GPS-7定位基本原理
GPS定位原理经典详解
GPS定位原理经典详解GPS(全球定位系统)是由美国国防部开发的一种卫星导航系统,能够提供定位、导航和时间同步的服务。
它由三个主要组成部分构成:卫星部分、地面控制部分和用户接收器部分。
GPS的定位原理主要基于三角测量原理。
系统中至少需要在地球上有4颗以上的卫星,用户接收器会通过接收这些卫星发射的信号,并计算出到达时间,进而计算出用户与每颗卫星之间的距离。
具体来说,GPS定位的主要步骤包括卫星发射信号、接收器接收信号和位置计算。
首先,卫星以不同频率发射信号,包括L1频段(1575.42MHz)和L2频段(1227.60MHz)。
这些信号都包含由卫星发射的导航信息以及卫星的位置和时间信息。
接下来,用户接收器接收到这些信号后,会对信号进行处理。
首先,它会准确地确定信号的到达时间,通过测量信号的传播时间。
用户接收器还会对信号进行解码,以获取导航和定时信息。
一旦接收器收集到足够多的信号,它就可以计算出自身与每颗卫星之间的距离,这称为伪距测量。
伪距是通过测量信号从卫星发射到接收器到达的时间来计算的。
由于信号传输速度恒定,接收器可以根据信号传播时间计算出距离。
然而,由于信号在传输过程中可能会受到影响而发生延迟,所以计算出的距离可能不是非常准确。
为了解决这个问题,用户接收器会使用更多的卫星信号,并利用差分GPS技术来更精确地测量距离。
最后,用户接收器使用三角测量原理来计算出自己的位置。
通过测量与不同卫星之间的距离,接收器可以确定在地球上的位置。
至少需要三颗卫星的信号来进行定位,但使用更多的卫星可以提高精度。
除了定位,GPS还可以提供导航和时间同步的功能。
通过获取多颗卫星的信号,用户接收器可以计算出自己相对于目标点的方向,从而实现导航功能。
同时,GPS还可以提供高精度的时间信息,用于科学研究、通信、金融交易等领域。
总结起来,GPS定位原理基于三角测量,通过接收卫星发射的信号,并计算出到达时间和距离来确定位置。
GPS的发展使得定位和导航变得更加准确和方便,广泛应用于交通、军事、航空、航海和日常生活中。
gps的原理是什么

gps的原理是什么
GPS的原理是基于卫星定位系统工作的。
GPS系统由地面的
控制站和在轨道上绕地球运行的一组24颗卫星组成。
这些卫
星被称为全球定位系统,它们以恒定的速度绕地球周围运行。
每颗卫星每天绕地球转两次,通过固定的轨道,确保整个地球上的任何地点都可以收到至少四颗卫星的信号。
GPS设备接收卫星发出的信号,并通过计算信号发送和接收
的时间来确定位置。
每颗卫星都具有一个精确的原子钟,其时间同步在地面控制站进行监控和修正。
当GPS接收器接收到
至少四颗卫星的信号时,它能够计算出接收器与每颗卫星之间的距离。
然后,通过三角测量原理,GPS设备可以确定接收
器所在的地理坐标。
在进行位置计算时,GPS接收器会考虑到卫星的位置和距离,以及信号的传输速度。
由于信号在空间中传播的速度是已知的,接收器可以计算出信号从卫星到接收器的距离,并以此为基础来确定位置。
这些计算需要高度精确的时间测量,因此GPS
接收器需要使用非常精确的原子钟。
总结来说,GPS的原理是通过接收卫星发送的信号,并计算
信号的时间和距离来确定接收器的位置。
GPS系统的准确性
取决于卫星的数量和位置,以及接收器的精确度和计算能力。
