实习监督分类与非监督分类
实验四遥感图像的监督分类和非监督分类

实验四遥感图像的监督分类和⾮监督分类实验四遥感图像的⾮监督分类与监督分类⼀、实验⽬的1.⾮监督分类是对数据集中的像元依据统计数字,光谱类似度和光谱距离进⾏分类,在没有⽤户定义的条件下练习使⽤,在ENVI环境下的⾮监督分类技术有两种:迭代⾃组织数据分析技术(ISodata)和K均值算法(K-Means);2.分类过程中应注意:1)怎样确定⼀个最优的波段组合,从⽽达到最佳的分类精度,基于OIF和相关系数,协⽅差矩阵以及经验的使⽤来完成对最适合的组合的选取,分类效果的关键即在于此;2)K-Means的基本原理;3)Isodata的基本原理;4)分类结束后,被分类后的图像是⼀个新的图像,被分类类码秘填充,从⽽可以获得数据提取信息,统计不同类码数量,转化为实际⾯积,在得到后的图像上,可对不同⽬标的形态指标进⾏分析。
3.对训练区中的像元进⾏分类;4.⽤训练数据集估计查看监督分类后的统计参数;5.⽤不同⽅法进⾏监督分类,如最⼩距离法、马⽒距离法和最⼤似然法。
⼆、实验设备与材料1、软件ENVI 4.7软件2、所需材料TM数据三、实验步骤1.选择最优的波段组合ENVI主⼯具栏中File →Open image file →选择hbtmref.img打开→在Basic Tools中选择Statistics →Compute statistics选定原图,在Spectral subset中可选项全部选定→OK →OK →全选→保存→OK,则各类统计数字均可查;OIF计算,选择分类波段:1,2;2,3;1,3波段标准差分别为2.665727;3.473308;4.574609,和为10.713644。
Correlation Matrix 中1和2波段的相关系数0.964308,加上2和3波段的相关系数0.980166,再加上1和3波段的相关系数0.945880,最终等于2.890354。
⽤标准差相加的结果10.713644⽐上相关系数之和2.890354等于3.70668922。
实习8、监督分类与非监督分类
1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigated land 水库reservoir裸地barren land 工业区industrial area滩地shoaly land 林地forest草地grassland 河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择point、polyline、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选Options的统计训练区可分性Compute ROI Separability,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classification |Supervised| Maximum Likelihood,在Set Input File对话框中导入影像。
在打开的对话框中选Select All Items,其中Set Probability Threshold设为NO,Output Rule Image设为No,选择保存路径。
②根据分类的情况修改监督分类后的地物的颜色等信息。
具体操作:在监督分类影像中的Image上选择Overlay |Classification,点击“Supervised”,选择Option |Edit class colors/name 等来修改地物的名称和颜色5. 分类精度评价,从随机采集100~200个样本点,并确保每一类别不少于10个样本;进行分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进行解释。
监督分类和非监督分类
影像的分类可分为监督与非监督分类。
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。
有以下内容组成:∙ ∙ ●非监督分类∙ ∙ ●监督分类∙ ∙ ●分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
