codesys脉冲定位指令
codesys 编程使用指南

codesys 编程使用指南Codesys是一种常用的编程工具,用于开发和编写嵌入式系统的控制程序。
本文将为读者提供一份Codesys编程使用指南,帮助初学者快速入门并掌握基本的编程技巧。
一、Codesys简介Codesys是一种基于IEC 61131-3标准的集成开发环境(IDE),支持多种编程语言,包括结构化文本(ST)、图表(IL)、功能块图(FBD)、连续功能图(CFC)和顺序功能图(SFC)。
它可以在不同的硬件平台上运行,并与多种通信协议兼容。
二、Codesys安装和配置1. 下载Codesys软件并按照安装向导进行安装。
2. 打开Codesys软件,选择合适的硬件平台和通信协议。
3. 配置硬件设备的参数,如IP地址、端口号等。
4. 创建一个新项目,选择编程语言和存储位置。
三、Codesys编程基础1. 了解IEC 61131-3编程规范,熟悉不同的编程语言和它们的特点。
2. 学习如何声明和定义变量,包括数据类型、范围和初始值。
3. 掌握条件语句(如if-else)和循环语句(如for和while),用于控制程序的流程。
4. 学习如何定义和调用函数块,实现代码的模块化和重用。
5. 掌握如何使用定时器和计数器,实现定时任务和计数功能。
6. 学习如何处理错误和异常情况,编写健壮的程序代码。
7. 熟悉调试工具和技巧,能够有效地定位和修复程序中的错误。
四、Codesys高级编程技巧1. 学习如何使用结构体和数组,组织和管理复杂的数据结构。
2. 掌握面向对象编程(OOP)的基本概念和技巧,提高代码的可维护性和重用性。
3. 学习如何与外部设备进行通信,包括传感器、执行器和其他控制系统。
4. 了解代码优化和性能调优的技术,提高程序的执行效率和响应速度。
5. 学习如何进行版本控制和团队协作,保证多人开发的代码质量和一致性。
五、Codesys实例应用1. 开发一个简单的闹钟程序,实现定时提醒功能。
2. 设计一个温度控制系统,根据温度传感器的数值调整加热器的功率。
codesys 指令系统

codesys 指令系统一、操作块 Operator1、IEC Operators:运算符::ADD:加法:MUL:乘:SUB:减:DIV:除:MOD :求余:2、Bitstring Operators:逻辑操作::AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作::SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: 选择: G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE:小于等于:GE:大于等于:EQ:等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作::CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT等:TIME_,/TIME_OF_DAY :时间转型::STRING/DW ORD/SINT 等:DATE_,/DT_, :日期转型::BOOL/INT/BYTE/ST RING 等:STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能:: ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN:正切:ASIN:反弦:ACOS:反余弦:ATAN:反正切: EXPT:求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT:左取位:RIGHT:右取位:MID :中间取位:CONCAT :字符串叠加: INSERT:插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG:上升沿保持:F_TRIG:下降沿保持:1.3,Counter :计数器::CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数:1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:一、操作块 Operator1、IEC Operators:运算符::ADD :加法:MUL :乘:SUB :减:DIV :除:MOD :求余:2、Bitstring Operators:逻辑操作:: AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作:: SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE :小于等于:GE :大于等于:EQ :等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作:: CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT 等:TIME_,/TIME_OF_DAY :时间转型::STRING/DWORD/SINT 等: DATE_,/DT_, :日期转型::BOOL/INT/BYTE/STRING 等: STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能::ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN :正切:ASIN :反弦:ACOS :反余弦:ATAN :反正切:EXPT :求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT :左取位:RIGHT :右取位:MID :中间取位:CONCAT :字符串叠加:INSERT :插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG :上升沿保持:F_TRIG :下降沿保持:1.3,Counter :计数器:: CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数: 1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:。
codesys 指令系统
codesys 指令系统一、操作块 Operator1、IEC Operators:运算符::ADD:加法:MUL:乘:SUB:减:DIV:除:MOD :求余:2、Bitstring Operators:逻辑操作::AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作::SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: 选择: G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE:小于等于:GE:大于等于:EQ:等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作::CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT等:TIME_,/TIME_OF_DAY :时间转型::STRING/DW ORD/SINT 等:DATE_,/DT_, :日期转型::BOOL/INT/BYTE/ST RING 等:STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能:: ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN:正切:ASIN:反弦:ACOS:反余弦:ATAN:反正切: EXPT:求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT:左取位:RIGHT:右取位:MID :中间取位:CONCAT :字符串叠加: INSERT:插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG:上升沿保持:F_TRIG:下降沿保持:1.3,Counter :计数器::CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数:1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:一、操作块 Operator1、IEC Operators:运算符::ADD :加法:MUL :乘:SUB :减:DIV :除:MOD :求余:2、Bitstring Operators:逻辑操作:: AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作:: SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE :小于等于:GE :大于等于:EQ :等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作:: CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT 等:TIME_,/TIME_OF_DAY :时间转型::STRING/DWORD/SINT 等: DATE_,/DT_, :日期转型::BOOL/INT/BYTE/STRING 等: STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能::ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN :正切:ASIN :反弦:ACOS :反余弦:ATAN :反正切:EXPT :求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT :左取位:RIGHT :右取位:MID :中间取位:CONCAT :字符串叠加:INSERT :插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG :上升沿保持:F_TRIG :下降沿保持:1.3,Counter :计数器:: CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数: 1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:。
codesys所有函数的详细说明.
