哈工大机械原理大作业连杆
哈工大机械原理大作业24题
班级1013102学号 6机械原理大作业说明书题目 1、连杆机构运动分析2、凸轮机构设计3、齿轮传动设计学生姓名1连杆机构运动分析1.设计题目:一、先建立如下坐标系:二、划分杆组如下,进行结构分析:该机构由I级杆组RR(如图1)、II级杆组RPR(如图2、3)和II级杆组RRP(如图4)组成。
(1)(2)(3)(4)三、运动分析数学模型:(1)同一构件上点的运动分析:如右图所示的原动件1,已知杆1的角速度=10/rad s ω,杆长1l =170mm,A y =0,A x =110mm 。
可求得下图中B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
θcos 1l xB =,θsin 1l yB =θωυsin 1l xB -=,θωυcos 1l yB =,222B2==-cos =-B xB i d x a l x dt ωϕω2222==-sin =-B yB i B d y a l y dtωϕω。
(2)RPRII 级杆组的运动分析:a. 如右图所示是由2个回转副和1个移动副组成的II 级组。
已知两个外运动副C 、B 的位置(B x 、B y 、c x =110mm 、C y =0)、速度(xB υ,yB υ,xC υ=0,yC υ=0)和加速度(0,0,,==yC xC yB xB a a a a )。
可确定下图中D 点的位置、速度和加速度。
确定构件3的角位移1ϕ、角速度1ω、角加速度1α。
1sin 31..ϕϕl x dtdx C B-= 1sin 131cos 13.....2ϕϕϕϕl l x dt x d C B --= 1cos 31..ϕϕl y dtdy C B+=1cos 131sin 13.....2ϕϕϕϕl l y dt y d C B +-= 根据关系:1111d 122..11.αϕϕωϕϕ====dtd dt , 故可得出:D x =)1cos(4βϕ++l x C D y =)1sin(4βϕ++l y Cb. 如右图所示是由2个回转副和1个移动副组成的II级组。
哈工大机械设计大作业平面连杆机构设计说明书
机械设计基础大作业计算说明书题目:平面连杆机构设计学院:材料学院班号:学号:姓名:日期:2014年9月30日哈尔滨工业大学机械设计基础大作业任务书题目:平面连杆机构设计设计原始数据及要求:3l (mm )=6030ψ=︒1.2K = 60CDA ∠=︒目录1设计题目 (1)2设计原始数据 (1)3设计计算说明书 (1)3.1计算极位夹角θ (1)3.2设计制图 (1)γ (2)3.3验算最小传动角4参考文献 (2)1 设计题目平面连杆机构的图解法设计2 设计原始数据设计一曲柄摇杆机构。
已知摇杆长度3l ,摆角ψ ,摇杆的行程速比系数K ,要求摇杆CD 靠近曲柄回转中心A 一侧的极限位置与机架间的夹角为CDA ∠ ,试用图解法设其余三杆的长度,并检验(测量或计算)机构的最小传动角γ 。
3l (mm )=60 30ψ=︒1.2K = 60CDA ∠=︒3 设计计算说明书3.1 计算极位夹角θ 极位夹角11801K K θ-=︒+ 代入数值 1.211800.09118016.41.21θ-=︒=︒=︒+ 3.2 设计制图3.2.1 在图纸上取一点作为D 点,从D 点垂直向上引出一条长为60mm 的线段,终点为2C ;3.2.2 从D 点在2C D 左侧引出一条与2C D 夹角为30︒的射线;3.2.3 以D 点为圆心,以2C D 为半径画圆,与射线交于点1C ;3.2.4 分别从1C 、2C 两点向下引两条射线,射线与12C C 夹角为73.6︒,两射线交于O 点,O 点即为曲柄的回转中心;3.2.5 以O 点为圆心以1OC 为半径画圆;3.2.6 过点D 向左侧引出一条射线,射线与1C D 夹角60︒,与圆交于点A ;3.2.7 连接1AC ,2AC 并量取其长度,以12||AC AC l l - 为半径画圆,直线1AC ,2AC 与圆的交点分别为1B ,2B ;3.2.8 在图中量取112AB mm =,1170B C mm = ,57AD mm =3.3 验算最小传动角γ3.3.1 在1C 处根据余弦定理2222221111586057cos 0.534225860AC C D AD AC C D γ+-+-=== 57.7γ=︒3.3.2 在2C 处根据余弦定理2222222222826057cos 0.722228257AC C D AD AC C D γ+-+-=== 43.8γ=︒所以最小传动角43.8γ=︒4 参考文献[1]宋宝玉,王瑜,张锋主编.机械设计基础.哈尔滨:哈尔滨工业大学出版,2010.[2]王瑜主编.机械设计基础大作业指导书.哈尔滨:哈尔滨工业大学出版社,2014.。
哈工大机械原理考研-第2章 连杆机构分析与设计(理论部分)

第2章连杆机构分析和设计2.1内容要求1.掌握平面四杆机构的基本型式、特点及其演化方法。
2.熟练掌握和推导铰链四杆机构曲柄存在条件,并灵活运用来判断铰链四杆机构的类型;掌握曲柄滑块机构及导杆机构等其他四杆机构的曲柄存在条件的推导过程。
3.掌握平面四杆机构的压力角、传动角、急回运动、极位夹角、行程速比系数、等基本概念;掌握连杆机构最小传动角出现的位置及计算方法;掌握极位夹角与行程速比系数的关系式;掌握掌握死点在什么情况下出现及死点位置在机构中的应用。
4.掌握速度瞬心的概念及如何确定机构中速度瞬心的数目;掌握“三心定理”并应用“三心定理”确定机构中速度瞬心的位置及对机构进行速度分析。
5.了解建立Ⅰ级机构、RRR杆组、RRP杆组、RPR杆组、PRP杆组、RPP杆组的运动分析数学模型;掌握相对运动图解法及杆组法机构运动分析的方法。
6.掌握移动副、转动副中摩擦力的计算和自锁问题的讨论;掌握计及摩擦时平面连杆机构受力分析的方法;掌握计算机械效率的几种方法;掌握从机械效率的观点研究机械自锁条件的方法和思想。
7.掌握平面四杆机构的运动特征及其设计的基本问题;了解“函数机构”、“轨迹机构”、“导引机构”的设计思想、方法;掌握按给定行程速比系数设计四杆机构的方法。
2.2内容提要一、本章重点本章重点是铰链四杆机构曲柄存在条件,并灵活运用来判断铰链四杆机构的类型;连杆机构最小传动角出现的位置及计算方法;速度瞬心法对机构进行速度分析;计及摩擦时平面连杆机构受力分析的方法;按给定行程速比系数设计四杆机构的方法。
1.平面四杆机构的基本型式及其演化型式平面四杆机构的基本型式是平面铰链四杆机构。
在此机构中,与机架相联的构件称为连架杆;能作整周回转的连架杆称为曲柄,而不能作整周回转的连架杆称为摇杆;与机架不相连的中间构件称为连杆。
能使两构件作整周相对转动的转动副称为周转副;而不能作整周相对转动的转动副称为摆转副。
平面铰链四杆机构又根据两连架杆运动形式不同分为曲柄摇杆机构、双曲柄机构及双摇杆机构。
机械原理大作业一连杆机构参考例子
机械原理大作业课程名称:机械原理设计题目:机械原理大作业院系:汽车工程学院车辆工程班级:1101201姓名:。
学号:。
指导教师:游斌弟大作业1 连杆机构运动分析1、运动分析题目如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
图 12、对机构进行结构分析该机构由I 级杆组RR (原动件1)、II 级杆组RRR (杆2、杆3)和II 级杆组RPR (滑块4及杆5)组成。
I 级杆组RR ,如图2所示;II 级杆组RRR ,如图3所示;II 级杆组RPR ,如图4所示。
图2 图 2图4 3、建立坐标系建立以点A为原点的固定平面直角坐标系4、各基本杆组运动分析的数学模型(1)同一构件上点的运动分析:如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ω,AB 杆长i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
