激光传感器在车辆宽高超限检测中的应用
基于激光雷达三维成像技术的运煤列车车辆超偏载检测系统的设计与实现

基于激光雷达三维成像技术的运煤列车车辆超偏载检测系统的设计与实现摘要本系统通过激光雷达三维成像技术实现动态测定所通过车辆的重量,判别车辆是否存在超过额定载重以及装载不平衡现象。
系统可以方便、准确、有效、及时地检测列车超偏载问题,极大限度地预防此类事故的发生,对铁路煤炭运输有着较大的意义关键词列车;超偏载;系统;设计中图分类号u27 文献标识码a 文章编号 1674-6708(2013)96-0214-021绪论1.1 运煤列车车辆超偏载检测的目的及意义铁路行车安全是铁路运输工作的重中之重,铁路部门将防止货物“三重一超两脱一开”(超重、偏重、集重;超限;货物脱落、蓬布脱落;车门开放)作为确保行车安全的重要工作常抓不懈。
多年来,煤炭生产和运输部门在提高煤炭质量、解决运输亏吨方面做了不少工作,取得了一定成绩,但问题仍未得到根本解决,主要是:1)煤炭中杂质较多、使港口接卸时常发生损机停产事故,影响到港煤炭及时中转外运;出口煤炭杂质多,还影响了国际声誉;2)煤炭计量手段落后,执行又不够认真,经常出现装载亏吨,造成运力的浪费和用户的经济损失;3)煤炭装载偏载问题。
包括左右偏载、前后偏载;而由于货运列车因为超、偏载而引起断轴、切轴、爬轨和列车颠覆事故时有发生,引起的事故骇人听闻,极大地影响着铁路运输的安全和铁路的整体形象。
超偏载近年来成为影响铁路行车安全的重要因素。
如果能方便、准确、有效、及时地检测列车超偏载问题,便可极大限度地预防此类事故的发生,因此铁路车辆超、偏载检测对铁路运输有着极其重大的意义。
在煤炭装卸过程中存在以下问题:(1)卸载不完全;车厢内影响容积的其它异物;(2)煤炭装载偏载问题。
包括左右偏载、前后偏载;(3)超载和欠载问题。
因此急需一套展示装载效果的监测系统。
1.2 超偏载检测技术的研究现状与发展趋势目前,对于卸载不完全、装载偏载问题,常用的的方法就是在装车过程中,派专职人员目测检查,既费工又费时。
浅议不停车超限检测系统

浅议不停车超限检测系统不停车超限检测系统是一种用于检测行驶中超限车辆的设备或系统。
它能够通过智能化技术及相关传感器来实时监测道路上行驶的车辆是否超过了法定限高、限宽和限重等限制。
一旦发现超限车辆,该系统会立即发出警报,并通知相关部门进行处理。
不停车超限检测系统有着广泛的应用领域,其中包括高速公路、城市道路、桥梁、隧道以及货运站等。
它的主要作用是提高公路运输安全和保护道路基础设施的完整性。
对于行驶的车辆而言,不停车超限检测系统能够提前警示超限,避免事故发生。
对于道路基础设施来说,它能够保护桥梁、隧道等结构不受超限车辆损坏。
不停车超限检测系统的工作原理一般分为三个步骤:感应、识别和报警。
通过安装在道路上的传感器来感应车辆的高度、宽度和重量等信息。
这些传感器一般包括激光雷达、摄像头、车载传感器等。
然后,通过图像处理或者其他相关技术,将感应到的车辆信息进行识别和分析。
当识别出超限车辆时,系统会发出声光警报,并将相关信息传输给后台系统或警察等相关人员。
不停车超限检测系统的优点主要有以下几个方面。
它能够实现实时监测,及时发现超限车辆,避免交通事故的发生。
这种系统可以减轻交通管理部门的工作负担,提高效率。
不停车超限检测系统可以降低超限车辆对道路基础设施的损坏程度,减少维修和修复成本。
该系统还可以记录每一辆通过的车辆信息,用于交通管理和数据统计等方面的应用。
不停车超限检测系统也存在一些挑战和问题。
技术方面面临一些困难,例如车辆的高度、宽度等信息需要准确感知和识别,而且不同地域和环境的道路条件也会对系统的准确性产生影响。
系统的投入和维护成本较高,需要配备一定数量的传感器和设备,并建立完善的后台管理系统。
还需要与交通管理部门和相关机构进行有效的联动和合作,才能实现该系统的全面应用。
不停车超限检测系统是一种重要的交通安全设备,在提高公路运输安全和道路基础设施保护方面有着重要作用。
尽管面临一些技术和实践上的挑战,但随着智能化技术的不断发展和应用,相信不停车超限检测系统会在未来得到更广泛的应用和发展。
《基于多传感器信息融合的超限超载检测系统设计研究》范文
