高效仿形对靶喷药装置探测传感设计与试验-毕业设计定稿
基于LiDAR的对靶喷雾实时控制系统设计与试验

instruction corresponding to the delay memory address and sent it to the solenoid valve controller to realize
the target spray. The response time of the system was firstly analyzed in the experimental partꎬ including
spray system was designed. The system took the laser detection and ranging ( LiDAR) as the detector and
the real ̄time speed of the spray vehicle was obtained by using the true ground speed sensor ( TGSS) ꎬ and
( College of Mechanical and Electronic Engineeringꎬ Nanjing Forestry Universityꎬ Nanjing 210037ꎬ China)
Abstract: Aiming at the problem of delayed spray in automatic target sprayingꎬ a real ̄time control target
a delayed spray model was establishedꎬ which continuously adjusted the spray delay time. The delay
果园柔性对靶喷雾装置设计与试验_宋淑然

第31卷第10期农业工程学报V ol.31 No.102015年5月Transactions of the Chinese Society of Agricultural Engineering May 2015 57 果园柔性对靶喷雾装置设计与试验宋淑然1,2,3,陈建泽3,洪添胜1,2,4※,张丞4,代秋芳3,薛秀云3(1.南方农业机械与装备关键技术教育部重点实验室,广州 510642;2.国家柑橘产业技术体系机械研究室,广州 510642;3. 华南农业大学电子工程学院,广州 510642;4. 华南农业大学工程学院,广州 510642)摘要:为确定果园柔性对靶喷雾装置的喷雾控制策略,并测定对应方式下不同树冠直径的雾滴沉积率,该文使用自制的果园柔性对靶喷雾机样机,用连续喷雾方式以及3种不同控制方式的对靶喷雾对株距为4 m、树高为1.7 m、树冠直径为1.1 m的模拟靶标进行了喷雾试验,测定了对应方式下的靶标上的雾滴沉积率。
试验结果表明,连续喷雾方式下的雾滴沉积率为40.3%;3种对靶喷雾方式下的雾滴沉积率分别为50.4%、77.8%、86.0%,均高于连续喷雾方式下的雾滴沉积率,由此选定了对靶喷雾方式Ⅲ作为果园柔性对靶喷雾装置的喷雾控制策略。
在对靶喷雾方式Ⅲ控制策略下,对株距为4 m、树高为1.7 m、树冠直径为2.1 m的模拟靶标进行了对靶喷雾试验,测得其雾滴沉积率为88.4%;同时发现无靶标区域内的雾滴沉积量明显小于模拟靶标区域,雾滴沉积的对靶特性明显;在模拟树冠中间区域的雾滴沉积量均高于模拟树冠边缘区域,符合实际果树树冠对药液的需求。
该研究为进一步提高柔性对靶喷雾装置的雾滴沉积率和优化其喷雾技术参数提供参考。
关键词:农业机械;喷雾;果园;柔性;超声波;激光测距;雾滴沉积doi:10.11975/j.issn.1002-6819.2015.10.008中图分类号:S491 文献标志码:A 文章编号:1002-6819(2015)-10-057-07宋淑然,陈建泽,洪添胜,等. 果园柔性对靶喷雾装置设计与试验[J]. 农业工程学报,2015,31(10):57-63.doi:10.11975/j.issn.1002-6819.2015.10.008 Song Shuran, Chen Jianze, Hong Tiansheng, et al. Design and experiment of orchard flexible targeted spray device[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 57-63. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2015.10.008 0 引 言中国是世界水果生产大国,但在果树病虫害防治过程中农药过量使用和农药在农产品中的残留问题较为突出。
果园仿形喷雾机的电控系统设计与试验

果园仿形喷雾机的电控系统设计与试验一、引言:果园仿形喷雾机,是一种用于果园中进行喷雾作业的机械设备。
喷雾机的主要作用是在果树上喷洒农药或杀虫剂,以达到控制害虫、病害的目的,保障果树的生长和产量。
为了提高果园喷雾的效率和质量,采用电控系统对仿形喷雾机进行升级改造,实现自动化控制。
二、设计要求:1. 自动化控制:实现系统集成,并对喷雾机进行电气自动控制,以减少人工作业,提高喷雾效率和精度。
2. 稳定性:系统要求稳定可靠,防止喷雾中途出现故障和异常。
3. 经济性:控制系统要经济、简单、易于维护和维修。
三、系统设计:1. 控制模式选择:本设计采用单片机控制模式,电控系统应该包括单片机控制芯片、电源、输入输出接口、传感器和执行器等组件。
2. 传感器选择:仿形喷雾机的喷雾量、速度等参数需要传感器对其进行测量。
对于这些参数的测量,可以采用压力传感器、流量传感器等,满足不同要求。
3. 控制程序编写:编写控制程序,根据传感器所读取的数据进行控制,完成喷雾机自动化控制。
根据控制要求设计控制程序的结构和算法。
4. 电路设计:设计和搭建喷雾机电控板电路,包括单片机的电源和I/O接口电路,传感器信号处理电路,执行器驱动电路等。
5. 自动化控制测试:进行系统测试,检验控制系统的稳定性和所设计的功能是否得以实现。
