风光互补发电实训系统实训方案
郑州大学风光互补发电系统实验手册 -SY17
实验17风力发电机功率点跟踪控制实验一、实验目的1.了解风力发电机充电原理。
2.熟练掌握风力发电机功率点跟踪控制实验的操作步骤。
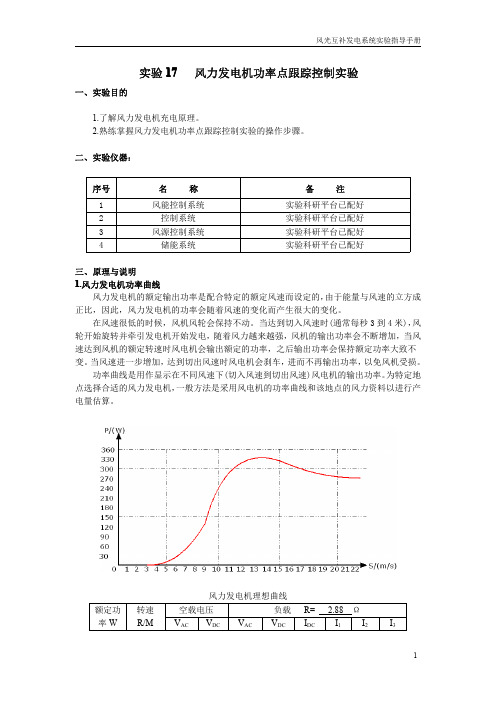
二、实验仪器:序号名称备注1风能控制系统实验科研平台已配好2控制系统实验科研平台已配好3风源控制系统实验科研平台已配好4储能系统实验科研平台已配好三、原理与说明1.风力发电机功率曲线风力发电机的额定输出功率是配合特定的额定风速而设定的,由于能量与风速的立方成正比,因此,风力发电机的功率会随着风速的变化而产生很大的变化。
在风速很低的时候,风机风轮会保持不动。
当达到切入风速时(通常每秒3到4米),风轮开始旋转并牵引发电机开始发电,随着风力越来越强,风机的输出功率会不断增加,当风速达到风机的额定转速时风电机会输出额定的功率,之后输出功率会保持额定功率大致不变。
当风速进一步增加,达到切出风速时风电机会刹车,进而不再输出功率,以免风机受损。
功率曲线是用作显示在不同风速下(切入风速到切出风速)风电机的输出功率。
为特定地点选择合适的风力发电机,一般方法是采用风电机的功率曲线和该地点的风力资料以进行产电量估算。
风力发电机理想曲线额定功率W转速R/M空载电压负载R= 2.88ΩV ACV DCV ACV DCI DCI 1I 2I 3300W/24V20018.33111.7613 5.4911125022.63714.417 6.3 1.5 1.5 1.530027.54217.1207.122235032.14819.5238.144440036.35422.1268.955545040.26024.2299.55.55.55.5图17-1风力发电机实际带载数据2.风力发电机充电原理下图的风力发电机充电电路。
风力发电机输出电压为5V 一30V 为例,对如此悬殊的输入电压范围,采用了图17-1中的电路结构。
在风力发电机输出电压低时,用斩波型升压电路(BOOST)把电压升,转换为蓄电池电压。
风光互补发电实训系统实训方案
风光互补发电实训系统实训方案型风光互补发电实训系统主要由光伏供电装置、光伏供电系统、风力供电装置、风力供电系统、逆变与负载系统、监控系统组成,如图所示。
型风光互补发电实训系统采用模块式结构,各装置和系统具有独立的功能,可以组合成光伏发电实训系统、风力发电实训系统。
各单元介绍1、光伏供电装置(1)、光伏供电装置的组成光伏供电装置主要由光伏电池组件、投射灯、光线传感器、光线传感器控制盒、水平方向和俯仰方向运动机构、摆杆、摆杆减速箱、摆杆支架、单相交流电动机、电容器、直流电动机、接近开关、微动开关、底座支架等设备与器件组成,如图所示。
块光伏电池组件并联组成光伏电池方阵,光线传感器安装在光伏电池方阵中央。
盏的投射灯安装在摆杆支架上,摆杆底端与减速箱输出端连接,减速箱输入端连接单相交流电动机。
电动机旋转时,通过减速箱驱动摆杆作圆周摆动。
摆杆底端与底座支架连接部分安装了接近开关和微动开关,用于摆杆位置的限位和保护。
