一种智能导盲杖的设计
智能导盲杖
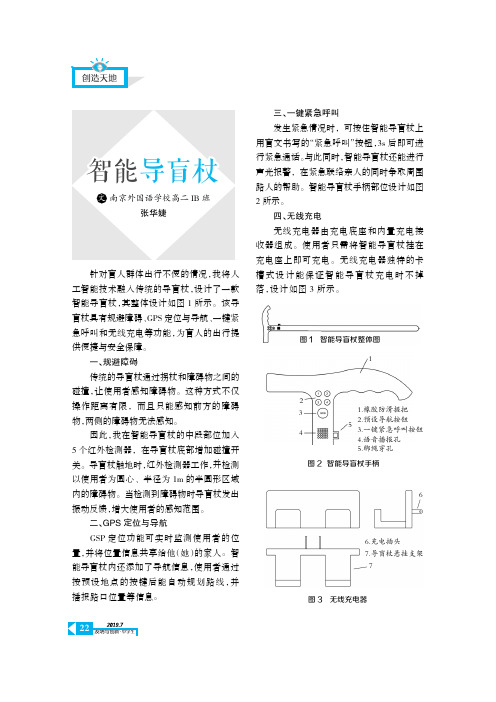
针对盲人群体出行不便的情况,我将人工智能技术融入传统的导盲杖,设计了一款智能导盲杖,其整体设计如图1所示。
该导盲杖具有规避障碍、GPS 定位与导航、一键紧急呼叫和无线充电等功能,为盲人的出行提供便捷与安全保障。
一、规避障碍传统的导盲杖通过拐杖和障碍物之间的碰撞,让使用者感知障碍物。
这种方式不仅操作距离有限,而且只能感知前方的障碍物,两侧的障碍物无法感知。
因此,我在智能导盲杖的中段部位加入5个红外检测器,在导盲杖底部增加碰撞开关。
导盲杖触地时,红外检测器工作,并检测以使用者为圆心、半径为1m 的半圆形区域内的障碍物。
当检测到障碍物时导盲杖发出振动反馈,增大使用者的感知范围。
二、GPS 定位与导航GSP 定位功能可实时监测使用者的位置,并将位置信息共享给他(她)的家人。
智能导盲杖内还添加了导航信息,使用者通过按预设地点的按键后能自动规划路线,并播报路口位置等信息。
三、一键紧急呼叫发生紧急情况时,可按住智能导盲杖上用盲文书写的“紧急呼叫”按钮,3s 后即可进行紧急通话。
与此同时,智能导盲杖还能进行声光报警,在紧急联络亲人的同时争取周围路人的帮助。
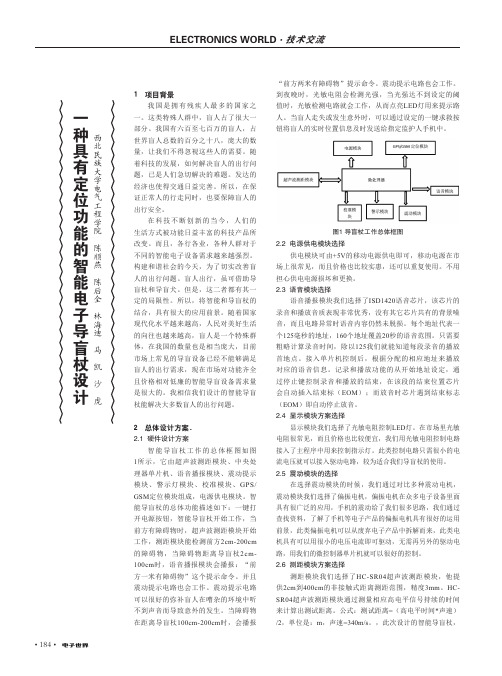
智能导盲杖手柄部位设计如图2所示。
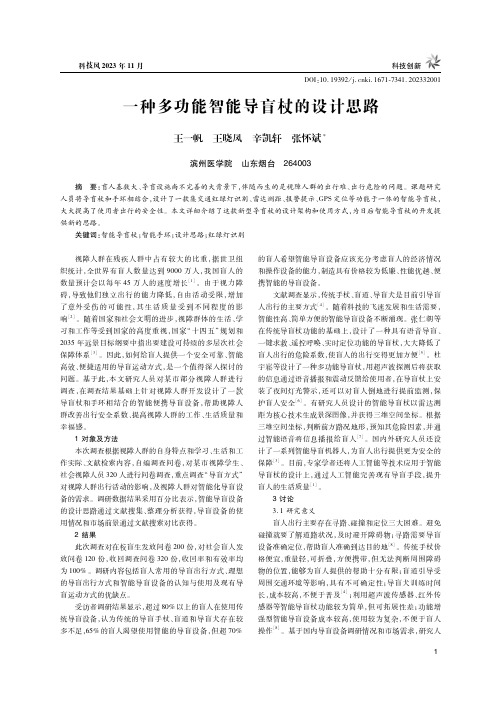
四、无线充电无线充电器由充电底座和内置充电接收器组成。
使用者只需将智能导盲杖挂在充电座上即可充电。
无线充电器独特的卡槽式设计能保证智能导盲杖充电时不掉落,设计如图3所示。
图3无线充电器创造天地766.充电插头7.导盲杖悬挂支架图1智能导盲杖整体图图2智能导盲杖手柄512341.橡胶防滑握把2.预设导航按钮3.一键紧急呼叫按钮4.语音播报孔5.绑绳穿孔。
一种多功能智能盲人用拐杖的设计

一种多功能智能盲人用拐杖的设计
随着科技和社会的发展,智能化产品逐渐渗透到我们的日常生活中,许多智能产品都能为人们的生活带来极大的便利。
在我们谈论智能产品时,往往会遗漏一个群体,那就是盲人。
盲人因为视觉上的障碍,常常在出行、生活中遇到很多困难。
而多功能智能盲人用拐杖的设计,就是为了解决这些问题而诞生的。
本文将探讨一种多功能智能盲人用拐杖的设计,希望能够为盲人朋友们的生活带来更多便利。
这种多功能智能盲人用拐杖的设计将利用现代科技,集成多种功能于一体。
通过感应器、摄像头、声音识别等技术,让盲人用拐杖不仅能够辅助盲人朋友们行走,还能提供语音导航、障碍物识别、环境识别等功能。
当盲人使用该智能拐杖行走时,拐杖会实时感知周围环境,并通过语音提示告知盲人前方是否有障碍物、转弯方向等信息,帮助盲人朋友更加安全自如地行走。
多功能智能盲人用拐杖的设计还可以集成定位功能。
通过GPS、北斗等定位系统,可以精准地定位盲人的位置,并使用语音提示告知盲人当前所在位置、距离目的地的距离和方向等信息。
这样一来,盲人朋友们在外出时就不再迷失方向,可以更加方便地到达目的地。
多功能智能盲人用拐杖的设计还可以集成紧急求助功能。
当盲人遇到紧急情况时,比如走失、遇到危险等,可以通过智能拐杖的紧急按钮发送求助信号,并定位到具体位置,及时得到帮助。
多功能智能盲人用拐杖的设计还可以集成健康监测功能。
通过体温、心率、血压等传感器,可以实时监测盲人的身体健康状况,并通过语音提示提醒盲人朋友及时就医或调整生活方式。
一种具有定位功能的智能电子导盲杖设计
• 184•1 项目背景我国是拥有残疾人最多的国家之一。
这类特殊人群中,盲人占了很大一部分。
我国有六百至七百万的盲人,占世界盲人总数的百分之十八,庞大的数量,让我们不得忽视这些人的需要。
随着科技的发展,如何解决盲人的出行问题,已是人们急切解决的难题。
发达的经济也使得交通日益完善。
所以,在保证正常人的行走同时,也要保障盲人的出行安全。
在科技不断创新的当今,人们的生活方式被功能日益丰富的科技产品所改变。
而且,各行各业,各种人群对于不同的智能电子设备需求越来越强烈。