四、系统试验:1. 开关机试验:通过开关机按钮进行测试,检查单片机是否能够准确地完成操作。
2. 调节喷雾量试验:调节单片机程序中的输出电压,控制喷雾量增大或减小的情况下,检查喷雾机马达在不同输出电压下的喷雾量变化,以评估控制系统是否能够准确地完成调节喷雾量的功能。
3. 调节喷雾速度试验:调节单片机程序中的输出电压,检查喷雾机马达在不同输出电压下的喷雾速度变化,以评估控制系统是否能够准确地完成控制喷雾速度的功能。
4. 稳定性试验:运行控制系统连续数小时,检查系统是否能够长时间稳定运行。
五、总结:本系统的设计主要是针对现有果园仿形喷雾机的自动化控制问题进行改进,实现了更为准确、高效和自动化的喷雾控制功能。
变量喷药装置控制系统的设计与试验

基金项目:黑龙江省哲学社会科学研究规划项目"黑龙江省生态
文明机制体系建设问题研究”(18JYH760)
作者简介:周文娟(1985—),女,
,硕士,
为
控制与
。
,研究方
此外,还可 的时
进水 的药 量。
的34 器
差分析得出,药 机械的研制提 行性参考。
0.01%, 喷药农用
1喷药装置整体方案设计
1.1主要结构和工作原理
喷药装置试验台结构示意图如图1所示。喷药装置试
要
传感器、 器、调节、溢 、 泵、
药箱、3段12 喷头、量、 传感器以及各种道
Q
图1喷药装置试验台结构示意图
B C 1药2 V液D 箱
D液 体 泵
E过 滤 器
F G H M N S P X
流
主 h阀t
溢流
压力
压力
搅 调
拌 节 位
液分
3
计 阀 传 表 器 阀 传 阀
的 增量为!N,
4s的
,
后,用加
,当流回:
y⑹=罟6 [(4A2V(f) + 3A^(/c-1) + 2AN(k-2)+ AN(k — 3)]
调节阀 用 Tee Jet 的 344BRL, 从
开需要6 s,测试的有效最小微动是1/160 s&
2喷药控制系统硬件电路设计
药
路
器为 ,
装为LQFP-44、STC12C5A60S2型单片机,其
3.1压力及流量试验
进行喷头流量试验 , 将 有 的量
在
相应的喷头下方,起动电动机,打开主阀开关;当主阀进
水口压力为0.45 MPa和0.80 MPa时(即此时压力表N的
LiDAR探测自动对靶喷雾控制系统设计
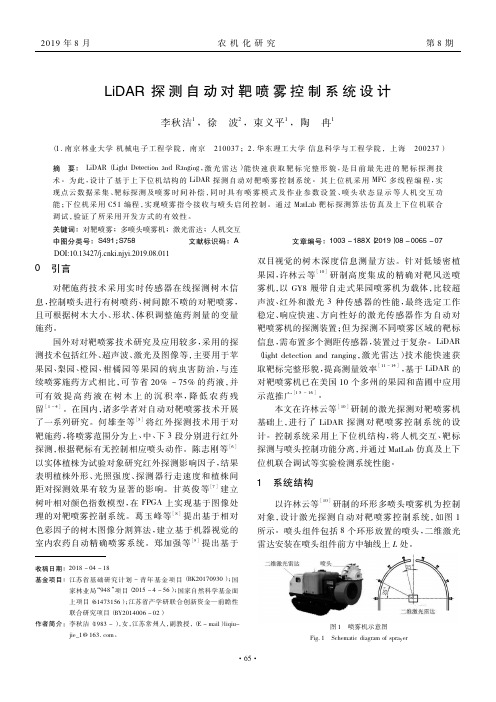
LiDAR探测自动对靶喷雾控制系统设计李秋洁1,徐波2,束义平1,陶冉1(1.南京林业大学机械电子工程学院,南京210037;2.华东理工大学信息科学与工程学院,上海200237)摘要:LiDAR(Light Detection andRanging,激光雷达)能快速获取靶标完整形貌,是目前最先进的靶标探测技术。
为此,设计了基于上下位机结构的LiDAR探测自动对靶喷雾控制系统。
其上位机采用MFC多线程编程,实现点云数据采集、靶标探测及喷雾时间补偿,同时具有喷雾模式及作业参数设置、喷头状态显示等人机交互功能;下位机采用C51编程,实现喷雾指令接收与喷头启闭控制。
通过MatLab靶标探测算法仿真及上下位机联合调试,验证了所采用开发方式的有效性。
关键词:对靶喷雾;多喷头喷雾机;激光雷达;人机交互中图分类号:S491;S758文献标识码:A文章编号:1003-188X(2019)08-0065-070引言对靶施药技术采用实时传感器在线探测树木信息,控制喷头进行有树喷药、树间隙不喷的对靶喷雾,且可根据树木大小、形状、体积调整施药剂量的变量施药。
国外对对靶喷雾技术研究及应用较多,采用的探测技术包括红外、超声波、激光及图像等,主要用于苹果园、梨园、橙园、柑橘园等果园的病虫害防治,与连续喷雾施药方式相比,可节省20% 75%的药液,并可有效提高药液在树木上的沉积率,降低农药残留[1-4]。
在国内,诸多学者对自动对靶喷雾技术开展了一系列研究。
何雄奎等[5]将红外探测技术用于对靶施药,将喷雾范围分为上、中、下3段分别进行红外探测,根据靶标有无控制相应喷头动作。
陈志刚等[6]以实体植株为试验对象研究红外探测影响因子,结果表明植株外形、光照强度、探测器行走速度和植株间距对探测效果有较为显著的影响。
甘英俊等[7]建立树叶相对颜色指数模型,在FPGA上实现基于图像处理的对靶喷雾控制系统。
葛玉峰等[8]提出基于相对色彩因子的树木图像分割算法,建立基于机器视觉的室内农药自动精确喷雾系统。
果园对靶喷药控制系统的设计及试验

果园对靶喷药控制系统的设计及试验邹㊀伟1ꎬ2ꎬ王㊀秀1ꎬ2ꎬ高㊀斌3ꎬ4ꎬ范鹏飞3ꎬ4ꎬ苏㊀帅1(1.北京农业智能装备技术研究中心ꎬ北京㊀100097ꎻ2.国家农业智能装备工程技术研究中心ꎬ北京㊀100097ꎻ3.农业部农业信息技术重点实验室ꎬ北京㊀100097ꎻ4.农业智能装备技术北京市重点实验室ꎬ北京100097)摘㊀要:针对目前果园喷药作业现状ꎬ设计了果园对靶喷药控制系统ꎮ该系统根据霍尔(测速)传感器实时检测拖拉的行驶速度ꎬ采用红外传感器列阵探测果树树冠ꎬ根据靶标检测信息和行驶速度来控制电磁阀的频率与占空比ꎬ从而调节喷头流量ꎬ实现了基于果树树冠检测的对靶变量施药ꎮ室外对靶施药试验结果显示:在传感器探测范围内ꎬ果树靶标识别率100%ꎬ喷药覆盖率100%ꎻ当拖拉机速率不超过1.16m/s时ꎬ对于同一靶标区域ꎬ速度几乎不影响靶标的检测宽度ꎻ同等条件下ꎬ速度越大ꎬ喷药宽度的相对误差越小ꎮ关键词:果园ꎻ对靶喷药ꎻ靶标探测ꎻ脉宽调制中图分类号:S491㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)02-0177-060㊀引言精细农业果园生产管理中ꎬ单棵果树是最小的作业单元ꎬ果树的位置和树冠大小是果树施肥㊁灌溉和果树病虫害防治中确定投入量多少的重要依据[1-3]ꎮ无靶标喷施造成的靶标以外大量农药沉积是果园农药残留的主要原因之一ꎬ对靶喷药技术是降低农药残留的有效手段ꎬ其关键技术是靶标探测技术[4-7]ꎮ对靶喷药可以有效节省农药ꎮ翟长远等设计了一种幼树靶标探测器ꎬ通过红外传感器探测喷药机两侧果树树干的位置ꎬ根据内部算法计算出靶标喷雾位置ꎬ从而控制开闭喷头电磁阀ꎬ以实行对靶喷药[8]ꎮ在实际的果园中ꎬ大多数果树的树干是很难检测的ꎮ例如ꎬ如橘树与桃树的枝叶繁茂ꎬ树冠很低ꎬ红外传感器几乎无法探测树干ꎮ在标准化果园中ꎬ果树四周还有栅栏ꎬ传感器实际上是在探测果树的树枝或栏杆ꎬ没有实际探测到树干ꎬ控制器误以为这是树干ꎬ将以这一探测点为中心ꎬ实行喷药作业ꎬ导致单片机计算的喷药范围错误ꎮ另外ꎬ该喷药机只是控制电磁阀开闭ꎬ无法做到变量喷药ꎮ实现变量喷药控制技术ꎬ其核心是根据喷药实施环境的变化实时控制喷药量ꎻ但传统变量喷药控制技术是根据调节系统压力实现变收稿日期:2017-09-13基金项目: 