linux驱动原理-LED驱动分析
ZedBoard Linux开发 ---- OLED驱动详解

ZedBoard Linux开发---- OLED驱动详解但凡单片机的初学者基本都有这样一个试验,也就是点亮第一个LED,类似于程序员的“helloworld”,我当年也是如此。
本来我也是希望从LED开始学习,不过对于ZedBoard来说,可能还找不到现成的LED驱动程序可以学习(事后发现在Digilent Linux内核中,点亮一个LED所要理解的机制其实更加复杂),反而倒是提供了OLED的内核驱动,因此我们就从点亮OLED开始吧。
对于OLED在用户空间的操作,之前介绍了两种方式,即shell以及编写C应用程序,博客链接如下:/thinki_cao/blog/static/8394487520143193932495/OLED的驱动在Linux内核源码中的位置是linux-digilent/drivers/pmods/pmodoled-gpio.c,而在内核配置中的位置是:-> Device Drivers-> Pmod Support (PMODS [=y])(注意make ARCH=arm menuconfig的时候务必要把ARCH加上)并且默认是编译进内核的,而在Digilent OOB Design中是以模块驱动的形式放在ramdisk文件系统中的,因此如果重新编译内核的话,原先的load_oled,unload_oled都是无法使用的,原理很简单,上面两个命令都是脚本,并且是单纯的insmod以及rmmod驱动。
下面就开始看分析pmodoled-gpio.c文件:首先跳到文件最后几行,找到函数module_platform_driver(gpio_pmodoled_driver); 该函数定义在include/linux/platform_device.h文件中:#define module_platform_driver(__platform_driver) \module_driver(__platform_driver, platform_driver_register, \platform_driver_unregister)而module_driver()函数则定义在include/linux/device.h文件中:#define module_driver(__driver, __register, __unregister, ...) \static int __init __driver##_init(void) \{ \return __register(&(__driver) , ##__VA_ARGS__); \} \module_init(__driver##_init); \static void __exit __driver##_exit(void) \{ \__unregister(&(__driver) , ##__VA_ARGS__); \} \module_exit(__driver##_exit);通俗一点来理解的话,module_platform_driver(gpio_pmodoled_driver);最终展开后就是如下形式:static int __init gpio_pmodoled_driver_init(void){return platform_driver_register(&gpio_pmodoled_driver);}module_init(gpio_pmodoled_driver_init);static void __exit gpio_pmodoled_driver_init(void){return platform_driver_unregister(&gpio_pmodoled_driver);}module_exit(gpio_pmodoled_driver_exit);看到module_init()和module_exit()估计就熟悉很多了,其实一开始我也不习惯这些宏,不过后来习惯了以后发现还是有不少好处的,所以我们编写驱动的时候可以参考内核中的代码风格和习惯,非常具有学习意义。
Linux学习之LED驱动程序简介
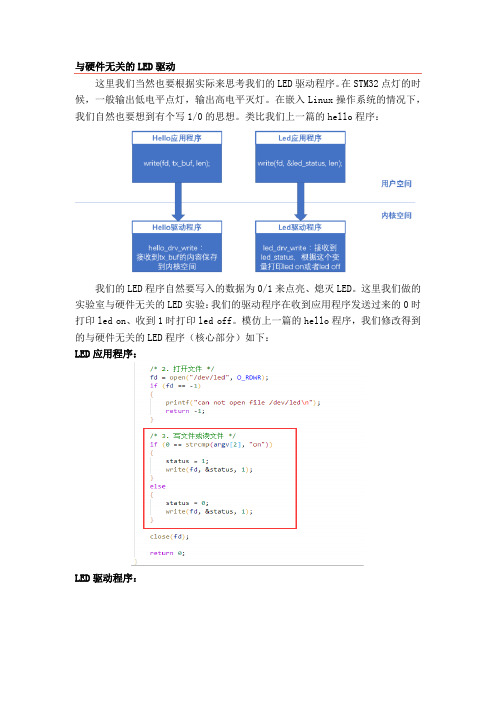
这里我们当然也要根据实际来思考我们的LED驱动程序。
在STM32点灯的时候,一般输出低电平点灯,输出高电平灭灯。
在嵌入Linux操作系统的情况下,我们自然也要想到有个写1/0的思想。
类比我们上一篇的hello程序:我们的LED程序自然要写入的数据为0/1来点亮、熄灭LED。
这里我们做的实验室与硬件无关的LED实验:我们的驱动程序在收到应用程序发送过来的0时打印led on、收到1时打印led off。
模仿上一篇的hello程序,我们修改得到的与硬件无关的LED程序(核心部分)如下:LED应用程序:LED驱动程序:加载led驱动模块及运行应用程序:与硬件有关的LED驱动上面那一节分享的是与硬件无关的LED驱动实验,主要是为了理清LED驱动的大体思路。
这里我们再加入与硬件有关的相关操作以构造与硬件有关的LED驱动程序。
我们在进行STM32的裸机编程的时候,对一些外设进行配置其实就是操作一些地址的过程,这些外设地址在芯片手册中可以看到:这是地址映射图,这里图中只是列出的外设的边界地址,每个外设又有很多寄存器,这些寄存器的地址都是对外设基地址进行偏移得到的。
同样的,对于NXP 的IMX6ULL芯片来说,也是有类似这样的地址的:此时我们要编写Linux系统下的led驱动,涉及到硬件操作的地方操作的并不是这些地址(物理地址),而是操作系统给我们提供的地址(虚拟地址)。
操作系统根据物理地址来给我们生成一个虚拟地址,我们的led驱动操控这个地址就是间接的操控物理地址。
至于这两个地址是怎么联系起来的,里面个原理我们暂且不展开。
我们从函数层面来看,内核给我们提供了ioremap 函数,这个函数可以把物理地址映射为虚拟地址。
这个函数在内核文件arch/arm/include/asm/io.h 中:void __iomem *ioremap(resource_size_t res_cookie, size_t size); •res_cookie:要映射给的物理起始地址。
Linux字符设备驱动之Tiny6410 LED驱动编写

Linux字符设备驱动之Tiny6410 LED驱动分析摘要:驱动程序是应用程序和底层硬件之间的桥梁,非常重要。
字符设备是一种可以当做一个字节流来存取的设备,这样的设备只能一个字节一个字节的进行数据传输,这样的驱动常常至少实现open、close、read、和write系统条用,常见的有串口、LED、文本控制台等,字符设备通过文件系统节点来存取,例如/dev/tty1和/dev/lp0.在一个字符设备和一个普通文件之间唯一相关的不同就是,你可以在普通的文件中移来移去,但是大部分字符社诶仅仅是数据通道,只能顺序存取。
重要概念1.用户空间和内核空间一个驱动模块在内核空间运行,而应用程序则是在用户空间运行,这个概念是操作系统的理论基础。
Linux为这两种空间之间的数据传输定义了两个函数,分别为copy_to_user()和copy_from_user(),从字面意思可以知道函数的意义。
比如在编写驱动程序时,很显然驱动程序属于内核空间,会经常使用copy_from_user()函数,从应用程序中获取数据给驱动程序。
2.编译模块使用make xxxx modules 生成xxx.ko模块。
3.加载和卸载模块(驱动)驱动生成的模块需要加载到内核中,加载模块使用insmod指令,如:insmodxxx.ko卸载驱动则用rmmod命令。
4.所需头文件#include <linux/module.h> //包含大量加载模块所需的函数和符号定义#include<linux/init.h> //制定初始化和清理函数许可凭证指令:MODULE_LICENSE(“GPL”);5.初始化和关停初始化指令:static int __initinitialization_function(void){}module_init(initialization_function);初始化函数应声明为静态,因为他们不会再特定文件之外可见,毕竟static的重点应用是“隐藏”。
嵌入式Linux下LED报警灯驱动设计及编程

《嵌入式Linux下LED报警灯驱动设计及编程》实验报告学生:学号:专业班级:指导教师:完成时间:实验5 嵌入式Linux下LED报警灯驱动设计及编程一.实验目的理解驱动本质,掌握嵌入式Linux系统下驱动开发相关知识,包括端口寄存器访问、接口函数编写、和文件系统挂接、注册及相关应用编程等知识点。
二.实验容实验5.1 嵌入式Linux下LED报警灯驱动设计及跑马灯应用编程实验5.2 添加看门狗功能的跑马灯应用编程三.预备知识Linux使用、驱动相关知识等四.实验设备及工具(包括软件调试工具)硬件:ARM 嵌入式开发平台、PC 机Pentium100 以上、串口线。
软件: WinXP或UBUNTU开发环境。
五.实验5.1步骤5.1 前期准备(1)看懂相关硬件电路图【见S3C6410实验箱电路图-底板.pdf】,以LED报警灯为例进行设计打开PDF硬件电路图,明确LED灯用到的多个GPIO及其控制器本实验电路 LED1-------GPM0LED2-------GPM1LED3-------GPM2LED4-------GPM3LED5-------GPM4LED6-------GPM5LED7-------GPQ0LED8-------GPQ1得出结论:8个LED灯使用到的硬件控制器分别为GPM和GPQ两个硬件控制器(2)在芯片手册中找到相应的硬件控制器部分,重心是看懂端口寄存器本实验要求完成LED流水灯设计,所以需要设置控制器中端口寄存器:GPMCON----设置相应位为输出口GPMDAT-----控制相应位输出高电平-----点亮LED灯输出低电平-----熄灭LED灯(3) linux核中相关寄存器读写函数读寄存器函数readl(寄存器虚地址);写寄存器函数writel(值(无符号整型), 寄存器虚地址);具体端口寄存器地址宏定义在/opt/FriendlyARM/linux-2.6.38/arch/arm/mach-s3c64xx/include/mach文件夹下的文件中,如端口M寄存器在gpio-bank-m.h文件中有定义:#define S3C64XX_GPMCON (S3C64XX_GPM_BASE + 0x00) #define S3C64XX_GPMDAT (S3C64XX_GPM_BASE + 0x04)5.2 LED报警灯驱动设计s3c6410_leddrv.c(1)头文件包含和相关宏定义#include <linux/miscdevice.h>#include <linux/delay.h>#include <asm/irq.h>//#include <mach/regs-gpio.h>#include <mach/hardware.h>#include <linux/kernel.h>#include <linux/module.h>#include <linux/init.h>#include <linux/mm.h>#include <linux/fs.h>#include <linux/types.h>#include <linux/delay.h>#include <linux/moduleparam.h>#include <linux/slab.h>#include <linux/errno.h>#include <linux/ioctl.h>#include <linux/cdev.h>#include <linux/string.h>#include <linux/list.h>#include <linux/pci.h>#include <asm/uaccess.h>#include <asm/atomic.h>#include <asm/unistd.h>#include <mach/map.h>#include <mach/regs-clock.h>#include <mach/regs-gpio.h>#include <plat/gpio-cfg.h>#include <mach/gpio-bank-e.h>#include <mach/gpio-bank-k.h>#define ON 1#define OFF 0(2)编写驱动接口函数/*功能:配置GPM0~5/GPQ0~1为输出口参数:无返回值:无*/void LedConfig(void){//读出端口M控制寄存器(S3C64XX_GPMCON)值,修改并写回相关端口寄存器//add your codeunsigned int tmp;tmp =readl(S3C64XX_GPMCON);tmp &= ~((0XF<<0X0)|(0XF<<0X4)|(0XF<<0X8)|(0XF<<0XC)|(0XF<<0X10)|(0XF<<0X14));tmp |= (0X1<<0X0)|(0X1<<0X4)|(0X1<<0X8)|(0X1<<0XC)|(0X1<<0X10)|(0X1<<0X14);writel(tmp,S3C64XX_GPMCON);}/*功能:点亮第i个LED灯参数:无符号整型变量iLed,表示第i个LED灯返回值:无*/void iLedOn(unsigned int iLed){//读出端口M数据寄存器(S3C64XX_GPKDAT)值,修改并写回相关端口寄存器//add your code hereunsigned int tmp;tmp =readl(S3C64XX_GPMDAT);tmp &= ~((0X1<<0X0)|(0X1<<0X1)|(0X1<<0X2)|(0X1<<0X3)|(0X1<<0X4)|(0X1<<0X5));writel(tmp,S3C64XX_GPMDAT);}/*功能:熄灭第i个LED灯参数:无符号整型变量iLed,表示第i个LED灯返回值:无*/void iLedOff (unsigned int iLed){//读出端口M数据寄存器(S3C64XX_GPKDAT)值,修改并写回相关端口寄存器//add your code hereunsigned int tmp;tmp =readl(S3C64XX_GPMDAT);tmp &= ~((0X1<<0X0)|(0X1<<0X1)|(0X1<<0X2)|(0X1<<0X3)|(0X1<<0X4)|(0X1<<0X5));tmp |= (0X1<<0X0)|(0X1<<0X1)|(0X1<<0X2)|(0X1<<0X3)|(0X1<<0X4)|(0X1<<0X5);writel(tmp,S3C64XX_GPMDAT);}(2)和文件系统接口对接static int s3c6410_led_open(struct inode *inode, struct file *filp){//把之前的端口K控制寄存器值读出来保存起来//调用LedConfig函数,把GPIO口配置成输出口//add your codeold_gpmcon_val=readl(S3C64XX_GPMCON);LedConfig();renturn 0;}static int s3c6410_led _release(struct inode *inode, struct file *filp) {//恢复之前的端口K控制寄存器初始值//add your codewritel(old_gpmcon_val,S3C64XX_GPMCON);renturn 0;}static long s3c6410_led _ioctl(struct file *filp, unsigned int cmd, unsigned long arg){switch(cmd){case ON://点亮所有LED灯//add your codei LedOn();break;case OFF://熄灭所有LED灯break;}}struct file_operations led_fops={.release=___s3c6410_led_release______,.unlocked_ioctl=___s3c6410_led_ioctl____,};(3)添加模块标记代码static int __init led_dev_init(void){int ret;注册设备printk (DEVICE_NAME"\tinitialized\n");return ret;}static void __exit led_dev_exit(void){//注销设备//add your code}module_init(led_dev_init);module_exit(led_dev_exit);MODULE_LICENSE("GPL");MODULE_AUTHOR("licnjupt.");5.2 编写Makefile并加载到核(1)编写all:make –C pwd) modulesclean:rm -rf *.ko *.o(3) 编译使用命令编译:_____#make_____________________________编译完成后生成驱动文件_____leddrv.ko__________________。
实验三 在嵌入式Linux上开发LED控制电路设备驱动程序
实验内容
• 在嵌入式Linux上设计LED控制电路设备驱动 程序ຫໍສະໝຸດ 嵌入式Linux字符型设备
• 嵌入式Linux基本设备类型
– 字符型设备 – 块设备 – 网络设备 – 其他设备(相关的协议栈由kernel附加层支持)
• 嵌入式Linux字符型设备
– 实现和管理简单 – 无需缓冲,直接读写的设备(例如串口设备) – 可以被看作一个类似文件的数据流
与设备驱动程序关联的内核数据结构
Linux内核模块
• Linux模块由没有链接成完整可执行文件的目标 代码组成 • Linux模块可以动态装载(链接)到运行中的内 核中,也可以从内核中动态卸载 • Linux内核提供了对许多模块类型的支持,其中 包括设备驱动程序 • 因为Linux模块运行在内核空间,所以只能调用 内核输出的函数,而不能调用外部库中的函数 (例如只能使用内核输出的printk 函数,而不 能使用libc中的printf函数)
• 申明模块退出函数
– module_exit(cleanup_function);
• 实现模块退出函数
static void __exit cleanup_function(void) { /* Cleanup code here */ }
Linux内核模块管理
• 加载模块(insmod) • 卸载模块(rmmod) • 查询内核中当前加载的模块列表(lsmod)
alteraquartusiiredhatlinuxgnu跨平台开发工具链在嵌入式linux上开发led控制电路设备驱动程序实验?实验原理嵌入式linux设备驱动程序与内核模块嵌入式linux字符型设备嵌入式linux中与设备驱动程序关联的内核数据嵌入式linux中与设备驱动程序关联的内核数据结构嵌入式linux字符型设备驱动程序框架led控制电路设备驱动程序工作原理嵌入式linux设备驱动程序?设备驱动程序是一种可以使计算机和设备通信的特殊程序相当于硬件的接口操作系统通过设备驱动程序来控制硬件设备的工作备的工作?嵌入式linux中设备驱动程序通常是以内核模块的形式存在的linux内核模块?linux模块由没有链接成完整可执行文件的目标代码组成?linux模块可以动态装载链接到运行中的内核中也可以从内核中动态卸载?linux内核提供了对许多模块类型的支持其中包括设备驱动程序?因为linux模块运行在内核空间所以只能调用内核输出的函数而不能调用外部库中的函数例如只能使用内核输出的printk函数而不能使用libc中的printf函数linux内核模块代码结构?申明模块初始化函数moduleinitinitializationfunction
基于嵌入式Linux的LED驱动开发与应用

基于嵌入式Linux的LED驱动开发与应用摘要:简要介绍了基于嵌入式ARM处理器芯片LPC3250的嵌入式Linux的LED驱动程序的开发原理、流程以及相关主要接口硬件电路的设计。
实际运行结果表明,该设计完全达到预期效果。
关键词:嵌入式Linux;LED;硬件;驱动程序0引言随着IT技术和嵌入式技术的快速发展,嵌入式产品已经广泛应用于工业、能源、环保、通信等各个行业,显示出其强大的生命力。
Linux是当今流行的操作系统之一,具有源代码开放、内核稳定、功能强大和可裁减等优点而成为众多应用的首选。
同样嵌入式Linux也继承了Linux的诸多优点。
对Linux应用程序来说,由于设备驱动程序屏蔽了硬件的细节,其硬件设备将作为一个特殊的文件,因此应用程序可以像操作普通文件一样对硬件设备进行操作。
本设计中驱动的设备是基于NXP公司的LPC3250微处理器开发的LED信号指示灯,利用这些指示灯来显示仪器的运行状态,方便用户了解仪器的工作状况。
1LPC3250简介及接口电路设计本设计中主控芯片采用LPC3250微处理器,具有高集成度、高性能、低功耗等特点。
它采用90nm工艺和ARM926EJS内核,主频最高为208MHz,具有全系列标准外设。
其中包括带专用DMA控制器的24位LCD控制器,可支持STN和TFT面板。
充分满足本设计的需要,外部只需加入很少芯片就可实现系统功能<sup>[1]</sup>。
LPC3250共有296个管脚。
对于4个LED灯来说需要用到4个引脚,这里使用GPIO端口来设计,GPM1~GPM3作为LED灯的控制端口,另外还需要为LED提供电源,这里需要3.3V的直流电源。
接口电路设计如图1所示。
GPM0~GPM3分别与电阻、LED连接,当GPM0~GPM3置为低电平时,相应的LED灯点亮。
2驱动程序设计在嵌入式Linux操作系统下,有三类主要的设备文件类型:字符设备、块设备和网络设备<sup>[2]</sup>。
Tiny-S3C6410_Linux下LED灯驱动移植过程
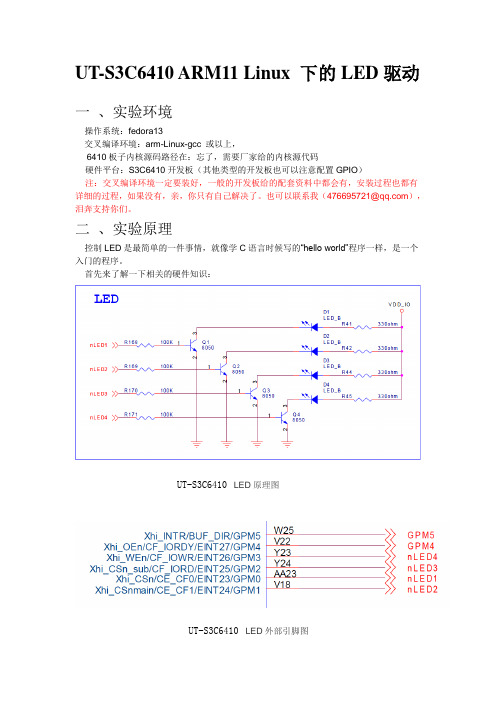
UT-S3C6410 ARM11 Linux 下的LED驱动一、实验环境操作系统:fedora13交叉编译环境:arm-Linux-gcc 或以上,6410板子内核源码路径在:忘了,需要厂家给的内核源代码硬件平台:S3C6410开发板(其他类型的开发板也可以注意配置GPIO)注:交叉编译环境一定要装好,一般的开发板给的配套资料中都会有,安装过程也都有详细的过程,如果没有,亲,你只有自己解决了。
也可以联系我(****************),泪奔支持你们。
二、实验原理控制LED是最简单的一件事情,就像学C语言时候写的“hello world”程序一样,是一个入门的程序。
首先来了解一下相关的硬件知识:UT-S3C6410LED原理图UT-S3C6410LED外部引脚图从上面的原理图可以得知,LED与CPU引脚的连接方法如下,高电平点亮。
LED1 -GPM0LED2 -GPM1LED3 -GPM2LED4 -GPM3从数据手册可以找到相应的控制方法。
这里我们以LED1为例,介绍一下LED1的操作方法,其他的类似,请大家自行分析。
通过上面可以得知,需要先将GPM0设置为输出方式。
将寄存器GPMCON低四位配置成0001。
然后将GPMDAT寄存器的第0位置1灯亮,置LED0灯亮,开发板上有四个LED所以要对GPMDAT的低四位进行操作,就可以实现对灯的亮灭操作了。
三、实验步骤1、编写驱动程序mini6410_leds.c#include <linux/miscdevice.h>#include <linux/delay.h>#include <asm/irq.h>//#include <mach/regs-gpio.h>#include <mach/hardware.h>#include <linux/kernel.h>#include <linux/module.h>#include <linux/init.h>#include <linux/mm.h>#include <linux/fs.h>#include <linux/types.h>#include <linux/delay.h>#include <linux/moduleparam.h>#include <linux/slab.h>#include <linux/errno.h>#include <linux/ioctl.h>#include <linux/cdev.h>#include <linux/string.h>#include <linux/list.h>#include <linux/pci.h>#include <asm/uaccess.h>#include <asm/atomic.h>#include <asm/unistd.h>#include <mach/map.h>#include <mach/regs-clock.h>#include <mach/regs-gpio.h>#include <plat/gpio-cfg.h>#include <mach/gpio-bank-e.h>#include <mach/gpio-bank-k.h>#define DEVICE_NAME "leds"static long sbc2440_leds_ioctl(struct file *filp, unsigned int cmd, unsigned long arg) {switch(cmd) {unsigned tmp;case 0:case 1:if (arg > 4) {return -EINVAL;}tmp = readl(S3C64XX_GPKDAT);tmp &= ~(1 << (4 + arg));tmp |= ( (!cmd) << (4 + arg) );writel(tmp, S3C64XX_GPKDAT);//printk (DEVICE_NAME": %d %d\n", arg, cmd); return 0;default:return -EINVAL;}}static struct file_operations dev_fops = {.owner = THIS_MODULE,.unlocked_ioctl = sbc2440_leds_ioctl,};static struct miscdevice misc = {.minor = MISC_DYNAMIC_MINOR,.name = DEVICE_NAME,.fops = &dev_fops,};static int __init dev_init(void){int ret;{unsigned tmp;tmp = readl(S3C64XX_GPKCON);tmp = (tmp & ~(0xffffU<<16))|(0x1111U<<16); writel(tmp, S3C64XX_GPKCON);tmp = readl(S3C64XX_GPKDAT);tmp |= (0xF << 4);writel(tmp, S3C64XX_GPKDAT);}ret = misc_register(&misc);printk (DEVICE_NAME"\tinitialized\n");return ret;}static void __exit dev_exit(void){misc_deregister(&misc);}module_init(dev_init);module_exit(dev_exit);MODULE_LICENSE("GPL");MODULE_AUTHOR("FriendlyARM Inc.");(1)把Hello,Module 加入内核代码树,并编译一般编译2.6 版本的驱动模块需要把驱动代码加入内核代码树,并做相应的配置,如下步骤(注意:实际上以下步骤均已经做好,你只需要打开检查一下直接编译就可以了):Step1:编辑配置文件Kconfig,加入驱动选项,使之在make menuconfig 的时候出现打开linux-2.6.38/drivers/char/Kconfig 文件,添加如图所示:#====================cgf add===================================== config MINI6410_LEDStristate "LED Support for Mini6410 GPIO LEDs"depends on CPU_S3C6410default yhelpThis option enables support for LEDs connected to GPIO lineson Mini6410 boards.#================================================================== 保存退出,这时在linux-2.6.38 目录位置运行一下make menuconfig 就可以在DeviceDrivers Character devices 菜单中看到刚才所添加的选项了,按下空格键将会选择为<M>,此意为要把该选项编译为模块方式;再按下空格会变为<*>,意为要把该选项编译到内核中,在此我们选择<M>,如图,如果没有出现,请检查你是否已经装载了缺省的内核配置文件,(2)Makefile文件Step2:通过上一步,我们虽然可以在配置内核的时候进行选择,但实际上此时执行编译内核还是不能把mini6410_leds.c编译进去的,还需要在Makefile 中把内核配置选项和真正的源代码联系起来,打开linux-2.6.38-cgf/drivers/char/Makefile,obj-$(CONFIG_MINI6410_LEDS) += mini6410_leds.o添加并保存退出Step3:这时回到linux-2.6.38 源代码根目录位置,执行make modules,就可以生成我们所需要的内核模块文件drivers/char/mini6410_leds.ko 了,注意:执行make modules 之前,必须先执行make zImage,只需一次就可以了。
第四章 LED驱动程序 Linux设备驱动程序 教学课件

目录
嵌入式Linux字符设备的驱动程序结构 设备驱动程序中的问题 GPIO原理介绍 LED的驱动程序实例及测试
I/O端口
驱动程序是介于操作系统和系统硬件之间 的负责通信的接口,它把软件和硬件分开, 其作用如图:
作。如清除缓冲区。如果设备是独占的,则open函 数必须将设备标记成忙状态。
Close入口点
Close函数负责关闭设备的操作。 当最后一次使用设备完成后,调用close函数,关闭
设备文件。独占设备必须标记为可再次使用。
字符设备驱动程序的入口
Read入口点
Read函数负责从设备上读数据和命令,有缓冲区的 I/O设备操作一般是从缓冲区里读数据。
loff_t * f_ops) {
return count; }
// ------------------- WRITE ----------------------ssize_t GPIO_LED_write (struct file * file ,const char * buf, size_t
这些通用的GPIO接口是可配置的。每个端口都可以通 过软件配置寄存器来满足不同系统和设计的需要。在运 行主程序之前,必须先对每一个用到的引脚的功能进行 设置。如果某些引脚的复用功能没有使用,那么可以先 将该引脚设置为I/O端口。
S3C2410X芯片与端口相关的寄存器
端口控制寄存器(GPACON—GPHCON)
Linux的设备文件是同硬件一一对应的,因而对设备的 操作可以通过对设备文件的操作来实现。而这些操作方 式其实就是一些标准的系统调用,如open()、read()、 write()、close()等。实际上,file_operations就是把系 统调用和驱动程序关联起来的关键数据结构。这个结构 的每个成员都对应着一个系统调用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章:Linux驱动介绍5.1 驱动原理:LINUX提供标准接口函数给底层,底层驱动按照LINUX编程规则进行驱动编写。
操作系统是通过各种驱动程序来驾驭硬件设备的,它为用户屏蔽了各种各样的设备,驱动硬件是操作系统最基本的功能,并且提供统一的操作方式。
设备驱动程序是内核的一部分,硬件驱动程序是操作系统最基本的组成部分,在Linux内核源程序中也占有60%以上。
因此,熟悉驱动的编写是很重要的.Linux内核中采用可加载的模块化设计(LKMs,Loadable Kernel Modules),一般情况下编译的Linux内核是支持可插入式模块的,也就是将最基本的核心代码编译在内核中,其他的代码可以编译到内核中,或者编译为内核的模块文件(在需要时动态加载)。
5.2 内核模块的主要相关命令◆lsmod:列出当前系统中加载的模块,其中左边第一列是模块名,第二列是该模块大小,第三列则是使用该模块的对象数目。
◆rmmod:是用于将当前模块卸载。
◆insmod和modprobe是用于加载当前模块,但insmod不会自动解决依存关系,即如果要加载的模块引用了当前内核符号表中不存在的符号,则无法加载,也不会去查在其他尚未加载的模块中是否定义了该符号;modprobe可以根据模块间依存关系以及/etc/modules.conf文件中的内容自动加载其他有依赖关系的模块。
5.3 设备分类Linux系统的设备分为三类:字符设备--(包含一个混杂设备)、块设备和网络设备。
字符设备通常指像普通文件或字节流一样,以字节为单位顺序读写的设备,如并口设备、虚拟控制台等。
字符设备可以通过设备文件节点访问,它与普通文件之间的区别在于普通文件可以被随机访问(可以前后移动访问指针),而大多数字符设备只能提供顺序访问,因为对它们的访问不会被系统所缓存。
但也有例外,例如帧缓存(framebuffer)是一个可以被随机访问的字符设备。
块设备通常指一些需要以块为单位随机读写的设备,如IDE硬盘、SCSI硬盘、光驱等。
块设备也是通过文件节点来访问,它不仅可以提供随机访问,而且可以容纳文件系统(例如硬盘、闪存等)。
Linux可以使用户态程序像访问字符设备一样每次进行任意字节的操作,只是在内核态内部中的管理方式和内核提供的驱动接口上不同。
$ ls –l /devcrw-rw---- 1 root uucp 4, 64 08-30 22:58 ttyS0 /*串口设备, c表示字符设备*/ brw-r----- 1 root disk 8, 0 08-11 23:03 sda /*硬盘设备,b表示块设备*/ 5.4 设备驱动程序工作原理模块在调用insmod命令时被加载,此时的入口点是init_module()函数,通常在该函数中完成设备的注册。
同样,模块在调用rmmod命令时被卸载,此时的入口点是cleanup_module()函数,在该函数中完成设备的卸载。
在设备完成注册加载之后,用户的应用程序就可以对该设备进行一定的操作,如open()、read()、write()等,而驱动程序就是用于实现这些操作,在用户应用程序调用相应入口函数时执行相关的操作。
5.5 应用程序、库、内核、驱动程序的关系:4层软件关系如下:1.应用程序通过open函数打开设备文件;2.库根据open函数执行swi中断,引起异常进入内核;3.内核根据异常相关参数(应用程序传递的)找到相应驱动程序,并返回一文件句柄给库;4.库根据文件句柄,触发库提供的write或ioclt函数(函数相关参数由应用程序提供)执行swi触发异常后进入内核;5.内核根据传递的相关参数调用驱动程序相关函数进行相关操作,如点亮led等。
5.6 LINUX驱动程序开发步骤:1.查看原理图、数据手册,了解设备的操作方法;2.在内核中找到相近的驱动程序,以它为模块进行开发,有时候需要从零开始;3.实现驱动程序的初始化:比如向内核注册这个驱动程序,这样应用程序传入文件名时,内核才能找到相应的驱动程序;4.设计所要实现的操作,比如open、close、read、write等函数;5.实现中断服务(中断并不是每个设备驱动所必须的)。
6.编译该驱动程序到内核中,或者用insmod命令加载;7.测试驱动程序。
5.7 驱动程序的加载和卸载:可以将驱动程序静态编译进内核中,也可以将它作为模块在使用时再加载。
在配置内核时,如果某个配置项设为m,就表示它将会被编译成一个模块。
在linux2.6内核中,模块的扩展名为.ko,可以使用insmod 命令加载,使用rmmod命令卸载,使用lsmod命令查看内核中已经加载了哪些模块。
当使用insmod加载模块时,模块的初始化函数被调用,它用来向内核注册驱动程序;当使用rmmod卸载模块时,模块的清除函数被调用。
在驱动代码中,这两个函数要么取固定的名字:init_module和5.8关键概念5.8.1 不可剥夺型(non-preemptive kernel):(分时操作系统内核)要求每个任务主动放弃CPU的使用权。
优点:响应中断快;几乎无须使用信号量保护共享数据,运行中的任务占有CPU,而不必担心被别的任务抢占。
缺点:响应时间,高优先级的任务已经进入就绪态,但还不能运行,要等,直到当前运行着的任务释放CPU。
5.8.2 可剥夺型内核(preemptive kernel):(实时操作系统内核)最高优先级的任务一旦就绪,总能得到CPU的使用权。
当一个运行着的任务使一个比它优先级高的任务进入就绪态时,当前任务的CPU使用权就被剥夺了,或者说被挂起了,更高优先级的任务立刻得到了CPU的使用权。
如果是中断服务子程序使一个高优先级的任务进入就绪态,中断完成时,中断了的任务被挂起,优先级高的任务开始运行。
可剥夺型内核使得任务级响应时间得以最优化。
5.8.3 可重入函数:可以被一个以上的任务调用,而不必担心数据被破坏。
可重入函数任何时候都可以被中断,一段时间以后又可以运行,而相应的数据不会丢失。
可重入函数或者只使用局部变量,即变量保存在CPU寄存器中或堆栈中;或者使用全局变量,则要对全局变量予以保护。
(一个函数被多个任务调用时,每个任务都有自己独立的栈函数存放该函数运行的中间变量)。
5.8.4 资源:任何被任务所占用的实体都可称为资源。
资源可以是输入/输出设备,也可以是一个变量,一个结构或一个数组。
5.8.5 共享资源:可以被一个以上使用的资源叫做共享资源。
为了防止数据被破坏,每个任务在与共享资源打交道时,必须独占该资源。
这叫做互斥(mutual exclusion)。
5.8.6 代码的临界段也称为临界区,指处理时不可分割的代码。
一旦这部分代码开始执行,则不允许任何中断打入。
为确保临界段代码的执行不被中断,在进入临界段之前必须关中断,而临界段代码执行完后,要立即开中断。
5.8.7 实时系统的特点如果逻辑和时序出现偏差,将会引起严重后果。
有两种类型的实时系统:1.软实时系统:系统的宗旨是使各个任务尽快的运行,而不要求限定某一任务在多长时间内完成;如uc/os操作系统。
2.硬实时系统:各个任务不仅须执行无误,而且要做到准时。
像VxWorks通过硬件完成(例如通过定时器等方式),优先级高任务先执行,且每个任务执行时间可以指定。
大多数实时系统是两者的结合。
如uc/os中可以通过中断发生来改变任务运行状态(任务切换)就是一种硬件机制来完成。
5.8.8 死锁:也称为抱死(deadlock或deadly embrace),指两个任务无限期的相互等待对方控制着的资源。
最简单的防止死锁的方法,让每个任务都:(1)先得到全部需要的资源,再做下一步的工作;(2)用同样的顺序申请多个资源;(3)释放资源时,使用相反的顺序(按啥顺序得到,就按啥顺序释放,和中断进栈、出栈类似)。
内核通过定义等待超时来化解死锁-当等待时间超过了某一确定值,而信号量还是无效状态时,就会返回某种形式的出现超时错误的代码。
这个出错代码告知该任务,不是得到了资源使用权,而使系统错误。
5.8.9 Linux将进程状态描述为如下五种:TASK_RUNNING:可运行状态。
处于该状态的进程能被调度执行而成为当前进程。
TASK_INTERRUPTIBLE:可中断的睡眠状态。
处于该状态的进程在所需资源有效时被唤醒,也能通过信号或定时中断唤醒。
TASK_UNINTERRUPTIBLE:不可中断的睡眠状态。
处于该状态的进程仅当所需资源有效时被唤醒。
TASK_ZOMBIE:僵尸状态。
表示进程结束且已释放资源,但其task_struct(任务结构体)仍未释放。
相当于进程已经结束,但在内核的任务表里面还有相应的结构资源。
TASK_STOPPED:暂停状态。
处于该状态的进程通过其他进程的信号才能被唤醒。
如果处于暂停状态的进程被其它进程唤醒,但资源没有到位,那么就进入睡眠状态。
5.8.10 linux内核的三种调度方法:1.SCHED_OTHER 分时调度策略;(各任务时间片平均分配,linux2.4以前的内核)2.SCHED_FIFO实时调度策略,先到先服务;(各任务谁优先级高,先运行谁,linux改进版本,要付费的)3.SCHED_RR实时调度策略,时间片轮转(同优先级就可以按时间分片,不是同优先级按实时调度)(如linux2.6版本,半实时操作系统)。
实时进程将得到优先调用,实时进程根据实时优先级决定调度权值,分时进程则通过nice(优先级)和counter(个数,时间片)值决定权值,nice越小(优先级越高),counter越大,被调度的概率越大,也就是曾经使用了cpu最少的进程将会得到优先调度。
SHCED_RR和SCHED_FIFO的不同:当采用SHCED_RR策略的进程的时间片用完,系统将重新分配时间片,并置于就绪队列尾。
放在队列尾保证了所有具有相同优先级的RR任务的调度公平。
SCHED_FIFO一旦占用cpu则一直运行。
一直运行直到有更高优先级任务到达或自己放弃。
如果有相同优先级的实时进程(根据优先级计算的调度权值是一样的)已经准备好,FIFO时必须等待该进程主动放弃后才可以运行这个优先级相同的任务。
而RR可以让每个任务都执行一段时间。
相同点:1)RR和FIFO都只用于实时任务。
2)创建时优先级大于0(1-99)。
3)按照可抢占优先级调度算法进行。
4)就绪态的实时任务立即抢占非实时任务。
(SCHED_FIFO是实时,一个任务在执行,相同优先级其它任务不能执行;SHCED_RR是实时,同优先级协商式,一个任务在执行,相同优先级可以同时以时间片方式执行)。
5.8.11 所有任务都采用linux分时调度策略时:1.创建任务指定采用分时调度策略,并指定优先级nice值(-20~19)。