第6章力法
结构力学第六章 力法

四、n次超静定结构的力法典型方程
i1X1 i2 X 2 in X n iP 0(i 1、2、、n)
符号意义同前。 求解内力(作内力图)的公式:
M M1X1 M2X2 Mn Xn M P
FQ FQ1X1 FQ2 X2 FQn Xn FQP
FN FN1 X1 FN 2 X 2 FNn X n FNP 作内力图可以延用第三章的作法:由M→FQ→FN。
通常做法:拆除原结构的所有多余约束,代之 以多余力X,而得到静定结构。
规则: 1)去掉或切断一根链杆,相当于去掉一个约束; 2)去掉一个简单铰,相当于去掉两个约束; 3)去掉一个固定支座或切断一根梁式杆,相当于去 掉三个约束; 4)在梁式杆上加一个简单铰,相当于去掉一个约束。
10
例: a)
X1
X2
37
2、列 力法方程
1211XX11
12 X 2 22 X 2
1P 2P
0 0
(B 0) (C 0)
讨论方程和系数的物理意义。
q
A
D
Δ1P B
C
A
X1=1
δ11 δ21
D
B
C
A
δ12
X2=1 δ22
D
B C
38
位移方程(力法方程)
ΔφB=0 ——B左右截面相对转角等于零。 ΔφC=0 —— C左右截面相对转角等于零。
d)
原结构
X2
X1
X1
X2
n=2
13
e)
原结构
X1 X1 n=1
f)
原结构
n=3
X1
X3
X2
特别注意:不要把原结
构拆成几何可变体系。此
结构力学课后答案第6章力法
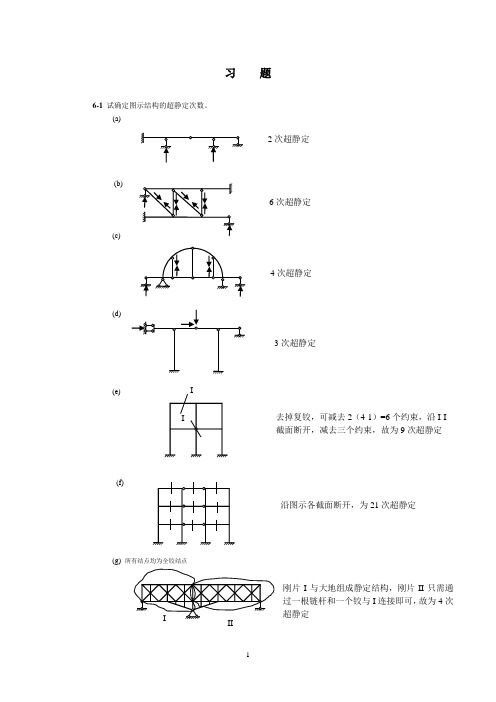
6-1试确定图示结构的超静定次数。
(a)
(b)
(c)
(d)
(e)
(f)
(g)所有结点均为全铰结点
(h)
6-2试回答:结构的超静定次数与力法基本结构的选择是否有关?力法方程有何物理意义?