十二五 国家科技支撑计划项目(2014BAD16B0103)ꎻ国家重点研发计划项目(2016YFD0700104)作者简介:邹㊀伟(1985-)ꎬ男ꎬ湖北洪湖人ꎬ助理研究员ꎬ(E-mail)zouw@nercita.org.cnꎮ通讯作者:王㊀秀(1965-)ꎬ男ꎬ北京人ꎬ研究员ꎬ博士生导师ꎬ(E-mail)xiuwang@263.netꎮ量控制[9]ꎬ实际喷药作业中压力很难实现精确㊁快速调节ꎮ刘大印等人设计了基于单片机PWM变量农药喷洒控制系统ꎮ采用脉宽调制技术来控制喷药流量ꎬ但是喷药变量范围比较小[10-11]ꎮ针对这些问题ꎬ本文设计了一种基于树冠探测的对靶控制系统ꎮ该控制系统通过红外传感器列阵探测树冠位置及树冠的宽度ꎬ结合拖拉机运行速度计算喷洒范围ꎬ控制多路电磁阀的开闭以进行对靶喷药ꎬ在没有果树的地方停止喷药ꎻ采用PWM驱动方法ꎬ改变喷头的喷药流量ꎬ实现变量作业ꎻ传感器固定架采用多孔设计ꎬ便于调整红外传感器的上下分布间距ꎬ以适应不同要求ꎮ喷头可以通过旋转调节喷药范围ꎮ1㊀系统设计1.1㊀喷药机构成喷药机主要由机械部分及喷药控制系统组成ꎬ如图1所示ꎮ图1㊀系统结构图Fig.1㊀TheStructureofthesystem2019年2月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第2期图1中ꎬ机械部分主要由药箱ꎬ离心泵ꎬ调压阀ꎬ喷头㊁风扇以及各种管道等组成ꎮ药箱通过阀门进入主管道ꎬ为避免药液中较大的颗粒或其他杂质堵塞喷头ꎬ药液需要首先进入过滤器ꎮ主管道与调压阀相连ꎬ调压阀用于稳定喷药管道的压力ꎬ进过调压阀后ꎬ输出管道分成左右两个分管道ꎬ左右两个分管道的末端各接3个高压电磁阀ꎬ每个电磁阀后接2个喷头ꎬ一共12个喷头ꎮ西门子PLC通过控制电磁阀的开闭来控制喷头是否喷药ꎮ1.2㊀控制系统设计控制系统主要由PLC控制器㊁红外测距传感器㊁速度传感器㊁人机交互触摸屏㊁电磁阀㊁固态继电器及其他外围电路等组成ꎬ如图2所示ꎮ图2㊀系统结构图Fig.2㊀TheStructureofthecontrolsystem控制系统以西门子PLC-224XP为控制核心ꎬ处理传感器的各种信号ꎬ完成与触摸屏幕的人际交互ꎬ控制电磁阀的动作ꎮ红外传感器列阵用来检测拖拉机左右两侧的果树树冠的高度及宽度ꎬ本文选用上海森正电气有限公司生产的E3K80-DS5M1漫反射红外传感器ꎬ检测最大距离150cmꎮ传感器在探测到靶标后ꎬ输出开关信号ꎮ红外传感器信号输出端需要外接10kΩ的上拉电阻ꎬ实现与PLC的IO口连接ꎮ系统采用霍尔传感器感应拖拉机的行驶速度ꎬ霍尔传感器是浙江沪工自动化科技有限公司生产的NJK-5003Cꎬ属于NPN常开型ꎬ检测速度时需要配合强磁铁使用ꎬ最大感应距离5cmꎮ本系统在拖拉机的轮毂上均匀分布了6个强磁铁ꎬ拖拉机轮子每转动1圈ꎬ霍尔传感器输出6个脉冲ꎮ控制器通过脉冲信号来计算拖拉机的行驶速度及累计行驶距离ꎮ电磁阀采用上海凯志阀门有限公司公司生产的V2A102ꎬ电磁阀压力范围0~1.0MPaꎬ满足喷药工作压力要求ꎮ由于PLC输出口的输出电流比较小ꎬ无法直接驱动电磁阀ꎬ需要设计相应的驱动电路来控制电磁阀的开启ꎮ控制器通过控制固态继电器的通断ꎬ进而控制电磁阀的开闭ꎮ人机交互界面采用深圳显控发展有限公司的SA-7触摸屏ꎬ实现人机交互ꎬ通过触摸屏可以输入各项参数数据ꎬ实时显示传感器的各项数据ꎬ并可以手动打开和关闭电磁阀ꎬ方便操作ꎮ1.3㊀工作原理及控制算法系统通过检测靶标情况ꎬ结合拖拉机的运行速度ꎬ通过控制电磁阀来实现对靶变量喷药ꎮ对靶喷药的关键点在于:传感器与喷头不在同一作业面ꎬ传感器在拖拉机车头ꎬ喷药喷头在拖拉机车尾ꎬ拖拉机先检测靶标并存储数据和靶标位置ꎬ根据系统设置参数计算喷药的位置及喷药宽度ꎮ计算之后作业ꎬ解决靶标检测与喷药的不同步性问题ꎻ控制喷药的喷洒范围ꎬ做到有靶标喷药ꎬ无靶标停止喷药ꎬ实现精准喷药和根据速度变量作业ꎮPLC首先根据按键选择ꎬ判断喷药机处于何种工作模式下ꎮ如果按键没有按下ꎬ判断喷药机处于手动控制下ꎬPLC放弃对喷药执行单元的控制ꎻ如果按下按键ꎬ则喷药机处于自动喷药模式ꎮ在自动喷药模式下ꎬ需要操作者预先设定单位面积的喷洒量ꎬ此后控制器会根据设定值自动控制喷药作业ꎮ开始工作后ꎬPLC通过霍尔传感器采集速度信号ꎮ拖拉机的轮毂上均匀地安装了6块强磁铁ꎬ在拖拉机运动时ꎬ霍尔传感器每接近1个磁铁即输出1个脉冲ꎬ每周输出6个脉冲ꎮ由于拖拉机的轮子转动1周的距离是固定的ꎬ所以在传感器输出两个相邻脉冲的间隔时间内拖拉机的移动距离是相等的ꎮPLC根据两个脉冲之间的时间ꎬ计算出拖拉机的瞬时速度vꎬ公式为v=sd/әt式中㊀v 拖拉机行驶速度(m/s)ꎻ㊀sd 单一脉冲所代表的距离(m)ꎻ㊀Δt 相邻两个脉冲之间的时间间隔(s)ꎮ拖拉机的行驶距离可以根据累计脉冲数和速度计算ꎬ当霍尔传感器刚好接近强磁铁时ꎬ此时的脉冲数乘以单位距离正好就是行驶距离ꎬ即st=n sd式中㊀st 拖拉机行驶距离(m)ꎻ㊀n 脉冲数ꎮ当传感器位于两个强磁铁之间时ꎬ由于下一个脉冲尚未来到ꎬ脉冲数维持不变ꎬ但实际距离在变大ꎬ需要估算增大的这部分距离ꎬ用sa表示ꎮ这一距离可以采用速度对时间的积分来计算ꎬ在这一区间认为拖拉2019年2月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第2期机速度没有突变(急刹车情况除外)ꎬ则拖拉机实际的距离为st=n sd+sa=n sd+ʏvdt式中㊀v 拖拉机行驶速度ꎻ㊀sa 采用积分计算的距离ꎻ㊀Δt 