正则化全参数地确定方法.doc
正则表达式解析
正则表达式解析正则表达式(RegularExpression)全称应为正规表达式,是一种文本模式匹配工具,在程序开发中应用极为广泛。
本文将介绍正则表达式的定义、其中常用的字符形式及参数,以及如何解析一个正则表达式,助力大家熟练掌握正则表达式的使用。
一、定义所谓正则表达式,就是一种字符串模式,可以用例来查找、替换或筛选文本。
正则表达式具有一定的局限性,即只能处理文本内容,不能处理图像等其他内容,而且解析正则表达式需要花费一定的时间,所以正则表达式对于处理小文本量的数据是极其有效的,但对于处理大文本量的数据时,为了提高速度可以采用非正则表达式的模式匹配方式。
二、常见字符形式及参数正则表达式有多种字符类型,常见的有:(1)字符字符是常用的正则表达式中的字符类型,即任意字符,可以表示为点号(.),例如:“a.b”以用来表示“ab”、“aab”、“a1b”等;(2)字符集合字符集合是指一组字符的集合,使用方括号表示,例如:“[abc]”“[a-z]”以用来表示“a”、“b”或“c”,也可以表示所有小写英文字母;(3)限定符限定符允许您设置某个字符或字符集合出现的次数,常见的限定符有“+”、“?”、“*”、“{n}”或“{m,n}”等,其中,“+”表示至少出现一次,“?”表示最多出现一次,“*”表示出现 0或多次,“{n}”表示出现 n,“{m,n}”表示出现从 m n,例如:“[a-z]{3}”表示三个小写字母;(4)转义字符转义字符是用来将特殊字符转义为普通字符,其中常用的有反斜杠“”、括号“()”及管道符“|”,例如:“[”表示方括号“[”,“(”表示小括号“(”,“|”表示管道符“|”。
三、解析正则表达式当对一个正则表达式进行解析时,应从字符类型和参数开始,例如:(1)正则表达式“a[bcd]?e*”可以表示:以字符“a”开头,接着是字符集合“[bcd]”的任意一个字符,此字符出现次数由“?”限定,最多出现一次;接着是字符“e”,此字符出现次数由“*”限定,出现次数为 0或多次。
正则化方法

正则化方法正则化方法是一种有效的优化技术,它是用来减少模型的复杂性,避免过拟合,促进模型的泛化性能。
它把模型参数空间中不重要的变量设置为空并移除,以提高模型的效果。
正则化方法可以有效控制过拟合,有助于提高模型的性能和运行效率,在机器学习和深度学习领域得到广泛应用。
正则化方法有多种形式。
常用的正则化方法有L2正则化,L1正则化,Max-norm正则化,Dropout正则化等。
例如,L2正则化(也称为权重衰减)是一种数学技术,它引入了一个系数来改变参数的取值范围。
一般来说,改变参数的系数越大,则缩小参数的范围越多,也就是模型越不复杂,所以参数就越不容易过拟合。
L1正则化也可以减少模型参数的复杂性,它使模型的参数值更接近于0,从而达到降维的效果,有助于改善模型的泛化能力。
Max-norm正则化主要用于约束参数的W矩阵中元素的大小,通过控制模型参数中单个参数值的大小,来减少模型参数的复杂性,从而降低过拟合风险,增加模型的泛化性能。
Dropout正则化是一种常用的深度学习正则化方法,它通过跳过一些神经网络激活函数来简化神经网络结构,从而避免过拟合,增强模型的泛化能力。
正则化可以有效地降低模型的复杂度,让模型在训练集和测试集上的表现更加一致,从而促进模型的有效运用。
正则化方法在实际应用中也存在一定的问题,例如,由于L1正则化会使参数的范围变得非常小,它会使模型的训练变得很慢,并且影响模型的精度。
对于一些复杂的模型,Max-norm正则化可能会限制模型的学习能力,从而影响模型的性能。
正则化方法在实践中表现出很强的耐受性,它可以解决过拟合问题,提高模型的泛化性能。
不同的正则化方法都有各自的优势和劣势,在实际应用中,根据具体情况选择合适的正则化方法,才能最大程度地发挥正则化方法的优势,提高模型的性能。
总之,正则化方法是一种有效的优化技术,它通过减少模型的复杂性,解决过拟合问题,从而提高模型的泛化性能,在机器学习和深度学习领域得到广泛应用。
算子非精确条件下确定正则化参数的种方法

,
( 2 )
参 数选取的模型函数方法 , 特别是文献 [ 8 . 1 0 ] 提出
了线性模型、 指数模型 、 双曲模型与对数模 型的概 念 及其新的模型函数 , 并从单 正则化参数 的选取推 广 到多正则化参数 的选取. 在 许多 实 际应 用领 域 , 如大 气气 溶胶 遥感 反 演 、
江西师 范大 学学 报 ( 自然科 学版 ) J ( )= l l ^ —Y I +O l /l l l , l ( 3 )
时, 测 量数 据不 可 避免 的带 有某 些微 小扰 动 , 这些 微 小 扰动 可 能造 成解 的急 剧 变 化 . 因此 这 类 问题 往 往 是 不适 定或 者 说是 不 稳 定 的. 常用 正 则 化 方 法 来 克
本文针对在算子和观测数据都非精确 的条件下 , 基
于广 义偏பைடு நூலகம்差 原 理研究 正则 化参 数选 取 的模 型 函数 方
第3 8卷 第 1期 2 0 1 4年 1月
江 西 师范 大学 学报 ( 自然科 学 版 ) J o u na r l o f J i a n g x i N o r m a l U n i v e r s i t y ( N a t u r a l S c i e n c e )
确的, 即算子带有扰 动误差. 众所周知 , 算子非精 确 条 件下 正则 化参 数 选 取 的 研究 未见 广 泛展 开 1 0 - 1 1 ] .
收稿 日期 : 2 0 1 3 — 1 0 - 2 5
基金项 目: 国家 自然科 学基 金 ( 1 1 1 6 1 0 0 2 ) , 江 西省 青年科学基金 ( 2 O 1 3 2 B A B 2 l 1 0 l 4 ) 和江西省教育厅科技课题 ( G J J 1 3 4 6 0 ) 资助项 目. 作者 简介 : 胡 彬( 1 9 8 2 - ) , 女, 江西南丰人 , 讲师 , 主要从 事数学物理方程反 问题理论及计算 的研究 :
正则化方法
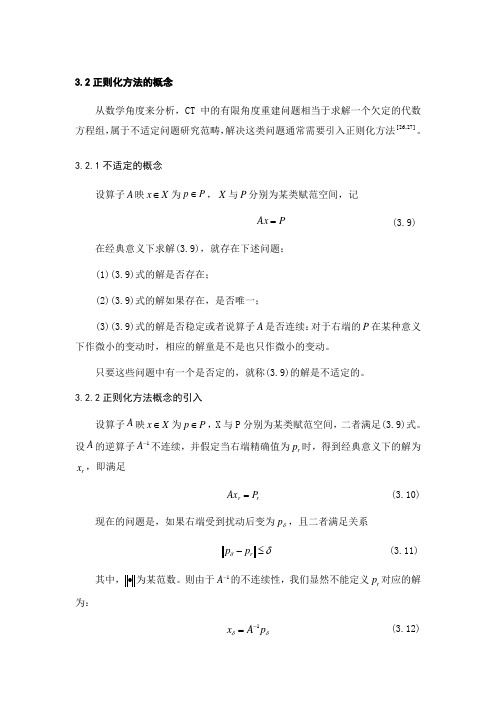
3.2正则化方法的概念从数学角度来分析,CT 中的有限角度重建问题相当于求解一个欠定的代数方程组,属于不适定问题研究范畴,解决这类问题通常需要引入正则化方法]27,26[。
3.2.1不适定的概念设算子A 映X x ∈为P p ∈,X 与P 分别为某类赋范空间,记P Ax = (3.9) 在经典意义下求解(3.9),就存在下述问题:(1)(3.9)式的解是否存在;(2)(3.9)式的解如果存在,是否唯一;(3)(3.9)式的解是否稳定或者说算子A 是否连续:对于右端的P 在某种意义下作微小的变动时,相应的解童是不是也只作微小的变动。
只要这些问题中有一个是否定的,就称(3.9)的解是不适定的。
3.2.2正则化方法概念的引入设算子A 映X x ∈为P p ∈,X 与P 分别为某类赋范空间,二者满足(3.9)式。
设A 的逆算子1-A 不连续,并假定当右端精确值为r p 时,得到经典意义下的解为r x ,即满足r r P Ax = (3.10) 现在的问题是,如果右端受到扰动后变为δp ,且二者满足关系 δδ≤-r p p (3.11) 其中,∙为某范数。
则由于1-A 的不连续性,我们显然不能定义r p 对应的解为:δδp A x 1-= (3.12)因此,必须修改该逆算子的定义。
定义:设算子),(αp R 映p 成x ,且依赖一个参数α,并具有如下性质:(1)存在正数01>δ,使得对于任意0>α,以及r p 的)(1δδδ≤邻域中的p ,即满足 10,δδδ≤<≤-p p r (3.13) 的p ,算子R 有定义。
(2)若对任意的0>ε,都存在),0(1δδ∈及依赖于δ的参数)(δαα=,使得算子),(αp R 映r p 的δ邻域到r x 的ε领域内,即εδαδδ≤-=r x x x p R ,))(,( (3.14) 则称),(αp R 为方程(3.14)中A 的正则逆算子;δx 称为方程(3.14)的正则解,当0→δ时,正则解可以逼近我们所要求的精确解;α称为正则化参数。
正则化简介
正则化(regularization)正则化(regularization)在线性代数理论中,不适定问题通常是由一组线性代数方程定义的,而且这组方程组通常来源于有着很大的条件数的不适定反问题。
大条件数意味着舍入误差或其它误差会严重地影响问题的结果。
反问题有两种形式。
最普遍的形式是已知系统和输出求输入,另一种系统未知的情况通常也被视为反问题。
许多反问题很难被解决,但是其他反问题却很容易得到答案。
显然,易于解决的问题不会比很难解决的问题更能引起人们的兴趣,我们直接解决它们就可以了。
那些很难被解决的问题则被称为不适定的。
一个不适定问题通常是病态的,并且不论是简单地还是复杂地改变问题本身的形式都不会显著地改善病态问题。
另一方面,病态问题不一定是不适定的,因为通过改变问题的形式往往可以改善病态问题。
在严格的数学意义上,我们通常不可能对不适定问题进行求解并得到准确解答。
然而,通过使用我们的先验知识,我们通常有希望能够得到一个接近准确解答的答案。
求解不适定问题的普遍方法是:用一族与原不适定问题相“邻近”的适定问题的解去逼近原问题的解,这种方法称为正则化方法。
如何建立有效的正则化方法是反问题领域中不适定问题研究的重要内容。
通常的正则化方法有基于变分原理的Tikhonov 正则化、各种迭代方法以及其它的一些改进方法,这些方法都是求解不适定问题的有效方法,在各类反问题的研究中被广泛采用,并得到深入研究。
正则化:Normalization,代数几何中的一个概念。
通俗来说,就是给平面不可约代数曲线以某种形式的全纯参数表示。
即对于PC^2中的不可约代数曲线C,寻找一个紧Riemann面C*和一个全纯映射σ:C*→PC^2,使得σ(C*)=C严格的定义如下:设C是不可约平面代数曲线,S是C的奇点的集合。
如果存在紧Riemann面C*及全纯映射σ:C*→PC^2,使得(1) σ(C*)=C (2) σ^(-1)(S)是有限点集 (3)σ:C*\σ^(-1)(S)→C\S是一对一的映射则称(C*,σ)为C的正则化。
一种图像去模糊正则化恢复算法参数确定方法

一种图像去模糊正则化恢复算法参数确定方法吴玲达;郝红星【摘要】为了解决模糊正则化恢复算法中参数确定问题,提出一种正则化参数确定方法,该方法根据降质图像特征计算正则化参数.分析了目前普遍应用的全变分正则化方法和该问题的改进拉格朗日迭代解法(SALSA),分析不同正则化参数对恢复效果的影响,提出的正则化参数确定方法与噪声和原图像梯度大小相关.对不同梯度和噪声图像的不同正则化参数恢复效果进行对比,得到提出的正则化参数确定方法能使恢复图像的改进信噪比处于最大值附近.从实验视觉效果得出,该参数确定方法能够抑制降质图像的噪声并能够尽量恢复原图像细节信息.%A method of determining the regularization parameter is proposed in order to solve the image deblurring problems. The main objective is to get the regularization parameter from the deblurring image. The method starts by considering the famous Total Variation methods and the Split Augmented Lagrangian Shrinkage Algorithm (SALSA) , and then it deals with the effect of the regularization parameter on the result image. The proposed method proves that the parameter is determined by the noise and the gradient of the image. Results of the recovery of images were compared with different gradient and noise, and they help to reach a conclusion that the proposed method maximizes the improvement in Signal to Noise Ratio (ISNR). The method also removed noise and protected the details of the image in the processing of recovery as much as possible.【期刊名称】《国防科技大学学报》【年(卷),期】2012(034)004【总页数】6页(P79-84)【关键词】正则化参数;去模糊;全变分正则化;改进拉格朗日迭代解法【作者】吴玲达;郝红星【作者单位】国防科技大学信息系统与管理学院,湖南长沙410073;装备学院复杂电子系统仿真重点实验室,北京怀柔101400;国防科技大学信息系统与管理学院,湖南长沙410073【正文语种】中文【中图分类】TP391目前,图像的应用领域越来越广泛,包括卫星遥感图像、医学成像,天文学成像等。
如何选择合适的正则化参数

如何选择合适的正则化参数在机器学习领域,正则化是一种常用的技术,用于避免模型过拟合。
正则化参数是用来控制正则化的强度的关键因素。
选择合适的正则化参数对于模型的性能和泛化能力至关重要。
本文将探讨如何选择合适的正则化参数,并介绍几种常用的方法。
一、正则化的概念和作用正则化是一种通过在损失函数中引入额外的惩罚项来控制模型复杂度的技术。
它可以有效地减少模型在训练集上的误差,同时避免过拟合的问题。
正则化的作用是通过惩罚复杂模型的参数,使得模型更加简单,更具有泛化能力。
二、正则化参数的选择方法1. 网格搜索网格搜索是一种常用的方法,用于选择合适的正则化参数。
它通过遍历给定的参数范围,并评估模型在不同参数下的性能,从而选择最优的参数组合。
网格搜索的优点是简单易用,但是当参数范围较大时,计算复杂度较高。
2. 交叉验证交叉验证是一种评估模型性能的方法,也可以用于选择正则化参数。
它将数据集划分为训练集和验证集,然后在不同的参数下训练模型,并在验证集上进行评估。
通过比较不同参数下的性能指标,选择表现最佳的参数。
交叉验证的优点是可以更准确地评估模型性能,但是计算开销较大。
3. 正则化路径正则化路径是一种通过观察正则化参数对模型的影响来选择合适参数的方法。
它可以将正则化参数的取值范围划分为多个区间,然后观察每个区间下模型的性能变化。
通过选择在性能变化较小的区间内的参数值,可以得到合适的正则化参数。
正则化路径的优点是可以直观地观察参数对模型的影响,但是需要较多的计算和实验。
三、正则化参数的影响选择合适的正则化参数可以有效地控制模型的复杂度,从而提高模型的泛化能力。
当正则化参数较小时,模型的复杂度较高,容易出现过拟合的问题;当正则化参数较大时,模型的复杂度较低,容易出现欠拟合的问题。
因此,选择合适的正则化参数是在模型性能和泛化能力之间进行平衡的关键。
四、其他注意事项在选择正则化参数时,还需要考虑以下几个因素:1. 数据集规模:当数据集较小的时候,选择较小的正则化参数可以减少过拟合的风险;当数据集较大时,可以适当增大正则化参数来控制模型复杂度。
常用的正则化方法
常用的正则化方法
正则化是一种用于处理数据的技术,其目的是减少过度拟合,并在训练期间提高模型的泛化能力。
以下是常用的正则化方法:
1. L1正则化
L1正则化是指将模型参数中的一部分强制设为零,以减少输入特征的数量,从而减少过度拟合的可能性。
它的数学形式是将L1范数乘以一个正则化参数加到损失函数上。
2. L2正则化
L2正则化也是一种常用的正则化技术。
它的数学形式是将L2范数乘以一个正则化参数加到损失函数上。
L2正则化约束模型每个参数平方和必须小于一个常数,会让过拟合后的参数变得更小,从而使模型更加简单。
3. Dropout
Dropout是一种在训练过程中随机删除一定比例的输入节点的方法,目的是减少神经网络中过拟合的可能性。
它通过在每个训练批次中随机淘汰节点,来使网络的神经元变得更为独立,提高模型的泛化能力。
4. Early stopping
早停是一种非常简单但实用的正则化方法。
当训练误差和验证误差出现反转为往后继续训练的效果反而不佳时,就应该停止训练。
这样可以防止模型在训练数据上过分拟合,从而提高泛化能力。
5. 数据增强
数据增强是指通过旋转、平移、随机裁剪和颜色变换等方法,产生更多的训练样本,从而减少过度拟合的机会。
当数据不足时,数据增强可以帮助模型更好地学习数据的不同方面,并提高泛化能力。
正则化是一种重要的机器学习技术,可以减少过度拟合问题,提高模型的泛化能力。
以上列出的正则化方法可以在很多情况下提高模型的准确性,并应用在很多领域,如自然语言处理、图像识别和语音识别等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实用标准文案
1.拟最优准则
Tikhonov 指出当数据误差水平和未知时,可根据下面的拟最优准则:
min dx
opt (1-1 )
0 d
来确定正则参数。
其基本思想是:让正则参数以及正则解对该参数的变化率同时稳定在尽可能小的水平上。
2. 广义交叉验证
令
( I A( 2 / m
)) y
V ( )
A( ))]2 (2-1 )
[tr ( I / m
其中, A( ) A h (A *h A h I) 1 A *h,tr (I
m
A( )) k 1
(1
kk
( )),
kk
(
)为 A( ) 的
对角元素。
这样可以取*
满足
V( *) min V ( ) (2-2 )
此法源于统计估计理论中选择最佳模型的PRESS 准则,但比它更稳健。
3. L_曲线法
L 曲线准则是指以log-log尺度来描述与的曲线对比,进而根据该对比结果来确定正则
参数的方法。
其名称由来是基于上述尺度作图时将出现一个明显的L 曲线。
运用L 曲线准则的关键是给出L 曲线偶角的数学定义,进而应用该准则选取参数。
Hanke 等[64]建议定义L 曲线的偶角为L 曲线在log-log尺度下的最大曲率。
令log b Ax,log x,则该曲率作为参数的函数定义为
' '''' '
c( )3(3-1)
((')2( ')2)2
其中“ '”表示关于的微分。
H.W.Engl在文献[40]中指出:在相当多的情况下,L 曲线准则可通过极小化泛函
精彩文档
( ) x b Ax 来实现。
即,选取* 使得
* arg inf ( ) (3-2 )
这一准则更便于在数值计算上加以实施。
但到目前为止 ,还没有相关文献获得过关于L 曲线准则的收敛性结果。
另一方面,有文献己举反例指出了L 曲线准则的不收敛性。
虽然如此,数值计算的结果表明,L 曲线准则与 GCV 一样 ,具有很强的适应性。
4.偏差原理 :
定理 4-1:(Morozov 偏差原理 )[135] 如果( ) 是单值函数,则当U ( A z0, u) 时存在这样的( ),使得:
U ( A
z (
) , u) (4-1 ) ,
式中z0 z | [ z] inf F1 [ ] 。
事实上,令( ) ( ) 2 ,由( ) 的单调性和半连续性,可知( ) 也是单调和半连续的,并且
lim ( ) 0 ,
同时,由 z0的定义以及( ) 的半连续性,对于给定的,可以找到这样的0 0( ),使得:
(0()) (0()) U ( A z 0 ( ), u) ,
由 ( ) 的单值性可导出( ) 的单值性,从而必定存在( ) [0, 0 ] 满足方程(4-1 )。
根据上述定理,若方程
Az u,u F ,u U (4-2 )
的准确右端项u R(A) ,
的近似
u s U
且满足条件:
U
(u ,u ) ;
(0, u )
,而 u
精彩文档
则正则化参数() 存在且唯一。
5.误差极小化准则
Arcangeli 主张由下式来确定正则参数
Axy 0 (5-1)注意到对于每个固定的0 ,函数
( )Ax y 对是连续的,单调递增的,且有
lim ( ) 0,lim ( )
0 (5-2 )(5-3 )
故存在唯一的一个( ) 满足方程(5-1)。
6.无偏差预测风险估计
精彩文档。