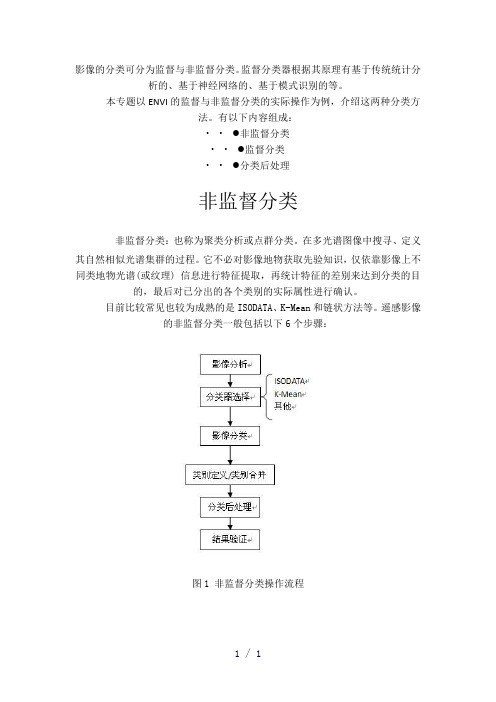
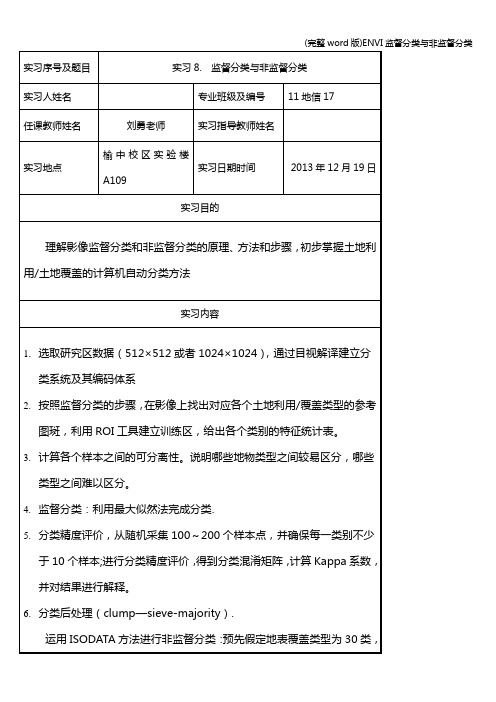
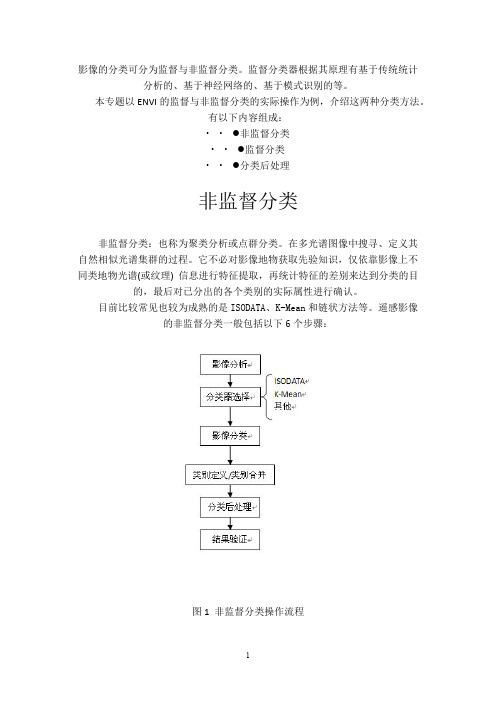
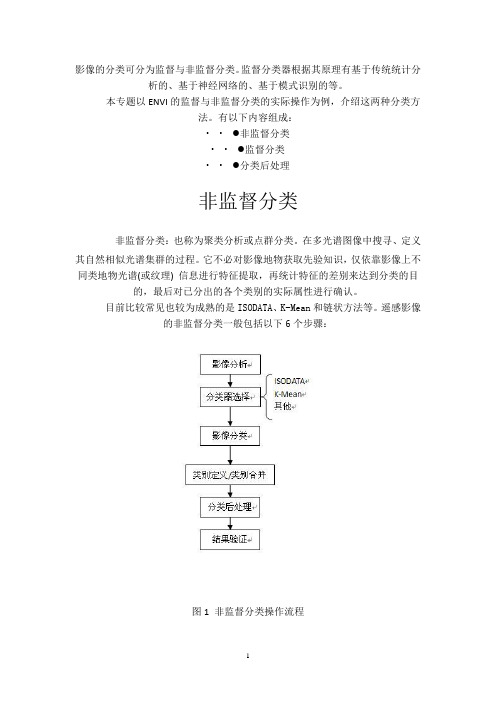
遥感影像的非监督分类一般包括以下6个步骤:图1 非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。
一般监督分类设置分类数目比最终分类数量要多2-3倍为宜,这样有助于提高分类精度。
本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
确定在非监督分类中的类别数为15。
2、分类器选择目前非监督分类器比较常用的是ISODATA、K-Mean和链状方法。
ENVI包括了ISODATA和K-Mean方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
3、影像分类打开ENVI,选择主菜单->Classification->Unsupervised->IsoData或者K-Means。
(完整word版)ENVI监督分类与非监督分类
对照原影像将30种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
结果与分析1、各个样本之间的可分离性.说明哪些地物类型之间较易区分,哪些类型之间难以区分。
Jeffries-Matusita(J—M距离):水稻田水浇地河流居民地草地林地工业区裸地水稻田1。
99982。
00002.00002。
00001.95252.00002。
0000水浇1。
99982.00002。
00001.94941。
98902。
00002.0000Band0。
85 0。
90 0。
88 0.93 1.00 0.97 5Band0.90 0.93 0。
92 0。
92 0。
97 1。
00 63、最大似然法进行监督分类结果:原影像最大似然法进行监督分类结果监督分类的最大似然法分类结果中,主要的地物都可以被区分出来,地物分工业区94.7494.7418/1918/19裸地100.00100。
0042/4242/425、Clump Classes和Sieve classes结果:Clump Classes3*3处理结果:Clump Classes5*5处理结果:在聚类统计的结果上很容易看出原本监督分类的生成结果中严重的椒盐现象消失了,地物类型都相对完整,但有些细节已经被消除看不清楚,3*3窗口与5*5窗口生成的结果区别就在于3*3窗口的细节较5*5窗口的更加清楚具体, 5*5窗口将周边的面积较小的地物完全合并在一起.Sieve classes结果(Number of Neighbors设为8):Sieve classes结果(Number of Neighbors设为4):对影像的过滤分析生成的结果显得椒盐现象更加严重,结果影像上出现了很多小黑点,Number of Neighbors的值设置的越小,小黑点越密集,但是经过过滤分析的影像”孤岛”现象都已经消失。
监督分类和非监督分类
影像的分类可分为监督与非监督分类。
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。
有以下内容组成:∙ ∙ ●非监督分类∙ ∙ ●监督分类∙ ∙ ●分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
遥感影像的非监督分类一般包括以下6个步骤:图1 非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。
一般监督分类设置分类数目比最终分类数量要多2-3倍为宜,这样有助于提高分类精度。
本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
确定在非监督分类中的类别数为15。
2、分类器选择目前非监督分类器比较常用的是ISODATA、K-Mean和链状方法。
ENVI包括了ISODATA和K-Mean方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
3、影像分类打开ENVI,选择主菜单->Classification->Unsupervised->IsoData或者K-Means。
监督分类和非监督分类
影像的分类可分为监督与非监督分类。
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。
有以下内容组成:∙ ∙ ●非监督分类∙ ∙ ●监督分类∙ ∙ ●分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
遥感影像的非监督分类一般包括以下6个步骤:图1 非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。
一般监督分类设置分类数目比最终分类数量要多2-3倍为宜,这样有助于提高分类精度。
本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
确定在非监督分类中的类别数为15。
2、分类器选择目前非监督分类器比较常用的是ISODATA、K-Mean和链状方法。
ENVI包括了ISODATA和K-Mean方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
3、影像分类打开ENVI,选择主菜单->Classification->Unsupervised->IsoData或者K-Means。
实习8、监督分类与非监督分类
操作方法及过程1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigat ed land 水库reservoi r裸地barrenl and 工业区industri al area滩地shoalyland 林地forest草地grassla nd河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择poin t、polylin e、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选O p tions的统计训练区可分性Com pute ROI Separab ility,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classifi catio n|Supervi sed| Maximum Likelih ood,在Set Input File对话框中导入影像。
在打开的对话框中选Sele ct All Items,其中Set Probabi lity Threshol d设为NO,Output R ule Image设为N o,选择保存路径。
监督分类与非监督分类遥感实习
B、在Overlay下选择Classification,选择之前的非监督分类影像,对照原影像将10种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
3.注意:此次实习内容的操作环境为ENVI Classic经典版,上机课上将演示新版本操作。同时此次实习内容为大作业中视频教程中省略的部分。
基本原理
1、监督分类:监督分类是在分类前人们已对遥感影像样本区中的类别属性有了先验知识,进而可利用这些样本类别的特征作为依据建立和训练分类器(亦即建立判别函数),进而完成整幅影像的类型划分,将每个像元归并到相对应的一个类别中去。也就是根据地表覆盖分类体系、方案进行遥感影像的对比分析,据此建立影像分类判别规则,最后完成整景影像的分类。监督分类的具体步骤:
3、最大似然分类法是基于概率论中每个像元存在属于所有类别的概率,假设各个类别训练数据都呈现关于类均值矢量和方差参数的n维高斯正态分布,根据像元矢量和上述假设可利用n维正态分布函数计算像元矢量属于各个类别的概率,比较各个类别的概率值,并将像元划归到概率最大的那个类别当中去。
4、分类混淆矩阵(误差矩阵)是指采用随机采样的方法获取一批地面参考验证点的信息作为真值,与遥感分类图进行逐像元比较。然后将结果归纳到混淆矩阵,进而完成混淆矩阵分析。其中结果分为类别精度与总精度,其中类别精度被正确分类的类别像元数占该类别训练样本像元数的百分比,包括生产者精度(制图精度)和用户精度,总精度是指被正确分类的总像元数占评价样本像元总数的百分比。