GPS定位器原理【附原理图】
GPS定位器原理【附原理图】在了解GPS定位器工作原理之前,首先先了解一下GPS定位器是什么?简单的来说,GPS定位器是内置了一种叫“GPS模块”和“移动通信模块的终端”,通过将GPS模块获得的定位数据通过移动通信模块(GSM/GPRS网络)传到网站的一台服务器,从而可以实现在电脑看查询终端的地理位置。
那么其原理是怎么工作的呢?GPS 信号接收机的主要工作任务是:能够捕捉到按一定卫星高度截止角所选择的待测卫星的信号,然后跟踪这些卫星信号的运行状况,将这些所接收的信号进行放大、变换与处理,以便可以测量出GPS信号从卫星到接收机天线的传播时间,解译出GPS卫星所发送的导航电文,实时地计算出测站的三维位置,位置,甚至三维速度和时间。
当在静态定位中,PS 接收机在捕获和跟踪GPS卫星的过程中固定不变,接收机高精度地测量GPS信号的传播时间,利用GPS卫星在轨的已知位置,解算出接收机天线所在位置的三维坐标。
而动态定位则是用GPS接收机测定一个运动物体的运行轨迹。
GPS信号接收机所位于的运动物体叫做载体(如航行中的船舰,空中的飞机,行走的车辆等)。
载体上的GPS接收机天线在跟踪GPS卫星的过程中相对地球而运动,接收机用GPS 信号实时地测得运动载体的状态参数(瞬间三维位置和三维速度)。
接收机硬件和机内软件以及GPS数据的后处理软件包,构成完整的GPS用户设备。
GPS接收机的结构分为天线单元和接收单元两大部分。
对于测地型接收机来说,两个单元一般分成两个独立的部件,观测时将天线单元安置在测站上,接收单元置于测站附近的适当地方,用电缆线将两者连接成一个整机。
也有的将天线单元和接收单元制作成一个整体,观测时将其安置在测站点上。
关于GPS定位器去哪里购买,很多人都说讯拓科盛挺好的!GPS接收机一般用蓄电池做电源。
同时采用机内机外两种直流电源。
设置机内电池的目的在于更换外电池时不中断连续观测。
在用机外电池的过程中,机内电池自动充电。
gps测量基本原理
gps测量基本原理
GPS测量基本原理是通过使用全球定位系统(GPS)技术来确定一个接收器的位置。
GPS系统由一组卫星、地面控制站和
用户接收器组成。
首先,GPS系统中的卫星通过发送信号来广播自己的位置和
时间信息。
这些信号到达地面上的接收器,接收器通过测量信号的传播时间来计算卫星与其之间的距离。
接收器同时接收并处理至少四个卫星的信号,然后使用三角测量原理来确定自身的位置。
通过比较接收器与卫星之间的距离,可以确定接收器与每个卫星之间的球面上的交点。
多个卫星的交点交叉在一起,确定了接收器的位置。
为了提高测量精度,GPS系统还使用了精确的时钟和差分
GPS技术。
精确时钟对于精确测量信号的传播时间至关重要。
差分GPS技术使用附近的基准站的位置信息来纠正接收器位
置的误差,从而提高测量的准确度。
总结来说,GPS测量基本原理是通过测量接收器与卫星之间
的距离来确定接收器的位置。
这是通过接收卫星的信号,计算信号传播时间并使用三角测量原理来实现的。
同时,精确时钟和差分GPS技术也是提高测量精度的重要因素。
gps定位基本原理
gps定位基本原理GPS定位基本原理。
GPS(Global Positioning System)是一种通过卫星定位技术来确定地理位置的系统。
它是由美国国防部研发的,现已成为全球范围内最常用的定位系统之一。
