附合导线平差算例
附合导线平差计算过程说明
附合导线平差计算过程说明1)道路观测左角∑β测左=308°2.'38"+70°35'41"+156°56'39"+185°39'2"+205°21'59"+174°36'43"+197°31'46"+157°36'36"+135°14'40"+167°38'50"=1759°14'34"ƒβ测=a始边- a终边=-15"。
ƒβ容=± 40√n =±126"。
ƒβ测<ƒβ容,测角精度符合要求。
2)改正角:β=β测- ƒβ测/N。
3)坐标方位角的推算:根据起始边的坐标方位角及改正角,依据公式a下一边’= a始边+180°+转角(观测转左角)依次计算各边的坐标方位角。
4)坐标增量的计算及闭合差的调整坐标增量计算根据已经推算出的导线各边的坐标方位角和相应边的边长,按下面公式计算各边的坐标增量。
△ X AB=D AB*COS a AB,△ Y AB=D AB*SIN a AB,按附合导线要求,各边的坐标增量代数和的理论植,等于终起两点的已知坐标之差,所以,纵、横坐标增量闭合差按公式计算,Fx=∑△x测-(X终-X起)FY=∑△Y测-(Y终-Y起)导线全长闭合差f=√(ƒx2+ƒy2)=0.102m,k=f/∑D=1/38370<1/2000.满足精度要求。
5)根据后一点的坐标及改正后的坐标增量,按公式推算前一点坐标。
X前=X后+△x改Y前=Y后+△Y改最后,推算出终止边的坐标,与原有设计值相等,以作检核。
1-11单导线条件平差计算--附合导线坐标条件方程
平差值条件方程: ALˆ A0 0
改正数条件方程: AV W 0
STEP1
表达成角度和边
长平差值的形式
STEP2
表达成角度和边
长改正数的形式
附合导线坐标条件方程
1、纵坐标附合条件方程式
xˆN 1 xC 0
STEP1
xˆN 1 xB [xˆi ]1N
xˆi Sˆi cosTˆi
3
N
SN-1
SN
D
TCD
βN+1
C (N+1)
纵坐标符合条件方程式就是:xˆN 1 xC 0 横坐标符合条件方程式就是:yˆ N 1 yC 0
B点坐标的已知值 (xB , yB ) 或 (x1, y1)
C点坐标已知值
(xC , yC ) 或 (xN 1, yN 1)
C点坐标观测值
A
D
β2
β4
βN
2
4
β1 S1 S2 β3 S3
N
SN-1
SN βN+1
3
B(1)
附合导线示例图
C(N+1)
附合导线坐标条件方程
补充:具体计算时的单位选取
如果x、y 以米为单位,w、vS 以厘米为单位、vβ 以秒为单位。
[cos Ti
vSi
]1N
1
[( yN 1
yi )vi
]1N
STEP2
表达成角度和边 长改正数的形式
xˆN 1 xB [xˆi ]1N
xˆi Sˆi cosTˆi
非线性从这个式子着手!!
Tˆi TAB ˆ j
i
180
1-10单导线条件平差计算--附合导线方位角条件方程-修改

坐标方位角条件就是: TˆN 1 TCD 0
TˆN 1 TCD 0
代入
TˆN 1
TAB
[ˆi
]N 1
1
(N
1) 180
? 思考
TCD TN 1 TˆN1
TAB [ˆi ]1N 1 (N 1) 180 TCD 0 代入 ˆi i vi (i 1,2,, N 1)
[vi ]1N 1 wT 0
wT (TAB [i ]1N 1 (N 1) 180 TCD ) (TN 1 TCD )
A
D
β2
β4
βN
坐标方位角改正数条件方程: [vi ]1N 1 wT 0
β1 B(1)
2
4
S1 S2 β3 S3
3
N
SN-1
( xˆ N 1,yˆ N 1 )
条件方程类型:
1坐标方位角附合条件方程式 2纵坐标附合条件方程式 3横坐标附合条件方程式
A
D
β2
β4
βN
β1 B(1)
2
4
S1 S2 β3 S3
3
N
SN-1
SN βN+1
C(N+1)
附合导线示例图
理论
感谢聆听,批评指导
公式
思考
平差
算例
Xi’an University of Science & Technology
举一 反三
治学 严谨
Error Theory and Surveying Adjustment
逻辑
性强
主讲人:史经俭 张静 席晶
本讲内容
附合导线方位角条件方程
3-3--导线网条件平差计算.doc
3-3--导线网条件平差计算§3-3 导线网条件平差计算2学时导线网,包括单一附合导线、单一闭合导线和结点导线网,是目前较为常用的控制测量布设方式之一,其观测值有长度观测值和角度观测值。
在本节中我们主要讨论单一导线的平差计算,先讨论单一附合导线问题。
一.单一附合导线条件平差如图3-6所示,在这个导线中有四个已知点、n -1个未知点、n+1个水平角观测值和n条边长观测值,总观测值数为2n+1。
从图中可以分析,要确定一个未知点的坐标,必须测一条导线边和一个水平角,即需要两个观测值;要确定全部n -1个未知点,则需观测n -1个导线边和n -1个水平角,即必要观测值数t = 2n -2;则多余观测个数r = (2n +1) –t = 3。
也就是说,在单一附合导线中,只有三个条件方程。
下面讨论其条件方程式及改正数条件方程式的写法。
(3-3-4) 其中)180)1(][(110CD n i T T n T w -⋅+±+-=+ β2.纵坐标附合条件式 终点C 坐标平差值表示为n i B n x x x11]ˆ[ˆ∆+=+(3-3-5) 而第i 边的坐标增量为ii i T S x ˆcos ˆˆ=∆ (3-3-6)式中iS i i v S S +=ˆii i j i i j i j i T v i T v i v T i T T j j j +=⋅±++=⋅±++=⋅±+=10111010][180][][180][180]ˆ[ˆββββββ其中T i 是第i 边的近似坐标方位角180][01⋅±+=i T T ij i β(3-3-7)则(3-3-6)式可表示为)]cos([)(ˆ1i iS i i T v v S x j i ++=∆β上式按泰勒级数展开,取至一次项,得ii S i i i j i v y v T x x1][cos ˆβρ''∆-⋅+∆=∆其中ii iT S x cos =∆,为由观测值计算出的近似坐标增量。
附合导线严密平差算法总结
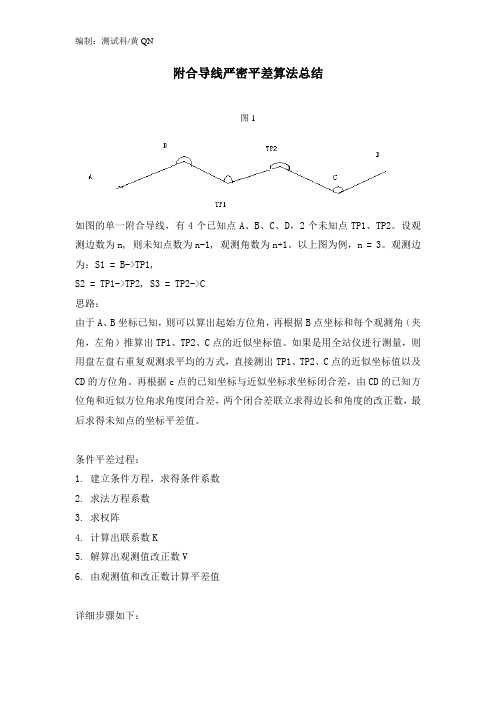
附合导线严密平差算法总结图1如图的单一附合导线,有4个已知点A、B、C、D,2个未知点TP1、TP2。
设观测边数为n, 则未知点数为n-1, 观测角数为n+1。
以上图为例,n = 3。
观测边为:S1 = B->TP1,S2 = TP1->TP2, S3 = TP2->C思路:由于A、B坐标已知,则可以算出起始方位角,再根据B点坐标和每个观测角(夹角,左角)推算出TP1、TP2、C点的近似坐标值。
如果是用全站仪进行测量,则用盘左盘右重复观测求平均的方式,直接测出TP1、TP2、C点的近似坐标值以及CD的方位角。
再根据c点的已知坐标与近似坐标求坐标闭合差,由CD的已知方位角和近似方位角求角度闭合差,两个闭合差联立求得边长和角度的改正数,最后求得未知点的坐标平差值。
条件平差过程:1.建立条件方程,求得条件系数2.求法方程系数3.求权阵4.计算出联系数K5.解算出观测值改正数V6.由观测值和改正数计算平差值详细步骤如下:1、建立条件方程在单一附合导线中,只需要三个条件方程即:方位角附合条件、纵坐标附合条件和横坐标附合条件方程。
(省略了条件方程的推导过程,详细过程请查看参考资料:《测量平差.pps》)(1)方位角附合条件[Vβi]n+11+ Wβ= 0式中,Wβ= - (T0– T CD+ [βi]n+11 - (n+1)*180°)(角度闭合差)βi ——角度观测值(夹角,左角)Vβi ——各观测角的改正数。
如果是用全站仪观测,则Wβ= - (T CD– T CD)式中,T CD ——CD的方位角观测值,T CD ——CD的已知方位角(2)纵坐标X附合条件方程[Cos TI * VSi]1n - (1/ ρ”)* [(Yn+1- Yi) * Vβi]1n - W x = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Yn+1—— C点即终止点的横坐标Y的观测值(近似值)Yi——待定点的横坐标Y的观测值Wx = - (Xn+1- XC)XC—— C点即终止点的纵坐标X的已知值ρ” = 2062.65(3)横坐标Y附合条件方程[Sin TI * VSi]1n + (1/ ρ”)* [(Xn+1- Xi) * Vβi]1n– W Y = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Xn+1—— C点即终止点的纵坐标X的观测值(近似值)Xi——待定点的纵坐标X的观测值WX = - (Yn+1- YC)YC—— C点即终止点的横坐标Y的已知值ρ” = 2062.652、求条件方程的系数矩阵联立3个方程得改正数条件方程组:[Vβi]n+11+ Wβ= 0[Cos TI * VSi]1n - 1/ ρ”* [(Yn+1- Yi) * Vβi]1n - W x = 0;[Sin TI * VSi]1n + 1/ ρ”* [(Xn+1- Xi) * Vβi]1n– W Y = 0;其系数矩阵arrA为:(即改正数V的系数,此处以图1为例, n = 3)3、联系数法方程(简称法方程)AP-1A T K – W = 0A——系数矩阵arrAK ——乘系数P ——权阵W ——闭合差矩阵由上得法方程的系数阵N:N = AP-1A T(权的推导见参考资料:《全站仪观测导线测量平差方法的研究.pdf》)角度权:P βi = 1;(因为角度的标称精度是固定的,各观测角权值相等) 边长权:P Si = (μ0 *μ0 ) / (M D * M D )(误差比例系数固定,边长的误差与距离有关,因此不一致)式中,μ0 ——先验测角中误差,以秒为单位 M D —— 距离观测中误差若 导线边长为S i (米),e1 为仪器的边长标称固定误差(mm ),e2为仪器的边长比例误差系数(无单位),则M D = ± (e1 + e2 * S i * 0.001)mm 需转化为厘米:M D = M D ** 0.1 (cm )由于此处是要P 的逆矩阵P -1,因此要求P 的各元素的倒数(P 是对角矩阵,对角矩阵的逆矩阵就是原矩阵元素的倒数) Psi = 1/ Psi ;由上可得,P -1 矩阵如下:4、求改正数由于N 已经在前面的步骤中求出,求N 的逆矩阵。
单一附合导线平差计算