=cos =280cos B i x l ϕϕ; =sin =280sin B i y l ϕϕ;图 3==-sin =-BxB i B dx v l y dt ωϕω; ==cos =;B yB i B dyv l x dt ωϕω222B 2==-cos =-BxB i d x a l x dt ωϕω;2222==-sin =-ByB i Bd y a l y dtωϕω。
图 4(2)RRRII 级杆组的运动分析如图6所示是由三个回转副和两个构件组成的II 级组。
已知两杆的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度( xB yB xD yD v v v v 、、、 ) 图6和加速度(xB yB xD yD a a a a 、、、)。
工大机械原理大作业 连杆7

Harbin Institute of Technology机械原理大作业一课程名称:机械原理设计题目:凸轮机构设计院系:机电学院班级:分析者:学号:指导教师:陈明、丁刚设计时间:20130703哈尔滨工业大学一、连杆机构运动分析题目如图1-7所示是曲柄摇块机构,曲柄长度为a ,机架长度为d ,点m 到铰链B 的距离是m l ,点n 到m 的距离是n l 。
试研究a 、d 、m l 、n l 的长度变化对n 的轨迹影响规律。
二、建立坐标系三、机构的结构分析,组成机构的基本杆组划分该机构由机架、一个原动件AB 和一个个II 级杆组组成。
原动件II 级杆组RPR四、 各基本杆组的运动分析数学模型1、原动件AB 的数学模型以点C 为原点则⎪⎩⎪⎨⎧==0y x AA d⎪⎩⎪⎨⎧+=+=ααsin cos a a y y x x AB A B 2、II 级杆组RPR 的数学模型⎪⎩⎪⎨⎧+-=--=θθθθcos sin sin cos l l y y l l x x n mB n n m B n 其中:BCBC y xBB==θθsin cos 五、计算编程利用MATLAB 软件进行编程,程序如下:1、当d=100,lm=40,ln=50时a 的变化对轨迹的影响fi=linspace(0,2*pi,100); d=[100 100 100 100]; a=[ 20 30 40 50]; lm=[ 40 40 40 40]; ln=[50 50 50 50]; xc=[0 0 0 0]; yc=[0 0 0 0]; xa=[d]; ya=[0 0 0 0]; for i=1:length(d)xb=xa(i)+a(i)*cos(fi); yb=ya(i)+a(i)*sin(fi);l2=sqrt(d(i)^2+a(i)^2+2*d(i)*a(i)*cos(fi))-lm(i); coss=(d(i)+a(i)*cos(fi))./(lm(i)+l2); sins=(a(i)*sin(fi))./(l2+lm(i)); xn=xb-lm(i)*coss-ln(i)*sins; yn=yb-lm(i)*sins+ln(i)*coss; plot(xn,yn);hold on; axis equal; end2、当a=40,lm=40,ln=50时d的变化对轨迹的影响fi=linspace(0,2*pi,100);d=[50 70 120 150];a=[ 30 30 30 30];lm=[ 40 40 40 40];ln=[50 50 50 50];xc=[0 0 0 0];yc=[0 0 0 0];xa=[d];ya=[0 0 0 0];for i=1:length(d)xb=xa(i)+a(i)*cos(fi);yb=ya(i)+a(i)*sin(fi);l2=sqrt(d(i)^2+a(i)^2+2*d(i)*a(i)*cos(fi))-lm(i); coss=(d(i)+a(i)*cos(fi))./(lm(i)+l2);sins=(a(i)*sin(fi))./(l2+lm(i));xn=xb-lm(i)*coss-ln(i)*sins;yn=yb-lm(i)*sins+ln(i)*coss;plot(xn,yn);hold