水平和俯仰方向运动机构由水平运动减速箱、俯仰运动减速箱、直流电动机、接近开关和微动开关组成。
直流电动机旋转时,水平运动减速箱驱动光伏电池方阵作向东方向或向西方向的水平移动、俯仰运动减速箱驱动光伏电池方阵作向北方向或向南方向的俯仰移动,接近开关和微动开关用于光伏电池方阵位置的限位和保护。
(2)、光伏电池组件光伏电池组件的主要参数为:额定功率额定电压额定电流开路电压短路电流尺寸××2、光伏供电系统(1)、光伏供电系统的组成光伏供电系统主要由光伏电源控制单元、光伏输出显示单元、触摸屏、光伏供电控制单元、充放电控制单元、信号处理单元、西门子、继电器组、接线排、蓄电池组、可调电阻、断路器、开关电源、网孔架等组成。
如图所示。
(2)、控制方式光伏供电控制单元的追日功能有手动控制盒自动控制两个状态,可以进行手动或自动运行光伏电池组件双轴跟踪、灯状态、灯运动操作。
()、充、放电控制单元和信号处理单元蓄电池的充电过程及充电保护由充电控制单元、信号处理单元及程序完成,蓄电池的放电保护由放电控制单元、信号处理单元完成,当蓄电池放电电压低于规定值,放电控制单元输出信号驱动继电器工作,继电器常闭触点断开,切断蓄电池的放电回路。
YUY-F500风光互补发电测量与控制实训系统

YUY-F500风光互补发电测量与控制实训系统系统实训应用范围:主要面向职高、大学、研究生、企业技工以风力发电和太阳能离网、并网发电为主课题的研究和培训。
风光互补发电实训台一、主要技术规格参数1、系统规格◆系统工作电压:12/24V DC 220VAC◆系统最大电流:10A◆系统最大功率:500W2、单晶硅太阳能电池规格◆组件尺寸(L*W*H):536*477*28mm×4◆最佳功率:25W◆最佳工作电压:17.05±0.5V◆最佳工作电流:1.43±0.10A,◆短路电流:1.6±0.10A,◆开路电压:21.0±0.5V太阳能电池3、风机力发电机参数◆额定功率:400(W)◆额定电压:12/24(V)◆额定电流:33.3/16.7(A)◆风轮直径:1.5(m)◆启动风速:2.5(m/s)◆额定风速:9.6(m/s)永磁同步风力发电机◆安全风速:35(m/s)◆发电机工作形式:永磁同步发电机◆风叶旋转方向:顺时针◆风叶数量:3(片)◆风叶材料:玻璃增强聚丙烯材料◆电机材料:铝合金&不锈钢4、模拟风洞模块◆风量:32073 mз/h◆风压:388Pa◆转速:1450 r/min◆功率:5.0kW4、风光互补控制器规格模拟风洞◆工作电压:12VAC◆充电功率:400W◆充电方式:PWM脉宽调制◆充电最大电流35A◆过放保护电压11V◆过放恢复电压12.6V◆输出保护电压16V风光互补控制器◆卸载开始电压(出厂值)15.5V◆卸载开始电流(出厂值)15A◆控制器设有蓄电池过充、过放电保护、蓄电池开路保护、负载过电压保护、夜间防反充电保护、输出短路保护、电池接反保护、欠压和过压防震荡保护、均衡充电、温度补偿、光控开关功能;◆负载为100W以下的12V/24V直流负载,控制单元一通道为常开输出,另一通道为多类定时输出(光控开、光控关,定时开、定时关,)。