GPS定位基本原理主要包括卫星发射信号、接收信号和计算位置三个关键步骤。
首先,GPS系统由一组24颗绕地球轨道运行的卫星组成。
这些卫星每天都会围绕地球运行两次,它们的轨道设计得非常精确,以便能够在任何时候都能够覆盖地球上的任何一个位置。
这些卫星会不断地向地面发射无线电信号,这些信号包含有关卫星本身的信息以及发射信号的时间戳。
其次,GPS接收器是用来接收卫星发射的信号并计算出接收器所在位置的设备。
当接收器接收到至少三颗卫星的信号时,它就能够计算出自己的位置。
这是因为每颗卫星的信号都包含了卫星的精确位置和发射信号的时间戳,接收器可以利用这些信息来计算出自己与每颗卫星之间的距离。
最后,接收器利用三颗或更多卫星的信号来计算出自己的精确位置。
这是通过三角定位法来实现的,接收器利用自己与每颗卫星之间的距离来确定自己在地球上的位置。
当接收器能够接收到更多的卫星信号时,它的定位精度就会更高。
除了卫星信号之外,GPS定位还受到一些因素的影响,比如大气层的影响、地形的影响以及接收器本身的精度等。
因此,在实际使用中,为了提高定位的准确性,通常会采用差分GPS技术或者增强型GPS技术来进行定位。
总的来说,GPS定位基本原理是通过卫星发射信号、接收信号和计算位置三个关键步骤来实现的。
通过这些步骤,GPS系统能够为人们提供精确的地理位置信息,广泛应用于导航、地图绘制、航空航海、军事作战等领域。
随着技术的不断发展,GPS定位系统的精度和可靠性将会不断提升,为人们的生活和工作带来更多便利。
GPS定位原理详解
GPS定位原理详解GPS(全球定位系统)是一种利用卫星进行定位的技术系统,它通过接收地球上多颗人造卫星发射的广播信号,来确定接收器的位置、速度和时间。
GPS定位原理涉及到卫星导航、信号传输和接收、测量方法等多个方面。
下面将对GPS定位原理进行详细解释。
首先,GPS定位利用的是卫星导航系统。
目前全球范围内使用的GPS系统中包含了24颗工作状态的卫星,它们分布在地球轨道上的不同位置。
这24颗卫星中,至少有4颗卫星能够同时与接收器建立通信,并传输定位信息。
卫星通过精确的计算和测量,确定自己的位置和时间信息,并将这些信息以无线电信号的形式发送到地球上。
这些信号包括卫星的位置参数、传输时间信息和卫星的识别数据等。
接收器接收到这些信号后,通过解码和计算,可以确定卫星位置和时间,进而利用三角定位原理计算接收器的位置。
三角定位原理是GPS定位的核心原理之一、当接收器能够接收到至少4颗卫星的信号时,它可以利用三角几何原理来计算自身的位置。
接收器通过测量卫星信号的传输时间以及卫星位置参数,可以计算出到每颗卫星的距离。
由于位置参数已知,接收器可以得到三个卫星之间的距离,从而确定接收器所处的位置。
为了进行更精确的定位,GPS系统还使用了差分GPS技术。
差分GPS是一种相对GPS的改进技术,它通过对接收到的信号进行实时的改正和校准,来提高定位的精度。
差分GPS技术利用地面上的参考站接收并处理卫星信号,然后将校准参数通过数据链路发送给用户,使GPS接收器能够进行更准确的位置计算。
另外,GPS定位还需要考虑信号传输和接收方面的问题。
卫星信号需要经过大气层的传输,而大气层中的电离层对信号传播会有影响,造成信号的延迟和失真。
为了减少这种影响,GPS系统使用了GPS接收器内部的高精度时钟来计算信号传输的时间差,从而减小电离层的影响。