on;axis equal;end3、当d=100,a=40, =40,ln=50时lm的变化对轨迹的影响fi=linspace(0,2*pi,100);d=[100 100 100 100];a=[ 30 30 30 30];lm=[ 20 30 40 50];ln=[50 50 50 50];xc=[0 0 0 0];yc=[0 0 0 0];xa=[d];ya=[0 0 0 0];for i=1:length(d)xb=xa(i)+a(i)*cos(fi);yb=ya(i)+a(i)*sin(fi);l2=sqrt(d(i)^2+a(i)^2+2*d(i)*a(i)*cos(fi))-lm(i);coss=(d(i)+a(i)*cos(fi))./(lm(i)+l2);sins=(a(i)*sin(fi))./(l2+lm(i));xn=xb-lm(i)*coss-ln(i)*sins;yn=yb-lm(i)*sins+ln(i)*coss;plot(xn,yn);hold on;axis equal;end4、当d=100,a=40, ,lm=40时ln的变化对轨迹的影响fi=linspace(0,2*pi,100);d=[100 100 100 100];a=[30 30 30 30];lm=[40 40 40 40];ln=[0 50 80 110];xc=[0 0 0 0];yc=[0 0 0 0];xa=[d];ya=[0 0 0 0];for i=1:length(d)xb=xa(i)+a(i)*cos(fi);yb=ya(i)+a(i)*sin(fi);l2=sqrt(d(i)^2+a(i)^2+2*d(i)*a(i)*cos(fi))-lm(i); coss=(d(i)+a(i)*cos(fi))./(lm(i)+l2);sins=(a(i)*sin(fi))./(l2+lm(i));xn=xb-lm(i)*coss-ln(i)*sins;yn=yb-lm(i)*sins+ln(i)*coss;plot(xn,yn);hold on;axis equal;end5、 a, d, lm , ln都变化时fi=linspace(0,2*pi,100);d=[50 70 120 150];a=[20 30 40 50];lm=[20 30 40 50];ln=[0 50 80 110];xc=[0 0 0 0];yc=[0 0 0 0];xa=[d];ya=[0 0 0 0];for i=1:length(d)xb=xa(i)+a(i)*cos(fi);yb=ya(i)+a(i)*sin(fi);l2=sqrt(d(i)^2+a(i)^2+2*d(i)*a(i)*cos(fi))-lm(i); coss=(d(i)+a(i)*cos(fi))./(lm(i)+l2);sins=(a(i)*sin(fi))./(l2+lm(i));xn=xb-lm(i)*coss-ln(i)*sins;yn=yb-lm(i)*sins+ln(i)*coss;plot(xn,yn);hold on;axis equal;end六、结果分析从matlab图像我们可以看出n点的轨迹是封闭图形其随a, d, lm , ln的变化而变化。
哈工大机械原理大作业1

[键入公司名称]机械原理课程设计[键入文档副标题]p[选取日期]设计题目连杆机构运动分析机电工程学院1008103班H100811109学号设计者王鹏[在此处键入文档的摘要。
摘要通常是对文档内容的简短总结。
在此处键入文档的摘要。
摘要通常是对文档内容的简短总结。
]1、运动分析题目(12)如图所示的六杆机构中,各构件的尺寸分别为:l AB=200mm ,l BC=500mm ,l CD=800mm ,x F= 400mm ,x D=350mm ,y D=350mm ,ω=100rad s⁄,求构件5上点F的位移,速度和加速度。