构建和谐社会的今天,为了切实改善盲人的出行问题。
盲人出行,虽可借助导盲杖和导盲犬。
但是,这二者都有其一定的局限性。
所以,将智能和导盲杖的结合,具有很大的应用前景。
随着国家现代化水平越来越高,人民对美好生活的向往也越来越高,盲人是一个特殊群体,在我国的数量也是相当庞大,目前市场上常见的导盲设备已经不能够满足盲人的出行需求,现在市场对功能齐全且价格相对低廉的智能导盲设备需求量是很大的。
我相信我们设计的智能导盲杖能解决大多数盲人的出行问题。
2 总体设计方案.2.1 硬件设计方案智能导盲杖工作的总体框图如图1所示,它由超声波测距模块、中央处理器单片机、语音播报模块、震动提示模块、警示灯模块、校准模块、GPS/GSM 定位模块组成,电源供电模块。
智能导盲杖的总体功能描述如下:一键打开电源按钮,智能导盲杖开始工作,当前方有障碍物时,超声波测距模块开始工作,测距模块能检测前方2cm-200cm 的障碍物,当障碍物距离导盲杖2cm-100cm 时,语音播报模块会播报:“前方一米有障碍物”这个提示命令。
并且震动提示电路也会工作。
震动提示电路可以很好的弥补盲人在嘈杂的环境中听不到声音而导致意外的发生。
当障碍物在距离导盲杖100cm-200cm 时,会播报“前方两米有障碍物”提示命令。
震动提示电路也会工作。
到夜晚时,光敏电阻会检测光强,当光强达不到设定的阈值时,光敏检测电路就会工作,从而点亮LED 灯用来提示路人。
智能盲杖设计 ppt课件

发 近来发的出命一个令组转后固场,定,按频只照率要非的您接调需触制要式信的射号话频(,13卡.5协6 议MH格z式)进,行通寻过卡天,超线当及声有其波卡匹测片配距处电技在路读术向卡附
器的有效都工可作以范为围所内欲时为,MCU 向卡片发出寻卡命令,卡片将回复卡片类型,
建立卡片与读卡器的第一步联系,与读卡器进行密码校验。 密码验证通过之
原理图
PPT课件
16
TIPS
实现技术
2. 超声波测距技术
RFID识别技术
由MCU发送指令控制超声波发射器向某一方向发射超声波,在发射时
刻的同时,MCU计数器开始计时,超声波在空气中传播,途中碰到障碍物就
立即返回来,超声波接收器收到反射波就使MCU产生中超断声,波MC测U距立技即术停止
计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可
阅读器读取的数据和超声波测距测到的数据发送给智能手机,智能手机收到 后对数据进行识别和处理,并作出响应,例如,播报附近地理信息、提醒前 方障碍等。
与智能手机结合
PPT课件
18
创新点
PPT课件
19
创新点
智能手机与盲杖的结合
采用RFID识别技术
蓝牙连接手机与智能盲杖
超声波测距探测障碍物
PPT课件
20
PPT课件
24
以计算出发射点距障碍物的距离(s),即:s=340t/2 。这就是所谓的时间差测
距法。
与智能手机结合
PPT课件
17
TIPS
实现技术
3. 与智能手机结合
RFID识别技术
如今的智能手机都会配有蓝牙设备,蓝牙设备的功耗低,所蓝牙以是单 片机和智能手机互联的首选。
基于多传感器融合技术的智能导盲杖的设计

表1:实验数据及结果
实验结果显示,本设计的准确度和使用体验均达到了较高的水平。但仍需继 续优化和完善设计,以提高各项指标。
未来展望
基于红外测距传感器和摄像识别功能的智能盲杖具有很大的发展潜力。未来, 可以考虑以下几个方面的发展方向:
1、技术提升:随着科技的不断进步,可以引入更先进的传感器和识别技术, 以提高智能盲杖的各项指标。例如,利用深度学习算法提高图像识别的准确度, 或者采用更高精度的红外测距传感器。
设计思路
红外测距传感器和摄像识别功能是本次演示设计的核心。红外测距传感器能 够检测到前方障碍物的距离,为视障人士提供更为精确的导航信息;而摄像识别 功能则可以帮助视障人士识别路标、交通信号灯等关键信息。将这两种功能结合 在一起,可以使得智能盲杖更为智能化,更好地满足视障人士的需求。
实现方法
1、硬件设备