KNT-WP01型 风光互补发电实训系统1
风光互补发电实训系统技术方案南京康尼科技实业有限公司2013年2月26日第一部分:技术参数KNT-WP01型风光互补发电实训系统一、概述2013年全国职业院校技能大赛高职组“风光互补发电系统安装与调试”赛项使用的大赛设备是由南京康尼科技实业有限公司研发生产的产品“KNT-WP01型风光互补发电实训系统”。
二、设备组成KNT-WP01型风光互补发电实训系统主要由光伏供电装置、光伏供电系统、风力供电装置、风力供电系统、逆变与负载系统、监控系统组成,如图1所示。
KNT-WP01型风光互补发电实训系统采用模块式结构,各装置和系统具有独立的功能,可以组合成光伏发电实训系统、风力发电实训系统。
(1)、设备尺寸:光伏供电装置1610×1010×1550mm风力供电装置1578×1950×1540mm实训柜3200×650×2000mm(2)、比赛场地面积:20平方米图1 KNT-WP01型风光互补发电实训系统三、各单元介绍1、光伏供电装置(1)、光伏供电装置的组成光伏供电装置主要由光伏电池组件、投射灯、光线传感器、光线传感器控制盒、水平方向和俯仰方向运动机构、摆杆、摆杆减速箱、摆杆支架、单相交流电动机、电容器、直流电动机、接近开关、微动开关、底座支架等设备与器件组成,如图2所示。
图2 光伏供电装置4块光伏电池组件并联组成光伏电池方阵,光线传感器安装在光伏电池方阵中央。
2盏300W的投射灯安装在摆杆支架上,摆杆底端与减速箱输出端连接,减速箱输入端连接单相交流电动机。
电动机旋转时,通过减速箱驱动摆杆作圆周摆动。
摆杆底端与底座支架连接部分安装了接近开关和微动开关,用于摆杆位置的限位和保护。
水平和俯仰方向运动机构由水平运动减速箱、俯仰运动减速箱、直流电动机、接近开关和微动开关组成。
直流电动机旋转时,水平运动减速箱驱动光伏电池方阵作向东方向或向西方向的水平移动、俯仰运动减速箱驱动光伏电池方阵作向北方向或向南方向的俯仰移动,接近开关和微动开关用于光伏电池方阵位置的限位和保护。
风光互补实训报告
风光互补实训报告一、引言风光互补是指通过光伏发电系统与风力发电系统的结合,实现能源的互补利用。
本报告旨在总结和分析风光互补实训的过程和结果,探讨该技术在可再生能源领域的应用前景。
二、实训背景随着能源需求的不断增长和环境问题的日益突出,可再生能源成为了解决能源短缺和环境污染的重要途径之一。
风能和光能作为两种常见且具有广泛分布的可再生能源,其互补利用具有巨大潜力。
因此,风光互补技术的研究和应用受到了广泛关注。
三、实训目的本次实训的目的是通过搭建风光互补实验平台,了解风能和光能的特点以及其互补利用技术的原理和方法。
通过实际操作和数据分析,进一步掌握风光互补系统的运行机理和性能评估方法,为今后的研究和应用提供基础支撑。
四、实训内容1. 搭建实验平台:根据实训要求,我们搭建了风光互补实验平台,包括光伏发电系统和风力发电系统。
光伏发电系统利用太阳能转化为电能,而风力发电系统则利用风能转化为电能。
两个系统通过逆变器和电网连接,实现了能源的互补利用。
