自动控制原理 第十四讲 可控性和可观测性
可控性与可观性
现
代
控
制 理 论
【例】
2
x
0
1 1
x
1 0
u,
试判别状态可控性
解:
Qc [b
1 Ab] 0
2
0
,
rankQc 1 n
∴系统不可控。
Modern Control Theory
Page: 5
连续时间系统状态完全可控的条件
现
代 控
定理2:
定理2
制 理
设连续时间系统 x Ax Bu, 系统状态完全可控的充要条件为:
理 论
y 1 0 x
解:上述动态方程可写成:
x1 x 2
x1 2x2
2u
y x1
输入u不能控制状态变量 x1,所以状态变量 x1是不可控的;
从输出方程看,输出y不能反映状态变量 x2 ,所以状态变量 x2 不能观测。
Modern Control Theory
Page: 3
状态完全可控的条件
在S平面上状态完全可控的条件
现
代
完全可观测性条件也可用传递函数或者传递矩阵阐述。完全
x
5 u
0 0 1 7
(3)
(4)
7 0 0 0 1
7 0 0 0 1
x
0
5
0
x
4
0 u
x
0
5
0
x
0
0 u
0 0 1 7 5
0 0 1 7 5
解:
(1)状态方程为对角标准型,B阵中不含有元素全为零的行,故系统是可控的。
(2)状态方程为对角标准型,B阵中含有元素全为零的行,故系统是不可控的。
C
实验三 系统的可控性与可观测性分析
实验三系统的可控性与可观测性分析一、实验目的1.巩固控制系统能控、能观等知识;控制系统的最小实现和控制系统的能控、能观测标准型等基础知识;2.掌握使用MATLAB 判定系统可控性与可观测性的方法;3.掌握使用MATLAB 控制系统的标准型实现;4.通过Matlab 编程,上机调试,掌握和验证所学控制系统的基本理论。
二、实验原理与步骤(一)、可控性和可观测性的定义1.可控性的定义若对状态空间的任一非零状态x(t0),都存在一个有限时刻t1>t0和一个容许控制u[t0,t1],能在t1时刻使状态x(t0)转移到零,则称状态方程XAX BU =+ 在t0时刻是可控的。
反之称为在t0时刻不可控。
2.可观测性的定义定义:若对状态空间中任一非零初态x(t0),存在一个有限时刻t1>t0,使得由输入u[t0,t1]和输出y[t0,t1]能够唯一确定初始状态x(t0),则称动态方程XAX BU Y CX DU=+=+在t0时刻是可观测的。
反之称为是不可观测的。
(二)、可控性和可观测性判据1、可控性构造一个相似变换矩阵1(,,,)n c T B AB A B -= 公式中,n 是系统的阶次;矩阵c T 称为系统的可控性变换矩阵。
矩阵c T 可以由控制系统工具箱中提供的()ctrb 函数来产生。
其调用格式为(,)c T ctrb A B =公式中,c T 的秩,即()c rank T 称为系统的可控性指数,它的值表示系统中可控制的状态的数目。
如果()c rank T n =,则系统是完全可控制的。
【例题1】考虑系统的状态方程模型为0100001010001000502x x u ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦分析系统的可控性。
A=[0,1,0,0;0,0,-1,0;0,0,0,1;0,0,5,0]B=[0;1;0;-2]Tc=ctrb(A,B)rank(Tc)结果如下:>>rank(Tc)ans =4可见,系统完全能控。
自动控制原理(课件)
例:下图所示网络,设 x1 u C1 , x 2 u C2 ,输出 y x 2 。
4
二、 线性系统的可控性与可观测性(4)