2、建立坐标系建立以点A为原点的固定平面直角系A−x,y3、对机构进行结构分析该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组PRP(滑块4及滑块5)组成。
I级杆组RR,如图2所示;II级杆组RRR,如图2所示;II级杆组PRP,如图3所示。
4、确定已知参数和求解流程图1所示,规定当φ=10° 时,F 点纵坐标为0 (1)如图2所示,已知原动件杆1的转角,φ=0~360° {x B =l AB ×cos φy B =l AB ×sin φ(2)如图3所示,已知B ,D 两点坐标分别为(x B ,y B )(x D ,y D )和 l BC l CD利用方程组{(x −x B )2+(y −y B )2=l BC 2(x −x D )2+(y −y D )2=l CD2 可以求解出C 点坐标(3)如图4所示,已知C 点坐标、x F 、x D 、y D利用几何关系可以求解出E 点坐标同时,当φ=10° 时,可以求出杆EF 长,记为 l EF进而,可以求出F 点坐标,即F 点位移(4)利用导数的定义与其物理意义v n =s n+h −s n−h2ha n =s n+h −2s n +s n−hh 2利用上述公式,选取适当的步长h ,利用F 点位移就可以得出速度与加速度5、用VC 编程#include <stdio.h>#include <math.h>#define pi 3.14159265358979323846//定义全局变量double Lab,Lbc,Lcd,Xf,Xd,Yd;//定义已知位置量double Wab;//定义角速度量//定义被调用函数void Ccorner (double *a,double *b,double c);//声明C点坐标函数求解函数void Pcorner (double *a,double *b,double c,double d,double e);//声明P点坐标函数求解函数double Kcd (double a,double b);//声明CD直线倾斜角求解函数//主函数main (){Lab=0.200;Lbc=0.500;Lcd=0.800;Xf=0.400;Xd=0.350;Yd=0.350;//赋位置量值Wab=100;//赋角速度值//未知几何与位置参量double Xb,Yb;//定义B点坐标double Xc,Yc;//定义C点坐标double Ye;//定义E点纵坐标double Xp,Yp;//定义瞬心p点坐标double Lef;//定义bp,cp,ef,bd杆长double Yf[720];//定义F点纵坐标//未知速度参量double Vf[720];//定义EF杆速度//未知加速度参量double Af[720];//定义加速度//其余参量double o=10*pi/180,k,k1;//主动杆角度变量与CD杆倾斜角double t=1*pi/180/100;//时间参量,用定义法求速度与加速度int i;//循环控制变量//主函数主体//求位移量for (i=0;i<=361;i++){//准备几何量Xb=Lab*cos(o), Yb=Lab*sin(o);Ccorner (&Xc,&Yc,o);//求C点坐标Pcorner (&Xp,&Yp,Xc,Yc,o);//求瞬心P点坐标k=Kcd (Xp,Yp);//求CD杆倾斜角//求解位移量(规定主动杆10度为Yf零点)if (i==0){k1=k;}Lef=tan(k1)*Xd+Yd;//ef杆长Ye=tan(k)*Xd+Yd;Yf[i]=Ye-Lef;o=o+1*pi/180;}//用定义求速度for (i=1;i<=361;i++){Vf[i]=(Yf[i+1]-Yf[i-1])/(2*t);}//用定义求加速度for (i=1;i<=361;i++){Af[i]=(Yf[i+1]-2*Yf[i]+Yf[i-1])/pow(t,2);}//输出语句for (i=1;i<=180;i++){printf ("%d,%lf,%lf,%lf,\t",i+10,Yf[i]*1000,Vf[i],Af[i]);printf ("%d,%lf,%lf,%lf\n",i+190,Yf[i+180]*1000,Vf[i+180],Af[i+180]); }}//C点坐标值函数void Ccorner(double *a,double *b,double c)//&Xc,&Yc,o{double i,j,x,y,z;//中间参数i=(pow(Lcd,2)-pow(Lbc,2)+pow(Lab*sin(c),2)-pow(Yd,2)+pow(Lab*cos(c),2)-pow((Xd+Xf),2))/(2*(Lab*cos(c)-Xd-Xf));j=(Lab*sin(c)-Yd)/(Lab*cos(c)-Xf-Xd);x=pow(j,2)+1;y=2*(Xf+Xd)*j-2*i*j-2*Yd;z=pow(i,2)-2*(Xf+Xd)*i+pow((Xf+Xd),2)+pow(Yd,2)-pow(Lcd,2);*b=(-y+sqrt(pow(y,2)-4*x*z))/(2*x);*a=i-j*(*b);}//求瞬心P点坐标函数void Pcorner(double *a,double *b,double c,double d,double e)//&Xp,&Yp,Xc,Xp,o{double a1,b1,c1,a2,b2,c2,i,j,k;//中间参量a1=tan(e),a2=(d-Yd)/(c-Xd-Xf);b1=b2=-1;c1=0,c2=(c*(d-Yd)/(c-Xd-Xf))-d;i=a1*b2-b1*a2;j=c1*b2-b1*c2;k=a1*c2-c1*a2;*a=j/i;*b=k/i;}//CD杆倾斜角double Kcd(double a,double b)//Xp,Yp{double k1;//中间参量k1=-atan ((b-Yd)/(a-Xd-Xf));return k1;}6、计算结果(程序计算结果附在图像之后)6.1位移、速度、加速度的图像点F的位移线图如图5所示。
哈尔滨工业大学机械原理大作业凸轮设计
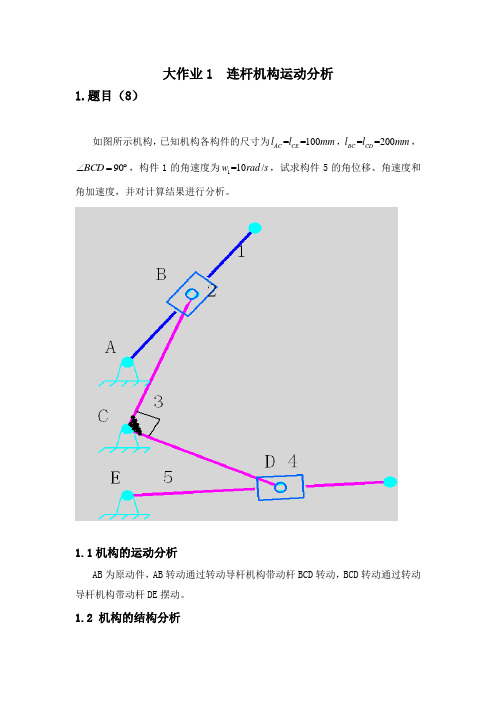
大作业1连杆机构运动分析1.题目(8)如图所示机构,已知机构各构件的尺寸为==100AC CE l l mm ,==200BC CD l l mm ,90BCD ∠=︒,构件1的角速度为1=10/w rad s ,试求构件5的角位移、角速度和角加速度,并对计算结果进行分析。
1.1机构的运动分析AB 为原动件,AB 转动通过转动导杆机构带动杆BCD 转动,BCD 转动通过转动导杆机构带动杆DE 摆动。
1.2 机构的结构分析杆组可以划分为一个RR I级杆组(杆1)、RRPII级杆组(滑块2,杆3)、RPRII 级杆组(滑块4,杆5)(1)RRI级杆组1:(2)RRPII级杆组2,3:(3)RPRII级杆组4,5:2.分析过程 2.1 建立坐标系建立以点E 为原点的固定平面直角坐标系x-E-y ,如图所示。
2.2 建立数学模型(1)构件1、2、3的分析原动件杆1的转角:1θ=0--360。
原动件杆1的角速度:1ω=.1θ=10/rad s 原动件杆1的角加速度:..1αθ==0运动副A 的坐标:0200A A x y mm =⎫⎬=⎭运动副A 的速度及加速度都为零。
构件1为BC (RRP Ⅱ级杆组)上滑块B 的导路 滑块B 的位置为:132cos cos B A C x x s x l θθ=+=+132sin sin B A C y y s x l θθ=+=+消去s,得:0212arcsinA l θθ=+式中:011()sin ()cos C A C A A x x y y θθ=---构件3的角速度i ω和滑块B 沿导路的移动速度D υ:.211213(Q sin Q cos )/Q ωϕθθ==-+ 1322323(Q cos Q sin )/Q D s l l υθθ⋅==-+式中:..11111211321212Q sin ;Q cos ;Q sin sin cos sin l l