结构力学第7章位移法
结构力学位移法

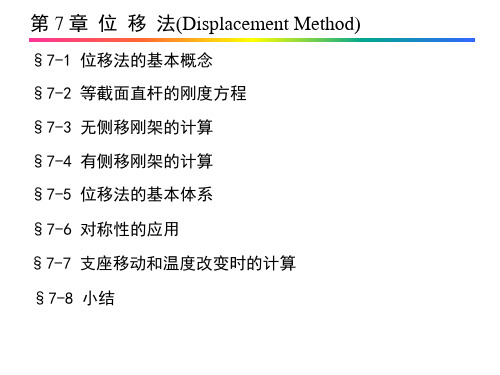
M AB
(a)
B M BA
M=1 A
(b)
1
(c)
A
1 B M=1
2)求图(2)中 φA2和φB2
3)叠加得到
A
l
l
3EIMAB6EIMBA
l
B
6El IMAB3Ei IMBA
l
变换式上式可得杆端内力的刚度方程(转角位移方程):
MA
B
4iA
2iB
6i
l
MB
A
2iA
4iB
6i
l
由平衡条件得杆端剪力:见图(d)
M AB A
(d)
B M BA
F QAB
FQAB
FQBA
MAB
l
MBA
6i l
A
6i l
B
12i l2
F QBA
1.两端固定单元,在A端发生一个顺时针的转角 A。
A MAB A
由力法求得
B MBA
2i
M
AB
4
EI L
A
4i A
M
BA
2
EI L
A
2i A
4i
M
2.两端固定单元,在B端发生一个顺时针的转角 B。
MAB A
B
由力法求得
B MBA
M
BA
4
EI L
B
4i B
M
AB
2
EI L
B
2i B
3.两端固定单元,在B端发生一个向下的位移 。
A MAB
B MBA
由力法求得
△
M
AB
6EI L2
6i L
M
BA
结构力学I-第7章 位移法

Page
LOGO
§7-1位移法基本概念
位移法基本方程:
i 1 5
EAi sin 2 i FP li
FP EAi sin 2 i i 1 li
5
关键的一步!
将杆数由5减少为2,这时的结 构是静定的;如果杆数大于 (或等于)3时,结构是超静 定的。
以上两种情况都可以用上述 方法计算!
(2) 杆件转角以顺时针为正 , 反之为负。杆件两端在垂直 于杆轴方向上的相对线位移 ΔAB (侧移)以使杆件顺时针转 动为正,反之为负。 B A B A θB
θ
A
AB
2015-12-21
Page
14
浙江大学海洋学院 Tel : Email:
LOGO
§7-2 单跨超静定梁的形常数与载常数
ΔAB F M AB l
Page
23
LOGO
§7-2单跨超静定梁的形常数与载常数
3. 一端固定、一端定向的等截面直杆
MAB A A
A
β AB
F EI
B
B
AB
FQBA=0,ΔAB是θA 和θB的函 数,转角位移方程为
F M AB i AB A i AB B M AB F M BA i AB A i AB B M BA
2015-12-21
LOGO
§7-2单跨超静定梁的形常数与载常数
2. 一端固定、一端铰支的等截面直杆
MAB A A FS BA l FS BA
A
F EI
B
AB
MBA=0,θB 是θA 和ΔAB的函数,转角位移方程为
M AB 3i AB A 3i AB M BA 0
结构力学 7.位移法
§7-1 位移法的基本概念
2 位移法计算刚架的基本思路
(1)基本未知量——A 和。
(2)建立位移法基本方程 ■刚架拆成杆件,得出杆件的刚度方程。 ■杆件合成刚架,利用刚架平衡条件,建立位移法基本方程。
§7 – 2 等截面直杆的刚度方程 正负号规定
结点转角 A 、 B 、弦转角( = / l ) 和杆端弯矩M AB
0
0
6
5ql
3ql
3l / 8
8
8
9ql2 / 128
(↑) (↑)
2ql
ql
7
5
10
(↑) (↑)
8
9ql
11ql
40
40
(↑) (↑)
§7-2 等截面杆件的刚度方程
表1:载常数表(续)
序号 计算图及挠度图
弯矩图及固端弯矩
9
10
5FPl / 32
11
12
固端剪力
FQAB
FQBA
FPb(3l 2 b2 ) 2l 3
M AB
4i A
2i B
6i
l
M BA
2i A
4i B
6i
l
(1)B端为固定支座 B 0
FQ AB FQ BA
6i l
A
6i l
B
12i l2
(2)B端为铰支座 MBA 0
M AB
4i A
6i
l
M BA
2i A
6i
l
M AB
3i A
3i
l
§7-2 等截面杆件的刚度方程
M AB
24
25
26
27
固端剪力
结构力学第七章-位移法(一)

由 M B = 0 同理可得,
FQAB 6i 6i 12i F A B 2 FQAB l l l
结构力学 第七章 位移法
2015年9月12日星期六
§7-2 等截面直杆的转角位移方程
等截面直杆的转角位移方程:
一端固端一端铰支的等截面直杆:
B端角位移不独立。
C
B A
AB:一端固定一端定向滑动 BC:一端固定一端定向滑动 BD:一端固定一端铰支
C
EI=c D B A
AB:两端固定 BC:一端固定一端定向滑动 BD:一端固定一端铰支
C
EI=c D B A
AB:两端固定 BC:两端固定 BD:一端固定一端铰支
C
EI=c D EI=c B A
AB:两端固定 BC:一端固定一端定向滑动 BD:两端固定
R1 = 0 R2 = 0 R3 = 0
R11 Z1
R21
R31
R12
R22 Z2
R32
R13
R23
R1P R33
R2P
P2
R3P
D EI=c A
E
F
D EI=c
E
F
D EI=c
E
F
P1
D EI=c A
E
F
B
C
A
B
C
A
B
C
B
C
(a)基本结构只发生 Z1
(b)基本结构只发生 Z 2
EI 1
B’ O
B
A’
EI
EI
EI
A EI
EI 1
不考虑杆件伸缩变形,AB 不能转动,无结点角位移
结构力学 第七章 位移法
结构力学第七章位移法

10
§7-3 位移法基本结构与未知量数目
二 位移法基本结构 1 附加刚臂 控制结点转动 2 附加链杆 控制结点线位移
ΔC C θC
ΔD θD
D
基本结构
将原结构结点位移锁住,所得单跨梁的组合体
11
三 位移法基本结构与未知量数目
ΔC
ΔD
Z1
θD
C θC
D
Z2 Z3
基本结构
结点角位移的数目=刚结点的数目=附加刚臂的数目 独立结点线位移的数目=附加链杆的数目
B
15i 16
6
0(2)
位移法方程实质上平衡方程 33
2i
3i/2Z2=1
A
D
2i
k 21
FQ BA
FQ CD
3i 2
B
C k22
FQBA
FQCD
3i
i2
3i/2
k 22
i
3i 4
3i 16
15i 16
B i
0
FQ BA
3i 4
C FQCD i
3i 2
M1
3i 4
A
FQ CD
3i 16
3i/2
D 3i/4 26
4
B
C F2P
3kN/m 3kN/m
16
皮肌炎图片——皮肌炎的症状表现
▪ 皮肌炎是一种引起皮肤、肌肉、 心、肺、肾等多脏器严重损害的, 全身性疾病,而且不少患者同时 伴有恶性肿瘤。它的1症状表现如 下:
▪ 1、早期皮肌炎患者,还往往伴 有全身不适症状,如-全身肌肉酸 痛,软弱无力,上楼梯时感觉两 腿费力;举手梳理头发时,举高 手臂很吃力;抬头转头缓慢而费 力。
结构力学——位移法

结构力学——位移法结构力学,位移法结构力学是研究物体受到外力作用时的变形和应力分布规律的学科。
在结构力学中,位移法是一种常用的分析方法,用于解决结构受力变形问题。
位移法是建立在位移场的基础上,通过求解物体的位移场,再根据位移场得到应力场、应变场以及应力分布等信息,从而获得结构的受力变形情况。
位移法的基本原理是微分方程的解析方法。
在位移法中,首先需要确定结构的几何形状、边界条件和外力情况,然后通过应变能原理或变分原理等方法建立物体的弯曲方程或应变能方程。
接下来,在确定了适当的位移函数形式后,将其代入方程中,通过求解微分方程来得到物体的位移场。
在位移法中,常用的位移函数形式包括简单弯曲、直角坐标、梯形分段等。
根据结构问题的具体条件,选择合适的位移函数形式,是位移法分析的一个重要步骤。
在求解位移函数时,通常要满足边界条件和界面连续条件。
边界条件是指结构边界上位移和应力的已知条件,界面连续条件是指相邻物体的位移和应力在界面上连续的条件。
求解位移场后,可以根据位移场求出应变场。
应变场是位移场的导数,反映了物体各点的拉伸和压缩程度。
通过求解应变场,可以进一步求解应力场。
应力场是应变场的导数,反映了物体各点的强度和应力分布情况。
由于应力是物体受力的重要指标,因此通过求解应力场,可以分析出物体受力分布情况,评估结构的强度和稳定性。
位移法在结构力学中具有重要的应用价值。
通过求解位移场,可以全面了解结构受力变形情况,为结构的设计和施工提供依据。
位移法不仅能够分析简单的结构问题,还可以扩展应用到更复杂的结构问题中,如悬索桥、拱桥和空间柱等。
位移法不仅适用于线性问题,还可以应用于非线性问题,如大变形、大位移和材料非线性等。
总之,位移法是结构力学中一种常用的分析方法,通过求解物体的位移场,可以获得结构的应力和变形情况。
位移法不仅能够分析简单的结构问题,还可以应用于复杂的结构问题。
通过位移法的研究,可以更全面地了解结构的受力变形情况,为结构的设计和施工提供依据。
结构力学中的位移法
结构力学中的位移法
位移法是基于以下假设的:结构单元之间的约束全部通过边界条件来
体现,结构中的材料是线弹性材料,结构中的每个单元之间是相互独立和
互不干扰的。
位移法的基本思想是首先假设结构的位移场,然后利用位移场的表达
式和边界条件,推导出结构的应力、应变和位移等信息。
具体步骤如下:
1.确定结构的约束条件:根据结构的平衡条件,确定结构各部分之间
的约束关系。
一般包括边界条件和连接条件等。
2.建立位移场:通过将结构的变形分解为一系列位移函数的线性组合,建立位移场。
常用的位移函数包括常数、线性函数、二次函数等。
3.推导位移场的表达式:利用结构的几何关系和材料的力学性质,根
据平衡条件和应力-应变关系,推导出位移场的表达式。
4.边界条件和连接条件:利用结构的边界条件和连接条件,确定位移
场中的待定系数。
5.应力和应变的计算:利用位移场的表达式和应力-应变关系,计算
结构中各点的应力和应变。
6.变形和位移的计算:利用位移场的表达式,计算结构中各点的变形
和位移。
7.校核:通过校核位移场的可行性和合理性,验证所得结果的准确性。
位移法的优点是可以处理各种复杂的边界条件和载荷情况,适用于各
种不规则结构。
但是位移法也存在一些局限性,如要求解一些复杂结构时,可能需要大量的计算和繁琐的推导过程。
总之,位移法是结构力学中一种重要的解决结构问题的方法,通过确定结构的位移场来分析结构的力学性能,具有广泛的应用前景。
在实际工程中,位移法被广泛运用于结构设计和分析中,是一种非常有效的结构分析方法。
结构力学位移法
结构力学位移法结构力学是研究结构物的力学性能和变形规律的科学,位移法是结构力学中常用的一种分析方法。
它通过计算结构物各个节点的位移,进而求解出结构物的应力、应变等力学参数。
下面将详细介绍位移法的原理和应用。
一、位移法的原理位移法是一种基于力的平衡方程和位移的相关性质来计算结构物响应的方法。
它的基本原理是通过建立结构物的整体刚度方程,解这个方程得到各节点的位移,再根据位移计算出相应节点上的应力和应变。
在应用位移法时,首先需要确定结构物的受力状态,即施加在结构物上的外力和边界条件。
然后,根据结构物的几何约束条件和材料特性,建立结构物的整体刚度方程。
这个方程是一个描述结构物节点位移与受力关系的方程,通常表示为[K]{D}={F},其中[K]是结构物的刚度矩阵,{D}是节点位移矩阵,{F}是节点受力矩阵。
解刚度方程可以得到节点位移矩阵{D},再通过位移与应力或应变的关系,计算出各个节点上的应力和应变。
常用的位移与应力或应变的关系包括伯努利梁理论、平面假设等。
最后,根据应力或应变条件,判断结构物的安全性和稳定性。
二、位移法的应用位移法广泛应用于各种结构物的力学分析和设计中,特别是对于复杂结构和非线性问题的分析更具优势。
1.梁和框架的分析对于梁和框架结构,可以根据位移法计算出节点上的位移、弯矩、剪力和轴力等力学参数。
通过对结构物的力学性能的准确分析,可以进行合理的结构设计和优化。
2.刚架和刚构的计算在刚架和刚构的计算中,位移法可以用来求解节点刚度,从而得到结构物的受力分布和变形情况。
这对于评估结构物的稳定性和刚度有重要意义。
3.非线性问题的分析位移法还可以应用于非线性结构的分析,如软土地基的承载力计算、非线性材料的应力分析等。
在这些情况下,结构物的刚度和应力等参数会随着受力状态的变化而发生变化,需要通过迭代的方法来求解。
4.动力分析位移法也可以用于结构物的动力分析。
动力分析主要研究结构物在动态载荷下的响应和振动特性。
龙驭球《结构力学Ⅰ》(第4版)笔记和课后习题(含考研真题)详解(中册)-第七章【圣才出品】
圣才电子书 十万种考研考证电子书、题库视频学习平台
(b)如图 7-2-3 所示。
图 7-2-2
图 7-2-3 ①当α≠0 时,结点 A、B、C、E、F、G 有转角,AB、FG 有水平位移,C、E 点有两个 水平位移,所以基本未知量有 10 个,分别是θA、θB、θC、θE、θF、θG、ΔA、ΔG、ΔC、ΔE。 ②当α=0 时,结点 A、B、C、E、F、G 有转角,AB、FG 有水平位移,CDE 有水平位 移,D 点有竖向位移,所以基本未知量有 10 个,分别是θA、θB、θC、θE、θF、θG、ΔA、Δ G、ΔC、ΔVD。 (c)如图 7-2-4 所示。 ①当不考虑轴向变形时,结点 A、B、C 有转角,整体有一个水平位移,所以基本未知 量有 4 个,分别是θA、θB、θC、Δ。
15 / 134
圣才电子书 十万种考研考证电子书、题库视频学习平台
②当考虑轴向变形时,A、B、C 三个结点都有独立的转角、竖向位移、水平位移,所 以基本未知量有 9 个,分别是θA、θB、θC、ΔA、ΔB、ΔC、ΔVA、ΔVB、ΔVC。
图 7-2-4 (d)如图 7-2-5 所示。 ①当α≠0 时,结点 B、C 有转角,D 结点有独立的竖向位移,所以基本未知量有θA、θ B、ΔV。 ②当α=0 时,结点 B、C 有转角,虽然 D 结点有位移,但不是独立的,所以基本未知 量有θA、θB。
图 7-1-8 反对称荷载作用下奇数跨对称结构的半结构选取方法 图 7-1-9 对称荷载作用下偶数跨对称结构的半结构选取方法
12 / 134
ቤተ መጻሕፍቲ ባይዱ
圣才电子书 十万种考研考证电子书、题库视频学习平台
图 7-1-10 反对称荷载作用下偶数跨对称结构的半结构选取方法 7.2 课后习题详解
结构力学第7章位移法讲解
关于刚架的计算思路
A
P C
q
A
A
M AB
P A
A
M AB
A
C
B
B
第一种位移法的基本思路:
将结构拆成杆件,推导各杆件的内力和位 移的关系;再把杆件组装成结构,通过各 杆件在结点处的受力平衡列基本方程。
l
l
(1)
l FQBA
6i l
A
6i l
B
12i l2
(2)
几种不同远端支座的刚度方程
(1)远端为固定支座
MAB
A
EI l
(2)远端为固定铰支座
MAB
A
EI l
(3)远端为定向支座
MAB
A
EI
l
MBA
M M
AB BA
4i A 2i A
M BA
(2)由于相对线位移引起的A和B
A 2 B 2
A2 B2 l
以上两过程的叠加
A
1 3i
M
AB
1 6i
M
BA
l
M AB M BA
4i A 2i A
B
2iB 6i
4iB 6i
FQAB
1
1
6i
M AB
3i
M BA
BA
8
8
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第7章位移法教学目的掌握位移法的基本概念;正确的判断位移法基本未知量的个数;熟悉等截面杆件的转角位移方程;熟练掌握用位移法计算荷载作用下的刚架的方法了解位移法基本体系与典型方程的物理概念和解法。
二.主要章节§ 7-1位移法的基本概念§ 7-2杆件单元的形常数和载常数一位移法的前期工作§ 7-3位移法解无侧移刚架§ 7-4位移法解有侧移刚架§ 7-5位移法的基本体系§7-6对称结构的计算* §7-7支座位移和温度改变时的位移法分析(选学内容)§ 7-8小结§ 7-9思考与讨论三.学习指导位移法解超静定结构的基础是确定结构的基本未知量以及各个杆件的转角位移方程,它不仅可以解超静定结构,同时还可以求解静定结构,另外,要注意杆端弯矩的正负号有新规定。
四.参考资料《结构力学(丨)-基本教程第3版》P224〜P257第六章我们学习了力法,力法和位移法是计算超静定结构的两个基本方法,力法发展较早,位移法稍晚一些。
力法把结构的多余力作为基本未知量,将超静定结构转变为将定结构, 按照位移条件建立力法方程求解的;而我们今天开始学的这一章位移法则是以结构的某些位移作为未知量,先设法求出他们,在据以求出结构的内力和其他位移。
山位移法的基本原理可以衍生出其他儿种在工程实际中应用十分普遍的讣算方法,例如力矩分配法和迭代法等。
因此学习本章内容,不仅为了掌握位移法的基本原理,还未以后学习其他的计算方法打下良好的基础。
此外,应用微机计算所用的直接刚度法也是曲位移法而来的,所以本章的内容也是学习电算应用的一个基础。
本章讨论位移法的原理和应用位移法计算刚架,取刚架的结点位移做为基本未知量,III 结点的平衡条件建立位移法方程。
位移法方程有两种表现形式:①直接写平衡返程的形式(便 于了解和计算)②基本体系典型方程的形式(利于与力法及后面的汁算机汁算为基础的矩阵 位移法相对比,加深理解)§7-1位移法的基本概念1. 关于位移法的简例为了具体的了解位移法的基本思路,我们先看一个简单的桁架的例子:课本P225。
图7-1 和图7~2所示。
(a ) (a )图7-1第一步:从结构中取出一个杆件进行分析。
(杆件分析)图7-2中杆件AB 如已知杆端B 沿杆轴向的位移为匕(即杆件的伸长)则杆端力F M 为:E-为弹性模量,A-为杆件截面面积,厶-为杆件长度(b)B‘B n图7-2(7-1)(b)Ui 二 Asin ai匕一使杆端产生单位位移时所需施加的杆端力--刚度系数公式(7-1)的物理意义:表明杆件的杆端力几,与杆端位移“,之间的关系一-杆件的刚度 方程。
第二步:把各杆件综合成结构。
(整体分析) 各杆端位移冷与基本未知量/之间的关系为:加匕(a)B 点的半衡条件为》F = 0得:为F N I Sina j = F /t (b)由 7-1 式和(a)式带入(b)式得:Sin a,A = F p (c) i=\ A(c)式就是位移法的基本方程,它表明结构的位移zl 与荷载竹之间的关系。
由(c)式可得:4=—— (d)完成了位移法中的关键一步为竿Si 也/=1€ " S“q ・再代入(7-1)得: 工竿曲%匸I I;在图7-1中如果只是两根杆时结构是静定的(相当于固定一个结点的方式,用两根不共 线的链杆)。
当杆数大于2时,结构式超静定的。
所以用位移法计算时,计算方法并不因结 构是静定结构还是超静定结构而有所不同。
山以上简例可以归纳岀位移法的要点如下:(1) 位移法的基本未知量是结构的结点位移(图7-1中的B 点的位移/) (2) 位移法的基本方程是平衡方程(B 点的y 方向的投影平衡方程式工匚=0) (3) 建立基本方程的过程分为两步:a :将结构拆成杆件,进行杆件分析得出杆件的刚度方程;b :再把杆件综合成结 构,进行整体分析得出基本方程。
(4) 根据位移法方程解出基本未知量并山此计算各杆的内力。
求各杆轴力可将求得的4代入(d)式得曾〜(e)位移法就是将结构拆了再搭的讣算过程一基本思路。
杆件分析是结构分析的基础,杆件的刚度方程是位移法的基本方程的基础。
因此位移法也称为刚度法。
位移法与力法的区别:1.主要区别是基本未知量不同:力法是取结构中的多余未知力作为基本未知量;位移法是以结点位移(线位移和角位移)作为基本未知量。
2.建立的基本方程不同:力法是山变形协调条件建立位移方程;位移法是山平衡条件建立的平衡方程。
注:力法的基本未知量的数目等于超静定次数,而位移法的基本未知量与超静定次数无关。
如左图所示:力法计算,9个基本未知量;位移法计算,1个基本未知量2.位移法计算刚架的基本思路以上结合链杆系的情况对位移法的基本思路做了简短的说明。
现在再结合刚架的情况作进一步的介绍。
在刚架的分析中,通常只考虑弯曲变形,忽略剪切和拉伸变形。
下面结合简单实例说明位移法的基本思路。
图7-3如图7-3°所示的刚架,在荷载的作用下发生变形,杆件曲、应'在结点方处有相同的转角0,称为结点方的角位移。
将整个刚架分解为月万、兀杆件,则初杆件相当于两端固定的单跨粱,固定端B发生一7-3c )。
如果能够求出角位移,则能够计算出杆件的内力,问题的关键是求结点的角位移。
用位移法计算刚架,结点的位移是处于关键地位的未知量,基本思路是拆了再搭,将刚架拆成杆件,进行求解;再将杆件合成为刚架,利用平衡条件求出位移。
对于位移法的基本计算将在今后具体分析。
§ 7-2等截面杆件的刚度方程一.教学目的本节是位移法的基础,理解杆端力与杆端位移及荷载之间的关系,正确理解杆端剪力和弯矩的符号,掌握杆端位移方程,能够判定和选择杆端剪力和弯矩。
二.主要内容1.由杆端位移求杆端弯矩(1)由杆端位移求杆端弯矩(2)2.由荷载求固端弯矩(1)山荷载求固端弯矩(2)三.学习指导本节主要讨论一个杆件的杆端力与杆端位移及荷载之间的关系,要正确理解其中的关系和符号。
根据位移法的基本思路,以及为了更好的进行位移法的计算,需要讨论等截面杆件的两个问题:山杆端位移求杆端弯矩和山荷载求固端弯矩。
四.参考资料《结构力学教程(I )》P227〜P2327. 2.1由杆端位移求杆端弯矩(1)图7-4为等截面杆件,截面惯性矩为常数。
已知端点力和方的角位移分别是心和血, 两端垂直于杆轴的相对线位移为A ,拟求杆端弯矩M BA Q1/在位移法中位移的正负号规定为:结点转角,弦转角和杆端弯矩一律以顺时针为正。
这一点一定要注意与以前的不同。
应用单位荷载法可得出:a 1 " 1 ” A务二召"心一耳"加+T a 1 “1 “ A+ 召施刼 + 了杆件的线刚度i=EI/l解联立方程可得:M亞—-I-2i- 6i y-M EA = 2込+4迅一利用平衡条件可求出杆端剪力如下:+^T A加= %BA=-于是可将上式写为:则矩阵称为杆件的刚度矩阵,其中的系数称为刚度系数,又称为形常数。
上面公式利用力法计算过程:1.用力法来讣算简支梁在两端力偶M AB 、M BA 作用下产 生的杆端转角為、&B 。
BAM BA8 _ 1 (M“+MW 2 MA El232玄型G_T0 1 M BA 8El23 2=BA -El 362•考虑两端有相对竖向位移A,杆件的线刚度i=EI/b 所以:3BZ•—& MAB + 务 + T下面讨论杆端具有不同约束时的刚度方程。
7.2.1由杆端位移求杆端弯矩(2)根据前面的讨论得出一般情况下的刚度方程4i21 — -二2i 4j6i 6i 12zA■ _ I■ --- p J以下将利用以上结论讨论杆件在不同的支承条件下的刚度方程。
对于图7-6a B 端为固定支座,%二0 ,则得呱=4吗-6吟M 刼二 220乂_&¥4]图7-5对于图7-6b 万端为较支座,您二0 ,则得下面将讨论山荷载引起的固端弯矩。
7. 2.3由荷载求固端弯矩(1)—载常数对于常见的三种粱:两端固定;一端固定、另一端简支;一端固定另一端滑动支承,下 表给出常见荷载作用下的杆端弯矩和剪力,又称固端弯矩和剪力用M :B 、M 仏、F$BA 、固端弯矩和剪力,表7-1。
单跨超静定梁由单位杆端位移引起的杆端力称为形常数。
单跨超静定梁简图M AB M BA F QAB =F QBA皿—一一孕4i 2i-Gi/l 妙 如-%%A 处—一一-黑3i对于图7-6c 万端为滑动支座,M 脳二玉8■玉+血二0和甩二0甩二0 ,则得硝必表示,其正负号要注意。
因为它们只与荷载形势有关的常数,所以乂称载常 O 下面是M 心=,&山£A =一泅卫图7-6简 ffi89一 S 1 一*1fisiw 弯矩(以向为正)-誉F.bW 7〉2?阖堆剪力^QAT* 二寻*尺"二 _K3£") 2^^QAB =F"⑶-<3) 2?1342ITM 入=—‘J (21 — a)25 1AAr = /| - /2ElaAtF 打=F P临=0弧=0FU =0最后利用叠加原理得到杆端弯矩的一般公式为:呱二①务+ 2汕犷6耳BA.- 2)务+G為一6昨+M盒上式也称为等截面直杆的转角-位移方程。
§ 7-3无侧移刚架的计算教学目的本节是位移法在计算刚架中的直接应用,能够正确的确定基本未知量,熟练的掌握转角位移方程的应用并能够求解无侧移刚架和粱的内力。
二.主要内容1.一般概念及过程2.实例分析三.学习指导本节的关键是转角位移方程的应用,其中荷载项可查表讣算,注意正负号的规定,要多进行练习。
四.参考资料《结构力学(I )》P232〜P2357. 3. 1 一般概念及过程无侧移刚架:刚架的各结点(不包括支座)只有角位移而没有线位移。
下面通过连续梁的计算来介绍位移法的实际过程。
图7-8&为一连续粱,试分析内力。
图7-81.基本未知量只有结点万的角位移052.查表列出各杆的固端弯矩-=—15Mpa : M;i=^^ = 15 Mpa;M= —= —9 Mpa3.各杆的杆端弯矩:- 2j^-15M创= 4i& + 15岭W94.建立位移法基本方程,结点万为隔离体图7-8b ,列平衡方程,并求解= 0 M预+ 必抚<二0即7叫+6 = 05.计算各杆杆端弯矩M血=-16.72 kN-m11.57 kN・m=-11.57kN-m最后画出弯矩图(图7-8c)。
画图时注意弯矩画在受拉一侧。
一般的情况,每一个刚结点由一个结点转角----基本未知量;与此相应,在每一个刚结点处又可写一个力矩平衡方程--一基本方程。