当 R1 R2 , C1 C 2 且初始状态 x1 (t 0 ) x 2 (t 0 )时,则不论将 输入 u 取为何种形式,对于所有 t t 0 ,只能是 , x1 (t ) 不可能做到 x 2 (t ) 。也就是说,输入 能够做到使 u x1 x1 (t ) x 2 (t ) 和 同时转移到任意相同的目标值,但不能将 和 分别 x2 x 1 x2 转移到不同的目标值。这表明此电路不完全可控,简称电路 不可控。由于 ,故系统可观测。
R3 R4 1 R1 R 2 x1 R R R R L 1 2 3 4
1 x1 u L
1 1 1 x2 R R R R x2 C 1 2 3 4
17
二、 线性系统的可控性与可观测性(17)
可控性矩阵为
A 其中, (t ), B(t ), C (t )和D(t ) 分别为 (n n), (n p), ( q n)和( q p) 的满足状态方程解的存在惟一性条件的时变矩阵。状态方程 的解为 t
x(t ) (t, t 0 ) x 0 (t, ) B( )u( )d
t
t0
ui (t ) dt ,
2
t 0 , t Tt
7
二、 线性系统的可控性与可观测性(7)
此外,对于线性时变系统,其可控性与初始时刻 t 0的选取有 关,是相对于 T t 中的一个取定时刻来定义的。而对于线性定 常系统,其可控性与初始时刻 t 0 的选取无关。 状态与系统可达: 若存在能将状态 x(t 0 ) 0 转移到 x (t f ) x f 的控制作用,则称状态 x f 是 t 0 时刻可达的。若 x f 对所有时刻都是可达的,则称状态 x f 为完全可达或一 致可达。若系统对于状态空间中的每一个状态都是 t 0时刻可 达的,则称该系统是 t 0 时刻状态完全可达的,或简称该系统 是 t 0 时刻可达的。 对于线性定常连续系统,可控性与可达性是等价的。但 对于离散系统和时变系统,严格地说两者是不等价的。
《自动控制原理》线性系统的可控性与可观测性
将状态 x(t0 ) = 0 转移到 x(t f ) =x f 的控制作用,则称状态 x f 是 t0 时刻 可达的。若x f 对所有时刻都是可达的,则称状态x f 为完全可达或 一致可达。若系统对于状态空间中的每一个状态都是时刻 t0 可达的, 则称该系统是 t0 时刻状态完全可达的,或简称该系统是 t0 时刻可达
可观测性问题: 相应地,如果系统所有状态变量的任意形式 的运动均可由输出完全反映,则称系统是状态可观测的,简称为系 统可观测。反之,则称系统是不完全可观测的,或简称为系统不可 观测。
可控性与可观测性概念,是卡尔曼于20世纪60年代首先提出 来的,是用状态空间描述系统引伸出来的新概念,在现代控制理论 中起着重要的作用。它不仅是研究线性系统控制问题必不可少的重 要概念,而且对于许多最优控制、最优估计和自适应控制问题,也 是常用到的概念之一。
在研究可观测性问题时,输出 y 和输入 u 均假定为已知,只有初始
状态 x0 是未知的。因此,若定义
t
y(t) = y(t) − C(t) (t, )B( )u( )d − D(t)u(t) t0
则式(9-79)可写为
y(t) = C(t)(t,t0 )x0
(9-80)
这表明可观测性即x0 可由 y 完全估计的性能,由于 y 和 x0 可任意取
y = −6x2
这表明状态变量 x1 和 x2 都可通过选择控制量 u 而由始点达到原
点,因而系统完全可控。 如何判别?
但是,输出 y 只能反映状态变量 x2 ,而与状态变量 x1 既无直
接关系也无间接关系,所以系统是不完全可观测的。如何判别?
变化:(1)b1=0 ? (2)a12≠0 ? (3) a21≠0 ?