2. 数据采集与分析:我们通过数据采集系统实时监测和记录了平台的发电功率、风速、光强等数据。
通过对这些数据的分析,我们可以了解风力发电系统和光伏发电系统的运行状况,以及风光互补系统的总体性能。
3. 性能评估与优化:基于采集到的数据,我们对风光互补系统的性能进行了评估,并提出了一些优化建议。
例如,根据风速和光强的变化情况,我们可以调整风力发电系统和光伏发电系统的工作参数,以提高系统的整体发电效率。
4. 经济与环境效益分析:在风光互补实训中,我们还对系统的经济和环境效益进行了分析。
通过比较风光互补系统与单一光伏发电系统或风力发电系统的发电量和成本,我们可以评估风光互补技术的经济可行性和环境友好性。
五、实训结果与讨论通过实训,我们得出了以下结论:1. 风光互补系统能够有效利用风能和光能,提高能源利用效率,具有较好的发电性能。
2. 风速和光强的变化对风光互补系统的发电效率有较大影响,需要根据实际情况进行参数调整和优化。
风光互补系统实验(圣威科技)王鑫
风光互补发电系统实验指导书第一版2013年目录实验一光伏发电系统基本认识实验 (3)实验二光伏发电基本原理实验 (6)实验三太阳能发电基本要素对光伏发电的影响实验 (12)实验四太阳能光伏对蓄电池的充放电实验 (16)实验五利用控制器进行最大功率点的跟踪实验 (19)实验六太阳能发电逆变原理实验 (22)实验七太阳能不同负载发电试验 (25)实验八光伏发电系统综合设计实验 (29)实验九风力发电原理及组成部分基本认识实验 (32)实验十风力发电充放电试验 (35)实验十一风力发电最大功率点追踪实验 (37)实验十二PLC控制实验 (39)实验十三风光互补发电逆变原理实验 (42)实验十四风光互补发电负载实验 (45)实验一光伏发电系统基本认识实验一、实验目的1、对此系统如何模拟太阳光的运行有所了解;2、对太阳循迹系统的工作方式有所认识;3、熟悉一下实验装置的具体组成部分。
二、实验设备太阳光模拟系统、光控循迹系统、实验柜三、实验原理(1)太阳光模拟系统及循迹系统的组成如下图所示:图1-1 实验外观图光伏供电装置主要由光伏电池组件、投射灯、水平方向和俯仰方向运动机构、水平运动和俯仰运动直流电动机、限位开关、底座支架等设备与器件组成。
光伏电池方阵由4块光伏电池组件串联组成,照度计安装在光伏电池方阵中央。
3盏300W的投射灯安装在丝杠支架上。
当电动机旋转时,通过减速箱驱动丝杠做直线运动。
丝杠两端与模拟光源连接部分安装了限位开关,用于模拟光源位置的限位和保护。
水平和俯仰方向运动机构由水平运动和俯仰运动直流电动机、接近开关和微动开关组成。
水平运动和俯仰运动直流电动机旋转时,水平运动减速箱驱动光伏电池方阵作向东方向或向西方向的水平移动、俯仰运动减速箱驱动光伏电池方阵作向北方向或向南方向的俯仰移动,接近开关和微动开关用于光伏电池方阵位置的限位和保护。
(2)光伏发电系统组成部分太阳能电池发电系统是利用以光生伏打效应原理制成的太阳能电池将太阳辐射能直接转换成电能的发电系统。
郑州大学风光互补发电系统实验手册 -SY10.