二、模拟量标定库AnalogFilter Library模拟量标定库就是指AnalogFilter.lib中的一些库函数。
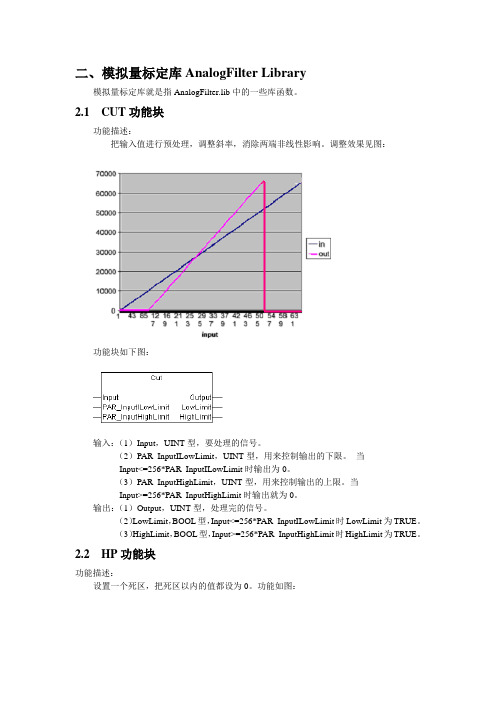
2.1 CUT功能块功能描述:把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:功能块如下图:输入:(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为0。
输出:(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2 HP功能块功能描述:设置一个死区,把死区以内的值都设为0。
功能如图:功能块如下图:输入:(1)Input,UINT型,输入信号。
. (2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=65535*PAR_CutLimit%时输出为0。
输出:(1)Output,UINT型,处理完的信号。
2.3 JoyFilter功能块功能描述:JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:输入:(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
竞赛定位控制指令

步进 电机
电源 限位
丝杆
滑
电源
台
限位
原点位
M104
[S1.] [S2.] [S3.] [D.]
[ZRN K1000 K100 X004 Y000]
• 1)[S1]:指定开始原点回归的速度。16位运算时 设定范围:10~32767 Hz;32位运算时设定范围 :10~100,000Hz;
• 2)[S2]:指定爬行速度,接近点(DOG)信号 ON后的低速。设定范围:10~32767 Hz;
M8050为ON时,输 入中断I00□中断禁 止
M8057(定时中断)I7□□禁止
M8058(定时中断)I8□□禁止
中断指令的梯形图如下图所示:
从图中可看出,主 程序中允许中断指 令EI及不允许中断 指令DI间的以开放 中断的程序段。主 程序带有多个中断 子程序时,中断标 号和距其最近的一 处中断返回指令构 成一个中断子程序 。FX2N系列PLC可实 现不多于二级的中
•中断受中断禁止特殊辅助继电器M8050~M8059的控制。
输入中断
输入中断指针
中断禁 止
I00□ (X0) I10□ (X1) I20□ (X2) I30□ (X3) I40□ (X4) I50□ (X5)
M8050 M8051 M8052 M8053 M8054 M8055
□=1时上升 沿中断
❖ 中断返回
X0
FNC03 IRET
开中断 FNC04 EI
关中断 FNC05 DI ❖ 均无操作数 ❖ 梯形图
X10
I100
EI DI FEND
IRET
开中断范围 中断子程序1
I101
中断子程序2
IRET
codesys指令系统
codesys 指令系统一、操作块 Operator1、IEC Operators:运算符 ::ADD:加法 :MUL:乘:SUB: 减:DIV: 除:MOD :求余 :2、Bitstring Operators:逻辑操作 ::AND :与:OR : 或:XOR :异或 :NOT :非:3、Bit-shift Operators: 移位操作 ::SHL : 左移 :SHR :右移 :ROL : 循环左移 :ROR :循环右移 :4、Selection Operators: 选择操作 :: 选择 : G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值 :MIN : 最小值 :LIMIT : 比较选择 ::IN>MAX:OUT:=MAX;IN<MIN :OUT:=MI N;MUX :多路选择 ::OUT:=MUX(IN0,⋯,INk,⋯INn); OUT:=Ink;5、Comparison Operators: 比较运算 ::GT : 大于 :LT : 小于 :LE:小于等于 :GE:大于等于 :EQ:等于 :NE : 不等于 :6、Address Operators: 地址 ::ADR7、Calling Operators:调用操作 ::CAL8、Type Conversion Functions :转型功能 ::BOOL_, : 布尔值转型 : :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL : 转型成布尔值 ::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL : 整数类型转换 :REAL_,/LREAL_, : 实数型 / 长实数型转型 ::INT等:TIME_,/TIME_OF_DAY 时:间转型 ::STRING/DW ORD/SINT 等 :DATE_,/DT_, : 日期转型 ::BOOL/INT/BYTE/ST RING 等:STRING_, : 字符串转型 ::BOOL/WORD/TIME 等:TRUNC :取整 :9、Numeric Functions : 数据计算功能 ::ABS : 取绝对值 :SQRT :开方 :LN : 取自然对数 :LOG :取对数 :EXP :e 求幂 :SIN : 正弦 :COS :余弦 :TAN: 正切 :ASIN: 反弦 :ACOS: 反余弦 :ATAN:反正切 : EXPT:求幂 :二、库文件 Library1、Standard.lib 标准库1.1,String function: 字符串运算 :: LEN : 长度计算 :LEFT:左取位 :RIGHT:右取位 :MID : 中间取位 :CONCAT 字:符串叠加 : INSERT :插入 :DELETE : 删除:REPLACE 代:替 :FIND : 查找 :1.2,Trigger : 触发保持 ::R_TRIG:上升沿保持 :F_TRIG:下降沿保持 :1.3,Counter : 计数器 ::CTU : 上升沿计数 :CTD : 下降沿计数 :CTUD :上升沿、下降沿计数 :1.4,Timer : 计时器 ::TP : 触发计时器 :TON :高电平计时器 :TOF : 低电平计时器 :RTC : 运行时钟计时器 :一、操作块 Operator1、IEC Operators: 运算符 ::ADD :加法 :MUL :乘:SUB : 减:DIV : 除:MOD :求余 :2、Bitstring Operators: 逻辑操作 :: AND :与:OR : 或:XOR :异或 :NOT :非:3、Bit-shift Operators: 移位操作 :: SHL : 左移 :SHR :右移 :ROL : 循环左移 :ROR :循环右移 :4、Selection Operators: 选择操作 :: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值 :MIN : 最小值 :LIMIT : 比较选择 ::IN>MAX:OUT:=MAX;IN<MIN :OUT:=MI N;MUX :多路选择 :: OUT:=MUX(IN0,⋯,INk, ⋯INn);OUT:=Ink;5、Comparison Operators: 比较运算 ::GT : 大于 :LT : 小于 :LE : 小于等于 :GE : 大于等于 :EQ : 等于 :NE : 不等于 :6、Address Operators: 地址 ::ADR7、Calling Operators: 调用操作 :: CAL8、Type Conversion Functions : 转型功能 ::BOOL_, : 布尔值转型 : :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL : 转型成布尔值 ::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL : 整数类型转换 :REAL_,/LREAL_, : 实数型 / 长实数型转型 ::INT 等 :TIME_,/TIME_OF_DAY 时:间转型 ::STRING/DWORD/SINT等: DATE_,/DT_, : 日期转型 ::BOOL/INT/BYTE/STRING 等 : STRING_, : 字符串转型 ::BOOL/WORD/TIME等:TRUNC :取整 :9、Numeric Functions : 数据计算功能 ::ABS : 取绝对值 :SQRT :开方 :LN : 取自然对数 :LOG :取对数 :EXP :e 求幂 :SIN : 正弦 :COS :余弦 :TAN : 正切 :ASIN : 反弦 :ACOS :反余弦 :ATAN :反正切 :EXPT :求幂 :二、库文件 Library1、Standard.lib 标准库1.1,String function: 字符串运算 :: LEN : 长度计算 :LEFT : 左取位 :RIGHT : 右取位 :MID : 中间取位 :CONCAT 字:符串叠加 : INSERT : 插入 :DELETE :删除 :REPLACE 代:替 :FIND : 查找 :1.2,Trigger : 触发保持 ::R_TRIG : 上升沿保持 :F_TRIG : 下降沿保持 :1.3,Counter : 计数器 ::CTU : 上升沿计数 :CTD : 下降沿计数 :CTUD :上升沿、下降沿计数 : 1.4,Timer : 计时器 ::TP : 触发计时器 :TON :高电平计时器 :TOF : 低电平计时器 :RTC : 运行时钟计时器 :。
CoDeSys编程手册

codesys基本指令手册(C)

日立工业用控制器系列应用手册(服务手册)指令参考篇○质保期限及质保范围交货物品的质保期限自订单交到指定地点后一年。
在该质保期中,按照本使用说明书要求在产品规格范围内的正常使用状态下发生故障时,将对该机器的故障部分免费予以更换或修理。
但是,下列情况并不在本保证范围之列:(1) 需方的不当操作及使用所致;(2) 故障系交货物品以外的原因所致;(3) 非交货人实施的改造或修理所致;(4) 其他因天灾、灾害等非交货方责任所致;此处所涉及的保证是对交货物品部分的保证,由交货物品的故障所引发的损害并不在列。
并且,保证仅在日本国内有效。
○有偿修理质保期限(一年)后的检查及修理均为有偿。
并且,即使在质保期限内,上述质保范围之外的原因所导致的故障修理及故障原因调查将有偿进行,请联系购货经销商或售后维修站。
(但是有些故障点可能无法进行故障原因调查,敬请谅解)○部件订购或咨询当您需要与我们联系关于产品故障、部件订购或咨询其他事项时,请准备好以下几项信息,然后与购货经销商或售后维修站联系:(1) 型号(2) 制造编号(MFG.NO.)(3) 故障内容○需要阅读此手册的人员此手册适用于以下人员阅读:・PLC导入研究人员・PLC系统设计人员・PLC机器安装、连接人员・PLC导入后的管理人员安全注意事项安装、运行、维修及检查前,请务必熟读本使用说明书和其他相关资料,并正确使用。
请在充分掌握机器知识、了解安全信息和注意事项后再使用。
并且,请务必将此手册交由最终维护人员管理。
此手册中,安全注意事项被分为“危险”和“注意”两个等级。
而且,有些情况下标记的内容也可能引起严重事故。
无论哪种注意事项,它们都包含了重要的信息,请务必遵守。
禁止和强制的标志说明如下::表明禁止的事项(不可操作)。
例如:当禁止明火的时候,则显示:表明强制的事项(必须做)。
。
1. 安装3. 使用注意事项版本修订记录目录1.1 变量 ............................................................................................................................................................. 1-1 1.2 常量 ............................................................................................................................................................. 1-2 1.3 局部变量与全局变量 ................................................................................................................................. 1-2 1.4 数据类型 ..................................................................................................................................................... 1-4 1.5 指令一览表 ................................................................................................................................................. 1-5代入指令 ..................................................................................................................................................... 2-1 算数运算指令 ............................................................................................................................................. 2-2 逻辑运算指令 ............................................................................................................................................. 2-7 比较运算指令 ............................................................................................................................................. 2-11 移位指令 ..................................................................................................................................................... 2-17 选择指令 ..................................................................................................................................................... 2-21 数值运算指令 ............................................................................................................................................. 2-27 类型转换指令 ............................................................................................................................................. 2-39定时器与计数器 ......................................................................................................................................... 3-2 触发器(边沿检测) ................................................................................................................................. 3-14 flip-flop(双稳电路) ................................................................................................................................ 3-16 字符串 ......................................................................................................................................................... 3-20 系统时间指令 ............................................................................................................................................. 3-29 EtherCAT通信指令..................................................................................................................................... 3-38 Modbus-RTU/TCP通信指令 ...................................................................................................................... 3-74 HX-CPU专用指令 ...................................................................................................................................... 3-87 通用串行通信指令....................................................................................................................................... 3-1044.1 LD(梯形图逻辑图) ................................................................................................................................ 4-1 4.2 FBD(功能块图)...................................................................................................................................... 4-3 4.3 IL(指令表) ............................................................................................................................................. 4-4 4.4 ST(结构文本)......................................................................................................................................... 4-5 4.5 SFC(顺序控制功能图) .......................................................................................................................... 4-7 4.6 CFC(连续功能图).................................................................................................................................. 4-105.1 概要 ............................................................................................................................................................. 5-1 5.2 POU编辑例 ................................................................................................................................................. 5-2 5.3 库编辑例 ..................................................................................................................................................... 5-7第1章变量与常量用户程序中可以使用半角英文字母数字及日文。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Codesys脉冲定位指令
简介
本文档将介绍Co de sy s中的脉冲定位指令。
脉冲定位指令是一种在工业自动化领域中常用的指令,用于实现对位置的精确控制。
本文将详细介绍C od es ys中常用的脉冲定位指令的使用方法和注意事项。
脉冲定位指令的概述
脉冲定位指令是一种用于控制运动装置的指令,其原理是通过控制装置的运动轴,根据给定的脉冲数,将装置准确移动到目标位置。
这种指令在许多工业自动化应用中广泛使用,如机器人控制、数控机床等。
脉冲定位指令通常由一系列的参数组成,包括起始位置、目标位置、速度、加速度等。
通过调整这些参数,可以实现对位置的精确控制。
Codes ys中的脉冲定位指令
在C od es ys中,提供了丰富的脉冲定位指令,可满足不同应用场景下的需求。
下面将介绍一些常用的脉冲定位指令及其使用方法。
M C_M o v e A b s o l u t e
M C_M ov eA bs ol ut e指令用于将运动轴移动到指定的绝对位置。
其语法如下:
M C_M ov eA bs ol ut e(a x is_n am e,po si tio n,v el oc it y,ac cel e ra ti o n)
-`ax is_n am e`:指定要控制的运动轴的名称或编号。
-`po si ti on`:目标位置,单位为脉冲数。
-`ve lo ci ty`:运动速度,单位为脉冲数/秒。
-`ac ce le ra ti on`:加速度,单位为脉冲数/秒²。
使用该指令可以实现对运动轴的直接控制,使其移动到指定的位置。
M C_M o v e R e l a t i v e
M C_M ov eR el at ive指令用于将运动轴相对于当前位置移动指定的距离。
其语法如下:
M C_M ov eR el at iv e(a x is_n am e,di st anc e,v el oc it y,ac cel e ra ti o n)
-`ax is_n am e`:指定要控制的运动轴的名称或编号。
-`di st an ce`:相对移动的距离,单位为脉冲数。
-`ve lo ci ty`:运动速度,单位为脉冲数/秒。
-`ac ce le ra ti on`:加速度,单位为脉冲数/秒²。
使用该指令可实现对运动轴的相对控制,使其相对于当前位置移动指
定距离。
M C_H a l t
M C_H al t指令用于立即停止运动轴的运动。
其语法如下:
M C_H al t(ax is_n ame)
-`ax is_n am e`:指定要停止的运动轴的名称或编号。
使用该指令可以快速停止运动轴的运动,确保运动装置在需要时能够
立即停止。
注意事项
在使用脉冲定位指令时,需要注意以下几个事项:
1.确保正确配置运动轴及其相关参数,包括步进电机、编码器等。
2.设置合适的速度和加速度,以免过快的运动造成机械设备的损坏。
3.定期进行运动轴的校准和调整,以确保位置的准确性。
4.注意处理异常情况,如运动轴超出限位、电机过载等,及时采取相
应的措施。
结论
本文档介绍了C od es ys中常用的脉冲定位指令的使用方法及注意事项。
通过合理的配置和调整参数,结合脉冲定位指令的使用,可以实现对运动装置位置的精确控制,满足工业自动化领域中的各种需求。
希望本文对您
的工作和学习有所帮助。
参考文献
-C od es ys官方文档
-《工业自动化控制系统设计与应用》。