此外,为了进一步提高精度,GPS接收器还可以通过使用辅助传感器来获取其他的定位信息。
常见的辅助传感器包括指南针、气压计、陀螺仪等,它们可以提供接收器的方向、高度和姿态等信息,从而提高位置计算的准确度。
gps定位的原理
gps定位的原理
GPS定位的原理。
GPS(全球定位系统)是一种通过卫星信号来确定地理位置的技术。
它是由美
国国防部开发的,现在已经成为了全球范围内最常用的定位技术之一。
GPS定位
的原理主要基于三角测量原理,通过接收来自卫星的信号来确定接收器的位置,下面我们来详细了解一下GPS定位的原理。
首先,GPS系统由24颗卫星组成,它们以不同的轨道和高度分布在地球周围。
这些卫星每天都会绕地球两次以上,它们通过无线电信号向地面上的GPS接收器
发送信号。
当GPS接收器接收到来自至少三颗卫星的信号时,就可以利用三角测
量原理来确定自己的位置。
其次,GPS接收器接收到卫星信号后,会测量信号的传播时间。
由于信号的传
播速度是已知的,因此通过测量信号的传播时间,就可以计算出信号的传播距离。
接着,GPS接收器会利用三个卫星的信号来确定自己的位置。
通过三角测量原理,可以得出接收器与每颗卫星之间的距离,然后将这些距离叠加到一张地图上,就可以确定接收器的位置。
最后,GPS定位的精度受到多种因素的影响,比如大气层的影响、地形的遮挡、信号传播的多径效应等。
为了提高GPS定位的精度,可以采取一些措施,比如增
加接收卫星的数量、使用差分GPS技术、采用惯性导航系统等。
总的来说,GPS定位的原理是基于卫星信号的三角测量原理,通过测量卫星信
号的传播时间和距离,来确定接收器的位置。
虽然GPS定位受到一些因素的影响,但是通过一些技术手段可以提高其精度。
随着技术的不断发展,相信GPS定位技
术会在未来得到更广泛的应用。
gps 定位原理
gps 定位原理
全球定位系统(GPS)是一种基于卫星定位技术的全球定位和导航系统。
原理上,GPS系统由一组24颗卫星组成,这些卫星在地球轨道上进行运行。
每颗卫星每天跨越地球两次,提供全球覆盖。
GPS设备通过接收从卫星发射的无线信号来确定其位置。
GPS定位原理基于三角测量原理。
当GPS接收器接收到至少三颗卫星发射的信号时,它就能计算出其位置。
GPS接收器测量收到信号的时间,并使用卫星信号传播速度的常值来计算信号传播的距离。
通过将距离与卫星的已知位置进行三角测量计算,GPS接收器可以确定其自身的位置。
在实际应用中,GPS接收器通常接收多于三颗卫星的信号,以提高定位的准确度和精度。
接收器会使用更多的卫星信号来进行多边测量,以消除误差,例如大气衰减和钟差等因素的影响。
通过精确测量卫星信号从发射到接收所需要的时间,并结合卫星位置和时间信息,GPS接收器能够计算出用户的地理坐标,即纬度、经度和海拔高度。
总结而言,GPS定位原理是通过接收从卫星发射的信号,测量信号传播时间,并利用卫星的位置信息进行三角测量计算,从而确定接收器的位置。
通过接收多颗卫星的信号并进行多边测量,可以提高定位的准确度和精度。
GPS定位基本原理
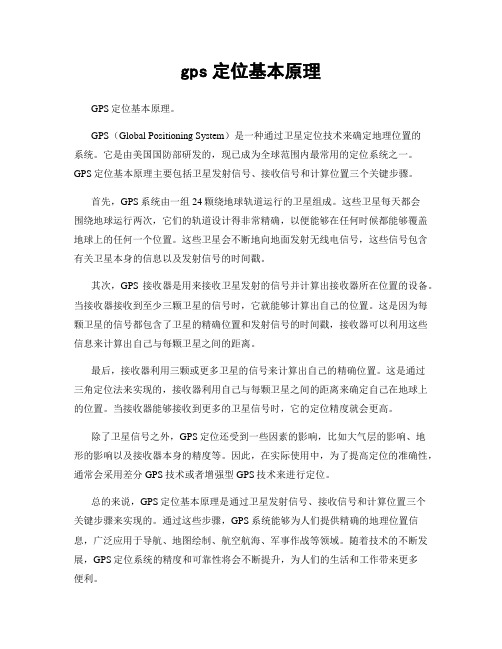
Each satellite carries around four atomic clocks