实验10逆变原理实验一、实验目的1.了解光伏并网逆变电路原理。
2.熟练掌握逆变原理实验的操作步骤。
二、实验仪器:序号名称备注1储能系统实验科研平台已配好2室外光伏电池板配电柜实验科研平台已配好3控制系统实验科研平台已配好4风源控制系统用于室外光伏电池板配电柜接线板取电5并网逆变系统实验科研平台已配好三、原理与说明并网逆变器前级加BOOST升压斩波电路的拓扑结构【5,6】,并通过控制BOOST电路的占空比有效跟踪风力发电机的最大功率。
在分析并网逆变器控制系统的同时采用MATLAB根轨迹图解的仿真方法进行调节器设计【7,8】,从而使系统获得了良好的动、静态特性,满足了高效、可靠发电的要求。
系统的组成:图10-1系统采用电压型H桥并网逆变器进行并网电流控制。
考虑到电机的绕组隔离特性,本系统在交流输出侧直接并网,而不需要变压器隔离。
因此采用交-直-交电能变换实现本系统的并网功能。
通过BOOST升压斩波电路得到并网逆变器要求的直流母线电压。
为了满足电压型并网逆变器的工作条件,即直流侧电压至少要达到电网电压的峰值,在H桥并网逆变器的直流侧前级加BOOST斩波升压电路。
系统的拓扑如图10-1。
控制原理H桥PWM并网逆变器是具有电流控制特性的电压型逆变器。
通过对交流并网侧电感电流的控制来实现电能的单位功率因数并网运行。
根据图1,H桥交流侧电路方程是:其中v ab、e、i ac、L2、p、v c2分别为交流斩波电压、电网电压、交流电流,交流电感、微分算子、直流母线电压。
S为开关函数:由式(1),易得显然,公式表明,系统可通过控制开关函数S的PWM调制来实现交流电流的并网控制。
为了实现并网逆变器网侧电流的单位功率因数控制,同时稳定直流母线侧电压,这里采用双闭环控制结构。
其中,电流内环进行正弦电流的跟踪控制;而电压外环稳定直流母线电压。
整个并网逆变器的控制结构如图10-2图10-2电流内环设计并网逆变器的电流内环需要有快速的电流跟踪特性,以保证单位功率因数正弦波电流的输出。
KNT-WP01型 风光互补发电实训系统1
风光互补发电实训系统技术方案南京康尼科技实业有限公司2013年2月26日第一部分:技术参数KNT-WP01型风光互补发电实训系统概述2013年全国职业院校技能大赛高职组“风光互补发电系统安装与调试”赛项使用的大赛设备是由南京康尼科技实业有限公司研发生产的产品“KNT-WP01型风光互补发电实训系统”。
设备组成KNT-WP01型风光互补发电实训系统主要由光伏供电装置、光伏供电系统、风力供电装置、风力供电系统、逆变与负载系统、监控系统组成,如图1所示。
KNT-WP01型风光互补发电实训系统采用模块式结构,各装置和系统具有独立的功能,可以组合成光伏发电实训系统、风力发电实训系统。
(1)、设备尺寸:光伏供电装置1610×1010×1550mm风力供电装置1578×1950×1540mm实训柜3200×650×2000mm(2)、比赛场地面积:20平方米图1 KNT-WP01型风光互补发电实训系统各单元介绍1、光伏供电装置(1)、光伏供电装置的组成光伏供电装置主要由光伏电池组件、投射灯、光线传感器、光线传感器控制盒、水平方向和俯仰方向运动机构、摆杆、摆杆减速箱、摆杆支架、单相交流电动机、电容器、直流电动机、接近开关、微动开关、底座支架等设备与器件组成,如图2所示。
图2 光伏供电装置4块光伏电池组件并联组成光伏电池方阵,光线传感器安装在光伏电池方阵中央。
2盏300W的投射灯安装在摆杆支架上,摆杆底端与减速箱输出端连接,减速箱输入端连接单相交流电动机。
电动机旋转时,通过减速箱驱动摆杆作圆周摆动。
摆杆底端与底座支架连接部分安装了接近开关和微动开关,用于摆杆位置的限位和保护。