总之,基于红外测距传感器和摄像识别功能的智能盲杖设计具有很高的实用 价值和市场潜力。通过不断的技术提升和改进完善,相信未来的智能盲杖能够为 视障人士提供更加优质、便捷的生活支持。
谢谢观看
2、增加交互功能:在未来的设计中,可以考虑增加智能盲杖的交互功能, 例如与手机或其他智能设备的连接,以便为使用者提供更多的信息和辅助。
3、个性化定制:根据不同视障人士的需求,可以定制个性化的智能盲杖, 例如外观设计、功能设置等,以提供更贴心的服务。
4、政策推广与合作:积极与政府、企业等相关方合作,推动智能盲杖的普 及和应导航系统,可以将识别到的地形和路径 信息以语音的形式传达给用户,方便用户了解周围环境。
5、紧急求助:当用户遇到紧急情况时,可以通过触摸屏或语音控制智能导 盲杖发出求救信号,向家人或救援人员寻求帮助。
智能导盲杖的应用前景
一种多功能智能盲人用拐杖的设计

一种多功能智能盲人用拐杖的设计【摘要】本文介绍了一种多功能智能盲人用拐杖的设计。
在传感器技术的支持下,该拐杖能够实现智能导航和障碍物检测功能。
拐杖还设计了智能语音互动功能和紧急求助装置,提高了盲人在日常生活中的安全性和便利性。
设计考虑因素包括轻便舒适的外观和易于操作的界面。
结论部分总结了设计成果,并展望了未来发展方向,认为该技术有广阔的推广应用前景,能够为盲人群体提供更多便利和安全保障。
通过本设计,盲人将能够更加独立自主地生活,享受生活的乐趣。
【关键词】智能盲人用拐杖、多功能设计、传感器技术、导航系统、智能语音互动、紧急求助、设计考虑因素、设计成果总结、未来展望、推广应用前景。
1. 引言1.1 背景介绍盲人是社会中的弱势群体之一,拥有良好的盲人辅助工具对于他们的生活至关重要。
传统的盲人用拐杖只能提供基本的支撑功能,无法为盲人提供更多的帮助。
设计一种多功能智能盲人用拐杖成为了一个具有挑战性和重要性的课题。
现代科技的发展为解决盲人出行和生活中遇到的困难提供了新的可能。
传感器技术的应用可以帮助盲人更准确地感知周围环境,避免碰撞和危险;导航系统设计可以帮助盲人更方便地找到目的地;智能语音互动功能可以让盲人更便捷地获取信息和进行交流;紧急求助装置可以在紧急情况下及时呼叫援助。
设计一种多功能智能盲人用拐杖以提升盲人的生活质量和独立性是非常有意义和价值的。
本研究的目的就是通过综合运用各种高新技术,设计一种功能强大、实用性强的智能盲人用拐杖,为盲人提供更便捷、安全的出行体验。
1.2 问题提出盲人是社会中的弱势群体之一,日常生活中常常面临各种困难和挑战。
行走时的安全问题是他们最为关注的一个方面。
传统的盲人用拐杖虽然可以帮助盲人识别前方障碍物,但功能单一,无法提供更多实用的辅助功能。
设计一种多功能智能盲人用拐杖成为了当前的需求之一。
盲人在行走过程中不仅需要避开障碍物,还需要准确地找到目的地。
传统的盲人用拐杖无法提供导航功能,给盲人的出行带来了一定的困难。
一种多功能智能导盲杖的设计思路
对视障人群出行活动的影响及视障人群对智能化导盲设 盲人的生活质量$
备的需求 调研数据结果采用百分比表示智能导盲设备 讨论
的设计思路通过文献搜集整理分析获得导盲设备的使 (&$ 研究意义
用情况和市场前景通过文献搜索对比获得
盲人出行主要存在寻路碰撞和定位三大困难 避免
结果
碰撞就要了解道路状况及时避开障碍物寻路需要导盲
盲杖从手中滑落而找不到时"可按下手环显示屏旁边的盲 %:&赵庆帅"腾浩"刘谦"等&智能导盲设备的研究现状
杖找回键"通过蓝牙与导盲杖对接"导盲杖即可发出声音"
山东工业技术 %=&&
")%))')( )))2):&
提示盲人导盲杖的位置% 新增的蓝牙找回功能"有效避免 %'&于琳"汤唯业"陈聪"等&多功能导盲杖%=&&科技与
备专用手环联网导航平台"提高视障人群运动安全"节约 全&运算能力强大的人工智能进行信号传输&接受&检测和
时间成本和经济成本"提高视障人群的学习&生活和工作 运算处理"进而指挥各个单元器件发挥功能% 总体设计架
质量%
构如图$ 所示%
图$ 总体设计架构
(&( 产品结构与功能 (&(&$ 产品外体结构 (&(&) 导盲杖功能 导盲杖的材质为铝合金"全长$(8,;"折叠后(8,;"手 柄长度)%,;&宽度0,;"便于携带"外观结构如图) 所示% 手环采用市场上常见手环"提高使用的舒适感和方便程 度"外观结构如图( 所示%
智能导盲拐杖的设计毕业论文
天津职业技术师范大学Tianjin University of Technology and Education毕业论文专业:班级学号:学生姓名:指导教师:二〇一三年六月天津职业技术师范大学本科生毕业设计基于单片机电子导盲拐杖设计Electron blind-guide crutch design based on MCU专业班级:学生姓名指导教师:学院:电子工程学院2013年06月摘要随着社会的发展,在社会生活中应用超声波测距技术已很广泛,如汽车倒车雷达、测距仪和物位测量仪等都可以通过超声波来实现。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声测距技术的研究和开发具有实际意义。
本设计研究为盲人提供行走时,遇到前方障碍物提前躲避的预警系统。
以AT89S52作为核心处理器,采用超声波回波时间差测量人与物体之间的安全距离,实现了提前预警使用者避让障碍物,起到避免安全隐患的作用。
该系统是基于AT89S52单片机的超声波测距系统,它根据超声波在空气中传播的反射原理,以超声波传感器为检测部件, 应用超声波在空气中传播的时间差来测量距离。
夜晚时利用光敏传感器控制警示灯开关,警示来往车辆避让。
另有时间播报功能。
主要由测距系统(包括超声波发射模块、超声波接收模块)和语音报警系统,时间播报系统,警示灯控制系统,稳压电源,五个主要模块构成。
该设计利用AT89S52单片机系统的I/O口,控制超声波传感器发出40KHz的超声波,利用反射回来的超声波信号,经过放大、整形、滤波等电路回到单片机,比较调试后确定与障碍物之间的距离,完成测距。
该装置将单片机的实时控制及数据处理功能,与超声波的测距技术、传感器技术相结合。
语音系统发出警示音,提醒使用者前方障碍物需躲避。
使盲人在看不见的情况下,能够识别前方的障碍物正常的行走,从而起到保护盲人安全的作用。
关键词:智能避障;超声波测距;AT89S52单片机ABSTRACTWith the development of society,It is applied widely by ultrasonic to measure distance, such as cars reversing radar,range finder and level measurement and so on. Because of the strong point of ultrasonic, low energy consumption, long distance transporting in media, thus it is practical and significant to measure distance by ultrasonic.This design study for the blind to walk, meet obstacles ahead of early warning system. AT89S52 as the core processor, USES the ultrasonic echo time difference measuring safety distance between people and objects, implement the early warning users avoid obstacles, avoid safe hidden trouble.Is the system of ultrasonic ranging system based on AT89S52 microcontroller, it is based on the reflection principle of ultrasonic wave in air and in ultrasonic sensors for detection components, application of ultrasonic wave in air time difference to measure distance. Night when using photosensitive sensor warning light switch control, avoidance of traffic warning. Otherwise time function. Mainly by the ranging system (including ultrasonic transmitting module, ultrasonic receiver module) and voice alarm system, time to broadcast system, warning lights, control system, regulated power supply, the five major modules.The design USES AT89S52 single chip microcomputer system I/O mouth, control issue of 40 KHZ ultrasonic ultrasonic sensor, using the reflected ultrasonic wave signal, after amplification, plastic, such as filter circuit back to the single-chip microcomputer, is after the debugging and the distance between the obstacles, to complete the range.The device will single-chip microcomputer real-time control and data processing capabilities, combined with ultrasonic ranging technology, sensor technology. Issued a warning sound, voice system remind users in front of the obstacles to avoid. Under the condition of the invisible for the blind and can identify the obstacles in front of the normal walking, which play a role to protect the safety of the blind.Key Words:Intelligent obstacle avoidance ;Ultrasonic ranging;Single chip microcomputer目录1.引言 (1)1.1设计研究的背景及意义 (1)1.2设计研究的内容 (1)1.3本章小结 (2)2.超声波系统的工作原理及方案 (3)2.1 超声的概述 (3)2.2超声波传感器 (3)2.3超声波测量中盲区及近限和远限 (4)2.4 超声测距的方案 (4)2.5本章小结 (5)3.智能导盲拐杖硬件系统设计 (6)3.1设计实现的功能 (6)3.2设计思路 (6)3.3硬件电路设计 (7)3.3.1 CPU模块 (7)3.3.2超声波换能模块 (10)3.3.3语音播报模块设计 (15)3.3.4温度检测模块和时钟模块的设计 (16)3.3.5灯光示警模块设计 (18)3.3.6 稳压电源模块的设计 (19)3.4本章小结 (20)4.智能导盲拐杖软件设计 (21)4.1系统软件设计语言 (21)4.2 软件设计心得 (21)4.3设计的软件环境简介 (21)4.4主要模块软件设计流程图 (23)4.5本章小结 (24)5系统的调试结果 (25)结论 (26)参考文献 (27)致 (28)附录1:部分主电路原理图 (29)附录2:部分主程序 (30)1.引言我国曾在上世纪90年代进行过视力残疾状况的调查,结果显示,我国有视力残疾患者近1400万,其中盲人约就有620万。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种智能导盲杖的设计