监督分类和非监督分类
各自优缺点:监督分类的特点:主要优点:可充分利用分类地区的先验知识,预先确定分类的类别;可控制训练样本的选择,并可通过反复检验训练样本,以提高分类精度(避免分类中的严重错误);可避免非监督分类中对光谱集群组的重新归类。
主要缺点:人为主观因素较强;训练样本的选取和评估需花费较多的人力、时间;只能识别训练样本中所定义的类别,对于因训练者不知或因数量太少未被定义的类别,监督分类不能识别,从而影响分结果(对土地覆盖类型复杂的地区需特别注意)。
非监督分类特点:主要优点:无需对分类区域有广泛地了解,仅需一定的知识来解释分类出的集群组;人为误差的机会减少,需输入的初始参数较少(往往仅需给出所要分出的集群数量、计算迭代次数、分类误差的阈值等);可以形成范围很小但具有独特光谱特征的集群,所分的类别比监督分类的类别更均质;独特的、覆盖量小的类别均能够被识别。
主要缺点:对其结果需进行大量分析及后处理,才能得到可靠分类结果;分类出的集群与地类间,或对应、或不对应,加上普遍存在的“同物异谱”及“异物同谱”现象,使集群组与类别的匹配难度大;因各类别光谱特征随时间、地形等变化,则不同图像间的光谱集群组无法保持其连续性,难以对比。
一、什么是监督分类与非监督分类?非监督分类:没有训练样本,通过计算哪些相似,划分出不同类别。
先定义光谱可分性,再定义信息类。
是指人们事先对分类过程不施加任何的先验知识,而仅凭数据(遥感影像地物的光谱特征的分布规律),即自然聚类的特性,进行“盲目”的分类;其分类的结果只是对不同类别达到了区分,但并不能确定类别的属性。
监督分类:根据已知训练区提供的样本,通过计算选择特征参数,建立判别函数以对各待分类影像进行的图像分类。
先定义信息类,再定义光谱可分性。
二、它们包括什么?非监督分类包括:1.波谱图形识别分类2.聚类分析监督分类包括:1.最小距离法2.线形判别分析3.最大似然比分类4.最近邻域分类法5.特征曲线窗口法三、二者的优缺点:非监督分类优点:1.人为干预较少,自动化程度较高。
非监督分类实习报告
一、实习背景随着人工智能技术的飞速发展,机器学习在各个领域得到了广泛的应用。
非监督学习作为机器学习的一个重要分支,旨在通过算法自动将数据集划分为若干个类别,而不需要预先定义类别。
为了深入了解非监督学习在分类任务中的应用,我参加了为期一个月的非监督分类实习项目。
二、实习目标1. 掌握非监督学习的基本概念和原理;2. 熟悉常用的非监督学习算法,如K-means、层次聚类、DBSCAN等;3. 学会使用Python等编程语言进行非监督学习实践;4. 分析非监督学习在分类任务中的应用效果,并针对实际问题提出改进措施。
三、实习过程1. 非监督学习基础知识学习在实习初期,我学习了非监督学习的基本概念和原理,包括聚类、降维、异常检测等。
通过阅读相关文献和在线课程,我对非监督学习有了初步的了解。
2. 非监督学习算法实践在掌握了非监督学习基础知识后,我开始进行算法实践。
以下是我对几种常用非监督学习算法的实践过程:(1)K-means聚类K-means聚类是一种基于距离的聚类算法,它将数据集划分为K个簇,使得每个簇内的数据点距离聚类中心最近。
我使用Python的sklearn库实现了K-means聚类,并针对一组模拟数据进行了实验。
(2)层次聚类层次聚类是一种基于层次结构的聚类算法,它将数据集逐步合并为一个大簇,并记录合并过程中的信息。
我使用Python的scipy库实现了层次聚类,并针对一组模拟数据进行了实验。
(3)DBSCAN聚类DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类算法,它将数据集划分为若干个簇,并识别出噪声点。
我使用Python的sklearn库实现了DBSCAN聚类,并针对一组模拟数据进行了实验。
3. 非监督学习在分类任务中的应用在实习过程中,我尝试将非监督学习应用于分类任务。
以下是我对两种应用场景的实践:(1)数据降维降维是将高维数据转换为低维数据的过程,有助于提高后续分类算法的效率和准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigated land 水库reservoir裸地barren land 工业区industrial area滩地shoaly land 林地forest草地grassland 河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择point、polyline、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选Options的统计训练区可分性Compute ROI Separability,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classification |Supervised| Maximum Likelihood,在Set Input File对话框中导入影像。
在打开的对话框中选Select All Items,其中Set Probability Threshold设为NO,Output Rule Image设为No,选择保存路径。
②根据分类的情况修改监督分类后的地物的颜色等信息。
具体操作:在监督分类影像中的Image上选择Overlay |Classification,点击“Supervised”,选择Option |Edit class colors/name 等来修改地物的名称和颜色5. 分类精度评价,从随机采集100~200个样本点,并确保每一类别不少于10个样本;进行分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进行解释。
选择Classification中的分类后处理post classification,选择混淆矩阵Confusion Matrix的Using Ground Truth ROIs,选择之前保存的最大似然法的影像,将所有的编好号的地物一一对应加载进来,点击确定,即可生成混淆矩阵6. 分类后处理(clump—sieve—majority)。
类别集群:选择Classification |Post Classification,Clump Classes,在Select Input File对话框中选择Supervised。
最后设定数据输出路径。
类别筛选:选择Classification |Post Classification |Sieve classes,在Select Input File中选择Supervised,Group Min Threshold设为2, Number of Neighbors为8,进行保存。
主/次要分析:Classification |Post Classification |Majority/Minority Analysis,在Select Input File对话框中选择Supervised |Select All Items,Analysis Method设定为Majority,最后选择保存路径。
Clump对话框Sieve对话框Majority对话框7. 非监督分类:预先假定地表覆盖类型为30类,迭代次数选为15,由系统完成非监督分类;然后进行类别定义与合并子类,最后进行结果评价。
1、选择Classification的非监督分类Unsupervised,选择者IsoData,选择512*512子区,设置参数。
2、在Overlay下选择Classification,选择之前的非监督分类影像,对照原影像将30种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
结果与分析1、按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
特征统计表Stats for ROI: greval desert [Yellow1] 1325 pointsBasic Stats Min Max Mean Stdev EigenvalueBand 163.00 89.00 76.79 4.63 535.02Band 260.00 93.00 76.14 6.78 10.10Band 376.00 117.00 95.99 8.34 4.03Band 464.00 98.00 82.60 7.16 1.35Band 569.00 124.00 97.56 13.95 0.98Band 660.00 113.00 86.65 13.01 0.69Stats for ROI: road [Cyan2] 181 pointsBasic Stats Min Max Mean Stdev EigenvalueBand 151.00 78.00 63.13 6.05 489.67Band 243.00 79.00 57.26 6.92 161.11Number of classes为分类的数目;Maximum iterations为迭代次数原始影像分类后影像经过最大似然法的监督分类后,主要地物可以被分类出来,可以看出大概的分类结果和各种主要地物的分布情况,但由于算法本身存在问题和在选取训练区时的人为因素造成很严重椒盐现象并且由于人为因素使得居民点划分有很大误差。
4、分类精度评价Overall Accuracy = (7639/9947) 76.7970%Kappa Coefficient = 0.7046Ground Truth (Pixels)Class town gravel desert road paddy land irrigated landUnclassified 0 0 0 0 0 town 543 22 9 2 0 greval desert 7 1182 3 0 0 road 33 0 124 75 3 paddy land 0 0 7 1886 5 irrigated lan 0 0 5 5 446 reservoir 0 0 0 16 0 barren land 76 118 5 1 0 industrail ar 45 3 19 14 0 shoaly land 0 0 0 17 0 forest 0 0 9 8 2 grssland 0 0 0 0 0 stream 0 0 0 0 0 Total 704 1325 181 2024 456Ground Truth (Pixels)Class reservoir barren land industrial area shoaly land forestUnclassified 0 0 0 0 0 town 0 450 13 0 0 greval desert 0 1022 3 0 0 road 0 46 25 1 2 paddy land 0 0 1 0 0 irrigated land 0 0 4 0 1分类后影像clump后影像【结果与分析】:聚类处理将邻近的类似分类单元进行聚类合并,可以看到影像中比较小的地物被合并,但是也将一些比较孤立的地物被错分。
分类后影像sieve后影像【结果与分析】:过滤处理解决分类影像中出现的孤岛问题。
过滤处理使用斑点分组方法来消除这些被隔离的分类像元。
但是使得影像更为破碎,出现了更多的黑点(在影像北方的裸地与砾石更加明显),椒盐现象更明显。
分类后影像Majority后影像【结果与分析】:主要分析后的影像效果较好,椒盐现象得到一定程度的避免,并且将一些影像里小的地块进行合并,使影像更加光滑。
7. 运用ISODA TA方法进行非监督分类:监督分类影像非监督分类影像非监督分类处理影像【结果与分析】:非监督分类影像中共30种根据摇感光谱划分的地物,明显可以感觉到地物分离太过破碎,并且由于“同物异谱”、“异物同谱”等原因使得同一地物被划分成不同类别或者不同地物被划分为同一地物;非监督分类处理影像将30类进行处理与合并,将名称与颜色进行重处理,然后得到影像,但是由于一些地物(水库、草地)等分布较少、破碎,所以被漏分,并且由于非监督分类后,30种地物有的颜色一致,在后期处理里存在很大的问题,使得同一个地物不知道是何种。
存在问题与解决办法1、在监督分类进行训练样本数据采集时,由于对影像的地理信息不是很清楚,导致地物选取有很大的误差,城镇居民区、工业区选区不能有效地区分,裸地与砾石也比较难以辨别。
解决办法:加载结果影像,观察错分的地物,然后在人为的将错选的地物归类到合适的ROI;2、在非监督分类中由于“同物异谱”、“异物同谱”等原因使得同一地物被划分成不同类别或者不同地物被划分为同一地物,并且由于30种颜色有的重复,不能确定对应关系,操作很麻烦;解决办法:每一种颜色变动后,在重新加载,观察前后两张影像变动地方,然后在进行。