l θθθθθθθθ=-==+构件3的角加速度和滑块B 沿导路移动的加速度:..241513(Q sin Q cos )/Q αθθθ==-+..4325323(Q cos Q sin )/Q B s l l υθθ==-+式中:122......21142211111Q cos sin cos 2sin l l l s θθθθθθθθ=---- 122......21152211111Q sin cos sin 2cos l l l s θθθθθθθθ=+-+(2)构件3,4,5的分析构件3,4,5,由1个Ⅰ级基本杆组和一个RRP Ⅱ级杆组组成,与构件1,2,3结构相同,只运动分析过程与其相反。
机械原理大作业1连杆机构27题8页word

大作业1 连杆机构运动分析1、运动分析题目如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2、建立坐标系建立以点A 为原点的固定平面直角坐标系图 13、对机构进行结构分析该机构由I 级杆组RR (原动件1)、II 级杆组RRR (杆2、杆3)和II 级杆组RPR (滑块4及杆5)组成。
I 级杆组RR ,如图2所示;II 级杆组RRR ,如图3所示;II 级杆组RPR ,如图4所示。
图 2 图 3 图 44、各基本杆组运动分析的数学模型(1)同一构件上点的运动分析:图 5如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ω,AB 杆长i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
(2)RRRII 级杆组的运动分析:图 6如图6所示是由三个回转副和两个构件组成的II 级组。
已知两杆的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。
求内运动副C 的位置(C C x 、y )、速度(xC yC v 、v )、加速度(xC yC a 、a )以及两杆的角位置(23ϕϕ、)、角速度(23ϕϕ、)和角加速度(23ϕϕ、)。
1)位置方程为求解上式,应先求出2ϕ或3ϕ,将上式移相后分别平方相加,消去3ϕ得式中:02=2(x -x )B D A l 02=2(-)B D B l y y 222023=+-BD C l l l其中,BD l 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Harbin Institute of Technology
机械原理大作业一
课程名称: 机械原理
设计题目: 连杆机构运动分析
院 系: 机电工程学院
班 级:
设 计 者:
学 号:
指导教师:
设计时间:
1.运动分析题目
(11)在图所示的六杆机构中,已知:
AB
l
=150mm, ACl=550mm, BDl=80mm, DEl=500mm,曲柄以等角速度1w=10rad/s沿逆时针方向
回转,求构件3的角速度、角加速度和构件5的位移、速度、加速度。
2.机构的结构分析
建立以点A为原点的固定平面直角坐标系A-x, y,如下图:
机构结构分析
该机构由Ⅰ级杆组RR(原动件1)、Ⅱ级杆组RPR(杆2及滑块3)和Ⅱ级杆组RRP
(杆4及滑块5)组成。
3.建立组成机构的各基本杆组的运动分析数学模型
原动件1(Ⅰ级杆组RR)
由图所示,原动件杆1的转角a=0-360°,角速度1w=10rad/s,角加速度1a=0,运动
副A的位置坐标Ax=Ay=0,速度
(A,
A),
加速度
(A
,
A),
原动件1的长度ABl=150mm。
求出运动副B的位置坐标(Bx, By)、速度
(B
,B)
和加速度
(B
,
B)。
杆2、滑块3杆组(RPRⅡ级杆组)
已出运动副B的位置(Bx, By)、速度
(B
,B)
和加速度
(B
,
B),
已知运动副C的位置坐标Cx=0, Cy=550mm,速度,加速度,杆长ACl=550mm。
求出构件2的转角b,角速度2w和角加速度2a.