6-3试用力法计算图示超静定梁,并绘出M、FQ图。
(a)
解:
上图=
其中:
(b)
解:
基本结构为:
6-4试用力法计算图示结构,并绘其内力图。
(Байду номын сангаас)
解:基本结构为:
(b)
解:基本结构为:
计算 ,由对称性知,可考虑半结构。
计算 :荷载分为对称和反对称。
对称荷载时:
反对称荷载时:
6-5试用力法计算图示结构,并绘出M图。
(a)
解:基本结构为:
用图乘法求出
(b)
解:基本结构为:
(c)
解:基本结构为:
(d)
解:基本结构为:
《结构力学》_龙驭球_第6章_力法(1)
X2=1
l M2 图
1 l l l l3 12 21 l (l l ) EI 2 2 EI
l
l
l
l
ql 2 2
EI
EI
原结构
X1=1
l
1、力法方程:
基本体系
M1 图 l
11 X 1 12 X 2 1P 0 21 X 1 22 X 2 2 P 0
3
l
1 l l 2l 5l 2、系数和自 11 ( ) 2 ( l l l ) 由项的计算: EI 2 3 3EI
解方程得: X 1 ql 2
X2=1
A
1
M2图
(
1 2 1 X 2 ql 4 3k 4
E1 I1 k) E2 I 2
1 2
1 3k 4
1 2 1 X 1 ql 2 3k 4 3. 讨论 1)当k = 0
即 E1 I1 很小或 E2 I2 很大
ql X1 8
11 X 1 12 X 2 1P 0 21 X 1 22 X 2 2 P 0
3
q=1kN/m
3m
q=1kN/m
FP = 3kN 4 2I I 2I 2 1
3m 3m
FP = 3kN
18
27
9
M P kN m
3m
X1
11
X2
6
6
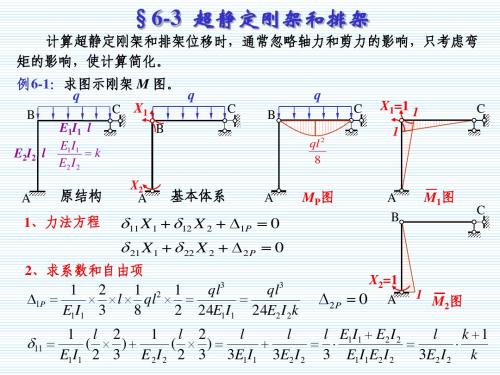
§6-3 超静定刚架和排架
计算超静定刚架和排架位移时,通常忽略轴力和剪力的影响,只考虑弯 矩的影响,使计算简化。 例6-1:求图示刚架 M 图。 q q C X1 B
结构力学 (1)
基本结构已 为何为 0 无支座位移
5. 内力计算(静定结构)
M M1 X1 M P
内力全部由多余未知力引 起
31
§6.6 支座位移、温度变化等作用下时的超静定结构的计算
M M 1 X 1 (
3EI ) x; 0 x l 3 l
3EI 3EI ) 3 2 l l
对于支座位移
A B
1. 超静定结构支座移动、温度改变使结构产生变形,同时产生内力。
C
C
A
B
C’
FyC
静定结构 无内力和支座反力
超静定结构 有内力和支座反力
23
§6.6 支座位移、温度变化等作用下时的超静定结构的计算
对于温度变化
A
t t
B
C
A
t t
B
C
C’
FyC
静定结构 无内力和支座反力
X2
X3
X1
a 0 11 X 1 12 X 2 13 X 3 1C 0 2 C b 0 21 X 1 22 X 2 23 X 3 0 X X X 0 3C 31 1 32 2 33 3 0
1 P 1C 0 11 X 1 12 X 2 13 X 3 P 基本结构由支座 2P X X X 0 位移引起的 21 1 22 2 23 3 22 CP X X X 0 3P i 方向位移 3 P 31 1 32 2 33 3 3 C
29
§6.6 支座位移、温度变化等作用下时的超静定结构的计算
基本结构(II)
第六章-力法(二) ,同济大学结构力学课件,朱慈勉版教材,吕凤悟老师课件
半结构选取的关键在于正确判别另外半结构对选取半结构的约束作用。 判别方法有两种:
根据对称轴上的杆件和截面的变形(或位移)特征判别。(适用于所有结构)
根据对称轴上的杆件和截面的内力特征判别。 (一般只适用于奇数跨结构)
【例】试用力法求作图示刚架的弯矩图。 各杆 EI C 。
Strucural Analysis
School of Civil Engineering, Tongji Univ.
§6-5 对称性的利用—力法简化计算
【例】试用力法求作图示刚架的弯矩图。各杆 EI C 。
【解】利用对称性简化为一次超静定。
11X1 1p 0
11
144 EI
,
1 p
1800 EI
X1 12.5kN
M M1X1 M p
Strucural Analysis
School of Civil Engineering, Tongji Univ.
