计算机仿真实验
《计算机仿真》
一、实验目的1.学习MATLAB 的基本矩阵运算; 2.学习MATLAB 的点运算; 3.学习复杂运算。
二、实验基本知识1.基本矩阵运算;2.多项式运算;3.代数方程组;4.数值微积分。
5.plot(x,y)——绘制由x,y 所确定的曲线;6.图形窗口的分割;7.图形编辑窗口的使用。
三、实验内容1.给a,b,c 赋如下数据:]6,46,23,4,2,6,3,8,0,1[,3568382412487,278744125431-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=c b a 1)求a+b,a*b,a.*b,a/b,a./b,a^2,a.^2的结果.执行M 文件:%%%%%%%%%clc;clear all;close all; a=[1 3 4;5 12 44;7 8 27]; b=[-7 8 4;12 24 38;68 -5 3]; c=[1,0,8,3,6,2,-4,23,46,6]; a+b a*b a.*b a/b a./ba^2 a.^2%%%%%%%%% 获得结果为:ans =-6 11 817 36 8275 3 30ans =301 60 1303101 108 6081883 113 413 ans =-7 24 1660 288 1672476 -40 81 ans =0.0966 0.0945 0.0080-3.6125 1.5838 -0.5778-1.9917 0.9414 -0.2682ans =-0.1429 0.3750 1.00000.4167 0.5000 1.15790.1029 -1.6000 9.0000ans =44 71 244373 511 1736236 333 1109 ans =1 9 1625 144 193649 64 729 2)求c中所有元素的平均值、最大值.%%%%%%% ave=mean(c) Max=max(c) %%%%%%% 执行结果为:ave =9.1000 Max = 463)求d=b(2:3,[1,3]).执行M 文件为:%%%%%% d=b(2:3,[1,3]) %%%%%% 执行结果为:d =12 38 68 3 2.求解方程⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡001987654321X 。
计算机仿真实验报告-实验三
一、实验内容:实验三 利用欧拉法、梯形数法和二阶显式Adams 法对RLC 串联电路的仿真1前向欧拉法状态方程:Du CX y Bu AX X m +=+=+•1 然后根据前向欧拉法(其中h 为步长)•++=m m m hX X X 1即可得到系统的差分方程2后向欧拉法根据前向欧拉法得到的系统状态方程,结合后向欧拉法(其中h 为步长)•+++=11m m m hX X X 即可得到系统的差分方程3梯形法由前面的系统状态方程,结合梯形法)(211+••+++=m m m m X X h X X 即可得到系统的差分方程4二阶显式Adams 方法由前面的状态方程,结合二阶显式Adams 方法)51623(12211--++-+=m m m m m F F F h X X 即可得到系统的差分方程但是二阶显式Adams 法不能自起步,要使方程起步,需要知道开始的三个值,但是我们只知道第一个值。
经过分析后,二阶显式Adams 方法精度是二阶的,而梯形法精度也是二阶的,因此我们可以先借助梯形法得到输出的前三个值,以达到起步的目的,然后借助上面得到的差分方程对其进行求解。
二、实验波形:下图为前向欧拉法、后向欧拉法、梯形法、二阶显式Adams 方法的系统差分方程得到相应的输出波形:图1 h=410 时四种方法的输出波形图2 h=56-⨯时四种方法的输出波形10图3 h=510-时四种方法的输出波形图4 h=610-时四种方法的输出波形三、实验分析:由输出波形可以看到各种方法的特点(在图中蓝色线均表示连续系统模型的实际输出波形,红色线表示在对应方法下系统的输出波形。
):1前向欧拉法和二阶显式Adams方法对步长的要求很强。
步长太大,最后的到的结果不是绝对收敛,而是发散。