单一附合导线平差计算[PC1500]单一附合导线平差计算[PC1500]由本人在网络上收集整理2 W=1+G+5E-7:D$=STR$ (INT W-1):G$=STR$ (W-INT W)3 IF LEN D$<3LET D$=" "+D$:GOTO 34 IF LEN G$<8LET G$=G$+"0":GOTO 45 G$=D$+" "+MID$ (G$,3,2)+" "+MID$ (G$,5,2)+"."+MID$ (G$,7,2):RETURN6 Z=Z+B(I)-180:Z=Z-(SGN Z+SGN (Z-360))*180:RETURN7 X(I)=X(I-1)+S(I)*C:Y(I)=Y(I-1)+S(I)*S:RETURN8 "A"CLEAR :INPUT "M=";U,"MB=";M,"Ms:a(mm)=";A,"b(ppm)=";B,"SIDES=";N10 DIM B(N),S(N),Q(N),X(N),Y(N):S$="######.###":W$="####.##":WAIT 015 INPUT "Xa=";X(0),"Ya=";Y(0),"a(I)=";H,"Xb=";X,"Yb=";Y,"a(II)=";L,"TOTAL Mp=";F20 T=N+1:P=180/PI :K=5E-3:IF F=0THEN 4525 DIM P(F),F(F),G(F),H(F),I(F),J(F),K(F),C(F),D(F),E(F)30 FOR I=1TO F:IF F=N-1LET P(I)=I:GOTO 4035 PRINT I;":P";:INPUT P(I):CLS40 NEXT I45 FOR I=0TO N:IF IPRINT "S";I;"=";:INPUT S(I):CLS50 PRINT "B";I;"=";:INPUT B(I):CLS :NEXT I:END55 "B"PRINT "M=";U;" ";:INPUT U60 CLS :PRINT "MB=";M;" ";:INPUT M65 CLS :PRINT "a=";A;"mm";" ";:INPUT A70 CLS :PRINT "b=";B;"ppm";" ";:INPUT B75 CLS :PRINT "Xa=";X(0);" ";:INPUT X(0)80 CLS :PRINT "Ya=";Y(0);" ";:INPUT Y(0)85 CLS :PRINT "a(I)=";H;" ";:INPUT H90 CLS :PRINT "Xb=";X;" ";:INPUT X95 CLS :PRINT "Yb=";Y;" ";:INPUT Y100 CLS :PRINT "a(II)=";L;" ";:INPUT L105 CLS :FOR I=0TO N:IF IPRINT "S";I;"=";S(I);" ";:INPUT S(I)110 CLS :PRINT "B";I;"=";B(I);" ";:INPUT B(I)115 CLS :NEXT I:END120 "C"CSIZE 2:COLOR 2:LPRINT "M=";U;",MB=";M:LPRINT "Ms=";A;"mm+";B;"ppm"125 GOSUB 1:LPRINT "P B(Observed)":GOSUB 1:LF 2:H=DEG H:L=DEG L:Z=H130 FOR I=0TO N:G=B(I):GOSUB 2:IF I=0LPRINT "A";:GOTO 145135 IF I=NLPRINT "B";:GOTO 145140 LPRINT I;145 LPRINT TAB 4;G$:B(I)=DEG G:LF 2:GOSUB 6:NEXT I:LF -1:GOSUB 1:W=Z-L:W=W-180*SGN W*(SGN (ABS W-1)+1) 150 V=W/T:Z=H:E=0:G=0:L=0155 GOSUB 1:LPRINT TAB 7;"S(Observed)":GOSUB 1:LF 3160 FOR I=0TO N:IF I=0THEN 185165 Q(I)=((A+S(I)*B/1E3)/M)^2*12.96:LPRINT S(I):LF 2:C=COS Z:S=SIN Z170 D=D+Q(I)*C*C:E=E+Q(I)*S*S:G=G+Q(I)*C*S:GOSUB 7:L=L+S(I):IF F=0THEN 185175 IF O<FLET O=O+1180 IF I=P(O)LET F(O)=D:G(O)=E:J(O)=D:K(O)=G:C(O)=G:D(O)=E:E(O)=G185 B(I)=B(I)-V:GOSUB 6:Q=Q+X(I)/T:R=R+Y(I)/T:NEXT I:LPRINT :GOSUB 1:V=0190 