§6-5 对称性的利用—力法简化计算
取半结构计算
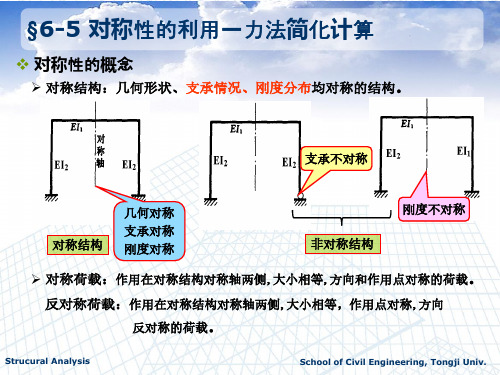
§6-5 对称性的利用—力法简化计算
对称性的概念
对称结构:几何形状、支承情况、刚度分布均对称的结构。
支承不对称
对称结构
几何对称 支承对称 刚度对称
非对称结构
刚度不对称
对称荷载:作用在对称结构对称轴两侧,大小相等,方向和作用点对称的荷载。 反对称荷载:作用在对称结构对称轴两侧,大小相等,作用点对称,方向
13X 3 23X 3
1 p 2p
0 0
31X1 32 X 2 33 X 3 3 p 0
第四、五、六章练习题答案

图3-18
14.利用影响线,求得结构在图3-20所示荷载作用下,C截面的剪力等于-20kN。(×)
15.结构的附属部分某截面某量值的影响线在基本部分的影响线竖标为零。(√)
第六章力法
1.超静定结构中有几个多余约束就有几个建立力法方程的变形条件。(√)
7.图3-14a所示梁的剪力图,竖标 是截面C左的剪力值,图3-14b是截面C的剪力影响线,竖标- 也是表示在移动荷载作用下截面C左的剪力值。(×)
图3-14
8.图3-15b可以代表图3-15a所示梁EF段任意截面的剪力影响线。(√)
图3-15
9.任何静定结构的支座反力、内力影响线,军事有一段或是数段直线组成。(√)
2.力法方程中的主系数的符号在任何情况下都取正值。(√)
3.把超静定结构的基本未知力求出来后,画最后内力图时,实际上是在画静定结构的内力图。(√)
4.图5-14所示超静定结构当支座A发生位移时,构建CD不会产生内力。(√)
图5-14
5.对图5-15(a)所示超静定刚架,若进行内力分析时采用5-15b所示的基本结构,并画出了最后的内力图,当计算C点的竖向位移时可选用图5-15 C所示的基本结构。(√)
2.剪力的结构包络图表示梁在已知荷载作用下各截面剪力可能变化的极限范围。(√)
3.静定桁架的影响线在结点之间必是一条直线。(√)
4.下图3-10所示两根梁的MC影响线不相同。(×)
图3-10图3-11
5.同4题图所示两根梁的QC影响线不相同。(√)
6.图3-11所示单位荷载在AB区间移动,绘制界面C的某内力影响线时,也应限制在AB区间内。(√)
10.静定梁某截面弯矩的临界荷载位置一般就是最不利荷载位置。(×)
【毕业论文】力法的基本原理
1第六章力法2一. 力法的基本未知量和基本体系力法计算的基本思路:把超静定结构的计算问题转化为静定结构的计算问题,即利用已经熟悉的静定结构的计算方法来达到计算超静定结构的目的。
6-1 力法的基本原理3力法思路基本结构待解的未知问题qEI EIqEIX 1基本体系基本未知量01=Δ基本方程41111=+=P ΔΔΔ11111X Δδ=01111=+⋅P ΔX δ力法方程力法方程P 1Δ其中δ11和Δ1P可图乘法获得;由此确定约束力X 1,通过叠加求内力;超静定问题变成静定问题。
q1X Δ11=X 11δqEIqEIX 11=Δ5)力法是将多余未知力作为基本未知量的分析方法。
)将全部多余约束去掉得到的静定结构称力法的基本结构。
)根据原结构的变形条件而建立的位移方程称力法基本方程。
在变形条件成立条件下,基本体系的内力和位移与原结构相同。
1111=+⋅P ΔX δ6基本结构X 1例:基本体系PV ΔB 1==原结构已知的X 1方向的位移原结构70V ΔB 1==基本结构在X 1和外荷载P 分别作用下的变形:X 111ΔPP1Δ原结构已知的X 1方向的位移基本结构在X 1方向的位移1P 11Δ+Δ1P 11Δ+Δ0=11111X Δδ=11=X 11δ01111=Δ+P X δ力法基本方程的物理意义:基本结构在X 1和外荷载P 共同作用下,在B 点的竖向位移之和=原结构已知的在B 点的竖向位移(等于零)。
8一个超静定结构可选的力法基本结构往往不只一种。
X 1表示原结构支座B 截面的弯矩。
基本体系二基本体系二选取:原结构PPX 1基本结构Δ1=原结构在B 点左右两截面的相对转角等于零9基本结构:PX 11PΔ11ΔB11111X δ=Δ0ΔX δ=+1P 111基本体系在X 1 和外荷载P 共同作用下,在B 点左右两截面的相对转角之和=原结构已知的在B 点左右两截面的相对转角(等于零)1P11Δ+Δ0=10(1)(2)(1)基本结构的图和图好绘。
结构力学——力法
X1 X2
ql 2 / 40 M
∆1 = 0 ∆ 2 = 0 δ11 ⋅ X1 + δ12 ⋅ X2 + ∆1P = 0 δ21 ⋅ X1 +δ22 ⋅ X2 + ∆2P = 0
q
X1 = −3ql / 20, X 2 = −ql 2 / 40
将未知问题转化为 已知问题, 已知问题,通过消除已 知问题和原问题的差别, 知问题和原问题的差别, 使未知问题得以解决。 使未知问题得以解决。 这是科学研究的 基本方法之一。 基本方法之一。
二.力法的基本体系与基本未知量 力法的基本体系与基本未知量 超静定次数: 超静定次数: 多余约束个数.
若一个结构有N个多余约束,则称其为N次超静定结构. . 几次超静定结构? 几次超静定结构
X
= 3 ql / 8 ( ↑ )
⋅ X
+ M
P
ql
2
/ 2
l
MP
M1
力法步骤: 力法步骤: 1.确定基本体系 4.求出系数和自由项 确定基本体系 求出系数和自由项 2.写出位移条件 力法方程 写出位移条件,力法方程 5.解力法方程 写出位移条件 解力法方程 3.作单位弯矩图 荷载弯矩图 6.叠加法作弯矩图 作单位弯矩图,荷载弯矩图 作单位弯矩图 荷载弯矩图; 叠加法作弯矩图 练习 P EI l EI l 作弯矩图. 作弯矩图
M1
3 Pl 8 5 Pl 8
=0 δ 11 = 4l / 3EI ∆1P = − Pl 3 / 2 EI
X 1 = 3 P / 8(↑)
M = M1 ⋅ X 1 + M P
P
MP
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X1=1
5 4l 3 FP l 8
FP l 3 M Δ1P 2 EI
l
l
FP
l
X1
M1
FP l
MP
选用其它基本体系
FP
X1 EI X1 尽管选取的基本结构不同,但力法方程形式均为: X1 EI EI
FP
EI
d11 X1 Δ1P 0
不同的基本结构对应的基本方程的物理含意义不同。 不同的基本结构计算工作量繁简不同,应尽量选取 便于计算的静定结构作为基本结构。
M图(kN.m)
由已知的弯矩求剪力求轴力
160 53.33
53.33 QCD C
20kN/m
↓↓↓↓↓↓↓↓↓↓↓↓
53.33
D
8m
M
M图(kN.m)
D
53 .33 20 8 4 - 53 .33 - QCD 8 0
80
QCD 80 k N
8.9 80 +
- -
NCD
d 11 X 1 D1P 0
512 D1P EI1
↓↓↓↓↓↓↓↓↓↓↓↓
q=20kN/m I1
I2 I =k I 2 1
I2
q=20kN/m 超静定结构由荷载产 ↓↓↓↓↓↓↓↓↓↓↓↓ 生的内力与各杆刚度的相 对比值有关,与各杆刚度 的绝对值无关。 基本体系
d11
288 k 144 k EI1 D X 1 - 1P
0 M i2 MiM M i M P δ21 0 ↓↓↓↓↓↓↓↓ k B d iiq ds 0,d ik ds 0 ,D iP ds 0 ↓↓↓↓↓↓↓↓ EI EI EI X =1 0 X 0 基本体系 X
ΔBH=Δ 1 =0 主系数恒为正,付系数、自由项可正可负可为零。主系数、 ×X1 = ΔBV=Δ2=0 δ = + 12 付系数与外因无关,与基本体系的选取有关,自由项与外因有关。
力法是将多余未知力作为基本未知量的分析
方法。
将全部多余约束去掉得到的静定结构称力法
的基本结构。
根据原结构的变形条件而建立的位移方程称
力法基本方程。
力法举例
3 FP l 8
FP EI
EIld11 来自 X1 Δ1P 0d 11
3EI 3 X1 FP M X1 M1 M P 8
两端固支梁在竖向荷载作用下没有水平反力
d11 X 1 d12 X 2 D1P 0 典型方程改写为 d 21 X 1 d 22 X 2 D 2 P 0 2 FP ab 可代 图乘求得位移系数为 X1 得入 l2 l 并 2 d 11 d 22 2d 12 3 EI X FP a b 求 2 FP ab( l b ) l2 解 D1 P F ab2
第6章 力法
Force Method 基本要求:
掌握力法基本体系的确定、力法 典型方程的建立、方程中系 数和自由项的计算。 熟练掌握用力法计算超静定梁和 刚架、对称性利用、 重点掌握荷载作用下的超静定结 构计算。 了解力法典型方程的物理意义、 温度改变和支座移动下的超 静定结构计算。超静定 结构的位移计算。
撤 (1)撤除一根支杆、切断一根链杆、把固定端化成固定铰 除 支座或在连续杆上加铰,等于撤除了一个约束。 举例 约 束 (2)撤除一个铰支座、 撤除一个单铰或撤除一个滑动支 的 举例 座,等于撤除两个约束。 方 式 (3)撤除一个固定端或切断一个梁式杆,等于撤除三个约束。
举例
=
撤除约束时需要注意的几个问题:
几何特征(形状和尺寸)有关。
非荷载因素也会使超静定结构内力和反力;
由于有多余约束,所以增强了抵抗破坏的能力;
由于有多余约束,所以增强了超静定结构的整
体性,在荷载作用下会减小位移,内力分布更 均匀。
超静定结构的计算方法
基本思想: 1、找出未知问题不能求解的原因; 2、改造原问题将其化成会求解的问题; 3、找出改造后的问题与原问题的差别; 4、消除差别后,改造后的问题的解即为原问题的解 具体操作: 1、在所有未知量中分出一部分作为基本未知量; 2、将其它未知量表成基本未知量的函数; 3、集中力量求解基本未知量。
由于基本未知量选取的不同,超静定结构 的解法分两大类: 力 法-----取某些力作为基本未知量; 位移法-----取某些位移作为基本未知量。
§6.2 力法的基本概念
力法思路
q
待解的未知问题
EI EI
基本结构 基本体系
X1
q
EI
基本未知量
Δ1 0
基本方程
1、超静定结构计算的 总原则:
欲求超静定结构先取一个 基本体系,然后让基本体系在 受力方面和变形方面与原结构 完全一样。
+
×X1
X1 =1
Δ1=δ11X1 + Δ1P=0 X1=-Δ1P / δ11
EI 2 1 1 ql 3l ql 4 l EI 3 2 4 8 EI
D 1P
M 1M P
dx
=3ql/8
ql2/8
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓ M图
或按: MX 1 M P M
叠加
3ql/8
力法步骤归纳:
1、确定超静定次数,选取基本体系; 2、按照位移条件,写出力法典型方程; 3、作单位弯矩图,荷载弯矩图 4、求出系数和自由项 5、解力法典型方程求多余未知力 6、用叠加法作弯矩图
M X1 M1 M P
在变形条件成立条件下,基本体 系的内力和位移与原结构相同。
多余约束只是对几何不变性而言的,对内力和变