构件二上点D的运动
已知运动副B的位置(Bx, By)、速度
(B
,
B)、
加速度
(B
,
B),
已经求出构件2的转角b,角速度2w和角加速度2a,杆BD的长度BDl=80mm。
根据Ⅰ级杆组RR的运动分析数学模型求出点D的位置坐标(Dx,Dy)、速度
(D
,D)
和加速度
(D
,
D)。
构件4、5杆组(RRPⅡ级杆组)
已求出运动副D的位置坐标(Dx,Dy)、速度
(D
,D)
和加速度
(D
,
D),
已知滑块5导路参考点K的位置坐标Kx=0, Ky=0,参考点K的位置角c=0,速度
,加
速度
。
求出滑块5的位置s(Ex,Ey)、速度v
(E
,E)
和加速度
a(E
,E)
曲线。
4.用C语言编程
#include <>
#include <>
#define PI
main()
{
double lAB=,lAC=,lBD=,lDE=,w1=10;/*各杆长度、位置尺寸以及原动件角速度*/
double a,b,c,d,e,f;/*机架间角度*/
double lBC,lAD,lAE;/*任意瞬时BC、AD、AE间距离*/
double w2,w3,w4;/*杆1、滑块3、杆4角速度*/
double a2,a3,aB,aE;/*杆2、滑块3角加速度以及B、E点加速度*/
double xE,yE=0,rE,vB,vDB,vCr,vE;/*E点位置以及B、C、D、E点速度*/
printf("滑块E和滑块C的运动数据:\n");
for (f=0;f<=(2*PI+PI/9);f=f+(PI/9))/*角度a以20度间隔变化一周*/
{
vB=w1*lAB;/*B点速度*/
lBC=pow(lAB*lAB+lAC*lAC-2*lAB*lAC*sin(f),;/*任意瞬时B、C两点间距离*/
a=acos((lAC*lAC+lBC*lBC-lAB*lAB)/(2*lAC*lBC));/*杆2与竖直方向的夹角*/
lAD=pow(lAB*lAB+lBD*lBD+2*lAB*lBD*cos(a+f-(PI)/6),;/*任意瞬时A、D两点间距离
*/
b=acos((lAB*lAB+lAD*lAD-lBD*lBD)/(2*lAB*lAD));/*任意瞬时角度b的值*/
lAE=lAD*cos(f-b)+pow(lDE*lDE-lAD*lAD*sin(f-b)*sin(f-b),;/*任意瞬时A、E两点间
距离*/
c=acos((lAE*lAE+lDE*lDE-lAD*lAD)/(2*lAE*lDE));/*任意瞬时角度c的值*/
d=acos((lAD*lAD+lDE*lDE-lAE*lAE)/(2*lAD*lDE));/*任意瞬时角度d的值*/
e=acos((lBD*lBD+lAD*lAD-lAB*lAB)/(2*lAD*lBD));/*任意瞬时角度e的值*/
xE=lAB*cos(f)+lDE*cos(c)+lBD*cos(PI/6-a);/*点E在X轴上的分量*/
rE=pow((xE*xE+yE*yE),;/*任意时刻点E距A点的距离*/
vCr=-vB*cos(a+f);/*任意瞬时滑块C相对于杆2的速度*/
w2=-vB*sin(a+f)/lBC;/*任意瞬时杆2的角速度*/
w3=w2;/*任意瞬时滑块3的角速度*/
vDB=w2*lBD;/*任意瞬时点D相对于点B的速度*/
vE=-(vDB*sin(e+d)+vB*sin(f)*cos(c)+vB*cos(f)*sin(c))/(cos(c));/*任意瞬时E点
的速度*/
w4=(vDB*cos(d+c+e)-vB*cos(f))/(lDE*cos(c));/*任意瞬时杆4的角速度*/
aB=w1*w1*lAB;/*任意瞬时B点的加速度*/
a2=(-aB*cos(a+f)-2*w2*vCr)/lBC;/*任意瞬时杆2的角加速度*/
a3=a2;/*任意瞬时杆2的角加速度*/
aE=(-w4*w4*lDE-a2*lBD*sin(d+e)+w2*w2*lBD*cos(d+e)+aB*sin(f)*sin(c)-aB*cos(f)
*cos(c))/cos(c);/*任意瞬时点E的加速度*/
printf("%lf\t%lf\t%lf\t%lf\t%lf\t%lf\n",f,rE,vE,aE,w3,a3);
}
}
5.绘制运动轨迹、运动线图,并作相应分析。
滑块3的运动线图
A.角速度3w (2w) 随角度a的变化
B.加速度3a (2a)随角度a的变化
滑块5的运动轨迹
滑块5的运动线图
A.位移Er随角度a的变化
B.速度Ev随角度a的变化
C.加速度Ea随角度a的变化
滑块E的运动数据:
滑块C的运动数据: