监督分类与非监督分类
实验四遥感图像的监督分类和非监督分类

实验四遥感图像的监督分类和⾮监督分类实验四遥感图像的⾮监督分类与监督分类⼀、实验⽬的1.⾮监督分类是对数据集中的像元依据统计数字,光谱类似度和光谱距离进⾏分类,在没有⽤户定义的条件下练习使⽤,在ENVI环境下的⾮监督分类技术有两种:迭代⾃组织数据分析技术(ISodata)和K均值算法(K-Means);2.分类过程中应注意:1)怎样确定⼀个最优的波段组合,从⽽达到最佳的分类精度,基于OIF和相关系数,协⽅差矩阵以及经验的使⽤来完成对最适合的组合的选取,分类效果的关键即在于此;2)K-Means的基本原理;3)Isodata的基本原理;4)分类结束后,被分类后的图像是⼀个新的图像,被分类类码秘填充,从⽽可以获得数据提取信息,统计不同类码数量,转化为实际⾯积,在得到后的图像上,可对不同⽬标的形态指标进⾏分析。
3.对训练区中的像元进⾏分类;4.⽤训练数据集估计查看监督分类后的统计参数;5.⽤不同⽅法进⾏监督分类,如最⼩距离法、马⽒距离法和最⼤似然法。
⼆、实验设备与材料1、软件ENVI 4.7软件2、所需材料TM数据三、实验步骤1.选择最优的波段组合ENVI主⼯具栏中File →Open image file →选择hbtmref.img打开→在Basic Tools中选择Statistics →Compute statistics选定原图,在Spectral subset中可选项全部选定→OK →OK →全选→保存→OK,则各类统计数字均可查;OIF计算,选择分类波段:1,2;2,3;1,3波段标准差分别为2.665727;3.473308;4.574609,和为10.713644。
Correlation Matrix 中1和2波段的相关系数0.964308,加上2和3波段的相关系数0.980166,再加上1和3波段的相关系数0.945880,最终等于2.890354。
⽤标准差相加的结果10.713644⽐上相关系数之和2.890354等于3.70668922。
实习8、监督分类与非监督分类
1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigated land 水库reservoir裸地barren land 工业区industrial area滩地shoaly land 林地forest草地grassland 河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择point、polyline、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选Options的统计训练区可分性Compute ROI Separability,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classification |Supervised| Maximum Likelihood,在Set Input File对话框中导入影像。
在打开的对话框中选Select All Items,其中Set Probability Threshold设为NO,Output Rule Image设为No,选择保存路径。
②根据分类的情况修改监督分类后的地物的颜色等信息。
具体操作:在监督分类影像中的Image上选择Overlay |Classification,点击“Supervised”,选择Option |Edit class colors/name 等来修改地物的名称和颜色5. 分类精度评价,从随机采集100~200个样本点,并确保每一类别不少于10个样本;进行分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进行解释。
(完整word版)ENVI监督分类与非监督分类
对照原影像将30种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
结果与分析1、各个样本之间的可分离性.说明哪些地物类型之间较易区分,哪些类型之间难以区分。
Jeffries-Matusita(J—M距离):水稻田水浇地河流居民地草地林地工业区裸地水稻田1。
99982。
00002.00002。
00001.95252.00002。
0000水浇1。
99982.00002。
00001.94941。
98902。
00002.0000Band0。
85 0。
90 0。
88 0.93 1.00 0.97 5Band0.90 0.93 0。
92 0。
92 0。
97 1。
00 63、最大似然法进行监督分类结果:原影像最大似然法进行监督分类结果监督分类的最大似然法分类结果中,主要的地物都可以被区分出来,地物分工业区94.7494.7418/1918/19裸地100.00100。
0042/4242/425、Clump Classes和Sieve classes结果:Clump Classes3*3处理结果:Clump Classes5*5处理结果:在聚类统计的结果上很容易看出原本监督分类的生成结果中严重的椒盐现象消失了,地物类型都相对完整,但有些细节已经被消除看不清楚,3*3窗口与5*5窗口生成的结果区别就在于3*3窗口的细节较5*5窗口的更加清楚具体, 5*5窗口将周边的面积较小的地物完全合并在一起.Sieve classes结果(Number of Neighbors设为8):Sieve classes结果(Number of Neighbors设为4):对影像的过滤分析生成的结果显得椒盐现象更加严重,结果影像上出现了很多小黑点,Number of Neighbors的值设置的越小,小黑点越密集,但是经过过滤分析的影像”孤岛”现象都已经消失。