Uses the oscillation of cesium and rubidium atoms to measure time
精确定位必须解决两个问题:确定卫星准确位置;准 确测定卫星到地面测点的距离。
1.测距方法
伪距测量(伪码测距):测量GPS卫星发射的测距码 信号到达用户接收机的传播时间。
载波相位测量:测量具有载波多普勒频移的GPS卫星 载波信号与接收机产生的参考信号之间的相位差。
多普勒测量:由积分多普勒计数得出的伪距。
GPS系统的定位过程可简述为如下步骤: 跟踪、选择卫星、接收选定卫星的信号。 解读、解算出卫星。 测量得到卫星和用户之间的相对位置。 解算得到用户的最可信赖位置。
“交会法” 定位
已知一颗卫星的位置和接收器到它的距离,就可以确定接收器在一个球面上。 已知两颗卫星的位置和接收器到它们的距离,就可以确定接收器在一个环上。 如果知道三颗卫星的位置和接收器到它们的距离,通常可以确定接收器一定
Time Difference
Satellite PRN
Receiver PRN
Distance Measuring
The whole system பைடு நூலகம்evolves around
time!!!
Distance = Rate x Time
Rate = 186,000 miles per second (Speed of Light)
T
T+3
GPS定位原理概述
GPS定位原理概述
GPS(全球定位系统)是一种以卫星定位技术为基础的,可实现全球
范围内任一地点定位的位置和时差的技术系统。
它由美国国防部正式发行,全球使用,可以向使用者提供位置、速度和时间信息的全球无线定位信息
服务。
GPS定位系统是由由美国国防部发射的24颗“全球定位卫星”组成的,它们都是经轨道发射的,距离地球的距离不同,运行在同一轨道,每
天运行一圈,每天发射6次数据,每10.5小时旋转一圈,至少有4颗以
上定位卫星连接,从而形成稳定的定位卫星网,其服务全球。
GPS定位系统技术原理,是把原理非常抽象复杂的物理定位原理,通
过复杂的距离矢量、时间差等技术概念,转换成用户可以直观了解的定位
信息,整个全球定位系统机制由定位接收机、卫星系统组成,接收机可以
接收到卫星发射的讯号,从而实现位置定位。
定位技术正常工作的基础是接收机的存在和接收机与卫星的无线连接。
定位技术的基本发展原理是:接收机和卫星天线之间存在双向连接,接收
机通过天线接收到来自卫星的位置信息,并将这些信息经过处理转变为用
户可看的定位信息,从而实现位置定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m os m os m os m os
AXL0
XA1L
( X Y Z ) T ( X 0Y 0Z 0 ) T ( dd X d Y ) T Z
观测到多颗卫星
~ ~1 2R R0 01 2ll1 2
m1 n1 m2 n2
1 1d d dZ Y X d dT T 1 2a a1 2ttm mo oss
用矩阵形式表示为:
V AX L
v11
l11 m11 n11 1 0 . 0 λ 0 . 0
.
.
.
.
...
.
..
.
v1n v21
l1n l21
m1n m21
n1n 1 0 . n21 0 1 .
0 0
0 0 . λ
λ 0 .
0
V ;A .