相邻两个脉冲之间的时间间隔ꎮ计算出累计距离用于对靶标定位ꎬ控制系统为每个传感器建立1个数据缓冲区ꎮ当传感器检测到果树树冠时ꎬ输出高电平信号ꎬ控制器在上升沿信号触发下ꎬ记录当前行驶距离s1ꎬ则树冠检测开始点为s1ꎻ如果传感器端口恢复低电平ꎬ控制器检测不到树冠ꎬ控制器在下降沿信号触发下ꎬ记录当前行驶距离s2ꎬ则树冠检测停止点为s2ꎮ传感器检测范围为wse=s2-s1式中㊀wse 感应范围(cm)ꎻ㊀s1 感应起始点ꎻ㊀s2 感应终止点ꎮ由于传感器的检测范围有限ꎬ树冠一些地方超过了检测范围ꎬ传感器的检测宽度比树冠宽度要小ꎬ在进行喷药时ꎬ需要对这一宽度进行校准ꎬ设定喷药校准宽度为wj(可以通过触摸屏设置)ꎬ在检测树冠之前和之后都需要校准ꎮ由于传感器与喷药喷头不在一个工作面ꎬ控制器需要计算喷头喷药的起始点和终止点ꎮ设传感器与喷头的之间的距离为wLꎬ起始点和终止点采用下面公式计算ꎬ即sᶄ1=s1+wL-wjsᶄ2=s2+wL-wj式中㊀wj 校准宽度(cm)ꎻ㊀wL 传感器与喷头之间的距离(cm)ꎻ㊀sᶄ1 喷药起始点ꎻ㊀sᶄ2 喷药终止点ꎮ控制器为每个传感器建立了1个对应的缓存区ꎬ这些数据计算完之后存储到数组中ꎬ拖拉机在行驶中控制系统将不停地查询规格数据区ꎬ将喷药机的实时距离st与存储的数据进行对比ꎬ当到达喷药位置时ꎬ开启喷药ꎻ到达终止位置时ꎬ关闭喷药ꎮ根据单位面积地块的喷药量要求ꎬ单位面积(1m2)内的喷药量为K0ꎬ则K0=dRdSare式中㊀R 施药量(mL)ꎻ㊀Sare 面积(m2)ꎻ㊀K0 单位面积施药量(常量)ꎮ拖拉机喷药覆盖的面积等于喷药覆盖幅宽(La)乘以行驶距离ꎬ即Sare=La st=La ʏvdt式中㊀La 喷药覆盖幅宽ꎮ在行驶过程中ꎬ喷药机单位时间内的喷药覆盖面积根据如下公式计算ꎬ即dSaredt=La v则单位时间内的喷药量为Q=dRdt=dSaredt dRdSare=K0 La v式中㊀Q 喷药流量(mL/min)ꎮ由推导公式可知:单位时间内喷药量(喷药的流量)与拖拉机的实时速度v呈线性关系ꎮ控制系统根据行驶的速度调整喷药流量ꎬ从而达到变量喷药的目的ꎬ而喷药流量又与控制喷头电磁阀的频率与占空比之间存在线性关系ꎬ所以变量喷药的核心在于根据拖拉机的实时速度调整频率和占空比ꎮPLC采集速度值后ꎬ根据控制器内部计算ꎬ得出喷头对应控制的频率和占空比ꎬ通过Q0.0~Q0.5通道输出6路不同的PWM波ꎬ驱动电路根据PWM波驱动电磁阀的开闭ꎮPLC通过内部精准的1ms定时器产生中断ꎬ中断服务程序控制输出端的高低电平ꎬ产生精准PWM波ꎮ输出端口连接固态继电器的输入端ꎬ固态继电器的响应时间小于1msꎬ精度较高ꎬ满足快速要求ꎮ固态继电器的输出电路跟随PWM波形通断ꎬ进而控制电磁阀的开启和关闭ꎬ通过控制不同的频率和占空比来驱动电磁阀ꎬ调节喷头流量ꎬ达到变量喷药的目的ꎮ当电磁阀打开后ꎬ药液在高压下快速进入喷头ꎬ通过喷头后呈雾状散开ꎮ2㊀试验与结果分析2.1㊀果园靶标检测试验试验地点位于北京市昌平区小汤山镇国家精准农业研究示范基地ꎬ试验装置如图3所示ꎮ喷药机设计的传感器安装架采用了多孔设计ꎬ传感器固定臂可以调节安装高度ꎬ以适应不同果树的高度和树冠大小ꎮ2019年2月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第2期选取园内的樱桃树作为试验对象ꎬ根据樱桃树的大小ꎬ调节6个传感器的安装高度ꎬ使得1#与2#传感器的高度为0.8mꎬ3#与4#传感器高度为1.2mꎬ5#与6#传感器高度为1.6mꎮ选取4棵相邻的果树并为之编号ꎬ测量每棵树对应地面高度为0.8㊁1.2㊁1.6m时的树冠的实际宽度wcrꎮ传感器检测到树冠时ꎬ传感器会输出低电平ꎬ根据电平信号的下降沿记录树冠起始点ꎻ当传感器检测不到树冠时ꎬ传感器会输出高电平ꎻ根据电平信号的上升沿ꎬ记录树冠终止点ꎻ根据二者之间距离计算系统的检测宽度wseꎮ靶标检测试验结果如表1所示ꎮ图3㊀喷药实验装置Fig.3㊀Experimentaldevice表1㊀靶标检测试验结果Table1㊀Resultsoforchardexperiments试验号速度/m s-11#(高度80cm)树冠宽度/cm检测宽度/cm喷雾宽度/cm相对误差/%2#(高度120cm)树冠宽度/cm检测宽度/cm喷雾宽度/cm相对误差/%3#(高度160cm)树冠宽度/cm检测宽度/cm喷雾宽度/cm相对误差/%10.5416415418613.415013617315.311210213217.80.761641531767.31501361628.011210212612.51.161641511693.01501331574.71121021196.320.5421820424512.424523227010.223621926011.10.762182032399.62452322556.92362202547.71.162182032326.42452302402.02362192505.930.5423022026113.42882683159.423422526412.80.762302182519.12882673055.92342252559.01.162302182446.12882652962.72342232444.340.542952743187.83263043466.12842603057.40.762952723105.13263023373.42842562964.21.162952743012.13263003311.52842582902.1㊀㊀为了测量实际喷雾宽度ꎬ在树木两侧插上竹竿ꎬ竹竿与果树树干平行ꎬ并使宽度超过整个树冠1mꎻ分别在高度80㊁120㊁160cm的树冠位置挂上宽度为20cm的白色塑料纸ꎬ纸的分布沿着拖拉机运动方向ꎮ在进行喷药试验时ꎬ往喷药罐中加入50mL的罗丹明ꎬ使得喷雾药滴呈现红色ꎬ根据红色雾滴在白色条上的分布ꎬ可以测量实际的喷药宽度ꎮ根据试验结果数据ꎬ拖拉机在3种不同速度条件下ꎬ控制系统均能对果树树冠有效识别ꎬ靶标识别率为100%ꎮ对于同一区域的靶标ꎬ系统在不同速度条件下ꎬ测定靶标宽度基本相同ꎬ误差小于4cmꎮ所以ꎬ在拖拉机的行驶速度小于1.16m/s时ꎬ速度几乎不会影响红外传感器的靶标识别ꎮ根据对靶喷药的控制算法ꎬ喷药机首先探测靶标ꎻ探测到靶标后ꎬ记录靶标的位置ꎬ系统在行驶过程中不断地将行驶距离与存储的数据进行对比ꎮ为了保证整个树冠都在喷药范围内ꎬ必须提前开始喷药ꎬ而到达停止位置ꎬ还需要继续喷药ꎮ根据表1的试验结果ꎬ在本实验条件下控制系统对靶标识别后ꎬ均能实现对树冠的喷药覆盖ꎮ根据系统工作原理分析ꎬ红外传感器德检测靶标反应时间不大于1msꎬ控制器的执行速度也在ms级ꎬ电磁阀的响应时间为20msꎬ执行速度比较快ꎬ而拖拉机在果园作业速度一般不超过1.2m/sꎮ喷雾范围的误差主要是由于拖拉机行驶速度的检测误差㊁累计行驶距离误差㊁喷药执行延时及外界环境因素等造成的ꎮ对于同一靶标区域ꎬ行驶速度越大ꎬ喷药宽度越小ꎬ但是速度对检测宽度几乎没有影响ꎮ根据喷药控制算法ꎬ控制器是以实际检测的靶标宽度为控制基础的ꎬ在到达靶标之前提前一定的距离喷药ꎬ而在刚好没有靶标的位置还要继续喷药ꎬ宽度都是预先设定的ꎮ速度对于喷药宽度有影响ꎬ但是引起的绝对误差变化值相对较小ꎮ本次试验中ꎬ在设定宽度为15cm的条件下ꎬ随着速度的增大ꎬ喷药宽度会减小ꎬ喷药的相对误差也越小ꎬ最大误差17.8%ꎮ根据整体试验结果ꎬ在相同的速度及喷药设定宽度不变的情况下ꎬ靶标的树冠越大ꎬ喷药宽度的相对误差较小ꎮ这是因为即使速度条件改变时ꎬ控制器对靶喷药算法基于实际距离控制ꎬ实际喷药宽度没有发生显著的对应变化ꎬ树冠越大ꎬ农药的浪费也越小ꎮ2.2㊀果园变量喷药试验喷药机根据行驶速度实行变量喷药ꎬ为验证果园喷药变量调节ꎬ使用果园试验装置ꎬ测定不同速度下的喷头流量ꎮ设定每667m2地的喷药量为60Lꎬ调节压力阀门ꎬ使得喷雾压力为0.40MPaꎬ设定PWM驱动电路的频率为10Hzꎬ根据前面的推导公式ꎬ占空比与速度之间存在线性关系ꎮ喷雾机设定在自动喷药模式ꎬ拖拉机在4种不同的速度下行走ꎬ分别为慢速Ⅲ挡(0.39m/s)㊁慢速Ⅳ挡(0.54m/s)㊁快速Ⅰ挡(0.76m/s)及快速Ⅱ挡(1.16m/s)ꎬ采集单个喷头每分钟的喷药量ꎮ为了准确地测量喷药量ꎬ控制器采用了定时中断ꎬ开启喷药后开始计时ꎬ当喷药1min时停止喷药ꎮ采集喷药量采用了套袋收集法ꎬ体积计算采用了质量测量法ꎬ即采用精密电子秤测量收集到的液体质量ꎬ根据密度计算体积ꎻ每次测量3次ꎬ取3次的平均值作为实际喷药量ꎮ测量数据如表2所示ꎮ表2㊀变量喷药试验Table2㊀Resultsofvariableflowsprayingtest序号速度/m s-1理论喷洒流量/m s-1实际流量/m s-1误差/m s-1相对误差/%10.3970.267.62.63.720.5497.297.80.60.630.76136.8134.32.51.841.16200.5202.31.80.93㊀结论1)本文针对果树树冠设计的靶标探测器能探测喷药机两侧果树ꎬ根据喷雾宽度㊁延迟距离及拖拉机速度等参数计算出靶标喷雾范围ꎬ准确控制阀门进行对靶喷药作业ꎮ2)果园对靶实验表明:在行驶速度不大于1.16m/s时ꎬ传感器对树冠的检测几乎不受速度影响ꎻ在设定宽度15cm条件下ꎬ速度会影响喷药宽度ꎬ速度越快ꎬ喷药宽度的相对误差越小ꎮ3)果园变量喷药试验表明:根据速度调节喷头电磁阀占空比ꎬ可以有效调节喷药流量ꎬ实现变量喷药ꎬ单个喷头喷药流量误差不超过2.6mL/minꎬ最大相对误差3.7%ꎮ参考文献:[1]㊀王万章ꎬ洪添胜ꎬ李捷ꎬ等.果树农药精确喷雾技术[J].农业工程学报ꎬ2004ꎬ20(6):98-101.[2]㊀WalklatePJꎬCrossJVꎬRichardsonGM.ComparisonofDifferentSprayVolumeDepositionModelsUsingLIDARMeasurementsofAppleOrchards[J].BiosystemsEngineeringꎬ2002ꎬ82(3):253-267.[3]㊀李广志ꎬ周卓赟ꎬ谢昱勃ꎬ等.基于FPGA的阵列信号数据采集系统[J].电子技术应用ꎬ2016ꎬ42(2):71-73. [4]㊀王万章ꎬ洪添胜ꎬ陆永超ꎬ等.基于超声波传感器和DGPS的果树冠径检测[J].农业工程学报ꎬ2006ꎬ22(8):158-161.[5]㊀李丽ꎬ宋坚利ꎬ何雄奎.农作物喷雾靶标自动探测器设计与应用[J].农业机械学报ꎬ2010ꎬ41(7):54-56. [6]㊀邓巍ꎬ丁为民ꎬ何雄奎.PWM间歇式变量喷雾的雾化特性[J].农业机械学报ꎬ2009ꎬ40(1):74-78.[7]㊀LeeWSꎬAlchanatisVꎬYangCꎬetal.Sensingtechnologies ̄forprecisionspecialtycropproduction[J].ComputersandElectronicsinAgricultureꎬ2010ꎬ74(1):27-33. [8]㊀邹建军ꎬ曾爱军ꎬ何雄奎ꎬ等.果园自动对靶喷雾机红外探测控制系统的研制[J].农业工程学报ꎬ2007ꎬ23(1):129-132.[9]㊀翟长远ꎬ赵春江ꎬ王秀ꎬ等.树型喷洒靶标外形轮廓探测方法[J].农业工程学报ꎬ2010ꎬ26(12):173-177.[10]㊀邹伟ꎬ李丽ꎬ王秀ꎬ等.基于PWM调速的变流量喷药系统[J].农机化研究ꎬ2011ꎬ33(2):163-166.[11]㊀刘大印ꎬ王秀ꎬ毛益进ꎬ等.基于单片机PWM变量农药喷洒控制系统的研究[J].农机化研究ꎬ2011ꎬ33(5):99-103.DesignandTestofControlSystemforAutomaticVariableTargetSprayerUsedinOrchardZouWei1ꎬ2ꎬWangXiu1ꎬ2ꎬGaoBin3ꎬ4ꎬFanPengfei3ꎬ4ꎬSuShuai1(1.BeijingResearchCentreofIntelligentEquipmentforAgricultureꎬBeijing100097ꎬChinaꎻ2.NationalResearchCen ̄terofIntelligentEquipmentforAgricultureꎬBeijing100097ꎬChinaꎻ3.KeyLaboratoryofAgri-informaticsꎬMinistryofAgricultureꎬBeijing100097ꎬChinaꎻ4.BeijingKeyLaboratoryofIntelligentEquipmentTechnologyforAgricultureꎬBei ̄jing100097ꎬChina)Abstract:Accordingtothecurrentstatusoforchardsprayingꎬapesticidesprayingcontrolsystemoftargetingvariableoforchardwasdesigned.WhilethetractoristravelingꎬthesystemcalculatesthemovingspeedbyaHallsensorꎬdetectsfruitcrownbysixinfraredsensors.Havingobtainingsuchinformationꎬthecontrolleradjusttheflowofnozzlesbychan ̄gingthefrequencyanddutycycleofthesolenoidvalvesꎬthemachinecouldbevariablesprayingbasedontargetdetec ̄tion.Targetsprayingtestsinoutdoorenvironmentsshowedthatallfruittreeswithintherangeofsensordetectioncanbedetectedꎬtherateofsprayingcoverageis100%.Therelativeerrordoesnotexceedthewidthofsprayingof17.8%ꎬwhenthetractorspeedisnotgreaterthan1.16m/h.Whenthetravellingspeedisnotgreaterthan1.16m/sꎬforthesametargetareaꎬtestsatdifferentspeedsshowthatthedetectionwidthisalmostthesame.Underthesameconditionsꎬifthema ̄chineisrunningfasterꎬtherelativeerrorofsprayingwidthissmaller.Keywords:orchardꎻtargetsprayꎻtargetdetectingꎻPWM(上接第163页)AbstractID:1003-188X(2019)02-0159-EATheDesignandDevelopmentofGrapeComprehensiveFertilizingMachineZhaoRunliangꎬZengBaoningꎬLinagJuꎬYangYe(MechanicalandElectricalEngineeringDepartmentofNingxiaIndustrialandCommercialVocationalTechnicalCollegeꎬYinchuan750021ꎬChina)Abstract:ThispaperdesignandmakethemachineofsubmergingsoilsforgrapevinesbasedongrapeplantingpatterninNingxia.ThemachinemainlyappliestowinterburiedgrapevinesintheeasternfootofHelanmountainofNingxiaandensureitswinterfreeze.ThemachineRrotarypinebyrotaryknifeandcompletetherotaryingꎬthrowingꎬconveyingsoilandwithdrawalonthegrapevinesꎬItcansubmergesoilsforGrapevinesandcannotinjurythegrapevines.Theauthorcompletethemajorpartofcomputationaldesignꎬmakeaprototype.Themachinestructuredesignisreasonableꎬcompactlayoutꎬappearanceꎬandlowcost.Inthisarticleprototypeistestꎬtestresultsmeetthedesignrequirements.TheNingxiaagriculturalextensionstationexaminationandobtainpromotionallicense.Keywords:grapeꎻmanurespreaderꎻorganicfertilizer2019年2月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第2期。
一种精确探测靶标的喷药机[实用新型专利]
![一种精确探测靶标的喷药机[实用新型专利]](https://img.taocdn.com/s3/m/4339ebca192e45361166f502.png)
专利名称:一种精确探测靶标的喷药机
专利类型:实用新型专利
发明人:邹伟,王秀,马伟,王松林,张志强,张睿申请号:CN201320630142.7
申请日:20131012
公开号:CN203492640U
公开日:
20140326
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种精确探测靶标的喷药机,其包括:喷药系统;用于探测喷洒靶标的探测装置;以及分别与喷药系统和探测装置连接的控制系统;其中所述探测装置主要由传感器阵列组成。
本实用新型的喷药机采用多个传感器组成传感器阵列,以提高靶标探测的精确度,确保有靶标时喷药,无靶标时停止喷药,可对各种靶标做到精确探测并实施喷药;同时本实用新型的喷药机融合了人体感应装置,当探测到有人时,停止喷药作业,以免对人造成伤害。
申请人:北京农业智能装备技术研究中心
地址:100097 北京市海淀区曙光花园中路11号农科大厦A座318b
国籍:CN
代理机构:北京路浩知识产权代理有限公司
代理人:孟宪功
更多信息请下载全文后查看。
对靶喷雾红外探测器的设计与探测距离测试

未沉积在靶标区域 , 而是直接 流失到环境中 , 造成农药浪费和
影响等结论。
1 设备 及 原 理
环境污染
。将连续性施药转 变为 间歇性 自动对靶施药是
红外探测 系统分为红外发射 单元 、 红 外接收单元 和微 处 理器单元组成 。红外发射单 元主要包括正 弦波振荡 电路 、 加
法器 电路 、 压控 电流源电路等 ; 红外接收单元主要包括 电流 电 压转换 电路 、 窄带滤波 电路 、 精密全波整流 电路等 ; 微处理器
摘要 : 为克服果园农作物非对靶喷施农 药造成 的缺 陷 , 设计 了 1 种 基于模拟正 弦调制的红外靶标探测 系统 , 对农 作 物采用 自动对靶 喷雾 , 将连续性施 药转 变为间歇性对靶施药 , 并对不同试 验条 件对探测距离 的影 响进行 了分析 。试 验结 果表明 , 所设计的系统可对农作物靶 标进行 自动探测 , 探测距离受多种试验因素影响。 关键词 : 红外 ; 靶标探测 系统 ; 探测距 离 ; 果 园; 对靶 喷药
基金项 目: 国家“ 8 6 3 ” 计划( 编号 : 2 A A 1 0 1 9 0 4 ) 。 作者简介 : 刘金龙( 1 9 8 4 一) , 男, 河北保定人 , 硕士 , 助教 , 主要从事计 算机模拟控制方面的研究。E— m a i l : 3 3 8 2 6 6 2 3 @1 6 3 . C O I T I 。 通信作者 : 丁为 民, 男, 安徽合肥人 , 教授 , 博士生导师 , 主要从事设施
中图分类号 : ¥ 4 9 1 文献标 志码 :A 文章编号 : 1 0 0 2—1 3 0 2 ( 2 0 1 3 ) 0 7— 0 3 6 8— 0 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绪论引言中国加入WTO已经七年之久,我国的水果产品贸易也进入了一个全新的发展阶段,国际化的水果产品市场对水果的安全和质量提出了更高的要求[1,2,3],我国水果产品生产正面临着质量和市场的双重挑战。
以农药残留检测为主的绿色技术壁垒成为当前乃至今后较长时期内我国水果生产和出口的主要障碍。
我国植保机械和农药使用技术严重落后的现状严重的妨碍了果树病虫草害的防治,带来了诸如农药有效利用率低、水果产品中农药残留超标、环境污染、作物药害、操作者中毒等负面影响,造成了不应有的损失以及其他不良后果,到了非引起高度重视不可的时候。
由于日趋恶化的全球生态环境问题,以保护生态环境、生产绿色果品为主的思路己成为世界果树生产的主题。
利用现代先进的科学技术, 结合传统的精耕细作进行果树的种植管理, 以及病虫害的综合防治, 生产绿色食品是中国水果打开“绿色通道”,走向国际市场的重要一步。
如何提高农药的有效利用率, 降低农药在非靶标环境中的投放量, 是农药使用技术在21世纪的主要研究内容。
最终研制出高可靠性、安全性及方便性, 并且满足越来越高的环保要求,实现低喷量、精喷洒、少污染、高工效、高防效的果园作业机械是摆在农机研究人员面前的一个亟待解决的任务。
本论文的主要内容正是基于我国水果产业所面临的机遇和挑战,尤其是以农药残留检测为主的绿色技术壁垒给我国水果产业带来的挑战,对国内外植保机械的研究现状和发展方向进行了简单的研究,尤对国内外现行的先进的施药技术和设备进行了重点的研究,并结合杨老师的项目课题要求,对对靶喷雾技术进行了更深层次的研究分析。
在对近20年对靶喷雾技术的研究成果进行研究的基础之上,尤其是其在果园上应用,把对靶喷雾技术中的探测技术作为本论文的研究内容。
就目前而言,基于实时传感器的对靶喷雾探测技术常用的检测手段有CCD图像探测技术、红外探测技术和超声波探测技术。
CCD图像传感技术虽然检测精度较高,但是由于实时性相对较差,并且相应的配套设施较多,造成了费用较高,因此就大大限制了在小型果园上的应用;超声波技术由于存在着探测盲区,因此在近距离检测的时候精度较差,并且一套超声波收发设备价格也相对较高,由于本装置对检测精度的要求也不是很高,因此采用了相对廉价、探测精度适中的红外探测技术作为果园对靶喷雾机的对靶探测技术的探测手段。
第一章简单介绍了国内外植保机械的研究现状,概括了我国植保机械的特点,并介绍了目前几种较为先进的农药施用技术;第二章对施药技术中的先进技术----对靶喷雾技术的国内外研究现状进行了综述,最后提出了我国对靶技术的发展重点;第三章概述了本文中用到的红外探测技术的光电探测技术,并对红外光电探测器的组成和工作原理进行了简要的介绍;第四章在前面三章的基础上,完成了高效仿形对靶喷药装置传感探测部分的红外探测电路的设计。
详细的阐述了电路的工作模块和工作原理,总结了整个红外探测装置从设计到制作再到试验的整个过程。
最后,对试验结果进行了分析,提出了本红外探测装置的不足之处和改进方法。
第一章植保机械概述1.1 国内外农药喷雾机械的研究现状1.1.1国内的研究状况一份农业部于2002年做的关于我国的植保机械与施药技术现状的研究报告表明[4]:我们的植保机械目前有20多个品种、80多个型号,其中80%左右处于发达国家20世纪50-60年代的水平,而相当于国外90年代的较为先进的植保机械还不足10%。
常用的机具仍是几十年前的老三样:单管喷雾器、压缩式喷雾器以及背负式喷雾器。
并且存在着严重的“跑、冒、滴漏”现象和较高的故障率。
总的来说,目前的施药机械的特点就是[4,5,6]:(1)施药机具及喷洒部件落后、型号品种单一、远远不能满足不同作物、不同病虫害防治的需要。
从而造成农药的使用量过大,农药浪费、农产品中的农药残留超标,对环境也造成了很大的污染,也使操作人员中毒的事故率大增。
(2)现有喷雾机及喷洒部件不满足现代多元农药科学使用的要求。
仅以喷头为例,虽然化学除草剂发展很快,但由于没有与之配套、质量好的扇型喷头,使除草效果大大降低,单位面积上使用的除草剂剂量增加,飘失的除草剂还造成周围敏感作物的药害。
(3)现有植保机械工效低,对暴发性病虫害缺乏应急防治能力。
我国单一的植保机械品种不能适应病虫害适时防治和应急防治,从而延误时机。
很多的农业灾害都是由于应急能力不足而造成了严重的损失。
当然,我国的植保机械从建国前的一穷二白到现在也有了长足的发展。
尤其是进入20世纪90年代以来,随着人们对可持续发展和生态农业的观念日益提高,我国对农药喷施和雾化机械的研究也逐渐深入[7]。
江苏大学的张继先(1995)率先采用正交试验的方法对机动喷雾机悬架进行了优化设计,并建立了影响喷雾质量的喷雾机悬架的动态模型;王旭(1996)等人对影响喷雾机工作性能的因素进行了试验和总结;王文元等人(1994)对微喷头布置形式对喷雾均匀度的影响进行了研究,并提出了优化的对不同喷头型式的布置参数;汤伯敏等人(2001)研制了气液二相流喷头并进行了雾化性能和药液物理特性的相关试验;何雄奎等人(2002)就喷雾机风速对雾滴在果树内沉积分布的影响进行了研究,结果显示风速越大,雾滴的穿透性和沉积量越大。
当然,有关的理论研究还有很多,在这里不能一一列举。
结合这些先进的理论,目前我国先进的施药技术主要有:1)静电喷雾技术[8,9]静电喷雾技术是应用高压静电在喷头与喷雾目标间建立静电场,而农药液体经喷头雾化后,通过不同的充电方法被充上电荷,形成群体荷电雾滴,然后在静电场力和其他外力的联合作用下,雾滴作定向运动而吸附在目标的各个部位,达到沉积效率高、雾滴飘移散失少、改善生态环境等良好的性能。
在这方面,江苏理工大学的高良润、清华大学的杨学昌以及南京林业大学的郑加强对静电喷雾的治虫效果、实现方法和沉积效果进行了一些研究。
图1-1 静电喷雾系统Fig 1-1 System of the detecting electrostatic spraying2)视觉喷雾技术[10]基于地图的精确喷雾是应用全球定位系统(Global positioning system , GPS) 确定田间位置坐标, 根据预先准备的变量施药图安排喷雾作业,从而实现针对病虫害区域的农药喷施。
华南农业大学的洪添胜等人对基于DGPS的农药在葡萄园中喷施分布质量进行了一些研究,得到一些有益的结论[11,7]。
3)风送低量喷雾技术[8]风送低量喷雾技术是利用液力先将药液雾化,然后运用强大的气流将压力雾化或离心雾化的药液雾滴吹向目标物。
由于气流对枝叶的翻动作用,可使作物的页面、叶背、上下、内外都均匀地覆盖上药液,由于雾滴在气流的强制作用下飞向果树,可防止自然风的干扰而产生环境污染。
这种喷施方法不仅使果树上喷施的药液量大为减少, 还提高了药液在靶标上的覆盖密度和均匀度。
何雄奎等人(2002)对风速对雾滴在果树内沉积分布的影响进行了研究[12]。
图1-2 风送静电喷雾系统Fig 1-2 Air assisted electrostatic spray system4)对靶喷雾技术[13]对靶喷雾就是只对目标喷雾,对于非目标(靶标)不喷雾或者尽量少喷雾的技术(此处的靶标一般指的是果树的枝叶)。
对靶喷雾可以改善果园传统的连续喷药时农药有效利用率低的状况,并且减少农药对环境的污染,在这方面目前国内的研究很多。
下面有详细的论述。
在对国外的先进成果进行转化和吸收之后,然后进行自主创新是我们施药机械发展的必由之路,我国的植保机械发展的趋势如下[4,5,6,14]:A.研制生产具有国际水平的手动和小型机动植保机械。
结合我国的实际国情,适合于小型农户的机械在很长的一段时间内仍有广阔的市场,应当尽快提高这类机具的技术水平并推出更多的新型产品。
B.研制开发大中型植保机械设备。
大中型设备具有高效、低污染、便于自动控制等诸多优势,随着我国农业生产集约化程度的提高,这类机具将是未来植保机械的主力军。
风送式大中型喷杆喷雾机、风送式果园喷雾机、航空喷雾设备必将在植保设备中占有很重要的一席。
C.微低量喷雾、全密封自动混药、气帘风送、自动控制以及静电喷雾等一些新的较为先进的技术将会得到逐步的应用。
同时,和植保机械相关的新的材料、新的工艺水平都会有一定的发展,进而推动植保机械的全面发展。
D.针对我国幅员辽阔、地域差异较大的特点,应开发适应于不同地域、不同环境要求的系列化植保机械。
而且针对植保机械的系列化程度较低的现状,产品的系列化也是一个急需解决的问题。
E.随着农业产业结构的调整,我国的经济作物种植面积设施农业面积将逐步扩大,为满足特定的需要,开发专用植保机械将成为未来设计的热点。
1.1.2 国外的研究状况由于国外的植保机械的研究普遍较早,因此理论研究成果也比较多,应用技术也比较成熟,对农药精确喷施和喷雾技术的研究也较为深入和全面[7]。
从喷头的结构和形式到喷杆的运动模型及布置形式;从喷雾沉积效率到低容量的喷雾效果,都有着较为深入的研究。
其中尤以美国、法国、德国、意大利、丹麦、日本等发达国家为代表。
日本在果园和温室中发展无人操作喷雾机。
利用遥控直升机施撒农药已进入实用阶段[15]。
德国十分重视生态环境问题,植保机械在德国被列为高科技产品(王卫国,1998),并采取一系列高科技技术措施减少农药漂移和地面无效沉积,以提高农药有效利用率,这些技术措施主要有: 定向对靶喷雾技术、精确喷雾技术、可控雾滴施药技术和农药回收技术[16]。
美国的静电喷雾设备日趋完善,Bertelli、Randell公司生产的静电喷头使用12V 直流电源,能够产生40kv的高压,可用于喷杆喷雾机和背负式机动喷雾喷粉机上,该喷头与普通喷头相比,可减少药液损失约65%,大大降低了农药对环境的污染[17]。
丹麦哈迪公司生产的ALPHA 2000型风送式喷杆喷雾机采用气力辅助喷雾技术,利用风机产生强大气流,经软性气袋斜下方小孔产生下压气流,将雾滴带入株冠中,提高了雾滴在作物各个部位的附着量,增强了雾滴的穿透性,使其可穿入浓密的作物中。
作业时喷雾装置还可根据需要变换前后角度,大大降低了农药漂移污染[18,15]。
总的来说,国外的植保机械呈现以下特点:1)形成了以大型植保机械和航空植保机械为主体的防治体系;2)植保机械技术先进,配套齐全;3)研究重点在于发展安全施药,保护生态环境;4)以化学防治为主体,同时积极发展综合防治技术。
1.2总结从实际出发,我们必须承认,我们的植保机械和技术仍处在起步阶段,和世界先进的植保技术相比我们的差距还是相当大的。
因此,借鉴国外先进的技术和经验,进行先进喷雾技术深入研究,然后进行自主创新最终创出属于自己的技术和设备是我们发展植保机械的必经之路。