《基于多传感器信息融合的超限超载检测系统设计研究》篇一一、引言随着交通运输行业的迅猛发展,货车超限超载问题愈发突出,成为制约公路交通安全与正常运行的瓶颈之一。
针对此问题,本研究提出了基于多传感器信息融合的超限超载检测系统设计。
该系统能够实时、准确地监测车辆超限超载情况,有效提高公路运输的安全性和效率。
二、系统设计概述本系统设计以多传感器信息融合技术为核心,通过集成多种传感器设备,实现对车辆载重、尺寸、速度等多方面信息的实时采集与处理。
系统主要由传感器模块、数据处理模块、通信模块和显示模块组成。
三、传感器模块设计传感器模块是本系统的核心组成部分,主要包括重量传感器、尺寸传感器和速度传感器。
1. 重量传感器:通过压力传感技术,实时监测车辆载重情况,将载重信息转换为电信号输出。
2. 尺寸传感器:采用激光测距技术,对车辆的长、宽、高等尺寸进行测量,为超限检测提供依据。
3. 速度传感器:通过雷达或红外技术,实时监测车辆速度,为后续的数据处理提供参考。
四、数据处理模块设计数据处理模块负责接收传感器模块采集的数据,进行滤波、校正和融合处理。
1. 滤波处理:采用数字滤波技术,对原始数据进行去噪处理,提高数据的准确性。
2. 校正处理:通过校准算法,对传感器进行定期校准,确保数据的可靠性。
3. 信息融合:采用多传感器信息融合技术,将不同传感器的数据进行融合处理,提高检测的准确性和稳定性。
五、通信模块设计通信模块负责将处理后的数据传输至显示模块和上位机系统。
本系统采用无线通信技术,实现数据的实时传输。
六、显示模块设计显示模块负责将处理后的数据以直观的方式展示给用户。
本系统采用液晶显示屏,可实时显示车辆载重、尺寸、速度等信息,便于用户了解车辆超限超载情况。
七、系统实现与测试本系统采用模块化设计,便于后期维护和升级。
在系统实现过程中,需进行严格的测试与验证,确保系统的稳定性和准确性。
测试内容包括传感器精度测试、数据处理模块性能测试、通信模块传输测试等。
ifm激光传感器说明书

ifm激光传感器说明书
IFM激光传感器是一种高精度的光学传感器,通过激光束来测量目标物体的距离和位置。
它适用于工业自动化领域,可以广泛应用于物体定位、测距、测量和检测等方面。
IFM激光传感器的主要特点和功能如下:
1. 高精度测量: IFM激光传感器采用高精度的激光束,可以实现精确的距离测量,测量误差较小。
2. 宽测量范围: IFM激光传感器可以在较大的距离范围内进行测量,通常可以测量几米甚至更远的距离。
3. 高速测量: IFM激光传感器具有快速测量的能力,可以实时测量目标物体的位置和移动速度。
4. 多种测量模式: IFM激光传感器可以根据不同的应用需求选择不同的测量模式,如单点测量、连续测量和多点测量等。
5. 稳定可靠: IFM激光传感器采用优质的材料和制造工艺,具有良好的耐用性和稳定性,可以长时间稳定运行。
6. 易于安装和使用: IFM激光传感器通常采用小巧的设计,便于安装在各种设备和机器上,操作简单方便。
总之,IFM激光传感器是一种具有高精度、广泛应用和稳定可
靠的光学传感器,可为工业自动化领域提供精确的测量和检测功能。
车载传感器的技术进步与应用案例

车载传感器的技术进步与应用案例在当今的汽车领域,车载传感器扮演着至关重要的角色,就如同汽车的“眼睛”和“耳朵”,为车辆的安全、舒适和智能化运行提供了关键的支持。
随着技术的不断进步,车载传感器的性能和功能也在日益提升,为汽车行业带来了诸多变革和创新。
车载传感器的种类繁多,常见的包括激光雷达、毫米波雷达、摄像头、超声波传感器等。
这些传感器各有特点和优势,通过相互配合和协同工作,能够实现对车辆周围环境的全面感知和准确判断。
激光雷达是一种高精度的传感器,它通过发射激光束并测量反射光的时间和强度来获取周围环境的三维信息。
其测量精度高、分辨率强,能够精确地识别障碍物的形状和位置。
然而,激光雷达的成本相对较高,且在恶劣天气条件下的性能可能会受到一定影响。
毫米波雷达则具有较好的穿透能力和不受天气影响的优点。
它能够在雨、雾、雪等恶劣天气中正常工作,对远距离和高速移动的目标有较好的检测能力。