值,所
§8.4 线性系统的可控性和可观测性
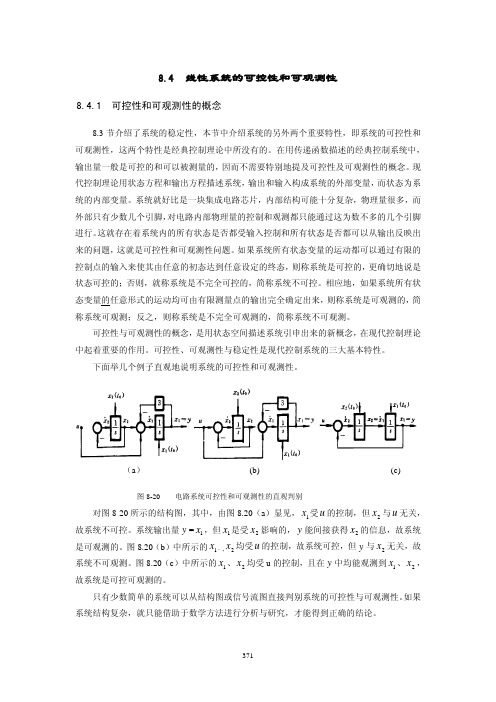
下面举几个例子直观地说明系统的可控性和可观测性。
(a)
(b)
(c)
图 8-20 电路系统可控性和可观测性的直观判别
对图 8-20 所示的结构图,其中,由图 8.20(a)显见, x1 受 u 的控制,但 x2 与 u 无关, 故系统不可控。系统输出量 y = x1 ,但 x1 是受 x2 影响的, y 能间接获得 x2 的信息,故系统 是可观测的。图 8.20(b)中所示的 x1 、, x2 均受 u 的控制,故系统可控,但 y 与 x2 无关,故 系统不可观测。图 8.20(c)中所示的 x1 、 x2 均受 u 的控制,且在 y 中均能观测到 x1 、 x2 ,
(8-94)
可控性矩阵为
S2 = ⎡⎣G Φ G L Φ n-1G ⎤⎦
(8-95)
⎡u(n −1)⎤
Δ x = ⎣⎡G
ΦG
L
Φ n−1G ⎤⎦
⎢ ⎢
M
⎥ ⎥
⎢⎣u(0) ⎥⎦
(8-96)
该阵为 n × np 矩阵,由于列向量 u(n −1),L, u(0) 构成的控制列向量是 np 维的,式(8-96) 含有 n 个方程和 np 个待求的控制量。由于 Δx 是任意的,根据解存在定理,矩阵 S2 的秩为 n
⎡ u0 ⎤
n−1
∑ e− Atf Δ x = Ambum = ⎡⎣b m=0
Ab
L
An−1b ⎤⎦
⎢ ⎢ ⎢
u1 M
⎥ ⎥ ⎥
⎢⎣un
−1
⎥ ⎦
(8-103)
《自动控制原理》 线性离散系统的可控性和可观测性
于n个采样周期。
例9-19 设单输入线性定常离散系统状态方程为
1 0 0
1
x(k
+ 1)
=
0
2 − 2 x(k) + 0u(k)
−1 1 0
1
试判断其可控性;若初始状态 x(0) = 2 1 0T ,确定使 x(3) = 0 的控
制序列 u(0),u(1),u(2); 研究使 x(2) = 0 的可能性。
3)如果离散时间系统(9-135)或(9-136)是相应连续时间
系统的时间离散化模型,则其可控性和可达性是等价的。
上述等价条件的简单证明可参阅有关参考文献,此处不在详述。
(3)线性定常离散系统的可控性判据
设单输入线性定常离散系统的状态方程为
x(k +1) = Gx(k) + hu(k)
(9-137)
系统在时刻 l 是完全可观测的.
(2)线性定常离散系统的可观测性判据
设线性定常离散系统的动态方程为
x(k +1) = Gx(k) + Hu(k), y(k) = Cx(k) + Du(k) (9-153)
其中 x(k) 为n维状态向量, y(k)为q维输出向量,其解为
k −1
x(k) = G k x(0) + G k−1−i Hu(i) i=0
由 x(1) = Gx(0) + Hu(0) = 0 可得
0 − 2 1 0 0
−1 2
x(0) = −G −1Hu(0) = −0 1
−1 2 3
0 0 − 21
1 0
u1 u2
(0) (0)
=
0 2
1 u1(0) −23u2 (0)
自动控制原理状态观测器知识点总结
自动控制原理状态观测器知识点总结自动控制原理状态观测器是自动控制系统中的重要组成部分,用于实时地获取、估计和观测系统的状态信息。
在控制系统中,状态观测器的设计和性能直接影响系统的响应速度、稳定性和精度。
本文将对自动控制原理中的状态观测器进行知识点总结。
一、状态观测器的基本概念在自动控制系统中,状态观测器的主要作用是通过利用系统的输出信号来估计系统的状态变量,从而实现对系统状态的观测和监测。
状态观测器的设计目标是在系统的输出信号和已知的输入信号的基础上,使用数学模型来估计未知的状态变量。
二、状态观测器的数学模型状态观测器的数学模型通常由状态方程和输出方程组成。
状态方程描述了系统状态的动态变化规律,而输出方程描述了系统输出与状态之间的关系。
通过状态方程和输出方程,可以得到一个关于状态变量的估计值,从而实现对系统状态的观测。
三、状态观测器的设计原则1. 可观测性:系统的状态观测器设计需要满足可观测性的要求,即系统的状态变量可以通过系统的输出信号来观测和估计。
如果系统是可观测的,那么可以设计一个状态观测器来实现对系统状态的观测和估计。
2. 稳定性:状态观测器设计需要保证系统的稳定性,即系统的状态估计值与实际状态之间的差距趋于稳定。
稳定的状态观测器可以确保系统的控制效果和性能。
3. 收敛速度:状态观测器的设计需要考虑观测误差的收敛速度,即状态观测器对系统状态的估计速度。
较快的收敛速度可以更准确地估计系统的状态,提高控制系统的响应速度和精度。
四、常见的状态观测器算法1. 卡尔曼滤波器:卡尔曼滤波器是一种最优的状态观测器算法,适用于线性离散系统和线性连续系统。
卡尔曼滤波器通过递推方式对系统的状态进行估计,具有较好的稳定性和收敛速度。