形而言这些约束是有作用的,它们直接影响到内 力和变形的大小和分布规律。
在一个静定结构上增加多余约束所得的超静定结
构是唯一的;但从超静定结构上去掉多余约束使 之成为静定结构时,形式可以有多种多样,多余 约束在很大范围内是可以任选的。
超静定内力和反力与材料的物理性质、截面的
对于 n 次超静定结构有n个多余未知力X1、 X2、…… Xn,力法基 本体系与原结构等价的条件是n个位移条件, Δ1=0、 Δ2=0、 ……Δn=0,将它们展开 或: Δi=∑δijXj+ Δ iP=0 i,j=1,2,……n
M M + δ11X1+ δ212X2+……+ δ1nXM kΔ 1P 0 =0 计算刚架的位移 d ii i ds 0,d ik i n ds 0 , EI EI 时,只考虑弯矩的影 0 δ21X1+ δ22X2+……+ δ2nXn+ Δ 2P=0 响。但高层建筑的柱 ………………………………………… 0 MM δn1X i 2 ds 0 D iP 1+ δn2XP +……+ δnnXn+ Δ nP=0 要考虑轴力影响,短 EI 0 而粗的杆要考虑剪力 影响。 由上述,力法计算步骤可归纳如下: 1)确定超静定次数,选取力法基本体系; 2)按照位移条件,列出力法典型方程; 3)画单位弯矩图、荷载弯矩图,用(A)式求系数和自由项; 4)解方程,求多余未知力; 5)叠加最后弯矩图。M M i X i M P
A δ22 B
2 1 1
δ11
↓↓↓↓↓↓↓↓
Δ2P
Δ1=Δ11+Δ12+Δ1P=0 δ11X1+ δ12X2+Δ1P=0 δ21X1+ δ22X2 +Δ2P=0
X2=1 ×X2
+
Δ1P
含义:基本体系在多余未知力和荷载共同作用下,产生的多余未知 力方向上的位移应等于原结构相应的位移,实质上是位移条件。 主系数δii表示基本体系由Xi=1产生的Xi方向上的位移 付系数δik表示基本体系由Xk=1产生的Xi方向上的位移 自由项ΔiP表示基本体系由荷载产生的Xi方向上的位移
1、超静定结构计算的总原则: 欲求超静定结构先取一个基本体系,然 后让基本体系在受力方面和变形方面与原 结构完全一样。
力法的特点: 基本未知量——多余未知力 基本体系——静定结构 基本方程——位移条件 (变形协调条件) 由基本体系与原结构变形 一致达到受力一致
位移法的特点: 基本未知量—— 基本体系—— 基本方程——
X 0 Y 0
- 8.9
N CD -8.9k N N CA -80 k N
NCA
80
160
80 80 N图(kN)
-
8.9
8.9
Q图(kN)
+
-
53.33
160
M图(kN.m)
由M图画出变形曲线草图
q X1 q EI l l/2 X1 q q
X1
§6.3 力法方程的典型形式
基 本 体 系
单位和荷载弯矩图 M i , M P 为:
M 3 0 , FQ 3 0 由于 FN1 FN 2 FNP 0
所以
FP
M P图
FP ab l
d 13 d 31 d 23 d 32 D3 P 0 又由于 2 2 M 3 ds FN 3ds d 33 EI EA 2 FQ 3ds l k 0 GA EA 于是有 X3 0
§6.1 超静定结构的组成和超静定次数
a) 静定结构 b) 超静定结构
是无多余约束的几何不变体系。 是有多余约束的几何不变体系。 由此可见:内力超静定,约束有多余,是超 静 定结构区别于静定结构的基本特点。 超静定次数确定 把原结构变成静定结构 超静定次数=多余约束的个数 时所需撤除的约束个数 多余未知力的个数 =未知力的个数—平衡方程的个数
(A)
§6.4 超静定梁、刚架和排架 例 . 求解图示两端固支梁。 解:取简支梁为基本体系 力法典型方程为: