振动力学第四章
大学物理 第4章机械振动(完全版)

注意:研究简谐振动时,坐标原点只能取在平衡位置。
平衡位置: k
F
外
0, 或 M外 0
o (原长) (平衡位置)
m
x
21
4.4简谐振动的能量 x =Acos( t+ ) =- Asin( t+ )
振动势能: E p 振动动能:Ek
1 2 1 kx
2
k
o (原长) (平衡位置)
m
o (原长) (平衡位置) x
o
x
xo (平衡位置)
(原长)
m
1 2 kx
2
Ep
弹
E p振
E p振 E p弹 1 2
1 2
kx
2
k ( xo x)
2
24
例题如图,有一光滑水平面上的弹簧振子,弹簧的 倔强系数k=24N/m, 物体的质量m=6kg, 静止在平衡位 置。设以一水平恒力F=10N向左作用于物体,使之由 平衡位置向左运动了s=0.05m, 此时撤去外力F。取物 体运动到左方最远处开始计时,求:(1)物体的运动方 程; (2)何处Ek=Ep? 解 (1) k
质点的简谐振动状态由下面两个物理量确定: x =Acos( t+ )
dx dt
A sin( t )
显然,它们由相位唯一确定。
5
五 .振动的超前与落后
设有两个同频率的谐振动: x1=A1cos( t+1) x2=A2cos( t+2) 振动x2超前x1(2 -1) ; >0, =0, 振动x2和x1同相 ; 相差 =2 -1 <0, 振动x2落后x1(2 -1) ; =, 振动x2和x1反相 。
振动力学[PDF]
![振动力学[PDF]](https://img.taocdn.com/s3/m/92c08dc6250c844769eae009581b6bd97f19bcea.png)
第四章多自由度系统的振动4.1多自由度系统运动方程的建立4.2 耦合与坐标变换4.3 固有频率和主振型4.4振型矩阵、主坐标和正则坐标4.5 固有频率相等的情况4.6 固有频率为零的情况4.7 无阻尼系统对初始条件的响应4.8 无阻尼系统对任意激励的响应4.9 多自由度系统的阻尼4.10 有阻尼系统的响应4.11 一般粘性阻尼系统的响应一般粘性阻尼系统的响应i nj nj j j i j j i nj j j i ==•=••111i n j n j j j i j j i n j j j i Q q k q c q m =++∑∑∑==•=••111•••[][]{}[]{}{}Q q k q c q m =++⎭⎬⎫⎩⎨⎧•••nn n n n n 212222111211212222111211nn n n n n 212222111211212222111211nn n n n n 212222111211212222111211••••••n 11•••n 11n 11n 11inj nj j j i j j i nj j j i ==•=••111i n j n j j j i j j i n j j j i P x k x c x m =++∑∑∑==•=••111•••[][]{}[]{}{}P x k x c x m =++⎭⎬⎫⎩⎨⎧•••n 2121•i ••i1m 12m 23m 3ii •i i Q q Dq T =∂∂+∂∂•1m 12m 23m 32222)2221k +2222•2221⎟⎠⎞+•x c jjj j q W δδ11x δ11P 111x P δ1x δ22P 33P 2⎟⎠⎞21221212212111••••122121221211123323212332321222•••••2332321233232122233323332333••••33323332333•••••••••321333322221321321321333322221321321000000003213213333222213213213333222210•1•1θv ••2θv •1•=1θ•2•=2θ22θ−+mg l 22θl +k Oθ222yk+=•••[][]{}[]{}{}P x k x c x m =++⎭⎬⎫⎩⎨⎧•••••••••n n i j j i i 1111•••nn i j j i i 1111in n i j j i i 1111i j刚度影响系数k i j 若系统各自由度的广义速度和广义加速度为零,除j i i j i 。
大学物理 新 4 振动
v0 M
v m
x 解:(1).x处物块动力学方程
(m M ) d 2x dt 2
x (m M )g k( Mg x)
o
k
o = mg kx
正确解:(m
M)
d2x dt 2
(m
M
)g
k( m
M)g k
x=
kx
k T 2 M m
22
mM
t 0 : A Acos
2
3
v0 A sin 0
3
66
振动(Vibration)
t 1: x1 0, v1 0
x
A
3
2
0
t 1: 0 Acos( )
3
32
v1
A
sin(
3ቤተ መጻሕፍቲ ባይዱ
)
0
(2). 2
t T
t
2
t 0.5 5 5
6 12
A 1.0
dt
1。运动方程中各物理量
(1)周期、频率、角频率
周期T:完成一全振动所需的时间
x = Acos(ω t + ) = A cos ω (t + T )+
一个周期后位移相等,所以
ω T = 2π 11
振动(Vibration)
数学式
T 2
弹簧振子T 2 m /k
单 摆T 2 l /g
复摆T 2 J / mgh
P
x
33
振动(Vibration)
M
P
x
34
振动(Vibration)
M
P
x
35
机械振动基础
第4章 机械振动基础4-1 图示两个弹簧的刚性系数分别为k 1 = 5 kN/m ,k 2 = 3 kN/m 。
物块重量m = 4 kg 。
求物体自由振动的周期。
解:根据单自由度系统自由振动的固有频率公式 mk =n ω 解出周期 nπ2ω=T图(a )为两弹簧串联,其等效刚度 2121eq k k k k k +=所以 )(2121n k k m k k +=ω2121n)(π2π2k k k k m T +==ω代入数据得s 290.0300050003000)4(5000π2=⨯+=T图(b )为两弹簧串联(情况同a ) 所以 T = 0.290 s图(c )为两弹簧并联。
等效刚度 k eq = k 1 + k 2 所以 mk k 21n +=ω21nπ2π2k k mT +==ω代入数据得 T = 0.140 s图(d )为两弹簧并联(情况实质上同(c ))。
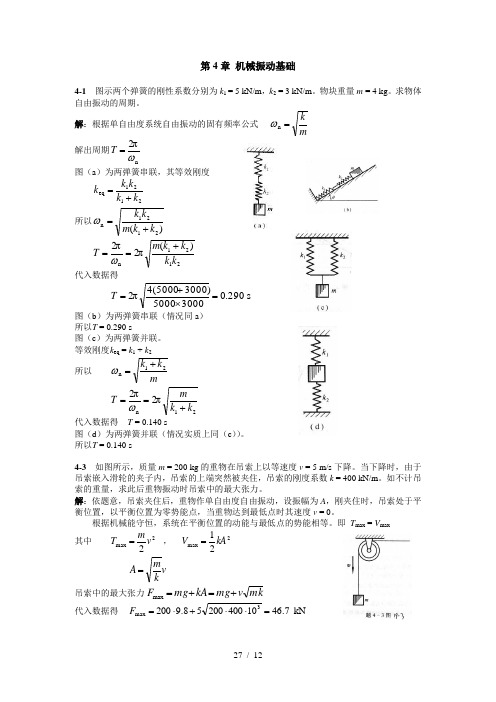
所以 T = 0.140 s4-3 如图所示,质量m = 200 kg 的重物在吊索上以等速度v = 5 m/s 下降。
当下降时,由于吊索嵌入滑轮的夹子内,吊索的上端突然被夹住,吊索的刚度系数k = 400 kN/m 。
如不计吊索的重量,求此后重物振动时吊索中的最大张力。
解:依题意,吊索夹住后,重物作单自由度自由振动,设振幅为A ,刚夹住时,吊索处于平衡位置,以平衡位置为零势能点,当重物达到最低点时其速度v = 0。
根据机械能守恒,系统在平衡位置的动能与最低点的势能相等。
即 T max = V max 其中 2max 2v m T = , 2max 21kA V =v km A =吊索中的最大张力 mk v mg kA mg F +=+=max 代入数据得 kN 7.461040020058.92003max =⋅⋅+⋅=F4-5 质量为m 的小车在斜面上自高度h 处滑下,而与缓冲器相碰,如图所示。
缓冲弹簧的刚性系数为k ,斜面倾角为θ。
理论力学 第四章
(m
(m
2J r
2
) x kxx 0 x
) kx 0 x
2J r
2
--自由振动微分方程
系统的固有频率为
0
k r2 mr 2 2 J
§ 4-2 计算固有频率的能量法
如图所示无阻尼振动系统
当系统作自由振动时,运动规律为
x A sin(0t )
2
2
当圆柱体作微振动时, 可认为 sin
2
2
1 V mg ( R r ) 2 2
设系统作自由振动时θ的变化规律为 A sin(0 t )
3m 2 ( R r ) 2 0 A 2 则系统的最大动能 Tmax 4 1 2 系统的最大势能 Vmax mg ( R r ) A 2 由机械守恒定律 有 Tmax Vmax
2 0
k m
0
k m
0 只与表征系统本身特性的质量m和刚度k有关
而与运动的初始条件无关
它是振动系统固有的特性
所以称为固有角(圆)频率(一般也称固有频率) m=P/g
k P / st
0
g
0
k m
st
(2)振幅与初相角
x A sin( 0 t )
速度为
dx v 0 A cos(0t ) dt
在瞬时t 物块的动能为
1 2 1 2 T mv m0 A2 cos2 (0t ) 2 2
若选平衡位置为零势能点,有
1 2 V k[( x st ) 2 st ] Px 2
k st P
1 2 1 2 V kx kA sin 2 (0 t ) 2 2
振动力学基础
k1 = k2 = 2k0
k0 4k0 ϖ= =ϖ0 ϖ = = 2ϖ 0 m m
例. 质量为m的比重计,放在密度为 ρ 的液体中。已知比 重计圆管的直径为d。试证明,比重计推动后,在竖直方向 的运动为简谐振动,并计算周期。 解: 取平衡位置为坐标原点 平衡时: mg 浮力:
−F =0
F
F = ρ Vg
o
2
2
d πρg ω= 2 m
x
x
k的轻弹簧、一 例.如图所示,振动系统由一倔强系数为 如图所示,振动系统由一倔强系数为k 半径为 R、转动惯量为 J的定滑轮和一质量为 m的物体所 半径为R 转动惯量为J 的定滑轮和一质量为m 组成。使物体略偏离平衡位置后放手,任其振动,试证 物体作简谐振动 . 物体作简谐振动. 解:取位移轴 ox , 解:取位移轴ox ox, m的平衡位 原点在 原点在m m在平衡位置 置。 置。m 时,设弹簧伸长量 : 为∆l,则有 ,则有:
x1
x2
1 1 1 2 2 2 m1v1 + m2 v2 + kx = c 2 2 2
m1v1 + m2v2 = 0 x = x2 − x1 − l
dv1 dv2 dx m1v1 + m2 v2 + kx =0 dt dt dt
d ( x2 − x1 −l) dv1 dv2 mv +mv +k ( x2 − x1 −l) =0 11 11 dt dt dt dv1 dv2 k − + ( x2 −x1 −l)( v2 −v1) =0 dt dt m v1
o
其中 V 为比重计的排水体积
mg
2 ⎡ ⎤ d x ⎛d ⎞ mg − ⎢V + π ⎜ ⎟ x ⎥ ρ g = m 2 2 d t ⎝ ⎠ ⎢ ⎥ ⎣ ⎦ 2 2 d x ⎛d ⎞ mg − ρ Vg − ρ gπ ⎜ ⎟ x = m 2 dt ⎝2⎠
《机械振动》张义民—第4章第1、2节ppt
◆当振动系统需要两个独立坐标描述其运动时, 那么这个系统就是两个自由度系统。
◆两自由度系统是最简单的多自由度系统。 ◆两自由度系统的振动微分方程一般由两个联立 的微分方程组成。 ◆两自由度系统有两个固有频率及固有振型。
◆在任意初始条件下的自由振动一般由这两个固 有振型叠加,只有在特殊的初始条件下系统才按某 一个固有频率作固有振动。
大象体积庞大,走起路来 更是别具一格,四只脚移动 时分别各自相差90度的位移 差。没有一只脚做的是相同 位移的移动。
◆四只脚动物可以看作是“四个振动体耦合在一起的 系统”吗?事实上,四个振动体组成的系统的基本运动 模式,确实与所提到的那四种走路方式一模一样。
◆可是动物们为什么会按照耦合振动体的方式来行走 呢?虽说现在关于这个问题还没有定论。生物学家们认 为,掌管运动的脑神经网(由数突连接起来的神经细胞) 看起来更接近“耦合振动体”一些。有推测认为,正是 脑神经网的动力学特性,使得动物走起路来才会表现出 振动体的特点。
1998年匈牙利的物理学家塔 马斯·维塞克在布达佩斯音乐学 院举行的一场音乐会上意外地发 现了同步化的现象。
演出相当成功,落幕后观众们热烈的掌声长达 3分钟之久,而维塞克博士便在这里发现了有趣 的东西。音乐会刚一结束,观众们雷鸣暴雨般的 掌声响起,然而过了一段时间之后,观众们的热 烈的掌声显然同步化了,变成了同一种节奏的拍 手。为了答谢观众们的热情,演奏者重新走上台 来谢幕,这时的掌声又突然之间失去了刚才的节 奏,雨点般疯狂地响起。在最后长达3分钟的鼓 掌声中,狂热的掌声和同步的掌声依次交替出现。
◆强迫简谐振动发生在激励频率,而这两个坐标 的振幅将在这两个固有频率下趋向最大值。共振时 的振型就是与固有频率相应的固有振型。
振动力学4.4

n值取决于精度要求,n越多精度越高,但同时也带来计算量 越大,i (x)
i 1,2,...,n 是系统的实际模态函数,计算时以假设
模态近似,满足部分或全部边界条件,n越大, i (x) 越接近真实
的模态,解的精度越高。 用假设模态法可以建立由有限个广义坐标表示的动力学方程。
二、广义坐标的动力学方程