envi遥感图像监督分类与非监督分类

envi遥感图像监督分类监督分类,又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程.它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。
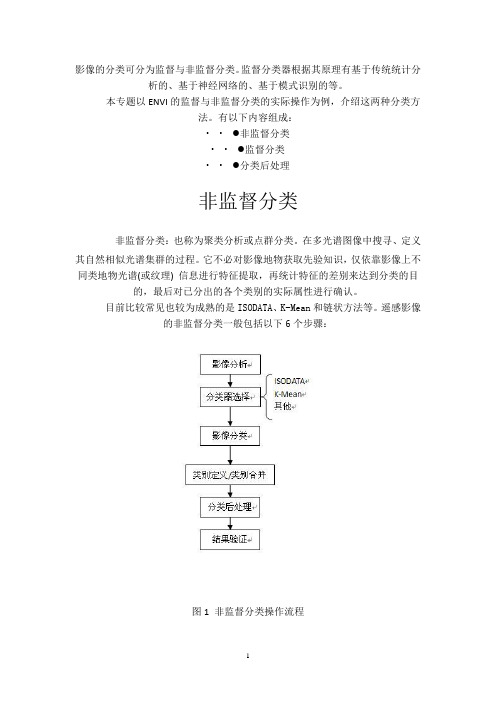
遥感影像的监督分类一般包括以下6个步骤,如下图所示:详细操作步骤第一步:类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理.这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。
启动ENVI5。
1,打开待分类数据:can_tmr。
img。
以R:TM Band 5,G: TM Band 4,B:TM Band 3波段组合显示。
通过目视可分辨六类地物:林地、草地/灌木、耕地、裸地、沙地、其他六类。
第二步:样本选择(1)在图层管理器Layer Manager中,can_tmr.img图层上右键,选择"New Region Of Interest",打开Region of Interest (ROI) Tool面板,下面学习利用选择样本。
1)在Region of Interest (ROI) Tool面板上,设置以下参数:ROI Name:林地ROI Color:2)默认ROIs绘制类型为多边形,在影像上辨别林地区域并单击鼠标左键开始绘制多边形样本,一个多边形绘制结束后,双击鼠标左键或者点击鼠标右键,选择Complete and Accept Polygon,完成一个多边形样本的选择;3)同样方法,在图像别的区域绘制其他样本,样本尽量均匀分布在整个图像上;4)这样就为林地选好了训练样本.注:1、如果要对某个样本进行编辑,可将鼠标移到样本上点击右键,选择Edit record是修改样本,点击Delete record是删除样本。
监督分类和非监督分类
影像的分类可分为监督与非监督分类。
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。
有以下内容组成:∙ ∙ ●非监督分类∙ ∙ ●监督分类∙ ∙ ●分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
遥感影像的非监督分类一般包括以下6个步骤:图1 非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。
一般监督分类设置分类数目比最终分类数量要多2-3倍为宜,这样有助于提高分类精度。
本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
确定在非监督分类中的类别数为15。
2、分类器选择目前非监督分类器比较常用的是ISODATA、K-Mean和链状方法。
ENVI包括了ISODATA和K-Mean方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
3、影像分类打开ENVI,选择主菜单->Classification->Unsupervised->IsoData或者K-Means。
envi遥感图像监督分类与非监督分类
envi遥感图像监督分类监督分类,又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。
它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。
遥感影像的监督分类一般包括以下6个步骤,如下图所示:详细操作步骤第一步:类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理。
这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。
启动ENVI5.1,打开待分类数据:can_tmr.img。
以R:TM Band 5,G: TM Band 4,B:TM Band 3波段组合显示。
通过目视可分辨六类地物:林地、草地/灌木、耕地、裸地、沙地、其他六类。
第二步:样本选择(1)在图层管理器Layer Manager中,can_tmr.img图层上右键,选择"New Region Of Interest",打开Region of Interest (ROI) Tool面板,下面学习利用选择样本。
1)在Region of Interest (ROI) Tool面板上,设置以下参数:ROI Name:林地ROI Color:2)默认ROIs绘制类型为多边形,在影像上辨别林地区域并单击鼠标左键开始绘制多边形样本,一个多边形绘制结束后,双击鼠标左键或者点击鼠标右键,选择Complete and Accept Polygon,完成一个多边形样本的选择;3)同样方法,在图像别的区域绘制其他样本,样本尽量均匀分布在整个图像上;4)这样就为林地选好了训练样本。
遥感影像监督分类与非监督分类的比较
第34 卷第3 期2004 年9 月河南大学学报(自然科学版)Journal of Henan U n iversity ( N at u ral Science)Vol . 34 No . 3Sep . 2004 遥感影像监督分类与非监督分类的比较赵春霞,钱乐祥3(河南大学环境与规划学院,河南开封475001)摘要: 遥感影像的分类方法按照是否有先验类别可以分为监督分类和非监督分类,这两种分类法有着本质的区别但也存在一定的联系. 从分类原理、分类过程、分类方法等不同角度分析了这两种方法的区别与联系,并展望了遥感影像分类的发展趋势与发展前景.关键词: 影像分类;监督分类;非监督分类中图分类号: P237 文献标识码: A 文章编号: 1003 - 4978 (2004) 03 - 0090 - 04Comparative Study of Supervised and U nsupervised C la s sif icationin R emote Sensing Im ageZHAO Chun2xia , Q IAN L e2xiang( Col l ege of En v i ron ment an d Pl a n n i ng , Hen a n U ni v ersi t y , Hen a n Kai f eng 475001 , Chi n a) Abstract : The classificatio n of Remote Sensing image can be divided into t he su pervised classificatio n and t he unsu pervisedto whet her t here is t he extant category. The t wo met hods have difference in essence , but t he y are co nnected wit h each ot her . The article has analyzed t he difference and relatio n of t he t wo met hods f ro m different as pect s such as t he p rinciple , t he course and ways of classificatio n , and forecasted t he tendency and p rospect of t he image classificatio n.K ey w ords : image classificatio n ; supervised classificatio n ; unsu pervised classificatio n遥感影像分类是影像分析的一个重要内容,它是利用计算机通过对影像中不同地物的空间信息和光信息进行分析,选择特征,并将特征空间划分为互不重叠的子空间,然后将影像中各个像元划归到子空间去目前国内国际上对影像分类的研究主要集中在应用具体的物理的、数学的方法等对影像进行的分类研究面1 - 8,对于影像分类方法的研究,从不同的方面可以划分为不同的类型. 按照利用图像要素的不同,影分类大体可以分为三种:一是基于图像灰度值的分类,二是基于图像纹理的分类,三是基于多源信息融合分类9 . 用计算机对影像进行分类应用的主要是模式识别技术,根据具体应用的数学方法不同又可分为:计法(决策分类法) 、语言结构法(句法方法) 、模糊法以及神经网络法. 在影像分类过程中,根据是否已知训样本的分类数据,影像分类方法又可以分为监督分类和非监督分类. 本文主要从分类原理、分类过程、分类法等方面来探讨这两种分类方法的区别与联系.1 监督分类的主要方法最大似然判别法. 也称为贝叶斯(Bayes) 分类,是基于图像统计的监督分类法,也是典型的和应用最广监督分类方法.它建立在Bayes 准则的基础上,偏重于集群分布的统计特性,分类原理是假定训练样本数在光谱空间的分布是服从高斯正态分布规律的,做出样本的概率密度等值线,确定分类,然后通过计算标收稿日期: 2004202209基金项目: 河南省高等学校创新人才培养对象基金项目;河南省杰出青年科学基金项目( 99200003) ; 河南省自然科学基项目(004070700)作者简介: 赵春霞(1980 - ) ,女,河南大学硕士研究生13 通信联系人1(像元) 属于各组(类) 的概率,将标本归属于概率最大的一组. 用最大似然法分类,具体分为三步:首先确定各类的训练样本,再根据训练样本计算各类的统计特征值,建立分类判别函数,最后逐点扫描影像各像元,将像元特征向量代入判别函数,求出其属于各类的概率,将待判断像元归属于最大判别函数值的一组. Bayes 判别分类是建立在Bayes 决策规则基础上的模式识别,它的分类错误最小精度最高,是一种最好的分类方法. 但是传统的人工采样方法由于工作量大,效率低,加上人为误差的干扰,使得分类结果的精度较差. 利用GIS 数据来辅助Bayes 分类,可以提高分类精度,再通过建立知识库,以知识来指导分类的进行,可以减少分类错误的发生1 ,这正是Bayes 分类的发展趋势和提高其分类精度的有效途径.神经元网络分类法. 是最近发展起来的一种具有人工智能的分类方法,包括B P 神经网络、K o ho nen 神经网络、径向基神经网络、模糊神经网络、小波神经网络等各种神经网络分类法. B P神经网络模型(前馈网络模型) 是神经网络的重要模型之一,也是目前应用最广的神经网络模型,它由输入层、隐含层、输出层三部分组成,所采取的学习过程由正向传播过程和反向传播过程组成. 传统的B P网络模型把一组样本的输入/ 输出问题作为一个非线性优化问题,它虽然比一般统计方法要好,但是却存在学习速度慢,不易收敛,效率不高等缺点. 采用动量法和学习率自适应调整的策略,可以提高学习效率并增加算法的可靠性3 .模糊分类法. 由于现实世界中众多的自然或半自然现象很难明确划分种类,反映在遥感影像上,也存在一些混合像素问题,并有大量的同谱异物或者同物异谱现象发生,使得像元的类别难以明确确定. 模糊分类方法忽略了监督分类的训练过程所存在的模糊性,沿用传统的方法,假定训练样本由一组可明确定义、归类, 并且具有代表性的目标(像素) 构成. 监督分类中的模糊分类可以利用神经元网络所具有的良好学习归纳机制、抗差能力和易于扩展成为动态系统等特点,设计一个基于神经元网络技术的模糊分类法来实现. 模糊神经网络模型由A R T 发展到A R TMA P 再到FasA R T 、简化的FasA R T 模型4 ,使得模糊神经网络的监督分类功能不断完善、分类精确度不断增加.最小距离分类法和Fisher 判别分类法. 它们都是基于图像统计的常用的监督分类法,偏重于几何位置.最小距离分类法的原则是各像元点划归到距离它最近距离的类别中心所在的类, Fisher 判别分类采用Fisher 准则即“组间最大距离”的原则,要求组间距离最大而组内的离散性最小,也就是组间均值差异最大而组内离差平方和最小. 用这两种分类法进行分类,其分类精度取决于对已知地物类别的了解和训练统计的精度,也与训练样本数量有关. 针对最小距离分类法受模式散布影响、分类精度不高的缺点,人们提出了一种自适应的最小距离分类法,在训练过程中,将各类样本集合自适应地分解为子集树,定义待分类点到子集树的距离作为分类依据2 ,这种方法有效地提高了最小距离法的分类正确率和分类速度,效率较高. Fisher 判别分类也可以通过增加样本数量进行严密的统计分类来增加分类精度.2 非监督分类的主要方法动态聚类. 它是按某些原则选择一些代表点作为聚类的核心,然后将其余待分点按某种方法(判据准则)分到各类中去,完成初始分类,之后再重新计算各聚类中心,把各点按初始分类判据重新分到各类,完成第一次迭代. 然后修改聚类中心进行下一次迭代,对上次分类结果进行修改,如此反复直到满意为止. 动态聚类的方法是目前非监督分类中比较先进、也较为常用的方法.典型的聚类过程包括以下几步:选定初始集群中心; 用一判据准则进行分类;循环式的检查和修改;输出分类结果.聚类的方法主要有基于最邻近规则的试探法、K - means 均值算法、迭代自组织的数据分析法( ISODA TA) 等.其中比较成熟的是K - means 和ISODA TA 算法,它们较之其他分类方法的优点是把分析判别的统计聚类算法和简单多光谱分类融合在一起,使聚类更准确、客观. 但这些传统的建立在统计方法之上的分类法存在着一定的缺点:很难确定初始化条件;很难确定全局最优分类中心和类别个数;很难融合地学专家知识. 基于尺度空间的分层聚类方法( SSHC) 是一种以热力学非线性动力机制为理论基础的新型聚类算法10 ,它与传统聚类算法相比最大的优点是其样本空间可服从自由分布,可获取最优聚类中心点及类别,可在聚类过程中融合后验知识,有更多的灵活性和实用性.模糊聚类法. 模糊分类根据是否需要先验知识也可以分为监督分类和非监督分类. 事实上,由于遥感影92 河南大学学报(自然科学版) ,2004 年,第34 卷第3 期关系的模糊聚类分析法、基于最大模糊支撑树的模糊聚类分析法等11 ,最典型的模糊聚类法是模糊迭代组织的数据分析法———Fussy - ISODA TA . 但纯粹的非监督分类对影像一无所知的情况下进行所得到的果往往与实际特征存在一定的差异,因此聚类结果的精度并不一定能够满足实际应用的要求,还需要地学识的辅助,也就是部分监督的Fussy - ISODA TA 聚类.系统聚类. 这种方法是将影像中每个像元各自看作一类,计算各类间均值的相关系数矩阵,从中选择相关的两类进行合并形成新类,并重新计算各新类间的相关系数矩阵,再将最相关的两类合并,这样继续去,按照逐步结合的方法进行类与类之间的合并. 直到各个新类间的相关系数小于某个给定的阈值为止.分裂法. 又称等混合距离分类法,它与系统聚类的方法相反,在开始时将所有像元看成一类,求出各变的均值和均方差,按照一定公式计算分裂后两类的中心,再算出各像元到这两类中心的聚类,将像元归并距离最近的那一类去,形成两个新类. 然后再对各个新类进行分类,只要有一个波段的均方差大于规定的值,新类就要分裂.两种分类方法原理及过程的比较遥感影像的监督分类是在已知类别的训练场地上提取各类别训练样本,通过选择特征变量、确定判别数或判别式把影像中的各个像元点划归到各个给定类的分类. 它的基本思想是:首先根据类别的先验知识定判别函数和相应的判别准则,利用一定数量的已知类别样本的观测值确定判别函数中的待定参数,然后未知类别的样本的观测值代入判别函数,再根据判别准则对该样本的所属类别做出判定. 遥感影像的非监分类也称为聚类,它是事先无法知道类别的先验知识,在没有类别先验知识的情况下将所有样本划分为若类别的方法. 它的基本思想是事先不知道类别的先验知识,仅根据地物的光谱特征的相关性或相似性来进分类,再根据实地调查数据比较后确定其类别属性. 二者分类流程如图1 所示.3图1 影像监督分类与非监督分类流程图影像监督分类法与非监督分类法是针对影像具体分类时是否有先验知识而产生的两种方法,二者的用范围、使用条件不同,因而在具体分类时各有一定的优缺点,监督分类与非监督分类的比较如表1 所示.表1 影像不同分类方法的适用范围及优缺点优点缺点适用范围精确度高,准确性好,与实际类别吻合较好监督分类工作量大有先验知识时使用该方法分类结果与实际类别相差较大,准确性差在没有类别先验知识时使用该方法非监督分类工作量小,易于实现影像分类方法的发展前景遥感影像的监督分类和非监督分类方法,是影像分类的最基本、最概括的两种方法. 传统的监督分类非监督分类方法虽然各有优势,但是也都存在一定的不足. 新方法、新理论、新技术的引入,为遥感影像分提供了广阔的前景,监督分类与非监督分类的混合使用更是大大的提高了分类的精度.计算机技术对影像分类的促进与发展. 计算机技术的引进,解决了影像分类中海量数据的计算与管理题;计算机技术支持下的GIS 用来辅助影像分类,主要通过四种模式进行12 : GIS 数据作为影像分析的训样本和先验信息;利用GIS 技术对研究区域场景和影像分层分析; GIS 建立面向对象的影像分类; 提取和掘GIS 中的知识进行专家分析. 这些模式促进了GIS 与遥感的结合,提高了影像分类精确性和准确性,使影像分类迈入了新的天地.数学方法的引入和模型研究的进展为影像分类注入了新的活力. 不同的数学方法被引用到模型研究来,为模型研究的发展提供了广阔的天地,相应地,在遥感影像分类中也产生了大量不同形式的分类模型. 径向基函数( RB F) 与粗糙理论结合的基于粗糙理论的RB F网络模型应用于遥感分类5 ,对于提供分类4度 、增加收敛性都有很好的作用 ;而基于 RB F 映射理论的神经网络模型更是融合了参数化统计分布模型和 非参数化线性感知器映射模型的优点 ,不仅学习速度快 ,而且有高度复杂的映射能力6 . 又如模糊数学理论 应用于影像分类产生模糊聚类 ,对影像中混合像元的分类有很好的效果 ;模糊理论与各种模型结合 ,更使得 影像分类方法的不断完善 ,分类精度不断提高. 人工智能技术对影像分类的促进. 专家分类系统被用于影像分类中 ,利用地学知识和专家系统来辅助遥 感影像分类12 ,大大提高了影像分类和信息提取的精度. 人工神经网络由大量神经元相互连接构成网络结 构 ,通过模拟人脑神经系统的结构和功能应用于影像分类 ,具有一定的智能推理能力 . 同时 ,它还引入了动量 法和学习自适率调整的策略 ,并与地学知识集成 ,很好的解决了专一的 B P 神经网络法分类的缺点和不足 , 提高了分类效率和分类精度.监督分类与非监督分类的结合. 由于遥感数据的数据量大 、类别多以及同物异谱和同谱异物现象的存 在 ,用单一的分类方法对影像进行分类其精确度往往不能满足应用目的要求 . 用监督分类与非监督分类相结 合的方法来对影像进行分类 ,却常常可以到达需要的目的. 利用这种方法分类时首先用监督分类法如多层神 经网络的 B P 算法将遥感图像概略地划分为几个大类 ,再用非监督分类法如 K - Means 聚类和 ISODA TA 聚 类对第一步已分出的各个大类进行细分 ,直到满足要求为止13 . 监督分类与非监督分类的结合的复合分类 方法 ,改变了传统的单一的分类方法对影像进行分类的弊端 ,弥补了其不足 ,为影像分类开辟了广阔的前景. 结论遥感影像的监督分类与非监督分类从内涵 、过程以及具体的分类方法上都不相同 ,它们在分类思路上有 着本质的差别 . 但是 ,作为影像分类的方法 ,它们都有着相同的目的和功效. 因此 ,在影像分类中 ,这两种方法 并不能够完全割裂开来 ,而应该根据实际分类的需要 ,合理科学灵活的运用这两种方法 ,甚至混合使用监督 5 分类与非监督分类 ,以使影像分类达到预期的目的要求. 监督分类与非监督分类方法灵活的使用 ,新的理论 、新的模型 、新技术的运用 ,使得遥感影像分类技术得到长足发展 ,影像分类结果的准确度 、精确度都不断提 高 ,从而更好的为应用服务.参考文献 :游代安 ,蒋定华 ,余旭初 . GIS 辅助下的 Bayes 法遥感影像分类 J . 测绘学院学报 ,2001 ,18 (2) :113 - 117 . 朱建华 ,刘政凯 ,俞能海 . 一种多光谱遥感图象的自适应最小距离分类方法 J . 中国图象图形学报 ,2000 ,5 (1) :22 - 24 . 贾永红 ,张春森 ,王爱平 . 基于 B P 神经网络的多源遥感影像分类 J . 西安科技学院学报 ,2001 ,21 (1) :58 - 60 . 林剑 ,鲍光淑 ,敬荣中 ,等 . FasAR T 模糊神经网络用于遥感图象监督分类的研究 J . 中国图象图形学报 , 2002 , 7 ( 12) : 1263 - 1268 . 巫兆聪 . 基于粗糙理论的 RB F 网络及其遥感影像分类应用 J . 测绘学报 ,2003 ,32 (1) :53 - 57 . 骆剑承 ,周成虎 ,杨艳. 基于径向基函 ( RB F ) 映射理论的遥感影像分类模型研究 J . 中国图象图形学报 ,2000 ,5 ( 2) : 94 - 99 .123456 7 Olivier Debeir , Pat r ice L a tinne , Isabelle Vanden Steen. Remote Sensin g Classificatio n Of S pect r al , spatial And Co n text u al DataU s ing Multiple Classifier System J . Ima ge Anal Stereol , 2001 ,20 ( S uppl 1) : 584 - 589 .8 L a kshmanan V , DeBrunner V , Rabin R. An U n su pervised , Agglo m erative , S patially Aware Text u re Segmentatio n TechniqueE . ht t p :/ / www . cimms. ou. edu/ ~lakshman/ Papers/ diss - t r ansip . p d f曾生根 ,王小敏 ,范瑞彬 ,等 . 基于独立量分析的遥感图像分类技术 J . 遥感学报 ,2004 ,8 (2) :150 - 157 .骆剑承 ,梁怡 ,周成虎. 基于尺度空间的分层聚类方法及其在遥感影像分类中的应用 J . 测绘学报 , 1999 , 28 ( 4) : 319 - 324 .徐建华 . 现代地理学中的数学方法 M . 北京 :高等教育出版社 ,2002 . 王莹 ,刘敏莺 ,黄文骞 . GIS 对遥感影像分类判读的辅助作用 J . 海洋测绘 ,2002 ,22 (3) :12 - 15 . 杨存建 ,周成虎 . 基于知识的遥感图像分类方法的探讨 J . 地理学与国土研究 ,2001 ,17 (1) :72 - 77 . 靳文戟 ,刘政凯 . 多类别遥感图像的复合分类方法 J . 环境遥感 ,1995 ,10 (4) :298 - 302 . 9 10 11121213。
监督分类和非监督分类
各自优缺点:监督分类的特点:主要优点:可充分利用分类地区的先验知识,预先确定分类的类别;可控制训练样本的选择,并可通过反复检验训练样本,以提高分类精度(避免分类中的严重错误);可避免非监督分类中对光谱集群组的重新归类。
主要缺点:人为主观因素较强;训练样本的选取和评估需花费较多的人力、时间;只能识别训练样本中所定义的类别,对于因训练者不知或因数量太少未被定义的类别,监督分类不能识别,从而影响分结果(对土地覆盖类型复杂的地区需特别注意)。
非监督分类特点:主要优点:无需对分类区域有广泛地了解,仅需一定的知识来解释分类出的集群组;人为误差的机会减少,需输入的初始参数较少(往往仅需给出所要分出的集群数量、计算迭代次数、分类误差的阈值等);可以形成范围很小但具有独特光谱特征的集群,所分的类别比监督分类的类别更均质;独特的、覆盖量小的类别均能够被识别。
主要缺点:对其结果需进行大量分析及后处理,才能得到可靠分类结果;分类出的集群与地类间,或对应、或不对应,加上普遍存在的“同物异谱”及“异物同谱”现象,使集群组与类别的匹配难度大;因各类别光谱特征随时间、地形等变化,则不同图像间的光谱集群组无法保持其连续性,难以对比。
一、什么是监督分类与非监督分类?非监督分类:没有训练样本,通过计算哪些相似,划分出不同类别。
先定义光谱可分性,再定义信息类。
是指人们事先对分类过程不施加任何的先验知识,而仅凭数据(遥感影像地物的光谱特征的分布规律),即自然聚类的特性,进行“盲目”的分类;其分类的结果只是对不同类别达到了区分,但并不能确定类别的属性。
监督分类:根据已知训练区提供的样本,通过计算选择特征参数,建立判别函数以对各待分类影像进行的图像分类。
先定义信息类,再定义光谱可分性。
二、它们包括什么?非监督分类包括:1.波谱图形识别分类2.聚类分析监督分类包括:1.最小距离法2.线形判别分析3.最大似然比分类4.最近邻域分类法5.特征曲线窗口法三、二者的优缺点:非监督分类优点:1.人为干预较少,自动化程度较高。
监督分类与非监督分类
缺点
• 主观性; • 由于图象中间类别的光谱差异,使得训练样
本没有很好的代表性; • 训练样本的获取和评估花费较多人力时间; • 只能识别训练中定义的类别。
第 8 章 遥感图像自动识别分类
§8-4 非监督分类
§8-4非监督分类
二 非监督分类 仅凭遥感影像地物的光谱特征的分布规
律,即自然聚类的特性,进行“盲目”的 分类;
否 是
迭代次数=I或相邻两次迭代类别中心变动小于限值
否 否
σ > TS 是
确定分裂后的中心
输出
否
DIK< TC
是
确定并类后的中心
ISODATA算法过程框图
(三) 平行管道法聚类分析
它以地物的光谱特性曲线为基础,同 类地物在特征空间上表现为以特征曲线 为中心,以相似阈值为半径的管子,此 即为所谓的“平行管道”。
(二) ISODATA算法聚类分析
可以自动地进行类别的“合并”和“分 裂”,从而得到类数比较合理的聚类结 果。
迭代次数 每类集群允许
选定初始类别中心
的最大标准差
输入迭代限值参数:I,Tn, TS ,TC
集群允许的最 短距离
对样本像素进行聚类并统计ni,m,σ
每类集群至少 的点数
ni<Tn
是 取消第i类
第 8 章 遥感图像自动识别分类
§8-3 监督分类(续)
原始影像数据的准备
(二) 分类过程
图像变换及特征选择 分类器的设计
初始类别参数的确定 逐个像素的分类判别
形成分类编码图像 输出专题图
▪ 选择样本区域 植被 老城区 耕地 水 新城区
将样本数据在特征空间进行聚类
实习三 遥感图像的监督分类与非监督分类
实验三遥感图像的监督分类与非监督分类[实验目的]1.理解遥感图像的监督分的含义;2.会使用ENVI软件对遥感图像进行监督分类。
[实验原理]在遥感图像分类中,按照是否有已知训练样本的分类依据,分类方法又分为两大类:监督分类与非监督分类。
遥感图像的监督分类是在已知类别的训练场地上提取各类别训练样本,通过选择特征变量、确定判别函数或判别式(判别规则),进而把图像中的各个像元点划归到各个给定类的分类。
遥感图像的非监督分类是在没有先验知识(训练场地)的情况下,根据图像本身的统计特征及自然点群的分布情况来划分地物类别的分类处理,事后再对已分出的各类的地物属性进行确认,也称作“边学习边分类法”。
两者的最大区别在于,监督分类首先给定类别,而非监督分类则由图像数据本身的统计特征来决定。
[实验步骤]一监督分类(数据采用njtmcorrected)监督分类技术需要在执行以前事先定义训练分类器(training classes), 训练分类器也可以用ENVI 感兴趣区(ROI)函数限定。
ENVI的监督分类技术包括平行六面体(平行管道)、最小距离、马氏距离、最大似然、波谱角度制图仪以及二进制编码方法1. “开始”->“程序”->RSI ENVI4.0->ENVI,打开ENVI4.0界面;2. 选择File > Open Image File.3. 当出现Enter Data Filename 对话框,选择要打开的文件名,再点击“OK”,在Available Bands List框里点击Load Band ,图像显示在图像显示窗口。
4. 选择“基本工具”->感兴趣区->ROI工具,弹出ROI Tool对话框。
5. 在ROI_Type菜单里选择建立感兴趣区的类型,可以选择Polygon、Polyline、point、Rectangle、Ellipse等类型。
6. 在Window栏里选择要建立感兴趣区的窗口,可以选择Image、Scroll、Zoom窗口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图像分类一、实验目的1、理解遥感图像分类的基本原理和方法。
2、掌握在ERDAS IMAGINE 软件中进行非监督分类、监督分类的操作流程以及两种分类方法的区别。
3、 了解分类后处理及精度评价原理及过程。
二、 实验设备1、ERDAS IMAGINE 遥感影像处理软件。
三、 实验过程及要求1、 非监督分类ERDAS IMAGINE 使用ISODATA 算法(基于最小光谱距离公式)来进行非监督分类。
聚类过程始于任意聚类平均值或一个已有分类模板的平均值:聚类每重复一次,聚类的平均值就更新一次,新聚类的均值再用于下次聚类循环。
ISODATA 实用程序不断重复,直到最大的循环次数已达到设定阈值或者两次聚类结果相比有达到要求百分比的像元类别已经不再发生变化。
1.1 分类流程图1.2 分类过程1)调出非监督分类对话框在菜单栏中单击Raster → Unsupervised Classification →选择Unsupervised Classification 项,打开Unsupervised Classification 对话框。
影像分析结果验证分类后处理类别定义/类别合并影像分类分类器选择ISODATAK MENA 其它2)进行非监督分类在 Unsupervised Classification 对话框中→Input Raster File (确定输入文件):待分类的图像(此处为经过主成分分析后的图像)。
→Output Cluster Layer (确定输出文件)。
→勾选Output signature Set (选择生成分类模板文件)→ (确定分类模板文件) 。
→Cluster Options:选择 Initiate from Statistics.→分类方法:选择isodata.→Number of Classes(确定初始分类数):7→对于 Initializing Options 和 Color Scheme Options 两项均取缺省值。
→Maximum Iterations(定义最大循环次数):24(一般在应用中将循环次数都取值 6 以上) →Convergence Threshold (设置循环收敛阈值):0.950(取系统默认值)→单击OK 按钮(关闭Unsupervised Classification 对话框,执行非监督分类)下图为分类后的图:1.3 分类评价1)显示原图像与分类图像在视窗中同时显示 prin.img 和 prin_isodata.img,两个图像的叠加顺序为:prin.img (原图)在下,prin_isodata.img(分类图)在上。
在View#1窗口中依次打开原图和分类图。
注意:打开分类图时,select layer to add 对话框中 Raster Options 选择项中的“clear display”不勾选。
则可以保证在一个窗口中同时打开两幅图像。
2)打开分类图像属性表并调整字段属性右键prin_isodata文件,选择Display Attribute Table项,打开Attribute Table 窗口。
在Attribute Table窗口中,8 个记录分别对应产生的7个类及 Unclassified 类,每个记录都有一系列的字段。
如果想看到所有字段,需要用鼠标拖动浏览条。
3)给各个类别赋相应的颜色在Attribute Table窗口中,选中某一类Row字段,单击此类别颜色字段的颜色,即可为该类选择某一颜色,重复操作为所有类选择合适颜色。
4)不透明度的设置由于分类图像覆盖在原图像上面,为了对单个类别的判别精度进行分析,首先要把其它所有类别的不透明度(Opacity)值设为 0(即改为透明),而要分析的类别的透明度设为 1(即不透明)在 Attribute Table中,直接将Opacity 字段中不需要分析的类的值改为0,需要分析的类的值设为 1. 此时,在视窗中只有要分析的类别的颜色显示在原图像的上面,其它类别都是透明的。
如下图:水体的Opacity被设为了0,并按回车键,水体部分的颜色变得与原图一致(即透明)。
可以右键影像→Swipe来查看。
5)确定类别专题意义及其准确程度右键影像→Flicker,打开Flicker工具条,点击Start/Stop开始闪烁,本步是设置分类图像在原图像背景上闪烁,观察它与背景图像之间的关系从而断定该类别的专题意义,并分析其分类准确与否。
6)标注类别的名称在Attribute Table中,单击刚才分析类别的Class Names 字段,并输入其专题意义(如水体、耕地、建筑等),重复第四到第六步直到对所有类别都进行了分析与处理。
得到如下结果:1.4 分类后处理分类重编码主要是针对非监督分类而言的。
由于非监督分类之前,用户对方类地区没有什么了解,所以在非监督分类过程中,一般要定义比最终需要多一定数量的分类数;在完全按照像元灰度值通过 ISODATA 聚类获得分类方案后,首先是对专题分类图像与原始图像对照,判断每个分类的专题属性,然后对相近或类似的分类通过分类重编码进行合并,并定义分类名称和颜色。
→Raster→ Unsupervised Classification→Fuzzy Recode→打开Fuzzy Recode对话框。
→Input Raster File (确定输入文件)→Output Cluster Layer (确定输出文件)→Neighbor Weighting Options:选择By Distance→OK执行编码1.5 精度评价执行了非监督分类之后,需要对分类效果进行评价,ERDAS系统提供了多种分类评价方法,包括分类叠加(classification overlay)、定义阈值(thresholding)、分类编码(recode classes)、精度评估(accuracy assessment)等,下面有侧重的进行。
1分类叠加(ClassificationOverlay)分类叠加就是将专题分类图像与分类原始图像同时在一个视窗中打开,将分类专题层置于上层,通过改变分类专题的透明度(Opacity)及颜色等属性,查看分类专题与原始图像之间的关系。
对于非监视分类结果,通过分类叠加方法来确定种别的专题特性、并评价分类结果。
对监视分类结果,该方法只是查看分类结果的正确性。
2分类重码对分类像元进行了分析之后,可能需要对原来的分类重新进行组合(如将林地1与林地2合并为林地),给部分或所有种别以新的分类值从而产生一个新的分类专题层。
3分类精度评估分类精度评估是将专题分类图像中的特定像元与已知分类的参考像元进行比较,实际工作中经常是将分类数据与地面真值、先前的试验舆图、航空相片或其它数据进行对比的途径之一。
下面是具体的操纵过程:1)在视窗中打开原始图像在Viewer中打开分类前的原始图像,以便进行精度评估。
2)启动精度评估对话框ERDAS菜单条:→Raster→Supervised→AccuracyAssessment→打开Accuracy Assessment对话框Accuracy Assessment 对话框中显示一个精度评估矩阵(Accuracy Assessment Cellarray)。
精度评估矩阵中将包含分类图像若干像元的几个参数和对应的参考像元的分类值。
这个矩阵值可以使用户对分类图像中的特定像元与作为参考的已知分类的像元进行比较,参考像元的分类值是用户自己输进的。
矩阵数据存在分类图像文件中。
3)打开分类专题图像Accuracy Assessment 对话框菜单条:→→打开Classified Image对话框→在Classified Image对话框中确定与视窗中对应的分类专题图像→OK(关闭Classified Image对话框)→返回Accuracy Assessment对话框4)将原始图像视窗与精度评估视窗相连Accuracy Assessment对话框:→工具条:点击SelectViewer图标(或菜单条:选择View菜单的SelectViewer)。
→将光标在显示有原始图像的视窗中点击一下→原始图像视窗与精度评估视窗相连接5)在精度评价对话框中设置随机点的色彩AccuracyAssessment对话框:→菜单条View →ChangeColors菜单项→打开Change color面板→在Points with no Reference确定没有真实参考值的点的颜色→在Points with Reference确定有真实参考值的点的颜色→OK(执行参数设置)→返回Accuracy Assessment对话框6)产生随机点本步操纵将在分类图像中产生一些随机的点,随机点产生之后,需要用户给出随机点的实际种别。
然后,随机点的实际种别与在分类图像的种别将进行比较。
Accuracy Assessment对话框:→Edit →Create/Add Random Points→打开Add Random Points对话框→在search Count中输进1024→在Number of Points中输进20→在Distribution Parameters选择Random单选框→OK(按照参数设置产主随机点)→返回Accuracy Assessment对话框可以看到在AccuracyAssessment对话框的数据表中出现了10个比较点,每个点都有点号、X/Y坐标值、Class、Reference等字段,其中点号、X/Y坐标值字段是有属性值的。
说明:在Add Random Point对话框中, search Count是指确定随机点过程中使用的最多分析像元数,当然这个数目一般都比Number of Point大很多,Number of Points设为20说明是产生20个随机点,假如是做一个正式的分类评价,必须产生20个以上的随机点。
选择Random意味着将产主尽对随机的点位,而不使用任何强制性规则。
Equalized Random 是指每个类将具有同等数目的比较点。
stratified Random是指点数与种别涉及的像元数成比例,但选择该复选框后可以确定一个最小点数(选择Use Minimum Points),以保证小种别也有足够的分析点。
7)显随机点及其种别Accuracy Assessment对话框:→View→ShowAll(所有随机点均以第五步年设置的颜色显示在视窗中)。
→Edit→Show Class Values(各点的种别名出现在数据表的class字段中)。
8)输进参考点的实际种别值Accuracy Assessment对话框:→在数据表的Reference字段输进各个随机点的实际种别值(只不要输进参考点的实际分类值,它在视窗中的色彩就变为第5)步设置的Point With Reference颜色)9)设置分类评价报告输出环境及输出分类评价报告Accuracy Assessment对话框:→Report →Options→通过点击确定分类评价报告的参数→Report→Accuracy Report(产生分类精度报告)→Report→Cell Report(报告有关产生随机点的设置及窗口环境)。