2. 扩展卡尔曼滤波器:扩展卡尔曼滤波器是对非线性系统进行状态观测的一种方法。
它通过使用线性化的状态方程和输出方程,结合卡尔曼滤波器的思想进行状态估计。
3. 粒子滤波器:粒子滤波器是一种基于蒙特卡罗方法的非线性状态观测器算法。
§9-8 系统的可控制性与可观测性
三.可控、可观性与系统转移函数之关系
由转移函数表达式: 由转移函数表达式: H(s) = C(sI − A)−1 B + D 经非奇异变换而对角化: 经非奇异变换而对角化:
∧ H(s) = C(sI − A) B + D = C sI − A B+ D 则有: 暂且不考虑与输入信号直接相联系的 D ,则有: −1 ∧ ∧ −1 ∧
3.单输入、 3.单输入、单输出系统可控性的 A矩阵约当规范型判据 单输入
B 为约当规范型中, 即:若在 A为约当规范型中,与每个约当块最后一行 相应的那些行不含零元素,则系统完全可控。 相应的那些行不含零元素,则系统完全可控。
二.系统的可观性定义、判别法
可观性 当系统用状态方程描述,给定控制后, 当系统用状态方程描述,给定控制后,能在有限的时 间间隔内 (0 < t < t1 ) 根据系统输出惟一地确定系统的所 有起始状态,则系统是完全可观。 有起始状态,则系统是完全可观。如果只能确定部分 起始状态,则系统不完全可观。 起始状态,则系统不完全可观。 可观性判别法 1.根据状态方程的参数矩阵判别 1.根据状态方程的参数矩阵判别 d 设系统的状态方程 λ (t ) = Aλ (t ) + Be(t )
§ 9.8 系统的可控制性 与可观测性
•系统的可控性定义、判别法 系统的可控性定义、 系统的可控性定义 •系统的可观性定义、判别法 系统的可观性定义、 系统的可观性定义 •可控、可观性与系统转移函数之关系 可控、 可控
一.系统的可控性定义、判别法
可控性:当系统用状态方程描述时, 可控性:当系统用状态方程描述时,给定系统的任意 初始状态,可以找到容许的输入量(即控制矢量), 初始状态,可以找到容许的输入量(即控制矢量), 在有限的时间之内把系统的所有状态引向状态空间的 原点(即零状态)。则系统是完全可控制的。 )。则系统是完全可控制的 原点(即零状态)。则系统是完全可控制的。如果只 有对部分状态变量可以做到这一点, 有对部分状态变量可以做到这一点,则系统不完全可 控制。 控制。 判别法 1.根据状态方程的参数矩阵判别 1.根据状态方程的参数矩阵判别 设系统的状态方程
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Controllability to observability through the transformation
A→A
T
Observable canonical form
− a1 1 − a 0 2 dz . . = . dt a − n−1 0 − an 0 y = 1 0 0... ... 0 b1 1 0 b2 . . z + u . 0 1 0 0 bn 0 z + Du
Cancellation of Poles and Zeros
Formal calculations with Laplace transforms sometimes leads to cancellation of poles and zeros. Consider the system
dy du = dt dt
c K. J. Åström August, 2001 3
Disturbance Observer
The following system has been used to model constant load disturbances
dx = Ax + B (u + v) dt dv =0 dt y = Cx
Duality
Controllability of
dx = Ax + Bu dt is the same as observability for
dx = AT x dt y = BTx
Canonical Forms
Controllable canonical form
− a1 − a2 . . . − an 1 1 0 0 0 dz 0 1 0 = z+ u . . . dt . . . 0 0 0 0 y = b1 b2 . . . bn z + Du
dx ˜ + B ( Lxm + lr r) = ( A − B L) x + B x dt ˜ dx ˜ = ( A − K C) x dt
The transfer function is given by the subsystem Sco
Observer error not controllable from r. Makes a lot of sense because we do not want reference signals to generate observer errors!