X=X(N)-X:Y=Y(N)-Y:COLOR 2:LPRINT "WB=";USING W$;3600*W+K*SGN W195 LPRINT TAB 3;"WB(Ltd)=";2*SQR T*U+K:S=SQR (X*X+Y*Y):LPRINT TAB 3;USING S$;"L=";L200 LPRINT "Wx=";USING W$;X*100+K*SGN X:LPRINT "Wy=";Y*100+K*SGN Y:LPRINT "Ws=";S*100+K;"cm"205 USING :LPRINT TAB 3;"Ws/L=1/";INT (L/S/100+.5)*100:LPRINT :S=P*P210 FOR I=0TO N:X(I)=X(I)-Q:Y(I)=Y(I)-R:D=D+Y(I)^2/S:E=E+X(I)^2/S:G=G-X(I)*Y(I)/S215 NEXT I:Z=D*E-G*G:J=(G*Y-E*X)/Z:U=(G*X-D*Y)/Z220 M=SQR (W*W/T-J*X-U*Y)/SQR 3:LPRINT "Mo=";USING "###.##";M*3600+K:IF F=0THEN 275225 FOR A=1TO F:O=P(A):FOR I=0TO O-1:B=Y(O)-Y(I):C=X(O)-X(I):E(A)=E(A)-B*C/S230 F(A)=F(A)+B*B/S:G(A)=G(A)+C*C/S:H(A)=H(A)-B/P:I(A)=I(A)+C/P235 J(A)=J(A)-B*Y(I)/S:K(A)=K(A)+C*Y(I)/S:C(A)=C(A)+B*X(I)/S:D(A)=D(A)-C*X(I)/S240 NEXT I:NEXT A245 FOR I=1TO F:A=C(I)*D-J(I)*G:B=D(I)*D-K(I)*G250 L=F(I)-H(I)^2/T-J(I)^2/D-A*A/D/Z:V=G(I)-I(I)^2/T-K(I)^2/D-B*B/D/Z255 S=E(I)-H(I)*I(I)/T-J(I)*K(I)/D-A*B/D/Z260 C=ATN (2*S/(L-V))/2:C=C+45*(2-SGN C-SGN S):USING :LPRINT "P";P(I);":":CSIZE 1:LF -1:CSIZE 2:GRAPH :ROTATE 1 265 LPRINT "O":ROTATE 0:TEXT :LPRINT "le=";USING W$;C+K;"(DEG)"270 LPRINT "E=";USING "###.#";M*SQR (L+S*TAN C)*100+.05;",F=";M*SQR ABS (V-S*TAN C)*100+.05;"cm":NEXT I275 Z=H:GOSUB 1:LPRINT "B(Adjusted) / a":GOSUB 1:K=5E-4280 FOR I=0TO T:G=DMS Z:GOSUB 2:COLOR (I=0OR I=T)*3:LPRINT TAB 6;G$:LPRINT :IF I=0THEN 300290 IF I=TLF -1:GOTO 310295 S(I)=S(I)+(C*J+S*U)*Q(I)300 B(I)=B(I)+(J*Y(I)-U*X(I))/P:G=DMS B(I):GOSUB 2:IF IGOSUB 7305 COLOR 0:LPRINT G$:GOSUB 6:C=COS Z:S=SIN Z:IF I=0LET X(0)=X(0)+Q:Y(0)=Y(0)+R310 NEXT I:GOSUB 1:GOSUB 1:LPRINT TAB 7;"S(Adjusted)":GOSUB 1:LPRINT315 FOR I=1TO N:LF 2:LPRINT USING S$;S(I)+K:NEXT I:LF 3:GOSUB 1:GOSUB 1:LPRINT TAB 9;"X / Y":GOSUB 1320 USING "########.###":FOR I=0TO N:X=X(I):LPRINT :IF I=0OR I=NCOLOR 3:GOTO 330325 X=X+K*SGN X*(X<1E6)330 LPRINT X:LPRINT Y(I)+K*SGN Y(I):COLOR 0:NEXT I:LPRINT :GOSUB 1:USING :END10001 GRAPH :LINE -(216,0),0,0:TEXT :LPRINT :RETURNINT X:LPRINT Y(I)+K*SGN Y(I):COLOR 0:NEXT I:LPRINT :GOSUB 1:USING :END10001 GRAPH :L。
控制测量学附合导线按条件平差算例
附合导线按条件平差算例9.4.1附合导线的条件平差方程式如图9-6所示,符合在已知),(A A y x A ,),(C C y x C 之间的单一符合导线有n 条AB α与CDα是已知方位角。
设观测角为β、β、… …、β,测角中误差为 ,观测边长为s 、s 、… …、s ,故t1为v 1=ii BACD 011=+∑+=a i n i v ω (9-2)式中a ω—方位角条件的不符值,按180)1(ˆ11+-∑+-=+=n in i CD BAaβααω (9-3)若导线的A 点与C 点重合,则形成一闭合导线,由此坐标方位角条件就成了多边形的图形闭合条件。
2、纵、横坐标条件 设以1ˆx ∆、2ˆx ∆、…、n x ˆ∆表示图中各导线边的纵坐标增量之平差值;1ˆy∆、2y ∆、…、n yˆ∆表示图中各导线边的横坐标增量之平差值;由图可写出以坐标增量平差值表示的纵、横坐标条件。
⎪⎪⎭⎪⎪⎬⎫∑+∆∑+=∆∑+=∑+∆∑+=∆∑+=∆∆yi n i n A i n A C xi n i n A i nA C v y y yy y v x x xx x 111111ˆˆ (9-4)σ令⎪⎪⎭⎪⎪⎬⎫--∆∑=--∆∑=)()(11A Ci nyA C i nx y y y x x x ωω (9-5)则⎪⎪⎭⎪⎪⎬⎫=+∑=+∑∆∆0011yyi nx xi nv v ωω (9-6) 以微分量代替改正数,则有)()()(211n xi nx d x d x d v ∆++∆+∆=∑∆{}ρα1231211)()()(cos v y y y y y y v v n Csi i nxin-'++-+--∑=∑∆将上式代入式9-6得纵坐标条件式,且同理已可得横坐标的条件式即⎪⎪⎭⎪⎪⎬⎫=+-'∑+∑=+-'∑-∑====0)(1sin 0)(1cos 1111y i i Cni sii n i x i i Cni si i n i v x x v v y y v ωραωρα (9-7)上式就是单一符合导线的纵、横坐标条件方程x ω、y ω为条件式的不符值,按⎪⎪⎭⎪⎪⎬⎫-'=-∆∑+=-'=-∆∑+=C CCi nA yC CC i nA x y y y y y x x x x x 11ωω (9-8)式中i x 、i y 是由观测值计算的各导线点的近似坐标。
附和导线近似平差计算程序
附和导线近似平差计算程序P:A:B:I:J:K:L:Defm12 P=P+2:N=0:M=AW=60√P÷3600LbI0N=N+1{C}Z[2N-1]=C:M=M+CM>180=>M=M-180:≠=>M=M+180⊿N<P=>Goto0⊿F=M-B:F>360=>F=F-360⊿F▲AbsF<W=>F=-F÷P:≠=>Goto E⊿N=0:M=ALbI1N=N+1:M=M+Z[2N-1]+FM>180=>M=M-180▲≠=>M=M+180▲⊿Z[2N-1]=MN<P=>Goto1⊿N=0:M=0:G=0:H=0:P=P-1LbI2N=N+1{D}:Z[2N]=D:M=M+DX=DcosZ[2N-1]:Y=DsinZ[2N-1]G=G+X:H=H+YZ[2N-1]=X:Z[2N]=YN<P=>Goto2⊿G=G+I-K▲H=H+J-L▲T=√(G×G+H×H)▲Q=M÷T▲Q>2000=>G=-G÷M:H=-H÷M:≠=>Goto E⊿N=0:X=I:Y=JLbI3N=N+1▲D=√(Z[2N-1]×[2N-1]+Z[2N]×[2N])V=Z[2N-1]+DG▲U=Z[2N]+DH▲X=X+V▲Y=Y+U▲Z[2N-1]=X:Z[2N]=YN<P=>Goto3⊿LbI E说明:1程序中Defm12是按4个未知点设置的,计算时要进行修改。
如未知点数为n,修改数为2(n+2)。
1:P输入未知点数2:A输入起点方位角3:输入终点方位角4:I,J输入起点坐标5:K,L输入终点坐标6:C从导线起点依次观测角7:F角度闭合差8:M导线第一边依次方位角平差值9:D导线第一边依次输边长10:G,H为(⊿X,⊿Y)导线闭合差11:T为导线绝对误差12:Q为导线相对闭合差分母,分子为1 13:N导线未知点数14:V,U为导线第一边坐标增量平差值15:X,Y为导线未知点坐标平差值。
附合导线平差计算过程说明
附合导线平差计算过程说明1)道路观测左角∑β测左=308°2.'38"+70°35'41"+156°56'39"+185°39'2"+205°21'59"+174°36'43"+197°31'46"+157°36'36"+135°14'40"+167°38'50"=1759°14'34"ƒβ测=a始边- a终边=-15"。
ƒβ容=± 40√n =±126"。
ƒβ测<ƒβ容,测角精度符合要求。
2)改正角:β=β测- ƒβ测/N。
3)坐标方位角的推算:根据起始边的坐标方位角及改正角,依据公式a下一边’= a始边+180°+转角(观测转左角)依次计算各边的坐标方位角。
4)坐标增量的计算及闭合差的调整坐标增量计算根据已经推算出的导线各边的坐标方位角和相应边的边长,按下面公式计算各边的坐标增量。
△ X AB=D AB*COS a AB,△ Y AB=D AB*SIN a AB,按附合导线要求,各边的坐标增量代数和的理论植,等于终起两点的已知坐标之差,所以,纵、横坐标增量闭合差按公式计算,Fx=∑△x测-(X终-X起)FY=∑△Y测-(Y终-Y起)导线全长闭合差f=√(ƒx2+ƒy2)=0.102m,k=f/∑D=1/38370<1/2000.满足精度要求。
5)根据后一点的坐标及改正后的坐标增量,按公式推算前一点坐标。
X前=X后+△x改Y前=Y后+△Y改最后,推算出终止边的坐标,与原有设计值相等,以作检核。
附合导线平差范例
观测角度形式角度改正数改正后角度方位角度形式边长D°′″°″°°′″°m A D∑109650241096.84665.38相对中误差=F D ∶∑S =1∶2188.22说明:1、表中红色数据为观测值;蓝色数据为已知值;绿色数据为角度、方位角以度(不以度分秒)的表达形式,会自动计2、C19和D19处的数字不能为负或大于60,K列数字不能为负或大于360,否则需人工处理。
测量:记录:计算:审核:4C 27843122125230B 1292175156方位角α180.7322230.3706206.8761202.3833203.115631804354角度观测值(左角)点号31752630243063018180.731667222292.5016667156.505175.506667精度分析附合导线平差计算程序278.72212.87522278.7206212.8756175.507292.50222156.50563344242317.8683133.84154.7180.74148.93301.8361334.7117147.16ΔxΔyυxυyΔx′Δy′xy-357.369-387.255-0.13071-0.27455秒)的表达形式,会自动计算,可隐藏;紫色数据为平差结果。
-137.00277.59672日期:-125.021-0.02926-0.02891-58.5294-125.082-0.06145-0.060723802.8514006.77-70.00253903.6333805.1083833.6313943.138-103.137-30.77924028.533730.436坐标增量计算值(m)坐标增量改正数(m)改正后的坐标增量(m)坐标(m)-0.05522-0.06384-0.03331-0.02629-0.03039-85.3658程序-0.01586-85.3921-138.03-74.6727-103.082-69.9386-30.7459-137.999-74.6568-136.9733671.033619.243593.4333744.32277.62563-58.468。