n1 n2 n3 n4
1 1 1 1d d d dZ Y Xt d d d dT T T T 1 4 3 2a a a a1 4 3 2ttttm m m mo o o ossss
l1 All3 2
l4
m 1 n1 m 2 n2 m 3 n3 m 4 n4
1 1 1,
1
Xd d d dZ Y X ,t L ~ ~ ~ ~1 4 3 2R R R R 0 0 0 0 1 4 3 2 d d d d1 4 3 2 T T T T a a a a 1 4 3 2tttt
N,E,H为站心坐标系下的坐标分量
DOP值与定位精度
mposURP ADOP 其中m, po为 s 位置中U 误R为 差 A用 ,户等效距
DOP值的性质 ➢DOP值与单点定位时,所观测卫星的数量 与分布有关,它所表示的是定位的几何条件 ➢DOP值越小,定位的几何条件越好
GPS单点定位计算过程
➢计算观测卫星的位置(Xi,Yi,Zi),卫星钟差dTi ,大气
GPS单点定位是指根
据卫星星历以及单台 GPS接收机观测值来 确定测站点在WGS84 坐标系中绝对坐标的 方法,也称为绝对定 位。
(XS,YS,ZS) Z
(X,Y,Z)
O(0,0,0)
Y X
优点:
➢一台接收机单独定位,观测简单, ➢可瞬时定位
缺点:
➢精度主要受系统性偏差的影响,定位精度低
应用领域 ➢低精度导航、资源普查、军事、...
R i 0
R i 0
R i 0
~ i R 0 i l i d m i d X n i d Y d Z d i t a iT ( i t 1 m , 2 , 3 , 4 )
~ ~ ~ ~1 4 3 2R R R R0 0 0 01 4 3 2llll1 4 ( t R G T P S _ G S) P C d S C t d δ T atm
R C d C td T atmos
~ ( X S X ) 2 ( Y S Y ) 2 ( Y S Y ) 2 C d C d t a T t
~ : 伪距观测值
( X S , Y S , Z S ) : 卫星坐标 ( X , Y , Z ) : 测站坐标 dt : 接收机钟差 dT : 卫星钟差 δatmos : 大气引起的误差
~1
(X1X)2(Y1Y)2(Z1Z)2
C
dtCd1T a
1 t mo s
~2
(X2X)2(Y2Y)2(Z2Z)2
CdtCd2T a
2 tmo
s
~3
(X3X)2(Y3Y)2(Z3Z)2
CdtCd3T a
3 tmo
s
~4
(X4X)2(Y4Y)2(Z4Z)2
CdtCd4T a
4 tmo
s
~ i ( X i X ) 2 ( Y i Y ) 2 ( Z i Z ) 2 C C d i a d ittm T o
《GPS原理及其应用》
《GPS原理及其应用》
第七讲 GPS定位的基本原理
GPS测量定位方法分类
定位模式
➢ 绝对定位(单点定位) ➢ 相对定位 ➢ 差分定位
定位时接收机天线的运动状态
➢ 静态定位:天线相对于地球坐标系静止 ➢ 动态定位:天线相对于地球坐标系运动 ➢ 准动态定位:搬站过程中保持信号连续观测
Q(ATA)1
qXX qXY qXZ qXt
Q
qY
X
qY Y
qY Z
qY
t
qZX qZY qZZ qZt
qtX
qtY
qtZ
qtt
GD q X O X q YP Y q Z Z q tt
PD q O X X q P Y Y q ZZ
TDO P qtt HD O qNN P qEE VDO PqHH
2、GPS单点定位的几何原理
观测两颗卫星
➢做两个球面 ➢两球面相交为一个圆 ➢测站位于圆上
(X1,Y1,Z1,)
(X2,Y2,Z2,)
R 1 (X 1 X )2 ( Y 1 Y )2 (Z 1 Z )2
R 2(X 2 X )2 ( Y 2 Y )2 (Z 2 Z )2
2、GPS单点定位的几何原理
平面后方交会方法回顾
在待测点上设站,向3个或3个以上已知点进行角 度观测,通过后方交会方法求出待测点的坐标。
1
2
3
2
1
2、GPS单点定位的几何原理
观测一颗卫星
(X,Y,Z,)
➢测站位于以卫星位置为球心, 站星距离为半径的球面上。
(X1,Y1,Z1,)
R 1(X 1 X )2 (Y 1 Y )2 (Z 1 Z )2
2、GPS单点定位的几何原理
GPS单点定位方法的实质是空间距离后方交会
➢观测一个站星距离 ➢观测两个站星距离
球面 圆
➢观测三个站星距离
两点
➢观测三个站星距离+地球
一点
3、GPS单点定位的求解
R1 (X1 X)2 (Y1 Y)2 (Z1 Z)2 R2 (X2 X)2 (Y2 Y)2 (Z2 Z)2 R3 (X3 X)2 (Y3 Y)2 (Z3 Z)2
如果某个历元观测了n颗卫星则 误差方程个数为:n 未知数个数为:(4+n)
是否可 解?