水平和俯仰方向运动机构由水平运动减速箱、俯仰运动减速箱、直流电动机、接近开关和微动开关组成。
直流电动机旋转时,水平运动减速箱驱动光伏电池方阵作向东方向或向西方向的水平移动、俯仰运动减速箱驱动光伏电池方阵作向北方向或向南方向的俯仰移动,接近开关和微动开关用于光伏电池方阵位置的限位和保护。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风光互补发电实训系统实训方案KNT-WP01型风光互补发电实训系统主要由光伏供电装置、光伏供电系统、风力供电装置、风力供电系统、逆变与负载系统、监控系统组成,如图1所示。
KNT-WP01型风光互补发电实训系统采用模块式结构,各装置和系统具有独立的功能,可以组合成光伏发电实训系统、风力发电实训系统。
一、各单元介绍1、光伏供电装置(1)、光伏供电装置的组成光伏供电装置主要由光伏电池组件、投射灯、光线传感器、光线传感器控制盒、水平方向和俯仰方向运动机构、摆杆、摆杆减速箱、摆杆支架、单相交流电动机、电容器、直流电动机、接近开关、微动开关、底座支架等设备与器件组成,如图2所示。
4块光伏电池组件并联组成光伏电池方阵,光线传感器安装在光伏电池方阵中央。
2盏300W的投射灯安装在摆杆支架上,摆杆底端与减速箱输出端连接,减速箱输入端连接单相交流电动机。
电动机旋转时,通过减速箱驱动摆杆作圆周摆动。
摆杆底端与底座支架连接部分安装了接近开关和微动开关,用于摆杆位置的限位和保护。
水平和俯仰方向运动机构由水平运动减速箱、俯仰运动减速箱、直流电动机、接近开关和微动开关组成。
直流电动机旋转时,水平运动减速箱驱动光伏电池方阵作向东方向或向西方向的水平移动、俯仰运动减速箱驱动光伏电池方阵作向北方向或向南方向的俯仰移动,接近开关和微动开关用于光伏电池方阵位置的限位和保护。
(2)、光伏电池组件光伏电池组件的主要参数为:额定功率 20W额定电压 17.2V额定电流 1.17A开路电压 21.4V短路电流 1.27A尺寸 430mm×430mm×28mm2、光伏供电系统(1)、光伏供电系统的组成光伏供电系统主要由光伏电源控制单元、光伏输出显示单元、触摸屏、光伏供电控制单元、充/放电控制单元、信号处理单元、西门子S7-200PLC、继电器组、接线排、蓄电池组、可调电阻、断路器、12V开关电源、网孔架等组成。
如图3所示。
(2)、控制方式光伏供电控制单元的追日功能有手动控制盒自动控制两个状态,可以进行手动或自动运行光伏电池组件双轴跟踪、灯状态、灯运动操作。
(3)、充、放电控制单元和信号处理单元蓄电池的充电过程及充电保护由充电控制单元、信号处理单元及程序完成,蓄电池的放电保护由放电控制单元、信号处理单元完成,当蓄电池放电电压低于规定值,放电控制单元输出信号驱动继电器工作,继电器常闭触点断开,切断蓄电池的放电回路。
(3)、蓄电池组蓄电池组选用4节阀控密封式铅酸蓄电池,主要参数:容量 12V 18Ah/20HR重量 1.9kg尺寸 345mm×195mm×20mm3、风力供电装置(1)、风力供电装置的组成风力供电装置主要由叶片、轮毂、发电机、机舱、尾舵、侧风偏航控制机构、直流电动机、塔架和基础、测速仪、测速仪支架、轴流风机、轴流风机支架、轴流风机框罩、单相交流电动机、电容器、风场运动机构箱、护栏、连杆、滚轮、万向轮、微动开关和接近开关等设备与器件组成,如图3所示。
叶片、轮毂、发电机、机舱、尾舵和侧风偏航控制机构组装成水平轴永磁同步风力发电机,安装在塔架上。
风场由轴流风机、轴流风机支架、轴流风机框罩、测速仪、测速仪支架、风场运动机构箱体、传动齿轮链机构、单相交流电动机、滚轮和万向轮等组成。
轴流风机和轴流风机框罩安装在风场运动机构箱体上部,传动齿轮链机构、单相交流电动机、滚轮和万向轮组成风场运动机构。
当风场运动机构中的单相交流电动机旋转时,传动齿轮链机构带动滚轮转动,风场运动机构箱体围绕风力发电机的塔架作圆周旋转运动,当轴流风机输送可变风量风时,在风力发电机周围形成风向和风速可变的风场。
在可变风场中,风力发电机利用尾舵实现被动偏航迎风,使风力发电机输出最大电能。
测速仪检测风场的风量,当风场的风量超过安全值时,侧风偏航控制机构动作,使尾舵侧风45º,风力发电机叶片转速变慢。
当风场的风量过大时,尾舵侧风90º,风力发电机处于制动状态。
4、风力供电系统(1)、风力供电系统的组成风力供电系统主要由风电电源控制单元、风电输出显示单元、触摸屏、风力供电控制单元、充/放电控制单元、信号处理单元、西门子S7-200PLC、继电器组、接线排、可调电阻、断路器、网孔架等组成。
(2)、控制方式风力供电控制单元的偏航功能有手动和自动两个状态,可以进行手动或自动可变风向操作。
可变风量是由变频器控制轴流风机实现。
手动操作变频器操作面板上的有关按键,使变频器的输出频率在0-50Hz之间变化,轴流风机转速在0至额定转速范围内变化,实现可变风量输出。
(3)、充、放电控制单元和信号处理单元蓄电池的充电过程及充电保护由充电控制单元、信号处理单元及程序完成,蓄电池的放电保护由放电控制单元、信号处理单元完成,当蓄电池放电电压低于规定值,放电控制单元输出信号驱动继电器工作,继电器常闭触点断开,切断蓄电池的放电回路。
(4)、测风偏航风力发电机风轮叶片在气流作用下产生力矩驱动风轮转动,通过轮毂将扭矩输入到传动系统。
当风速增加超过额定风速时,风力发电机风轮转速过快,发电机可能因超负荷而烧毁。
对于定桨距风轮,当风速增加超过额定风速时,如果气流与叶片分离,风轮叶片将处于“失速”状态,风力发电机不会因超负荷而烧毁。
对于变桨距风轮,当风速增加时,可根据风速的变化调整气流对叶片的攻角。
当风速超过额定风速时,输出功率可稳定地保持在额定功率上。
特别是在大风的情况下,风力机处于顺桨状态,使桨叶和整机的受力状况大为改善。
小型风力发电机多数是定桨距风轮,在大风的情况下,采用侧风偏航控制使气流与叶片分离,使风轮叶片处于“失速”状态,安全地保护风力发电机。
另外,还可以通过侧风偏航控制风力发电机保持恒定功率输出。
5、逆变与负载系统(1)、逆变与负载系统的组成逆变与负载系统主要由逆变电源控制单元、逆变输出显示单元、逆变控制单元、直流升压单元、全桥逆变单元、逆变器参数检测模块、变频器、三相交流电机、发光管舞台灯光模块、警示灯、接线排、断路器、网孔架等组成。
1)、逆变电源控制单元逆变电源控制单元主要由断路器、+24V开关电源、AC220V电源插座、指示灯、接线端子DT14和DT15等组成。
2)、逆变输出显示单元逆变输出显示单元主要由交流电流表、交流电压表、接线端子DT16和DT17等组成。
3)、逆变与负载系统主电路逆变与负载系统主要由逆变器、交流调速系统、逆变器测试模块、发光管舞台灯光模块和警示灯组成。
逆变器的输入由光伏发电系统、风力发电系统或蓄电池提供,逆变器输出单相220V、50Hz的交流电源。
交流调速系统由变频器和三相交流电动机组成,逆变器的输出AC220V电源是变频器的输入电源,变频器将单相AC220V变换为三相AC220V供三相交流电动机使用。
逆变电源控制单元的AC220V电源由逆变器提供,逆变电源控制单元输出的DC24V供发光管舞台灯光模块使用。
逆变器测试模块用于检测逆变器的死区、基波、SPWM波形。
(2)、逆变装置逆变器是将低压直流电源变换成高压交流电源的装置,逆变器的种类很多, 各自的具体工作原理、工作过程不尽相同。
