振动力学第二章课件
第2章振动与波
6
第2章振动与波
与振动相关的概念
振荡 振荡是一种物理量在观测时间内,不断地 经过最大值和最小值而变化的过程。
振动 振动是指物理量是一个机械系统的运动参 量时的振荡。主要是指机械运动。
7
第2章振动与波
与振动相关的概念
弹簧振子
k
弹性力 f 与拉伸长度 x 的关系为 f kx
振子在获得这种外部来的能量后就开始振 动,将其转化为振动能。
cm
1 k
为力顺,它反映弹簧的柔顺程度
根据牛顿第二运动定律
所以
f= ma
d2x m dt 2 kx
质点自由振动方程
d2x dt 2
02
x
0
其中
02
k m
21
第2章振动与波
d2x dt 2
02
x
0
二阶齐次方程
22
第2章振动与波
声学基础
0T 2
第二章 振动与波
2π秒钟的振动次数
0 2 f
自由振动的一般规律
f0
1
2
1 mCm
数k越小,固有频率 越低。
25
第2章振动与波
思考
若需要降低动圈扬声器的固有频率,应采 取什么措施?
①增加系统的质量,即增加音圈与纸盆的 质量
②减小系统的弹性系数,即使纸盆边缘的 折环部分更为柔顺。
26
第2章振动与波
声学基础
第二章 振动与波
例:扬声器力学振动系统在低频时可视为集中参数系统,
3
第2章振动与波
声音是一种波动现象。当声源(机械振 动源)振动时,振动体对周围相邻媒质产 生扰动,而被扰动的媒质又会对它的外围 相邻媒质产生扰动,这种扰动的不断传递 就是声音产生与传播的基本机理。
西南交通大学振动力学_第 2 章(II) 单自由度系统的强迫振动
F0 0 (sin t sin t ) 0 2 k (1 )
(2 48)
可见:1)强迫振动即使在初位移和初速度均为零,在
激振力作用下仍存在着瞬态响应,即上式等号右端括号
中的第二项,在有阻尼的情况下,此项数值将逐渐趋向 于零。 2 )当系统的固有频率比较低时,瞬态振动振幅 就可能比较大,而且在较长时间内不易衰减下去。 3 )因此实验中测定强迫振动振幅时,应该在经 过一段时间稳定以后再测量,否则可能测到的是两部分
《振动力学》
自由振动
B
F0 / k
(1 2 ) 2 (2 ) 2
0 x 0 2 x 0 2 ) x 18 ' ' x0 arctan 0 x0 x A (
单自由度系统的振动 d) 激振力频率0等于或接近于自由振动频率情形 引入ω –ω0 =2ε 考虑式(2-48),当 ε 很小时,则 F sin t x 0 cos t (2 50) 2 m 式(2-50)中ε很小,sinεt变化缓慢,周期2π/ε很大。式(2-50) 可看成周期为 2π/、可变振幅等于 ( F0 / 2 m )sin t 的振动。这种现 象称为拍,按图2-32中规律变化。拍的周期为π/ ε。
F0 sin 0t x(t ) A sin(t ) k 1 2 (2 47)
0 ,代入初始条件得 设t=0时,x 0, x
F0 0 A , 0 k (1 2 )
图 2-31
《振动力学》
16
单自由度系统的振动
代入(2-47)得
x(t )
当阻尼大时,带宽就宽,过共振时振幅变化平缓,振幅较小;反之, 阻尼小时,带宽就窄,过共振时振幅变化较陡,振幅就大。所以品质因子 反映了系统阻尼强弱性质和共振峰的陡峭程度。在机械系统中,为了过共 振时比较平稳,希望 Q值小些。式(2-45)提供了由试验估算系统阻尼比 的方法。 半功率点q1和q2 处的相位角由式(2-40) 估算如下: 21 2 (1 ) tan 1 1 2 2 1 1 1 (1 )
振动力学 第二章 两自由度系统.

显然,方程组 (3.2) 中的两个方程相互关联的。因为第x 2 (t ) ,第二式中包含了 x 1 (t ) 和 x 1 (t ) 。 我们这里把由联立的方程所表示的系统运动称为是“耦合” 耦合项分别为 、 c2 x 2 (t )
k2、 x2 (t ) c2、 x1 (t ) k2 。 x1 (t )
而常数 u1 和 u2 表示位移的幅值。
x2(t) u2 f (t)
(3.8)
其中, f (t ) 表示两个位移 x1(t) 和 x2 (t) 对时间的依赖部分,
将假设的同步解(3.8)式代入运动微分方程组(3.7),得:
m1u1 f (t ) k11u1 k12u2 f (t ) 0 m2u2 f (t ) k12u1 k 22u2 f (t ) 0
k1 1 m1 u1 k1 2u 2 0 k1 2u1 k 2 2 m 2 u 2 0
将 2 代入上式,写出:
k m u k u 0 k u k m u 0
11 2 1 1 12 2 12 1 22 2 2 2
而如果方程(3.9)有解,则需有:
(3.9)
f (t) k11u1 k12u2 k12u1 k 22u2 f (t) m1u1 m2u2
(3.10)
f (t) k11u1 k12u2 k12u1 k 22u2 f (t) m1u1 m2u2
因为上式右端各量均为实常数,所以 只要由方程(3.10)所确定的两个方程:
则解(3.16)成为:
2
(3.17)
it f (t) Ae A2e it 1
(3.18)
江苏专用_新教材高中物理第二章机械振动2简谐运动的描述课件新人教版选择性必修第一册

解析:1 s 时质点位于正向最大位移处,3 s 时质点处于负向最大位移处, 位移方向相反,故 A 错误;一个周期内质点做简谐运动经过的路程是 4A=8 cm,10 s 为 2.5 个周期,则质点经过的路程为 20 cm,故 B 正确;由题图知 位移与时间的关系为 x=Asin(ωt+φ0)=0.02sinπ2tm,当 t=5 s 时,其相位 ωt +φ0=π2×5=52π,故 C 错误;在 1.5 s 和 4.5 s 两时刻,质点位移相同,x =Asin 135°= 22A= 2 cm,故 D 错误。 答案:B
提示:(1)时间 t=T,路程 s=4A,位移 x=0。 (2)时间 t=21T,路程 s=2A,位移 x=2A。 (3)两个过程的各量都相同:时间 t=14T,路程 s=A,位移 x=A。 (4)D→C→D 过程:时间 t=14T,路程 s<A,位移 x=0。 D→O→E 过程:时间 t=14T,路程 s>A,位移 x=0。
D.B 的相位始终超前 A 的相位π3
解析:振幅是标量,A、B 的振幅分别是 3 m、5 m,A 错;A、B 的圆频率 ω= 100 rad/s,周期 T=2ωπ=120π0 s=6.28×10-2 s,B 错,C 对;Δφ=φA0-φB0 =π2-π6=π3为定值,A 的相位超前,B 的相位π3,D 错。 答案:C
( √)
2.物体 A 做简谐运动的振动位移 xA=3sin100t+π2m,物体 B 做简谐运动的振
动位移 xB=5sin100t+π6m。比较 A、B 的运动 A.振幅是矢量,A 的振幅是 6 m,B 的振幅是 10 m
()
B.周期是标量,A、B 周期相等,为 100 s
C.A 振动的圆频率 ωA 等于 B 振动的圆频率 ωB
2.2无阻尼的自由振动和振型 振动力学课件

2 M A K A 0 (广义本征值问题)
A 有非零解的充要条件是 K 2 M 0
(系数行列式等于零)
k11 2m11 即 k21 2m21
...
kn1 2mn1
k12 2m12 k22 2m22
...
kn2 2mn2
... k1n 2m1n
利用 Kronecker 符号:
φ(i)T Mφ( j) ij mpi
φ(i
)T
Kφ( j)
ij k pi
ij
1 0
i j i j
第i 阶固有频率:
i
k pi m pi
φ(i)T Kφ( j) i2φ(i)T Mφ( j)
(i 1n)
五、正则模态(简正模态)φN(i)
定义:全部主质量皆为1的主模态 mpi φN(i)T MφN(i) 1
M ,K
12((11))
(2) 1
(2) 2
... ...
... ...
1(
( 2
n) n)
... ... ... ... ...
n(1)1
(2) n1
...
...
(n) n1
1 1 ... ... 1
系统的模态矩阵或模态是各本(特)征值(固有频率) 所对应的本征向量(固有振型)组成的。
结论:系统的固有频率和模态完全由系统的物理参数
M确, 定K ,是系统的固有特性。
例题2-1:
汽车振动简化模型如图,已知汽车质量为m,对质心转
动惯量为J,刚度系数分别为
点的距离
OC a
,k1, 长k2 度尺寸
,重l1,心l2 到O
振动力学与结构动力学第二章21PPT课件
k2
12 EI h3
,
k 28 .284 rad / s, m
f 1 4 10 6 4 .502 Hz
2 5000
-
5
求图示系统的固有频率 (a)弹簧串联情况; (b)弹簧并联情况。
(a)串联情况
k1 yst1 k2 yst 2 mg ,
y st
yst1
yst 2
mg k1
mg k2
arctg(y0/ y0)
-
1
其通解为 y(t) c 1cot sc 2sitn 令 y0 Asinv
由初始条件 y(0)y0
y0/Acovs
y(0) y0
y(t)A si n t (v)
可得 c1 y0 c2 y0 /
y(t)y0cots y0si nt
其中
A
y02
y02
2
tan
y0
y0
mg ( k1 k2 ), k1k 2
k mg k1k2 , yst k1 k2
k1k 2
m(k1 k2 )
思考题:串联后系统频率与单 个弹簧系统相比有何变化?
-
6
(b) 并联情况
y st 1 y st 2 y st ,
k 1 y st 1 k 2 y st 2 mg ,
y st
mg k1
, k2
k k1 k2,
k1 k2 m
思考题:并联后系统频率与 单个弹簧系统相比有何变化?
-
7
例:简支梁AB,重量不计。在梁的中点位置放一重为W 的物体M时,其静挠度为yst。现将物体M从高度h处自由
释放,落到梁的中点处,求该系统振动的规律。
当物体落到梁上后,梁、物体系统作简谐振动,只要定 出简谐振动的三个参数:圆频率、振幅和初相角即可。
第二章 1 《简谐运动》课件ppt
的坐标来表示。
(2)简谐运动的速度
①物理含义:速度是描述振子在平衡位置附近振动快慢的物理量。在所建立的
坐标轴上,速度的正、负号表示振子运动方向与坐标轴的正方向相同或相反。
②特点:振子在平衡位置速度最大,在两最大位移处速度为零。
(3)加速度
一薄板连接,薄板的质量不计,板上放一重物.用手将重物往
下压,然后突然将手撤去,则重物被弹离之前的运动情况是
加速度先________后________.
【答案】减小
增大
【解析】竖直方向的弹簧振子的振动也是简谐运动,但它的平衡位
置在重力与弹力平衡的位置,此位置加速度为零.因此从平衡位置将弹
簧压缩以后放手,它的加速度是先减小,到达平衡位置以后再增大.
[典例剖析]
例题2(2021新疆实验中学高二期末)如图所示为一质点的简谐运动图像。
由图可知,下列说法正确的是(
)
A.质点的运动轨迹为正弦曲线
B.t=0时,质点正通过平衡位置向正方向运动
C.t=0.25 s时,质点的速度方向与位移的正方向相反
D.质点运动过程中,两端点间的距离为0.1 m
解析 质点做简谐振动时,运动轨迹是一条直线,离开平衡位置的位移与时
物体的位移和加速度的方向是一定的,而速度的方向却有两种可能。
[典例剖析]
例题1(多选)弹簧上端固定在O点,下端连接一小球,组成一个振动系统,如
图所示,用手向下拉一小段距离后释放小球,小球便上下振动起来,关于小
球的平衡位置,下列说法正确的是(
A.在小球运动的最低点
)
B.在弹簧处于原长时的位置
C.在小球速度最大时的位置 D.在小球原来静止时的位置
梁的弯曲振动-振动力学课件
常见的约束状况与边界条件
1. 固定端条件(位移边界) 挠度和转角等于零
y(x,t) 0 y '(x,t) 0
(x) 0
'(x) 0 x 0,l
2. 简支端(铰支)(位移、力混界)
挠度和弯矩等于零
y(x,t) 0 M (x,t) 0
(x) 0
EIy"(x) 0
伯努利-欧拉梁(Bernoulli-Euler Beam)
y x,t 距原点 x处的截面在 t 时刻的横向位移
微段受力分析
FS , M 截面上的剪力和弯矩
l
(
x)
2 t
y
2
微段的惯性力
f x,t 微段所受的外力
l
(
x)
2 t
y
2
动力平衡关系由达朗贝尔原理得
l (x)
2 y t 2
dx
Fs
解:固定端:(0) 0 '(0) 0
自由端: 弯矩为零,剪力与质量惯性力平衡
EI "(l) 0 EIl m02 l
利用相同的方法,得频率方程:
cos lchl 1 l sin lcoshl cos l sinh l
其中: m0 为集中质量与梁质量之比
m m Sl 为梁质量
说明:
以上分析中没有考虑剪切变形和截面转动惯量的影响, 因此以上有关梁的分析只适用于细长梁(梁的长度大于梁 高度5倍以上) 若梁为非细长梁,必须考虑剪切变形和截面转动惯量的影响
Fs
Fs x
dx
f
( x, t )dx
l
(
x)
2 t
y
2
Fs x
f (x,t)
高中物理第二章机械振动2简谐运动的描述课件新人教版选择性必修第一册
1 12
T,所以振子经过的路程为 4A+2A=6A=60 cm,C 正确;从 O 开始经过
3 s,振子处在最大位移处(A 或 B),D 错误。
【加固训练】
一个质点做简谐运动,振幅是 4 cm,频率为 2.5 Hz,该质点从平衡位置起向正方
向运动,经 2.5 s,质点的位移和路程分别是( )
A.4 cm、24 cm
类似于O→B→O→C→O的一个完整振动过程。
(2)周期和频率
全振动
秒 振动快慢
1 f
全振动 振动快慢
3.相位 (1)物理意义:相位是表示物体_振__动__步__调__的物理量。 (2)定义:用相位来描述简谐运动在一个全振动中所处的_阶__段__,用_φ__表示。
二、简谐运动的表达式 【情境思考】
知识点二 对简谐运动表达式的理解 角度 1 由表达式求物理量 1.简谐运动的表达式 x=A sin (ωt+φ)中各物理量的意义: (1)x:表示振动质点相对于平衡位置的位移。 (2)A:表示振幅,描述简谐运动振动的强弱。 (3)ω:圆频率,它与周期、频率的关系为 ω=2Tπ =2πf。可见 ω、T、f 相当于一 个量,描述的都是振动的快慢。
②若 Δφ=φ2-φ1>0,则称 B 的相位比 A 的相位超前 Δφ 或 A 的相位比 B 的相位 落后 Δφ;若 Δφ=φ2-φ1<0,则称 B 的相位比 A 的相位落后|Δφ|或 A 的相位比 B 的相位超前|Δφ|。
如图所示,一位游客在千岛湖边欲乘坐游船,当日风浪很大,游船上下浮动。可 把游船浮动简化成竖直方向的简谐运动,振幅为 20 cm,周期为 3.0 s。当船上升 到最高点时,甲板刚好与码头地面平齐。地面与甲板的高度差不超过 10 cm 时, 游客能舒服地登船。则在一个周期内,游客能舒服地登船的时间是多少?
振动力学 第2章
第二章 受迫振动2.1 图E2.1所示系统中,已知m ,c ,1k ,2k ,0F 和ω。
求系统动力学方程和稳态响应。
解:动力学方程为 2211()()0iiiii i mxc xx k x x ==+-+-=∑∑ 将sin i i i x A t ω=代入上面的方程得212121()()(sin cos )i i i i i i i i mxc c x k k x k A t c A t ωωω=++++=+∑ 化成标准形式 22n n12(sin cos )i i i i i i i i k A c Ax x x t t m mωξωωωω=++=+∑2222n nn n112122(sin cos )i i i i i i i i k A c A x x x t t k k k k ωωωξωωωω=++=+++∑其中,n ω=ζ=依据叠加原理,其稳态响应为211212sin()cos()i i i i ii i i i i k A c A x t t k k k k ωωϕωϕ=⎡⎤=-+-⎥++⎦其中,22arctan 1i i i s s ζϕ⎛⎫= ⎪-⎝⎭,n /ii s ωω= 简化后得] 2112122121sin()cos()sin()cos())i i i i ii i i iii i i i i i iii i iik A c Ax t tk k k kk t c ttωωϕωϕωϕωωϕωϕθ===⎡⎤=-+-⎥++⎦=-+-=-+=21sin()i i i iitωϕθ=-+其中,arctan i iiickωθ⎛⎫= ⎪⎝⎭2.2解:设质点的位移为x,两个弹簧连接处的位移为y,则有2021()sin()mx k x y F tk x y k y cyω+-=⎧⎨-=+⎩由第一式解得022sinFmxy x tk kω=+-代入第二式并整理有:01201212222()sin cosF k k F ck kcmx mx cx k x t tk k k kωωω+++++=+令其稳态解为:sin cosx C t D tωω=+代入上面的方程整理,得到32012121222320121222()sincos0F k kk kcmD m C c D k C tk k kF ck kcmC mD c C k D tk k kωωωωωωωωω⎛⎫++--+-⎪⎝⎭⎛⎫++--++-=⎪⎝⎭由于分别令sin tω和cos tω均不可能恒等于零,故其系数应等于零,即32012121222320121222()F k kk kcmD m C c D k Ck k kF ck kcmC mD c C k Dk k kωωωωωωω++⎧--+-=⎪⎪⎨+⎪--++-=⎪⎩也即()()()()221212201222212120()()()k k k k m C c k m D F k kc k m C k k k k m D F cωωωωωωω⎧-+--=+⎪⎨-+-+=⎪⎩解得()()22221212122022222221212()()()k k k k k k m c k m C F c k m k k k k m ωωωωωω⎡⎤+-++-⎣⎦=⎡⎤-+-+⎣⎦()22022222221212()k c D F c k m k k k k m ωωωω-=⎡⎤-+-+⎣⎦2.3解:我们知道,阻尼线性系统受简谐激励时的稳态响应为滞后于激励力的同频率简谐振动,故可设稳态解为:cos()x A t ωθ=-激励力和阻尼力的表达式分别可以写为e 0cos F F t ω=,d sin()F cxc A t ωωθ=-=- 稳态振动时,一个周期内外力所做的功应当等于阻尼力损耗的功[]2/e 0002/002/002/00200cos d cos ()sin()d ()cos sin()d ()cos()sin()d ()cos()cos sin()sin sin()d ()cos cos()sin()d W F t x F t A t tAF t t t AF t t tAF t t t tAF t t t πωπωπωπωωωωωθωωωθωωθθωθωωθθωθθωθωθωθωθ==⋅--=-⋅-=--+⋅-=----⋅-=---⎰⎰⎰⎰⎰/2/20022/2/000000()sin sin ()d 111()cos sin ()()sin sin 2()2240sin sin AF t tAF t AF t t AF F A πωπωπωπωωθωθωθωθωθωθωωπωθπθω---⎡⎤=-⋅-----⎢⎥⎣⎦⎡⎤=+=⎢⎥⎣⎦⎰⎰2/2/2222d 0222/222d d ()sin ()d 11()sin 2()()24W cxx cxt c A t tc A t t c A c A πωπωπωωωθπωωθωπωωω===-⎡⎤⎡⎤=--==⎢⎥⎢⎥⎣⎦⎣⎦⎰⎰⎰令 e d W W =,有20sin F A c A πθπω=即0sin F c A θω= (1)另一方面,考虑质点从静力平衡位置运动到振幅最大时这四分之一周期的能量关系,有/2/2222e d 0011d d 22m A F x F x kA πωπωω+-=⎰⎰ (2)注意,既然稳态之后位移总是滞后激励力一个相位θ,不妨认为d 0cos ,cos()x A t F F t ωωθ==+ 于是,/2/2/2e 000/2/2000/200/2000d cos()d cos()d cos()sin d (cos cos sin sin )sin d (cos cos sin sin )sin d cos cos sin d sin sin F x F t x F t xt F A t t t F A t t t tF A t t t tF A t t t F A πωπωπωπωπωπωπωωθωθωωθωωθωθωωωθωθωωωθωωωθ=+=+=-+=--=--=-+⎰⎰⎰⎰⎰⎰⎰ /22000d 11cos sin 24t tF A F A πωωθπθ=-+⎰/2/2/222222d 01d d sin td 4F x cxt c A t c A πωπωπωωωπω===⎰⎰⎰代入(2)式得22220011111cos sin 22442m A F A F A c A kA ωθπθπω-+-= 利用(1)式并代入上式有20()cos k m A F ωθ-=- (3)由(1)式和(3)式联立解得02,arctanc A k m ωθω==-2.4在图E2.4所示系统中,已知m ,1k ,2k ,0F 和ω,初始时物块静止且两弹簧均为原长。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I 0 kn
其中 I 0 —— 圆盘对中心轴的转动惯量
k n —— 圆轴的抗扭弹簧常数
固有频率 则
pn kn I0
2 n
kn
I0
0 sin pnt
图2-4 扭振系统
p 0
0 cos pnt
pn
扭振系统的振动微分方程与单自由度弹簧质量振动系统的微 分方程的形式完全相同,它们的振动特性也完全相同。因此 归为单自由度弹簧质量振动系统进行讨论。
k k1 k2
5
太原科技大学应用科学学院
第二章 单自由度系统的振动
2、 串联弹簧
( st )1 ( st ) 2 st
F1 F2 mg
k1
F1 k1 ( st )1 F2 k2 ( st ) 2
( st )1 mg mg ( st ) 2
k1 k2
x0 x x0 cos pnt sin pnt 或x A sin( p t ) n pn
An p x arctg( n 0 ) x0 2 x0 x 2 pn
2 0
3
太原科技大学应用科学学院
第二章 单自由度系统的振动
二、 周期、频率和圆频率(只与系统本身有关)
太原科技大学应用科学学院
第二章 单自由度系统的振动
1 T I B 2 2 1 2 2 V kb 2
d (V T ) 0 dt
1 1 2 I B 2k b2 0 2 2
k b2 0 IB
pn
kb 2 IB
习题2-1 2-3 2-5 2-6
§2-4 有阻尼系统的衰减振动 干摩擦:与压力成正比 (库仑阻尼) 外阻尼
粘性阻尼: R cu cx (c为粘性阻尼系数)
流体动力阻尼: R bx 2
阻尼
内阻尼 材料非弹性阻尼 迟滞圈的面积表示单位体积在 一个振动循环中所逸散的能量 结构的非弹性阻尼:比材料阻尼大许多但 一并合入材料阻尼讨论
pn cos( pnt )
1 1 2 2 Tmax I Bmax I B 2 pn 2 2 取平衡位置为系统的势能零点,则
其中
14
k
B
C
D
P
l
b
图2-5 船舶振动记录仪示意图
1 2 2 V k st b st Pl 2
4
太原科技大学应用科学学院
第二章 单自由度系统的振动
1 、并联弹簧
( st )1 ( st )2 st
F1 F2 mg
F1 k1 ( st )1 k1 st
k1
k2
l
F1 F2
m
m
F2 k 2 ( st ) 2 k2 st
st
mg
m
mg k st
1
太原科技大学应用科学学院
第二章 单自由度系统的振动
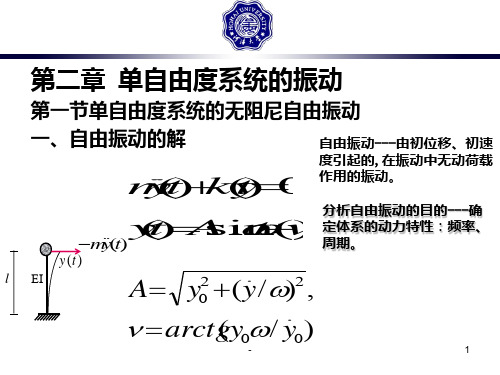
§2-1 无阻尼系统的自由振动
弹簧-质量系统 一 、自由振动方程 A 取静平衡位置为坐标原点,方向如图2-1 l k mg k ( sk x) mx B mg k sk st . o kx 0 mx F x 取静平衡位置为坐标原点时,重力和 静变形不出现在振动方程中。 mg 常取静平衡位置为坐标原点,不考虑 x 重力和静变形的影响。 图2-1 单自由度振动系统 令
Pl k st b
太原科技大学应用科学学院
第二章 单自由度系统的振动
1 2 2 V kb 2
Vmax 1 2 2 kb 2
常取静平衡位置为坐 标原点,不考虑重力 和静变形的影响
1 1 2 2 2 2 I B pn kb 2 2
pn kb 2 IB
15
11
太原科技大学应用科学学院
第二章 单自由度系统的振动
设 me 为广义质量, k n 为广义弹簧常数,q 为广义坐标,则 单自由度系统的自由振动微分方程的典型形式为
2 q pn q 0
pn
并联弹簧
kn m
kn kn1 kn 2
串联弹簧
kn1kn 2 kn kn1 kn 2
太原科技大学应用科学学院
第二章 单自由度系统的振动
例2-1 一个质量为m的物体从h的高出落下,与抗弯刚度为EJ, 长为l的简支梁做塑性碰撞,不计梁的质量,求该系统自由振动 的频率、振幅和最大挠度。
解:质量为m的物体放于简支梁的 中点时,梁中点处的静挠度为
mgl 3 st 48EJ
h x
F
t A st 1 1 st
mgl 3 48 EJ 96 EJh 1 1 mgl 3
太原科技大学应用科学学院
9
第二章 单自由度系统的振动
例2-2质量为m的物块悬挂如图2-3,设 AB杆质量不计,两弹簧的弹簧常数为k1 和 k2 ,求物块的自由振动频率。 解:
第二章 单自由度系统的振动
目的及基本要求 目的在于介绍单自由度系统的自由振动 阻尼振动和受迫振 动以及响应谱和用能量法计算固有频率。要求学生通过单自由 振动了解振动的一些基本特征,并能求解基本振动问题,为研 究复杂振动系统奠定一定基础。 重点及难点
重点介绍自由振动和简谐振动激励作用下的受迫振动。难点是 周期激励和任意激励下的受迫振动 学时分配 共8学时(自由振动、能量法2学时;衰减、受迫3学时;应用、 周期1学时;任意激励、响应谱2学时)
例2-4 计算考虑弹簧质量时弹簧质量系统的固有频率。
解:弹簧各点位移 (s, t )的边界条件为
(0, t ) 0
设 (s, t ) x(t ) f (s)
则f (s)应满足
f (0) 0
(l , t ) x(t )
0sl
f (l ) 1
s ds
l
m
x s 设 f ( s) ,则 图2-6 单自由度振动系统 l l 1 1 me 0 f 2 ( s ) ds l m (mˊ 为弹簧质 3 3
太原科技大学应用科学学院
12
第二章 单自由度系统的振动
§2-2 计算固有频率的能量法
在保守力场中(机械能守恒的力场)
T V 常数
取静平衡位置为势能的零点,则任意一位置时
1 mx 2 2 1 V kx 2 2 T
Vmax Tmax
13
d (V T ) 0 dt
金属橡胶减振器 钢丝绳减振器
23
太原科技大学应用科学学院
第二章 单自由度系统的振动
以平衡位置为坐标原点,向下
mx cx kx 0
2 2nx pn x 0 x
m
k c
o
x
其中 pn
k ———固有频率 m
图2-8 有阻尼系统的衰减振动
c n ———衰减系数 2m
16
太原科技大学应用科学学院
第二章 单自由度系统的振动
§2-3 瑞利法
利用动能计算将分布质量等效为集中质量,加在原来的惯性 元件的集中质量上,作为单自由度系统处理,从而得到更精确的固 有频率的近似值,这种方法称为Rayleigh法 s s处的位移 ( s, t ), 则 ds l (0, t ) 0 0 s l ( s, t ) x (t ) f ( s ) (l , t ) x (t ) m f(s)---形状函数或振型,是质量m有单位 位移时弹簧各点相应的位移. f 必须满足 边界条件 f (0) 0 f (l ) 1
量)
pn
19
k m me
k m m 3
太原科技大学应用科学学院
第二章 单自由度系统的振动
只要将弹簧质量的三分之一作为集中质量加到原质量上就 可以考虑弹簧质量的影响。
1 (m m,误差为0.5%; m m, 误差为0.75%; m 2m,误差为2 %) 2
20
太原科技大学应用科学学院
mg
o
x
该系统自由振动的频率为
f 1 2 g
图2-2 简支梁系统
st
1 2
48 EJ ml 3
太原科技大学应用科学学院
8
第二章 单自由度系统的振动
以撞击时刻为初始时刻,则
x0 st
2 2 0
x0 2 gh
x0 mgl 3 96 EJh 2 A x st 2h st 1 pn 48EJ mgl 3
第二章 单自由度系统的振动
例2-5 如图所示为一均质等直简支梁,中央处有一集中质量m, 计算考虑梁质量时系统的固有频率和梁的等效质量。
解:设
其中
y( x, t ) yc (t ) f ( x)
yc (t ) 梁中点的挠度 f ( x) 梁振动的形状函数
A
m C
yc
B
x
l
dx
2 l 2
图2-7 简支梁振动系统
设
x x f ( x) 3 4 l l
3
l 0 x 2
边界条件 f (0) 0 f ( l ) 1 2
21
太原科技大学应用科学学院
第二章 单自由度系统的振动
设
x x f ( x) 3 4 l l
l
3
l
Tmax
其中
1 2 1 l 2 1 2 2 mxmax f ( s)dsxmax (m me ) pn A2 2 2 0 2
me f 2 (s)ds