在小步长下才显得收敛,这也从另一方面验证,步长越小,截断误差越小;2步长不能太小,太小的步长相应的舍入误差和累积误差也会增大;3前向欧拉法也可称为显式欧拉法,后向欧拉法也可称为隐式欧拉法,可以看到,后向欧拉法的稳定域要比前向欧拉法大,计算精度也要高一些。
武汉理工大学-计算机仿真实验作业答案
五、(10分)已知系统的传递函数为6168682)(232+++++=s s s s s s G 。
语言建立系统传递函数模型,并求:⑴ 该系统的单位阶跃响应;(2分)⑵ 输入函数为u(t)时的响应;(3分)(u(t)正弦信号,周期2秒,仿真时间8秒,采样周期0.1);(3) 输入函数为u(t)时的响应;(3分)(u(t)方波输入信号,周期10秒,仿真时间20秒,采样周期0.05)(4) 绘出系统的波德图(Bode )。
(2分)解答:num=[2 8 6];den=[1 8 16 6];sys=tf(num,den);t=0:0.1:8;y1=step(sys,t);u=sin(t*pi);y2=lsim(sys,u,t);subplot(2,2,1);plot(t,y1);grid;title('阶跃响应曲线');xlabel('响应时间');ylabel('响应值');hold on;subplot(2,2,2);plot(t,y2);grid on ;title('对sin(t)的响应曲线');xlabel('响应时间');ylabel('响应值');t=0:0.05:20u=square(pi/5*t)y3=lsim(sys,u,t);subplot(2,2,3);plot(t,y3)grid on ;title('对方波信号的响应曲线');xlabel('响应时间');ylabel('响应值');subplot(2,2,4);bode(sys);grid ;title('bode 图');运行结果:六、(10分)设二阶动力学系统的传递函数如下,假设将无阻尼固有频率固定为ωn =1 rad/s ,将阻尼比的值分别设置成ζ=0,0.1,0.2,0.3,…,MATLAB 语言编程,分析在这些阻尼比ζ的取值下该系统的阶跃响应。
计算机仿真实验 霍尔效应数据处理
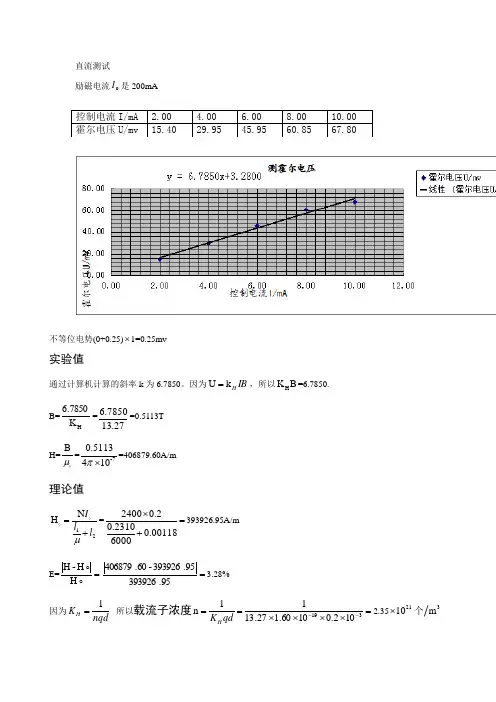
直流测试励磁电流o I 是200mA不等位电势(0+0.25)⨯1=0.25mv实验值通过计算机计算的斜率k 为6.7850。
因为IB H k U =,所以B K H =6.7850. B=H K 7850.6=27.137850.6=0.5113T H= μB =7-1045113.0⨯π=406879.60A/m 理论值21N H l l I +=μ==+⨯00118.060002310.02.024********.95A/m E==H H -H =95.39392695.393926-60.406879 3.28% 因为nqdK H 1= 所以载流子浓度=⨯⨯⨯⨯==--319102.01060.127.1311n qd K H 2.352110⨯3m 个 控制电流I/mA 2.004.00 6.00 8.00 10.00 霍尔电压U/mv 15.4029.95 45.95 60.85 67.80nqu bd I = 所以载流子迁移速率===b IK u H bdnq I =⨯⨯3-10427.1301.033.18m思考题1、若磁场的法线不恰好与霍尔元件片的法线一致,对测量结果会有何影响?如何用实验的方法判断B 与法线是否一致?答:有影响,若磁场方向与霍尔元件有偏角,则只是测的是B θcos ;转动霍尔元件,当霍尔电压达到最大值时,B 与霍尔元件法线一致。
2、若霍尔元件的几何尺寸为4⨯6mm,即控制电流两端距离为6mm ,而电压两端距离为4mm,问此霍尔片能否测量截面积为5⨯5mm 气隙的磁场?答:不可以,因为尺寸为4⨯6mm 的霍尔元件片不能覆盖住截面为5⨯5mm的气隙,这样会有漏磁效应。
3、能否用霍尔元件片测量交变磁场?答:可以,霍尔电压效应的建立需要的时间很短(约在14-12-1010—秒内)。
计算机仿真试验指导书
计算机仿真技术实验指导书1计算机仿真技术实验指导书MATLAB是一种交互式的以矩阵为基本数据结构的系统。
在生成矩阵对象时,不要求明确的维数说明。
所谓交互式,是指MATLAB的草稿纸编程环境。
与C语言或FORTRON语言作科学数值计算的程序设计相比较,利用MATLAB可节省大量的编程时间。
本实验指导书主要讨论四个实验。
实验一信号与系统的时域分析以及信号合成与分解1. 实验目的(1) 连续时间信号的向量表示法和符号运算表示法,典型离散信号表示;(2) 连续信号和离散信号的时域运算与时域变换;(3) 连续系统和离散系统的卷积,以及冲激响应、阶跃响应、单位响应、零状态响应;(4) 周期信号的傅立叶级数分解与综合(以周期方波为例);2. 实验原理与方法(1) 信号在MA TLAB中的表示方法MATLAB用两种方法来表示连续信号,一种是用向量的方法来表示信号,另一种则是符号运算的方法来表示信号。
用适当的MATLAB语句表示出信号后,就可以利用MATLAB的绘图命令绘制出直观的信号时域波形。
向量表示法表示信号的方法是:MATLAB用一个向量表示连续信号的时间范围,另一个向量表示连续信号在该时间范围内的对应样值。
如下列代码p=0.001;t=-pi:p:pi;f=1+cos(t);plot(t,f)title('f(t)=1+cos(t)')xlabel('t')axis([-pi,pi,-0.2,2.4])执行后即可绘制连续信号1+cos(t)的时域波形。
借助于符号运算以及符号绘图函数ezplot,也可以绘制连续信号时域波形。
如下列代码syms tf=sym('1+cos(t)') %定义符号表达式ezplot(f,[-pi,pi]) %绘制符号表达式波形set(gcf,'color','w') %设置当前图形背景颜色为白色执行后即可绘制连续信号1+cos(t)的时域波形。
计算机仿真技术实验报告 实验一 利用替换法构建系统仿真模型实验
计算机仿真技术实验报告实验一 利用替换法构建系统仿真模型实验一.实验目的a) 熟悉MATLAB 的工作环境;b) 掌握在MATLAB 命令窗口调试运行程序;c) 掌握M 文件编写规则及在MATLAB 命令窗口运行程序; d) 掌握利用替换法构造离散模型的方法。
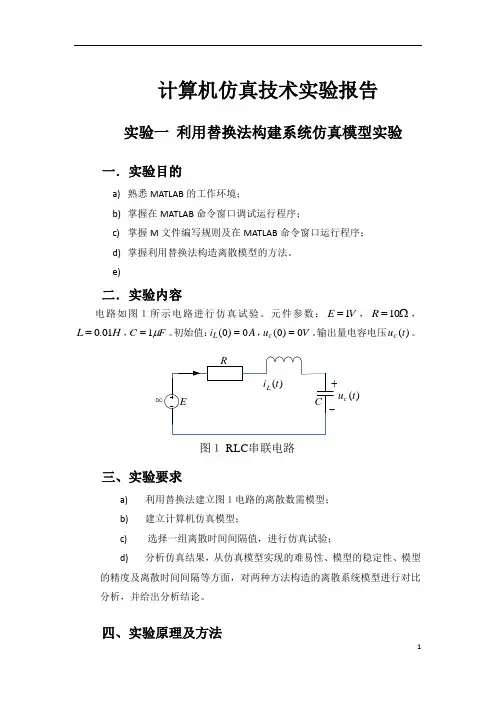
e)二.实验内容电路如图1所示电路进行仿真试验。
元件参数:V E 1=,Ω=10R ,H L 01.0=,F C μ1=。
初始值:A i L 0)0(=,V u c 0)0(=。
输出量电容电压)(t u c 。
DC)(t u c 图1 RLC 串联电路三、实验要求a) 利用替换法建立图1电路的离散数需模型; b)建立计算机仿真模型;c) 选择一组离散时间间隔值,进行仿真试验; d)分析仿真结果,从仿真模型实现的难易性、模型的稳定性、模型的精度及离散时间间隔等方面,对两种方法构造的离散系统模型进行对比分析,并给出分析结论。
四、实验原理及方法系统的数学模型根据计算可知:该连续系统的传递函数为2(s)1(s)(s)1c U G U LCs RCs ==++ 下面对系统的离散仿真模型进行分析:1. 简单替换法由简单替换法计算方法可知,将1z s T-=带入上式得到下面的传递函数方程: 22221()11111()*[2()]*(1())G z LC z RC LC z LC RC T T T T T=+-++- 由此得到该传递函数的差分方程:338282(n 2)(210T)y(n 1)(10T 110T )y(n)10y T +=-++--+2. 双线性替换法根据计算,得到该种方式下的传递函数方程:222222*1()11111[4()2()1]*[28()]*[4()2()1]z z G z LC RC z LC z LC RC T T T T T++=+++-+-+并由此得到差分方程:82823828231(n 2)((8210T )y(n 1)(10T 102T 4)y(n)410T )101024y T T +=-⨯+--⨯++⨯+⨯+五、实验结果根据以上理论编程并得到以下结果:利用简单替换法和双线性替换法仿真数据,依次为采样时间增加的图像。
计算机仿真技术实验报告-实验三
计算机仿真技术实验报告实验三利用数值积分算法的仿真实验实验三 利用数值积分算法的仿真实验一. 实验目的1) 熟悉MATLAB 的工作环境;2) 掌握MATLAB 的 .M 文件编写规则,并在命令窗口调试和运行程序; 3) 掌握利用欧拉法、梯形法、二阶显式Adams 法及四阶龙格库塔法构建系统仿真模型的方法,并对仿真结果进行分析。
二. 实验内容系统电路如图 2.1所示。
电路元件参数:直流电压源V E 1=,电阻Ω=10R ,电感H L 01.0=,电容F C μ1=。
电路元件初始值:电感电流A i L 0)0(=,电容电压V u c 0)0(=。
系统输出量为电容电压)(t u c 。
连续系统输出响应)(t u c 的解析解为:))/sin (cos 1()(ωωωa t t e U t u at s c ⨯+⨯-=- (2-1)其中,LRa 2=,221⎪⎭⎫ ⎝⎛-=L R LC ω。
)(t u c 图2.1 RLC 串联电路三、要求1) 利用欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法构建系统仿真模型,并求出离散系统的输出量响应曲线;2) 对比分析利用欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法构建系统仿真模型的仿真精度与模型运行的稳定性问题; 3) 分别编写欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法的.m 函数文件,并存入磁盘中。
.m 函数文件要求输入参数为系统状态方程的系数矩阵、仿真时间及仿真步长。
编写.m 命令文件,在该命令文件中调用已经编写完成的上述.m 函数文件,完成仿真实验;4) subplot 和plot 函数将输出结果画在同一个窗口中,每个子图加上对应的标题。
四.实验原理(1)连续系统解析解连续系统输出响应)(t u c 的解析解为:))/sin (cos 1()(ωωωx t t e U t u at s c ⨯+⨯-=-其中,LRx 2=,221⎪⎭⎫ ⎝⎛-=L R LCω (2)原系统的传递函数根据所示电路图,我们利用电路原理建立系统的传递函数模型,根据系统的传递函数是在零初始条件下输出量的拉普拉斯变换与输入量的拉普拉斯变换之比,可得该系统的传递函数:LCLs R s LCs E s U s G C /1//1)()()(2++==(3)系统的仿真模型在连续系统的数字仿真算法中,较常用的有欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法等。
计算机仿真技术实验报告 自动化
计算机仿真技术综合实验实验目的:熟悉使用动态系统仿真工具SimuLink的方法实验要求:1.练习启动SimuLink2.熟悉SimuLink模型窗口3. 练习使用鼠标和键盘操作1)对模块操作2)对直线操作3)对信号标签操作4) 对模型注释操作4. 练习使用以下模块库中的模块用SimuLink建立仿真模型的过程,可以理解为将模块库中的模块搭在一起。
模块库中的模块可以用SimuLink库浏览器得到。
●Source 系统输入模块●Sinks 系统输出模块●Discrete 离散时间系统模块库●Continuous 连续时间系统模块库●Discontinuities 不连续系统模块库●Math Operations 数学运算库●Signal Attributes 信号特性模块库●Signal Routing 信号路由模块●Look-Up Tables 表函数模块库5.用SimuLink建立一个仿真模型,要求仿真模型应该有模型本身、输入和输出部分。
并运行仿真模型得到仿真结果。
实验原理:用SimuLink对通信中2ASK信号进行解调的仿真解调:指从携带消息的已调信号中恢复消息的过程。
在各种信息传输或处理系统中,发送端用所欲传送的消息对载波进行调制,产生携带这一消息的信号。
接收端必须恢复所传送的消息才能加以利用。
2ASK(二进制振幅键控):振幅键控是正弦载波的幅度随数字基带信号而变化的数字调制.当数字基带信号为二进制时,则为二进制振幅键控。
幅度键控可以通过乘法器和开关电路来实现。
载波在数字信号1或0的控制下通或断,在信号为1的状态载波接通,此时传输信道上有载波出现;在信号为0的状态下,载波被关断,此时传输信道上无载波传送。
那么在接收端我们就可以根据载波的有无还原出数字信号的1和0。
对于二进制幅度键控信号的频带宽度为二进制基带信号宽度的两倍。
二进制振幅键控信号解调器原理框图实验内容:对2ASK信号进行解调(1) 建立simulink模型方框图相干解调也叫同步解调,就是用已调信号恢复出载波——既同步载波。
《计算机仿真技术》报告
《计算机仿真技术》实验报告实验一 数字仿真方法验证一、实验目的1.掌握基于数值积分法的系统仿真、了解各仿真参数的影响; 2.掌握基于离散相似法的系统仿真、了解各仿真参数的影响; 3.掌握SIMULINK 动态仿真;4.熟悉MATLAB 语言及应用环境。
二、实验环境网络计算机系统,MATLAB 语言环境三、实验内容、要求(一)试将示例1的问题改为调用ode45函数求解,并比较结果。
示例1:设方程如下,取步长 h =0.1。
上机用如下程序可求出数值解。
调用ode45函数求解: 1)建立一阶微分方程组 du=u-2*t/u2)建立描述微分方程组的函数m 文件 function du=sy11vdp(t,u) du=u-2*t/u3)调用解题器指令ode45求解y[t,u]=ode45('sy11vdp',[0 1],1) plot(t,u,'r-'); xlabel('t'); ylabel('u'); 结果对比:euler 法:t=1,u=1.7848; RK 法:t=1,u=1.7321; ode45求解:t=1,u=1.7321;[]1,01)0(2∈⎪⎩⎪⎨⎧=-=t u u t u dt duode45求解t-u 图:00.10.20.30.40.50.60.70.80.9111.11.21.31.41.51.61.71.8tu(二)试用四阶RK 法编程求解下列微分方程初值问题。
仿真时间2s ,取步长h=0.1。
⎪⎩⎪⎨⎧=-=1)0(2y t y dt dy 四阶RK 法程序:clear t=2; h=0.1; n=t/h; t0=0; y0=1;y(1)=y0; t(1)=t0;for i=0:n-1 k1=y0-t0^2;k2=(y0+h*k1/2)-(t0+h/2)^2; k3=(y0+h*k2/2)-(t0+h/2)^2 k4=(y0+h*k3)-(t0+h)^2;y1=y0+h*(k1+2*k2+2*k3+k4)/6; t1=t0+h; y0=y1; t0=t1;y(i+2)=y1; t(i+2)=t1;end y tplot(t,y,'r'); 结果:t=2,y=2.61090.511.522.511.21.41.61.822.22.42.62.83:(三)试求示例3分别在周期为5s 的方波信号和脉冲信号下的响应,仿真时间20s ,采样周期Ts=0.1。
计算机仿真与模拟实验
计算机仿真与模拟实验计算机仿真与模拟实验是一种通过计算机技术来模拟真实世界中的现象和过程的方法。
它利用计算机软件和硬件资源,通过对现实世界中的数据、模型和算法进行处理,模拟出真实世界中的实验过程,从而达到研究、分析和解决问题的目的。
一、计算机仿真的概念计算机仿真是指利用计算机技术对真实世界中的系统或过程进行模拟和再现的过程。
它通过对系统的行为、性能和特点进行建模和模拟,以预测系统在特定条件下的运行情况,或者验证某种理论的正确性和有效性。
二、计算机模拟实验的特点1.虚拟性:计算机模拟实验是在虚拟环境中进行的,不需要真实的实验设备和资源,可以在计算机上模拟出真实实验的整个过程。
2.可重复性:计算机模拟实验可以重复进行多次,通过多次实验可以得到更加准确和可靠的结果。
3.灵活性:计算机模拟实验可以方便地对实验条件和参数进行调整,可以模拟出不同情况下的实验结果。
4.经济性:计算机模拟实验可以节省实验设备和资源的使用,降低实验成本。
5.安全性:计算机模拟实验可以在安全的虚拟环境中进行,避免了真实实验中可能出现的风险和危险。
三、计算机模拟实验的应用领域1.自然科学:计算机模拟实验在物理学、化学、生物学等领域中有着广泛的应用,可以模拟出自然界中的各种现象和过程。
2.工程技术:计算机模拟实验在机械、电子、建筑、航空航天等领域中有着重要的应用,可以用于产品设计和性能测试。
3.社会科学:计算机模拟实验在经济学、政治学、社会学等领域中也有着广泛的应用,可以模拟出社会系统中的各种现象和过程。
4.医学与生物学:计算机模拟实验可以用于模拟人体生理和病理过程,用于新药研发和疾病治疗研究。
5.环境科学:计算机模拟实验可以用于模拟环境污染和生态系统的变化,用于环境保护和资源管理研究。
四、计算机仿真与模拟实验的方法和技术1.建模方法:计算机仿真与模拟实验首先需要建立数学模型,通过数学语言描述系统的行为和性能。
2.数值计算方法:计算机仿真与模拟实验需要运用数值计算方法对模型进行求解,得到系统的运行结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机仿真实验报告
专业:电气工程及其自动化班级:09电牵一班学号:22
姓名:饶坚指导老师:叶满园实验日期:2012年4月30日
一、实验名称
三相桥式SPWM逆变电路仿真
二、目的及要求
1.了解并掌握三相逆变电路的工作原理;
2.进一步熟悉MA TLAB中对Simulink的使用及构建模块;
3.掌握SPWM原理及构建调制电路模块;
4.复习在Figure中显示图形的程序编写和对图形的修改。
三、实验原理与步骤、电路图
1、实验原理图
2、电路原理(采用双极性控制方式)
U、V和W三相的PWM控制通常公用一个三角波载波Uc,三相的调制信号Uru、Urv和Urw依次相差120°。
电路工作过程(U相为例):当Uru>Uc时,上桥臂V1导通,下桥臂V4关断,则U相相对于直流电源假想中点N’的输出电压Uun’=Ud/2。
当Uru<Uc时,V4导通,V1关断,则Uun’=-Ud/2。
V1和V4的驱动信号始终是互补的。
当给V1(V4)加导通信号时,可能是V1(V4)导通,也可能是二极管VD1(VD4)续流导通,这要由阻感负载中电流的方向来决定。
Uun’、Uvn’和Uwn’的PWM波形都只有±Ud/2两种电平。
双极性PWM原理图
3、实验步骤
⑴、建立MATLAB仿真模型
对电路模型进行封装如下图示:
其中Subsystem1为主电路,Subsystem2为负载,Subsystem3为检测电路,Subsystem4为输入信号,Subsystem5为调制电路,Scope 为示波器,Repeating Sequence为三角载波。
各子系统电路分别如下所示:
Subsystem1
Subsystem2 Subsystem3
Subsystem4 Subsystem5
⑵、各模块参数设置
模块名称参数设置
E1、E2 Amplitude(V): 0.5*a
R1、R2、R3 Resistance(Ohms): 100 ;
Inductance(H): 0.1 ;
Capacitance(F): inf
Sine Wave Amplitude: 0.8 ;
Bias: 0;
Frequency(rad/sec): 2*f*pi ;
Phase (rad):0;
Sample Time:0
Sine Wave1 Amplitude: 0.8 ;
Bias: 0;
Frequency(rad/sec): 2*f*pi ;
Phase(rad) :-240*2*pi/360;
Sample Time:0
Sine Wave2 Amplitude: 0.8 ;
Bias: 0;
Frequency(rad/sec): 2*f*pi ;
Phase(rad) :-120*2*pi/360;
Sample Time:0
Repeating Sequence Time values:[0 0.0005 0.0015 0.002];
Output values:[0 1 -1 0]
注:参数中a为直流电压幅值(V),f为输入信号频率(Hz)。
运行前,在Simulation time中将Stop time设为0.04,运算方法选择ode23tb;双击Subsystem1,输入直流电压幅值(此次实验时输入为100V);双击Subsystem4,输入信号的频率(此次实验时输入为50Hz)。
⑶、作图
为便于写程序,将Scope中送到workspace中的Variable name更改为“s”。
新建一M文件,并在文件框里输入作图程序,执行并保存。
如下所示:
四、实验结果
在M文件中输入完程序执行后图形将会自动弹出,点击工具栏中的箭头标志,可对图形进行修改。
实验得到的图形如下所示。
五、实验心得
通过本次实验,学习了SPWM原理,简单的掌握了用双极型PWM来构建调制电路,了解了如何设置三角载波,加深了对三相逆变电路工作原理的理解,并掌握了一些建立子系统的技巧、方法,从中体会到做仿真实验成功的快乐。
在以后的试验中可能还会出现不太懂的地方,但是通过多次的试验,一定能不断加强自己的能力。