但毫米波雷达的分辨率相对较低,对于一些细小物体的识别能力有限。
摄像头是车载传感器中最直观的一种,它能够提供丰富的图像信息。
通过图像处理技术,可以识别交通标志、车道线、行人等。
不过,摄像头在低光照条件下的性能会有所下降,并且容易受到光照变化和物体遮挡的影响。
超声波传感器则主要用于短距离的障碍物检测,如倒车雷达。
它成本低、易于安装,但检测范围和精度相对较小。
近年来,车载传感器的技术进步主要体现在以下几个方面。
首先是传感器的精度和分辨率不断提高。
例如,新型的激光雷达能够实现更高的点云密度和更精确的距离测量,为自动驾驶提供更可靠的环境感知。
其次,传感器的融合技术得到了快速发展。
通过将多种传感器的数据进行融合和互补,可以提高系统的可靠性和准确性,降低误判率。
此外,传感器的小型化和集成化也是一个重要趋势,这有助于减少传感器对车辆空间的占用,降低成本,并提高安装的便利性。
在实际应用中,车载传感器发挥着重要的作用。
以自动驾驶为例,传感器的精准感知是实现自动驾驶的基础。
激光式宽高仪在高速公路超限检测中的应用

激光式宽高仪在高速公路超限检测中的应用李靖博【摘要】加强高速公路入口检测管理一直是国家治理车辆超载超限的重点.针对车辆的超宽超高检测,主要探讨基于激光式测距的宽高仪在高速公路入口治超检测中的应用.通过选用LMS111型激光传感器、宽高仪数据处理器和检测车道控制器,组建成一套完整的宽高仪检测系统.系统利用激光反射测距的原理,可以准确测量出车辆的宽度和高度信息.经实践检验证明,检测数据准确,系统运行稳定,能有效遏制超限车辆的驶入.不仅提高了治超的工作效率,而且为车辆在高速公路的正常通行提供了保障,具有良好的应用前景和推广价值.【期刊名称】《山西交通科技》【年(卷),期】2017(000)006【总页数】3页(P106-108)【关键词】激光;宽高仪;超限检测;应用【作者】李靖博【作者单位】山西省交通科学研究院,山西太原 030006【正文语种】中文【中图分类】U492.8自2004年在全国范围内集中开展车辆超限超载治理工作至今已有13年的时间。
通过深入持续的综合治理,高速公路车辆超载率已稳定控制在1%以下[1],基本消除了高速公路超载的现象。
但针对车辆尺寸的超限检测,大多停留在通过人工肉眼识别或安装限高杆的方法,不仅效率低下,影响车辆放行速度[2],而且精度欠佳,安全性难以保障。
一旦超宽超高车辆驶入高速公路,极有可能损坏公路的基础设施,缩短公路的使用寿命,同时影响自身和其他车辆的正常通行,给交通安全带来极大的事故隐患,甚至酿成惨烈的交通事故[3]。
针对车辆超宽超高的问题,在高速公路入口治超检测系统中引入激光式宽高仪,通过激光扫描测距的方法,实现不停车自动检测出车辆的宽度和高度信息,并上传显示在治超管理平台,方便治超人员劝返违法车辆,为高速过往车辆提供安全、高效的出行条件服务。
1 系统组成激光式宽高仪检测系统由激光传感器、宽高仪数据处理器、检测车道控制器和上位机超限检测软件组成。
系统构成如图1所示。
1.1 激光传感器宽高仪采用激光测距的方法对车辆的宽高进行检测,相比超声波测距和红外测距、激光测距方向性好、具有更高的精度和速度、测量距离也最远,已广泛应用于汽车防撞、建筑或空地安全监护、轨道交通、海关等领域[4]。
基于激光测距的高速公路车辆宽高检测系统

本 系统 的硬件 设计主 要包括 激光 扫描器 的选 型、嵌 入式工控机 的软硬件需求分析及系统间通信方式设计 。 2.1激光 扫描器 的选型
本 系统 根据 高速 公路 超限检 测站 的工作 条件对 激光 扫描 器进行 选型 ,采 用SICK AG公司 的脉 冲激光 测距扫 描仪LMS.1XX。激 光扫描器放置 在车道 中心线 距地面约 6m的位 置 ,采用 成 熟 的激 光.时间飞 行原 理 ,加入 先进 的多次 回波 检测 技术 ,通过非 接触 式脉冲激 光测 距 ,将 扫描 产生 的距 离信息 转化为车 辆 宽高尺寸 。检测 高度为 1.2m~6m;检测宽度为 1.5m ̄5m;测 量距离最大 18m;扫 描角度最大270。;工作频率有25Hz和5Hz两种 ;设备测量 误差 <0.4%;工作 电压为24V DC;防护等 级达 ̄t jlP67, 满足 高速 公路 治超站 露天使用要求 。 2.2 嵌入式工控机的软硬件需求
ELECTRONICS WORLD ·探 索 s 观 察
基 于 激 光 测 距 的
山西省 自动化 研 究 所 赵金 婵
【摘要 】本文基 于激光测距技 术设计 了一种 高速公路 车辆 宽高检 测 系统 。该 系统 由激光扫描 器 、嵌入 式工控 机及上 位 机软件 构成 ,实现 了车辆 宽高尺寸 的不停 车检测 。经现 场测试 ,系统具有测 量精度 高、速度 快 、误差 小等优 点 ,可以 取代传统人 工测 量 ,提 升高速 公路 治超工作 的 自动化与信 息化水平。 【关键词 】激光 测距 ;公路超 限治理 ;车辆宽 高检 测
基金项 目:2015年度 山西省科技 攻关项 目 “基于轮廓 检测的绿通车智能识别 系统” (项 目编号 :2015031005)。
基于激光测距技术的车辆宽高检测系统的设计
De i n o t c i g s se o h dt nd heg f a o o ie sg fde e tn y t m f r t e wi h a i hto ut m b l s ba e o a e a i g t c no o y s d n l r r ng n e h l g s
第 1 9卷 第 1 0期
Vo .9 11
电 子 设 计 工 程
Elc r n c De in g n e i g e to i sg En i e rn
2 1 年 5月 01
M a 01 v2 1
No 1 .0
基 于激光测距技 术的车辆宽 高检 测 系统 的设计
随 着 我 国经 济 的 快 速 发 展 , 速公 路 建 设 和 公 路 运 输 规 高
测 系 统 测 量 速 度 快 , 量 精 度 高 的要 求 , 考 虑 到 系 统 能 在 测 还
模 都 得 到 了 前所 未有 的 发 展 , 此 带 来 的 车 辆 超 限超 载 现 象 由
也 日益 严 重 。超 限 运 输 一 方 面 会 缩 短 公 路 和 桥 梁 的 使 用 寿
3 + 0℃的 环境 中翻 0~ 5 。
图 2 系 统 结 构框 图
Fg 2 Blc iga o y tm i, o k da rm fsse
2 系统构 成 及 工 作 原 理
智 能 车辆 宽 高 检 测 系统 通 过 对 车 辆 进 行 连 续 动 态 扫 描 ,
C d x M3内核 的 L S 9 2处 理 器 作 为控 制 核 心 , 功 能 可 o e— M3 8 6 按 划 分 为 以 下 模 块 : 源模 块 , 控 制 器 模 块 、 电 主 时钟 模 块 、 据 数 通 讯 模 块 、 盘 输 人 模 块 、 晶显 示 模 块 、 电 器 控 制 模 块 键 液 继 等. 以下 对 3个 部 分 作 较详 细介 绍 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 图 分 类号 : P 7 T 23
文 献标 识 码 : A
文 章 编 号 :17— 26 2 1 )0 0 8- 3 6 4 6 3 (0 1 1- 0 6 0
App ia i n o ule l s r m e s r ng s n o tt e s e lc to fp s a e a u i e s r a he m a ur me ts s e n y t m
tc n l g .h ss se c n ta se n rc s o er a- med t r u h VB n t o k k r e n P At es let e h oo y i y t m a n f r d p o e s h s e l i a at o g e w r e n lo C. R me t i T r a t t h h t n i ,hs s se i c u e tr c f o t l n p r t n o . e ts aa h e x e me t t n id c tst a i s se i y t m l d sa i e f eo n r d o e ai nPC T t ts e t n e p r na i n iae h t h s y tm n n n a c oa o h e d i i o t s
o h dt n i hto o i g v hil ft e wi h a d he g fm v n e c e
U i o g X N u-a L i — n L— n , I G G i i , I a l h j X oi
( oeeo nom t nE g er g Ti a n esyo ehooy Ti a 30 4 C i ) C lg fr ai ni ei , a un U i ri l fI o n n y v t fTc nl , a un0 02 , hn g y a
速 测 量 . 用 P 工控 机 和 可视 化 编程 软 件 VB的 网络 内核 与 传 感 器进 行 数 据 的 实 时 传输 及 处理 , 时还 设 计 ቤተ መጻሕፍቲ ባይዱ界 面 利 C 同
友 好 的 上 位 机控 制 软 件 。 现 场试 验 数 据 表 明 , 系统 实时性 好 、 量精 度 高 , 该 测 具有 一 定 的 实用 价值 。
Ab ta t o i ce s f ce c n d c h n e st f w r n o a h e e t e a tma in o v l n d tci n h sr c :T n r a e ef i n y a d r u e te i tn i o o k a d t c i v h u o t fo e u e e t ,t e i e y o T o me s rme ts s m ft e w d h a d h i h s d s n d T i s se u e D l s rp le r n ef d n e s r f S C a u e n y t o i t n e g ti e i e . h s y t m s s 2- a e u s a g - n ig s n o so I K e h g i C mp n n Ge ma o me s r h d h a d te h ih f d n mi v h ce h s k n f s n o d p s d u l u s o a y i r n t a u e t e w t n h eg to y a c e il.T i i d o e s r a o t o b e p le i
ra - me pr iin a d a u b e e lt , ecso n v l a l. i
Ke r s a e a u e n :s n o ;d u l— u s e h oo y;V o e y wo d :1s rme s r me t e s r o b e p l t c n lg e B c r
第 1 第 l 9卷 0期
Vo .9 11
NO 1 .0
电 子 设 计 工 程
El cr n c De in En i e rng e to i sg g n e i
21 0 1年 5月
Ma 01 y2 1
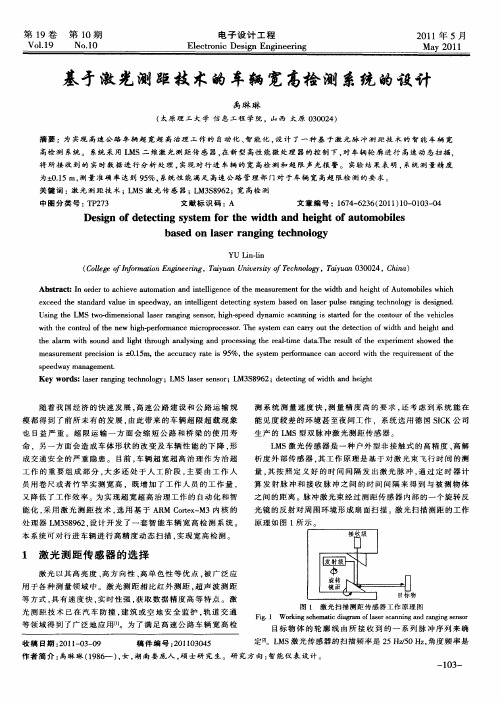
激 光传感器在车辆 宽高超 限检 测 中的应 用
李 丽宏 , 邢桂 甲, 李晓林
( 原理 工 大 学 信 息 工程 学 院 , 西 太 原 0 0 2 太 山 3 0 4)
摘 要 :为 了提 高超 限检 测 工作 的效 率 、减 轻 超 限 工 作 人 员 的工 作 强 度 , 实现 超 限 检 测 的 自动 化 ,设 计 了采 用 德 国 SC 公 司 具有 双 脉 冲技 术 的 二 维激 光 脉 冲 测距 传感 器的 智 能 对 动 态车 辆 的 宽 高检 测 系统 。 采 用 激 光 传 感 器进 行 快 IK
现代仪器 仪表的智能化趋 势使得各 种传感 器的应用 日
益 广 泛 。 由 于 激 光 具 有 许 多 优 点 , 得 利 用 这 些 特 性 研 发 的 使
是 红外 或可 见 光 )波 束 被 目标 表 面 反 射 产 生 回波信 号 。回波 ,
信 号 中直 接 或 间 接 地包 含 待 测 信 息 。接 收 与信 号 处 理 系 统通