[NBNM NS ZO PSPM PB],分别表示负大、负中、负小、零、正小、正中、正大。
隶属度函数形状均选三角形,如图4.2所示。
PID参数模糊自整定是找出PID 3个参数与E和Ec模糊关系。
在运行中不断检测E和Ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同的E和Ec时对控制参数的要求,使系统具有较好的静动态性能的要求。
针对不同的e和Δe,总结出了一套KP、KI与KD整定方法。
图4.2E 、c E 与P K 、I K 、D K 模糊子集(1) 当|e|较大时,为加快响应速度应取较大的KP,同时为了避免e 的瞬间变化可能出现的微 分饱和超出控制范围应取较小KP 。
为避免出现较大的超调,对积分作用加以限制,取KI=0。
(2)当|e|和|Δe|中等时,为使系统具有较小的超调, KP 应取得小些。
此时KD 的取值对系统的影响较大应取适中一些的取值要适当。
(3)当|e|较小时,为使系统具有较好的稳定性能,应取较大的KP 和KI, KD 的取值要恰当,以避免在平衡点附近出现振荡。
同时为避免系统在设定值附件振荡,|Δe|较大时KP 可取小一些。
根据3个参数之间的相互作用关系及控制规律,建立了合适的模糊控制规律表。
如表1、2、3所示。
模糊推理采用if …then 合成规则, if e is NB and ec is NB then P K is NB I K is PBKD is NS…if e is PB and ec is PB then P K is ZO I K is ZO D K is PB,共49条规则。
根据偏差与偏差变化率得出相应的ΔP K 、ΔI K 、ΔD K ,再乘以相应得量化因子,从而得出PID 实时参数P K 、I K 、D K 。