本实训装置使用的逆变装置由DC-DC升压单元、逆变控制单元、全桥逆变单元组成,逆变的工作过程是将蓄电池的12V直流电通过DC-DC和DC-AC 变换,转变成正弦波220/50Hz(可调)的工频交流电。
本逆变器有很多优点,升压部分由SG3525驱动两个升压MOS管,SG3525脉宽调试控制器,不仅具有可调整的死区时间控制功能,而且还具有可编程式软启动,脉冲控制锁保护等功能。
全桥逆变部分采用具有DSP性能的嵌入式微处理器TMS320F2812实现SPWM的调制,同时能够与上位机的远程通讯,实现数据的上载与下载等功能。
6、监控系统(1)、监控系统组成监控系统主要由一体机、键盘、鼠标、接线排、电源插座、通信线、微软操作系统软件、力控组态软件组成。
(2)、监控系统功能4)、通信监控系统与光伏充、放电控制器,风能充、放电控制器,逆变控制器、仪表、PLC、变频器通信。
5)、界面①、监控系统具有主界面,光伏供电系统界面,风力供电系统界面,逆变与负载系统界面,风光互补能量转换界面,分别显示各自的运行状态参数。
②、光伏供电系统界面设置相应的按钮,实现光伏电池方阵自动跟踪。
③、风力供电系统界面设置相应的按钮,实现风力发电单元变频器控制和测风偏航控制。
④、具有光伏发电采集报表和风力发电集报表,记录光伏输出电压、电流,风力发电机的输出电压、电流;逆变与负载系统的逆变输出电压、电流、功率等数据并打印数据报表。
二、主要实验实训内容1)、单晶硅光伏电池单体的工作原理实验2)、太阳能电池组件方阵设计实验3)、光伏供电装置的组成与控制实验4)、PLC编程手动、自动控制光伏电池追踪太阳实验5)、光敏电阻、电压比较器的工作特性实验6)、光线传感器工作原理实验7)、光伏供电系统电气控制原理设计8)、光伏电池的I-U特性测试实验9)、光伏电池的输出功率特性实验10)、DSP控制器对蓄电池的脉宽调制充电过程实验11)、DSP控制器对蓄电池的放电保护实验12)、蓄电池实际充电检测实验13)、蓄电池模拟充电实验14)、水平轴永磁同步风力发电机的组成安装实验15)、模拟风场的设计与搭建实验16)、风力发电机被动偏航与主动偏航原理实验17)、水平轴永磁同步风力发电机被动偏航中侧风偏航机构设计18)、风力供电系统的组成及工作原理19)、可变风向和可变风量控制实验20)、风力供电系统电气控制原理实验21)、风力发电机偏航手动、自动控制方式实验22)、风力发电机输出特性测试23)、逆变器工作原理实验24)、SG3525实验25)、逆变器基波、SPWM、死区等波形检测实验26)、上位机下载逆变几波频率、死去时间、调制比等参数实验27)、逆变器不同负载设计连接实验28)、上位机与各单元通信方式与连接实验29)、通信协议设定实验30)、三维组态力控软件的应用实验31)、力控软件的基本开发流程实验风力发电机组虚拟仿真系统实训方案1仿真系统总体结构仿真系统软件包括计算机操作系统软件、仿真支撑系统平台软件、仿真模型软件、3D 虚拟现实仿真软件、教练员功能软件、虚拟平台软件、电网计算分析软件、网络I/O通讯软件、音响仿真软件、一次设备三维交互式虚拟场景系统软件、远程仿真教学管理软件等;要求各软件开放性好,易于员工的后期开发与维护。
2.仿真范围2.1 仿真对象按物理原理建立风力发电场模型,仿真风力发电场的静态特性和动态特性,及其对电网的影响。
仿真其并网和调节方式。
仿真其实际控制功能,控制策略和运行。
风力发电场仿真范围为主设备及重要辅助设备,包括风电发变机组、母线系统、升压变电站、风电发电机组并网系统(含变流器控制)、控制系统、偏航系统、监控系统、继电保护系统、PLC安全自动装置系统、变桨系统、齿轮箱及传动系统、液压控制系统、安全链系统、润滑油系统、风机制动、润滑油系统、箱式变电站、场用电系统、AGC/AVC、SVG无功补偿装置等系统。