→ y(t) = u(t) + constant
The system can be written as
d dt x v
Take Laplace transforms (assuming all initial values zero)
A 0 B 0 0) x v x v
=
+
B 0
u
sY (s) = sU (s), → Y (s) = U (s)
Example of Cancellation
Consider the system
Example of Cancellation ...
Introduce the state representation
dx1 = −ax1 + ( b − a)( x2 + u) dt dx2 = −bx2 + ( a − b)u dt y = x1 + v = x1 + x2 + u v = x2 + u
Lecture 14 - Controllability and Observability
K. J. Åström 1. Introduction 2. The Concepts 3. Structure of Linear Systems 4. Cancellation of Poles and Zeros 5. Summary
Prototype of Non-controllable System
Two identical systems driven by the same input. Intuitively: no way to make the systems move in opposite ways. A simple example
xo x0 ¯
y = ( C1
where the state vector has been partitioned as x T
co ¯ x co x=
where the states xo are observable and xo ¯ not observable (quiet)
-Soc u Soc
System with State Feedback and Observers
Σ
Soc
y
dx = Ax + Bu dt y = Cx ˆ ) + lr r u = L( x m − x ˆ dx ˆ + Bu + K ( y − C x ˆ) = Ax dt
Soc
ˆ by x ˜ =x−x ˆ Replace x
Kalmans Decomposition
A linear system can be transformed to the form
A dx 21 = 0 dt
0 y = ( C1 0 A11 0 A22 0 0 C2 A13 A23 A33 A43 0) x 0
=
A11 0
A12 A22
→ y(t) = u(t)
y = (C
Notice that the state v which models the load disturbance is not controllable from u.
There are also design methods where it is deliberately attempted to cancel poles and zeros. It is important to understand what happens when this is done. The decomposition of a linear system gives good insight into what happens when working with transfer functions.
dx1 = − x1 + u dt dx2 = − x2 + u dt
Prototype of Non-observable System
Two identical systems whose outputs are added. Intuitively: no way to find out which system generated the output. A simple example
xc xc ¯
+
B1 0
u
B A24 2 x+ u 0 0
A44 0
B1
where the states xc are controllable and xc ¯ are non-controllable.
d dt xo ¯
u
s+a s+b
υ
s+b s+a
y
The system has the transfer function G (s) = 1. Natural questions: • Is the system equivalent to the system y = u? • What happens with the modes that are cancelled?
0
B → CT Wc → Wo
c
K. J. Åström August, 2001
2
System Structure
The coordinates can be chosen so that a linear system has the following structure
d dt
xc xc ¯
Theme: A closer look at the controllability and observability and the structure of linear systems.
Introduction
• The concepts of controllability and observability introduced as conditions to solve problems of state feedback and observers • More insight • Kalmans decomposition • System structures • Cancellation of poles and zeros
xc ¯o xc ¯o ¯
Kalmans Decomposition
Partitioning of state space • Sco controllable and observable • Sc o ¯ controllable not observable • Sc ¯o not controllable observable • Sc ¯o ¯ not controllable not observable