静态情况下k个历元里,每历元均观测了n颗相同的卫星
误差方程个数为:k×n
未知数个数为:3+k+n
什么情况 下可解?
k×n > (3+k+n)
误差方程式为:
V11 l11dX m11dY n11dZ Cdt1 N1 λ ρ011 φ11 λ CdT11 δ11 ... V1n l1ndX m1ndY n1ndZ Cdt1 Nn λ ρ01n φ1n λ CdT1n δ1n V21 l21dX m21dY n21dZ Cdt2 N1 λ ρ021 φ21 λ CdT21 δ21 ... V2n l2ndX m2ndY n2ndZ Cdt2 Nn λ ρ02n φ2n λ CdT2n δ21 Vk1 lk1dX mk1dY nk1dZ Cdtk N1 λ ρ0k1 φk1 λ CdTk1 δk1 ... Vkn lkndX mkndY nkndZ Cdtk Nn λ ρ0kn φkn λ CdTkn δkn
~n
R0n
ln
mn
nn
1dt
dT n
antmos
l1 A l2
ln
m 1 n1 m 2 n2 m n nn
1 1 1 ,X d d d dZ Y X ,tL ~ ~ ~1 n 2 R R R 0 0 0 1 n 2 d d d1 n 2 T T T a a a 1 n 2tttm m m o o os s s
GPS测量定位方法分类
获得定位结果的时效
➢事后定位 ➢实时定位
观测值类型
➢伪距测量 ➢载波相位测量
主要内容 单点定位 相对定位 差分GPS
§7.1 单点定位 ➢GPS单点定位的概念 ➢GPS单点定位的几何原理 ➢GPS单点定位的求解 ➢GPS单点定位小结
我在哪 里?
航空摄影摄区
1、GPS单点定位的概念
X2 Y2 Z2 Rearth
GPS卫星在“T”时刻发射信号
电离层
对流层
站星距离= △t×光速
GPS接收机于“T+△t”时刻接收到信号
由于大气误差的影响,GPS卫星钟和GPS接收机钟 都含有误差,造成星站距离观测值并非星站几何距离。
~Ctatmos C(tRTS)atmos
C (tR G ( P d S ) ( tT S _ G P d S ) T )atm os
给定待定点的初始坐标 (X0,Y0,Z0)
~ i R 0 i X iR 0 iX 0 d Y X iR 0 iY 0 d Y Z iR 0 iZ 0 d C Z C di t d a i tT m
R 0 i (X iX 0)2 (Y i Y 0)2 (Z iZ 0)2
Cdt CdiT
令 li : X iX 0, m iY i Y 0,n iZ i Z 0
已知: 卫星坐标 ( X S ,Y S , Z S ) 卫星钟差误差 dT 大气误差 δatmos
求: 测站坐标 ( X ,Y , Z ) 接收机钟差 dt
S1
S2
S3 S4
(X,Y,Z,dt)
~ 1 , ( X 1 ,Y 1 , Z 1 ), dT 1 ~ 2 , ( X 2 ,Y 2 , Z 2 ), dT 2 ~ 3 , ( X 3 ,Y 3 , Z 3 ), dT 3 ~ 4 , ( X 4 ,Y 4 , Z 4 ), dT 4
VA XL δX (A TA 1A )TL
m0
V TV n4
D δXm 0 2(A TA )1
( X Y Z ) T ( X 0 Y 0Z 0 ) T ( dd X d Y ) T Z