为了帮助盲人更好地独立行走与生活,在传统导盲杖的基础上,以单片机为控制核心,利用光感技术和三角形测距技术,改进设计出一款智能导盲杖。
在传统导盲杖的基础上,对三个部分进行了改进,分别是手柄的设计、杖身的设计和越障轮的设计,以此来切实保障盲人出行的安全。
在保留传统导盲杖基础功能的基础上,智能导盲杖可以更人性化地改善盲人的生活质量。
标签:导盲杖;单片机技术;红外探测器
Abstract:In order to help blind people walk and live independently,an intelligent blind guide rod is designed based on the traditional guide rod,using single chip microcomputer as the control core,using light sensing technology and triangle ranging technology. On the basis of the traditional guide rod,three parts are improved,namely,the design of the handle,the design of the staff body and the design of the obstacle wheel,so as to ensure the safety of the blind travel. On the basis of retaining the basic function of the traditional guide stick,the intelligent guide rod can improve the quality of life of the blind more humanized.
Keywords:blind guide rod;single chip microcomputer technology;infrared detector
盲人作为社会中的特殊群体,需要这个社会更多的关怀和帮助[1]。
目前我国有超过1400万的盲人,随着社会智能化的不断发展,仅仅是一根传统导盲杖已经远远不能满足盲人的出行需求了[2]。
智能导盲杖利用智能手机与传统拐杖相结合的优势,可以使盲人的生活更便捷、出行更安全。
1 结构设计和控制方案
智能导盲杖在结构上包括手柄、杖身和越障轮三部分。
越障轮上安装的红外线发射器对前方的道路状况进行检测,再通过控制系统处理,最后由语音模块输出语音信息来告诉盲人周围的路况。
1.1 手柄的设计
手柄上增加了控制面板,有多项功能:(1)控制面板里包含GPS定位系统。
(2)控制面板里包含报警系统。
(3)面板两侧增添了防滑橡胶。
(4)面板前端安置了反光板。
(5)面板上还有娱乐设置,能够进行音乐播放、收音机播放等功能。
手柄的结构示意图如图1所示。
智能导盲杖在传统导盲杖的基础上增加了手柄上的控制结构,所述控制结构包含控制面板、GPS功能、防滑橡胶结构和反光板。
增加了控制面板结构,能够让盲人在遇到危险情况时进行紧急呼叫,通过GPS功能实现与家人间的位置信
息共享,帮助家人及时了解盲人所在位置。
同时增加了娱乐设置,能够利用音乐播放、收音机播放等功能,帮助盲人放松身心,享受生活。
同时,考虑到盲人的出行安全,在手柄侧面设计了防滑橡胶结构,在前面位置设计了反光面板,提示行人车辆注意盲人。
反光板固定在正前方,用来提醒前方行人或车辆注意盲人,防滑橡胶结构固定在两侧,用来防止盲人脱手还增强了盲人触摸的手感以便于更好的找到手把的位置,最上方后侧的大按钮是呼救按钮,按下之后会自动进行呼救,内置GPS定位系统,时刻记录着盲人的去向,此外还有音乐播放器,收音机等功能,用来帮助盲人放松心情。
1.2 杖身的设计
杖身结构采用可嵌套式伸缩结构,共分为三节,每节之间利用螺纹结构连接,设计了防拖出结构,长度调节主要依靠一、二节之间的调节结构实现。
杖身的结构如图2所示。
其连杆结构原理是:把几根杆状物用一定的方式连接起来,中间有铰节,滑动连接等,使它们在特定的范围按设定的动作运动。
各杆的长短,铰接的位置,滑套滑动的距离,事先计算好以实现伸缩和防脱出。
一、二节的调节是最下面的杆子和中间的杆子的调节,用来实现导盲杖的长度。
1.3 越障轮的设计
智能导盲杖增添了越障轮结构,轮子两端采用红外发射与接收结构进行测距,不但能够识别障碍物,更能提示障礙物间的宽度。
同时,通过轮子的滚动,盲人能够直观的感觉到路面的起伏等信息。
滚轮组件包括两个滚轮本体(1)、固定轴(2)、CCD检测器(3)和红外发射器(4),两个滚轮本体(1)关于固定轴(2)对称可旋转地设置在固定轴(2)上,固定轴(2)的一端固定有CCD检测器(3),另一端固定有红外发射器(4)。
2 三角形测距原理的应用
智能导盲杖采用了红外线发射器和CCD接收器来对物体进行测距。
其核心原理是三角形测距原理。
该红外线发射器安装在三角形的一角,实现自身与测量物体之间的距离。
被测量的物体需要具有漫反射之类的反射体。
如石头、树木等[3]。
三角形测距的主要思想是把发射端和接收端放在轮子的轴上,相当于三角形的底边,然后被测物体相当于三角形的顶端。
红外线发射器会按照设定好的角度α发射红外线,当发射的红外线碰撞到障碍物体时就会被反射到CCD的检测板上。
在CCD的中心位置有一个偏移量L,伴随着探测器与被测物体之间的距离D,偏移量L会随着D的变化而变化。
根据三角形之间的关系,在知道了发射角度α,中心距X,偏移量L以及滤镜的焦距f的情况下,可以利用公式把自身与被测物体之间的距离D计算出来[4]。
我们把红外线发射器固定在轮子一侧,红外线发射的发射角度α,中心距X,偏移量L以及滤镜的焦距f为常数,故被测物体的距离D只与反射光线在CCD上的偏移量L有关。
所以被测物体的距离
D和反射光线在CCD上的偏移量L存在一定的比例关系,即发射器的电压信号与被测物体的距离D有函数关系。
通过监测红外线发射器的输出电压,并对其进行采集、分析和运算,就可以得到自身与被测物体表面的距离D。
3 系统运行的流程
控制系统的核心是单片机控制运行,其具有数字输入/输出端口和模拟输入/输出端口。
其中模拟端口可以监测到红外线发射器发出的模拟电压信号,然后根据D/A转换器转换,通过内部的公式计算出当前自身距离被测物体的距离,然后再根据所得到的距离进行判断,最后根据系统的判断决定是否做出语音播报。
控制系统的工作流程简述如下:红外线发射器检测路况,经过D/A转换成对应的距离信号,单片机系统进行处理和距离判断,若距离小于安全设定值,语音模块输出语音信息提醒盲人;若距离不小于设定值,继续红外线检测。
4 结束语
智能导盲杖选用单片机作为核心处理系统,采用了红外线发射器来测量物体与盲人之间的距离,并结合语音模块来告知盲人前方是否有障碍物,可以有效地帮助盲人安全、高效率地行走。
经过电路上的测试后,进行了多次模拟实验。
在100平方米的树林里,树与树之间的间隔大约有5米,然后进行盲人测试。
通过测试,测试人员没有一次撞倒树木。
根据多次测试,更加验证了该导盲杖的可行性与可靠性。
参考文献:
[1]杨国建,石秀娟,潘鸿雁,等.基于spce061的智能盲人导航系统[J].工业控制计算机,2010,23(3):93-94.
[2]许丽,曹胜男,唐立伟.基于AT89c51的智能手杖设计与实现[J].太原师范学院学报,2009,8(4):66-69.
[3]林小倩,林斌,潘泰才.基于CMOS单点激光三角法测距系统设计[J].光学仪器,2006,28(2):27-30.
[4]李晓天,张铁强,张胜勇,等.基于激光三角法的小物体尺寸测量及三维重构系统[J].光学仪器,2008,30(6):21-26.
[5]刘颜.基于DPS的移动机器人控制系统设计与避障算法的实现[D].北京:北京交通大学,2007.。