d L L Qi dt qi qi
i 1,2,...,n
1 1 T l 1 T 1 T q Mq qT Kq q Mq q Kq 0 f ( x, t )i ( x)dx F (t )i ( xc ) 2 2 2 qi 2
对于有集中质量和弹性支承的情况有
1 l 1 T l ( x) 2 ( x)dx m 2 ( xb ) 2 0 2
*
Vmax
2 1 l 1 1 2 ' ( xb ) k2 2 ( xa ) EI ( x) "( x) dx k1 2 2 0 2
j
k ij q j Qi
i 1,2,...,n
矩阵形式
Mq Kq Q
方程显然与集中质量法求法(解法)不同,
结果形式相同,即都离散为一个有限自由度系统。
例题:
变截面圆轴一端自由,一端固定,如图截面的极惯性
矩 I ( x) I 0 (1 x ) ,求轴扭转振动的前两阶固有频率。
1 a (1) 0.0681
0.1995 a ( 2) 1
( x) a T
x
2l 3x 2l
1 2
3x 1 ( x) sin 0.0681 sin 2l 2l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
]
[u]T
[m][u]
2mL2 0
0
2mL2
[K
]
[u]T
[k
][u]
2mgL 0 0 2mgL
运动方程已解耦。
2020年8月6日 20
《振动力学》
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
{x(t)} [u]{(t)}
代入运动方程,则有:
[m][u 2020年8月6日 ]{} [k ][u]{} {P(t)} 17 《振动力学》
4.3 线性变换与坐标耦合
左乘 [u]T
[u]T [m][u]{}[u]T [k][u]{} [u]T {P(t)}
记 [M ] [u]T [m][u] [K ] [u]T [k][u] {N (t)} [u]T {P(t)}
其中,[m],[c],[k]为n维矩阵,分别为质量矩阵,阻尼矩
阵和刚度矩阵。
其中,刚度矩阵为:
2020年8月6日 《振动力学》
k11...k1 j ...k1n
[k
]
k21...k2
j
...k2
n
.....................
kn1...knj ...knn
5
4.2 线性系统的运动方程及其矩阵表达式
k3
x2
P2
(t)
0 0 m3 x3 0
k3
k3 k4 x3 P3(t)
矩阵形式为:
2020年8月6日 [m]{x} [k]{x} {P(t)} 15 《振动力学》
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
因此,只有两个坐标独立。
L2
2
m2
y
(x2 , y2 )
能完备的描述系统运动的一组独立的坐标叫广义坐标。
本例202中0年8,月6可日 选(x1, x2 ) 作为广义坐标。 3
本例《振中动力,学》也可选(θ1,θ2 ) 作为广义坐标。
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
例如: k12 k2
k13 0
3.刚度矩阵为对称矩阵。
例如: k12 k21
k1
k2
k3
kn
m1
m2
m3
mn
c12020年8月6日 c2
c3
cn
7
《振动力学》
4.2 线性系统的运动方程及其矩阵表达式
4.阻尼矩阵和刚度矩阵规律相同。
例如: c22 c2 c3
c23 c3
5.取系统质心为坐标原点,则质量矩阵为对角矩阵。
(2 ) kij 2mij 0
本式称为系统的频率方程,该行列式叫特征行列式。
2020年8月6日 25
《振动力学》
4.4 无阻尼自由振动,特征值问题
展开的频率方程为:
k11 2m11 k21 2m21
k12 2m12 k22 2m22
k1n 2m1n k2n 2m2n 0
kn1 2mn1 kn2 2mn2
第四章
多自由度系统振动的基本知识
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
2020年8月6日 2
《振动力学》
4.1 广义坐标
4.1 广义坐标
先看一个例子
图示双摆,质量m1, m2在平面摆动。
可以取四个直角坐标 (x1, y1) (x2 , y2 ) 来描述系统的运动。 但这四个直角坐标不独立,有:
x 1
L1
m1 (x1, y1 )
x12 + y12 = L12 (x2 - x1)2 + ( y2 - y1)2 = L22
n
n
{x(t)} Cr{x(t)(r)} Cr{u(r)}cos(rt r )
r 1
r 1
2020年8月6日 27
《振动力学》
4.4 无阻尼自由振动,特征值问题
例: 求图示系统的自然频率。
x1
x2
2k m
k
k
m
x3
2k m
解:系统的质量矩阵为
m 0 0
[m]
0
m
0
系统的刚度矩阵为 0 0 m
10
4.2 线性系统的运动方程及其矩阵表达式
P1(t)
x1 P2(t)
x2
k1
k2
k3
m1
m2
刚度矩阵为:
[k
]
k1 k2
k2
k2
k2
k3
激励向量为:
2020年8月6日
{P(t
)}
P1(t) P2 (t)
11
《振动力学》
4.2 线性系统的运动方程及其矩阵表达式
例2: 直接写出图示系统的刚度矩阵。
刚度矩阵 [k] 中的元素 kij 是使系统仅在第 j 个坐标上产 生
单位位移而相应于第 i 个坐标上所需施加的力
kij
Qi
qj qr
1 0(r
1, 2..., n, r
j)
例如
Q1
k11 Q1 k1 k2
k1 1
m1
k21 Q2 k2
k1
k2
m1
m2
c12020年8月6日 c2
《振动力学》
knn 2mnn
n 阶方阵 A 正定 A >0
是指对于任意的 n 维列向量 y,总有 yT Ay 0 成立
并且等号仅在 y 0 时才成立
若系统的质量矩阵和刚度矩阵正定,则有频率方程可解得 n个
正实根:
1 2 ... n
2最020小年8的月6日 称为基频。
《振动力学》 1
i 称为第i阶自然频率。
j 1, 2..., n
其中,u j ( j 1, 2..., n) 是一组常数。
即为同步振动: xj (t) u j =const xi (t) ui
i, j 1, 2..., n
同20步20年振8月动6日:系统在各个坐标上除了运动幅值不相同外,随时
间《变振动化力学的》规律都相同的运动
22
4.4无阻尼自由振动,特征值问题
三自由度系统
振动形式1
振动形式2
振动形式3
同步振动:系统在各个坐标上除了运动幅值不相同外,随时 间变化的规律都相同的运动
2020年8月6日 23
《振动力学》
4.4 无阻尼自由振动,特征值问题
将同步解代入运动方程:
n
n
f (t) miju j f (t) kiju j 0
j 1
j 1
i 1, 2..., n
k3
0
k3
k3 k4
2020年8月6日 14
《振动力学》
4.2 线性系统的运动方程及其矩阵表达式
k5
P2(t)
k6
k1
P1(t) k2 m2
k3
P3(t) k4
m1
m3
系统的运动方程为:
m1 0 0 x1 k1 k2
k2
0 x1 P1(t)
ቤተ መጻሕፍቲ ባይዱ
0
m2
0
x2
k2
k2 k3 k5 k6
2020年8月6日 21
《振动力学》
4.4 无阻尼自由振动,特征值问题
4.4 阻尼自由振动,特征值问题
无阻尼系统的运动方程:
[m]{x(t)}[k]{x(t)} {0}
一般形式为:
n
n
mij x j (t) kij x j (t) 0
j 1
j 1
i 1, 2..., n
设其有同步解: x j (t) u j f (t)
12
0 0
若有线性变换:
{
(t)}
1 1
11{(t)}
计算变换以后的质量矩阵和刚度矩阵。
解:
mL2 0
[m] 0
mL2
mgL ka2 ka2
[k
]
ka
2
mgL
ka2
2020年8月6日 19
《振动力学》
4.3 线性变换与坐标耦合
[u]
1 1
1 1
[u]T
1 1
1 1
则:
[M
2020年8月6日 9
《振动力学》
4.2 线性系统的运动方程及其矩阵表达式
P1(t)
x1 P2(t)
x2
k1
k2
k3
m1
m2
直接写出矩阵形式的运动微分方程:
[m]{x}[k]{x} {P(t)}
其中,质量矩阵为:
[m]
m1 0
0
m2
位移向量为:
2020年8月6日 《振动力学》
{x}
x1(t) x2 (t)
3k k 0
[k] k
2k
k
2020年8月6日
0 k 3k
28