机械设计基础作业与参考答案
(完整版)《机械设计基础》答案
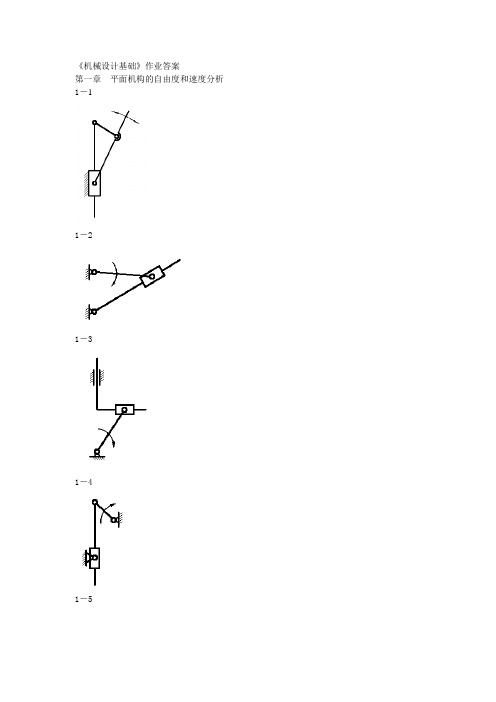
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
机械设计基础习题含答案

《机械设计基础课程》习题第1章机械设计基础概论1-1 试举例说明机器、机构与机械有何不同?1-2 试举例说明何谓零件、部件与标准件?1-3 机械设计过程通常分为几个阶段?各阶段的主要内容是什么?1-4 常见的零件失效形式有哪些?1-5 什么是疲劳点蚀?影响疲劳强度的主要因素有哪些?1-6 什么是磨损?分为哪些类型?1-7 什么是零件的工作能力?零件的计算准则是如何得出的?1-8 选择零件材料时,应考虑那些原则?1-9 指出下列材料牌号的含义与主要用途:Q275 、40Mn 、40Cr 、45 、ZG310-570 、QT600-3。
第2章现代设计方法简介2-1 简述三维CAD系统的特点。
2-2 试写出优化设计数学模型的一般表达式并说明其含义。
2-3 简述求解优化问题的数值迭代法的基本思想。
2-4 优化设计的一般过程是什么?2-5 机械设计中常用的优化方法有哪些?2-6 常规设计方法与可靠性设计方法有何不同?2-7 常用的可靠性尺度有那些?2-8 简述有限元法的基本原理。
2-9 机械创新设计的特点是什么?2-10 简述机械创新设计与常规设计的关系。
第3章平面机构的组成与运动简图3-1 举实例说明零件与构件之间的区别与联系。
3-2 平面机构具有确定运动的条件是什么?3-3 运动副分为哪几类?它在机构中起何作用?3-4 计算自由度时需注意那些事项?3-5 机构运动简图有何用途?怎样绘制机构运动简图?3-6 绘制图示提升式水泵机构的运动简图,并计算机构的自由度。
3-7 试绘制图示缝纫机引线机构的运动简图,并计算机构的自由度。
3-8 试绘制图示冲床刀架机构的运动简图,并计算机构的自由度。
3-9 试判断图a、b、c所示各构件系统是否为机构。
若是,判定它们的运动是否确定(图中标有箭头的构件为原动件)。
3-10 计算图a、b、c、d、e、f所示各机构的自由度,如有复合铰链、局部自由度、或虚约束请指出。
并判定它们的运动是否确定(图中标有箭头的构件为原动件)。
机械设计基础课后习题与答案
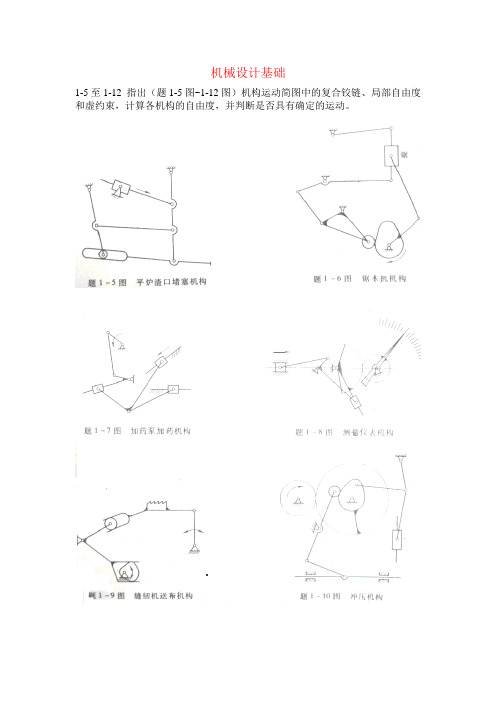
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础习题及答案

机械设计基础习题及答案机械设计基础是机械工程专业学生的一门重要课程,它涉及机械零件的设计原理、计算方法和应用实践。
以下是一些典型的机械设计基础习题及其答案。
# 习题一:带传动设计题目:设计一个用于传送带的V带,其传动功率为7.5kW,带速为1.5m/s,传动比为2:1。
请确定所需的带长、带的型号以及所需的张紧力。
答案:首先,根据传动功率和带速计算所需的有效拉力:\[ F = \frac{P}{v \times \eta} \]其中 \( P \) 为功率,\( v \) 为带速,\( \eta \) 为传动效率。
假设 \( \eta = 0.95 \)。
然后,根据传动比和带轮直径计算带长:\[ L = 2 \times (\pi \times (D_1 + D_2) / 2) \]其中 \( D_1 \) 和 \( D_2 \) 分别为主动轮和从动轮的直径。
最后,根据带的型号和张紧力公式计算所需的张紧力:\[ F_{\text{张}} = k \times F \]其中 \( k \) 为张紧力系数,根据带的型号确定。
# 习题二:齿轮传动设计题目:设计一对直齿圆柱齿轮,已知输入轴转速为1450rpm,输出轴所需转速为300rpm,传动比为4.83,模数为5mm。
请计算齿轮的齿数、齿顶圆直径和齿根圆直径。
答案:首先,根据传动比和模数计算主动轮和从动轮的齿数:\[ N_1 = \frac{N_2 \times i}{\text{传动比}} \]\[ N_2 = \frac{N_1 \times \text{传动比}}{i} \]其中 \( i \) 为输入轴转速与输出轴转速的比值。
然后,根据模数和齿数计算齿顶圆直径和齿根圆直径:\[ D_{\text{齿顶}} = m \times Z \]\[ D_{\text{齿根}} = D_{\text{齿顶}} - 2.5 \times m \]其中 \( Z \) 为齿数,\( m \) 为模数。
最全《机械设计基础》答案完整版.doc
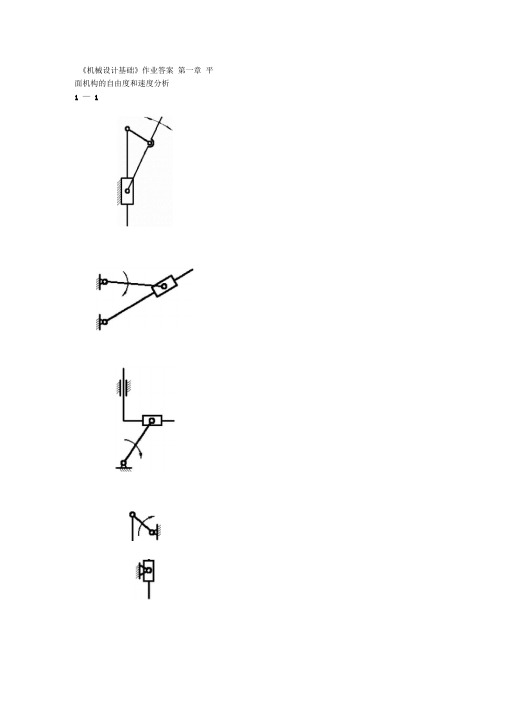
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1 —1自由度为:F =3n _(2P L +P H _P') _F' =3 7 -(2 9 1-0) -1二21-19 -1=1或:F =3n -2P L -P H=3 6 -2 8 -1-11-6自由度为F =3n _(2P L P H _P') _F' =3 9-(2 12 1 -0) -1 =1或:F =3n -2P L - F H=3 8-2 11-1=24-22 -1=11 —10自由度为:F =3n _(2P L +P H _P') _F' =3 10-(2 14 12 -2) -1 = 30 -28 -1=1或:F =3n-2P L - P H=3 9-2 12-1 2=27-24 -2=11 — 11F =3n -2P L -P H=3 4 -2 4 -2=21 — 13:求出题1-13图导杆机构的全部瞬心和构件R4 p 3 P34 R3 1、3的角速度比。
1 - 14:求出题1-14图正切机构的全部瞬心。
设 •= =10rad/s ,求构件3的速度v 3 。
v 3 =v P13 =叫 P 14P 3 =10^200 = 2000mm/s1- 15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比「1/「2。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心⑷ 1 沃 P 14p 2 =切2 “ !~24 P 12 4-13 P3PP1 3创|P 24p 2| 2r 2 ⑷ 2 IR 4P 12I r i=10 AC tan BCA 916.565mm/s :2.9rad / s转中心的距离l AC =15mm , I AB = 90mm ,^10rad /s ,求『-00和『-1800时,从动件角速度-'2的数值和方向。
机械设计基础课程形成性考核作业及答案

机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,__CEF__力的指向可以假定,__ABDG__力的指向不能假定.A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在__B__的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便.A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒。
求两吊杆的受力的大小。
解:受力分析如下图列力平衡方程:∑=0Fx又因为 AB=BCααsin sin C A F F =⋅C A F F =∑=0FyF F A =⋅αsin 2KN FF F B A 40sin 2===∴α第2章 常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动 2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n =7,P L =10,P H =0 (2)n =5,P L =7,P H =0H L P P n F --=23H L P P n F --=2310273⨯-⨯7253⨯-⨯C 处为复合铰链(3)n =7,P L =10,P H =0 (4)n =7,P L =9,P H =1H L P P n F --=23H L P P n F --=2310273⨯-⨯19273-⨯-⨯E 、E ’有一处为虚约束F 为局部自由度C 处为复合铰链第3章 平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C_为机架,将得到双曲柄机构。
高职《机械设计基础》齿轮系作业含答案
第12章齿轮系传动。
已知轮1的转速n 1=1 000 r/min ,试求轮4的转速及转动方向。
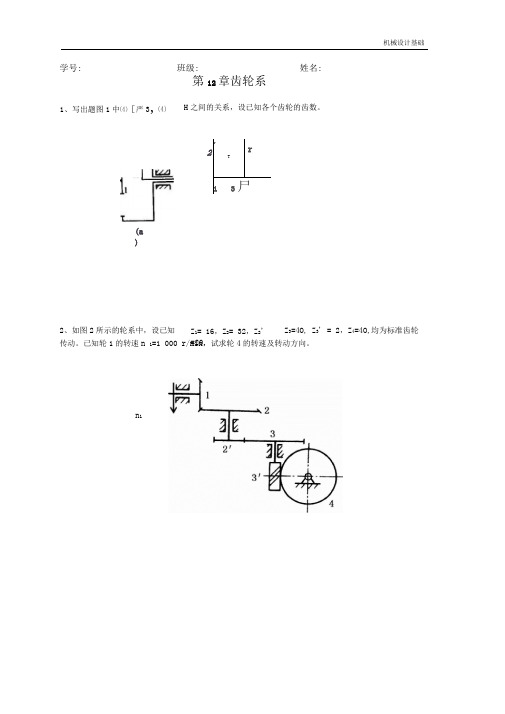
学号:班级: 姓名:1、写出题图1中⑷[严3,⑷H 之间的关系,设已知各个齿轮的齿数。
(a)rTr1 3尸22、如图2所示的轮系中,设已知Z 1= 16,Z 2= 32,Z 2'=20, Z 3=4O , Z 3' = 2,Z 4=4O ,均为标准齿轮 n 13.图3所示的轮系中,已知 z i =100,Z 2=101,Z 2' = 100,Z 3=99,均为标准齿轮传动。
试求i Hi。
4.图10-6所示的轮系中,已知 Z 1= 40, Z 2=40, Z 3= 40,均为标准齿轮传动。
试求I -H 13。
27100) 2(101)€1_H 1岡11# J 3\Z實1图45.在图5所示的齿轮系中, 已知 z i =20, Z 2= 40, Z 2'= 20, z 3= 30, Z 4=60,均为标准齿轮传动。
6.图6示为锥齿轮组成的周转轮系。
已知Z 1=Z 2=17,Z 2, =3O ,Z 3=45,若1轮转速n 1=200r/min , 试求系杆转速n H 。
-1 ・3t L_2 f■ !(1-2)T (2-3)T (3 -4)(2)传动比:(3)根据已知条件计算:n 4=n i /i= 1000/80=12.5 r/min轮4的转向如图所示应该逆时针转动。
(1_2)T (2,-3)因为:其■”号表示轮1与轮3在反转机构中的转向相反。
由图可知该轮系为一平行轴定轴轮系与简单行星轮系组成的组合轮系,其中 行星轮系:2’— 一 4- H1.解: (a )、・Hi13«1 -«3(b )、 ・Hi13牡一叭 =(-1)2(C )、・H113时1 -时32. 解: (1)传递路线为:Z 3乙Z 3乙乙'Z 3 乙Z 2齿轮系答案乙'定轴轮系: 1-2ijnZ 2 Z 3 Z 4 n 4Z i Z 2 Z 316x20x23. 解: (1)传递路线为:H.Hn 1 in 1 — ri H Z 2Z 3 Hn 3n 3 -n HZ 1 Z 2所以:n 1- nHZ 2Z 3 i 1H i H1-nHZ 1Z 2 n 1 n H n Hn 1i 1HZ 2Z 3=10000101 X 99 100X10010000・Hi13Hn 1 n 1 -n H Z 2 Z 3 Z 3 H n 3n 3 -n H乙Z 2Z 15.解:(1 )分析轮系(2)分析轮系中各轮之间的内在关系,由图中可知: n4=0. n2=n2' (3)分别计算各轮系传动比定轴齿轮系:由式(10-1 )得i i 2 亠(-2n2 Zi(1)n i =-2n2 行星齿轮系・HI24式(1 )、Z4Z3Hn4 “4 -n H Z3 Z2 *一60 —320(2) (2)联立求解联立(1 )、(2)式,代入n4=0, n2=n2 得n2 T H C=-3n1=-2n2所以i1H =n H -2n2n2=—86.解:(1 )•判定轮系类型,确定传动比计算式轮系类型一因在一轮系运转时,齿轮2和2'的轴线相对于机架的位置不固定,且齿轮固定不转动,故为行星轮系;传动比公式一系杆转速n H须通过行星轮系的转化轮系(假想定轴轮系)传动比公式求得。
机械设计基础习题集(附解答)

实用文档目录绪论 (1)平面机构的自由度 (3)平面连杆机构 (8)凸轮机构 (14)齿轮机构 (18)轮系 (23)机械零件设计概论 (28)联接 (30)齿轮传动 (41)蜗杆传动 (51)带、链传动 (60)轴 (69)滑动轴承 (75)滚动轴承 (78)联轴器和离合器 (91)绪论1. 简述机构与机器的异同及其相互关系。
2. 简述机械的基本含义。
3. 简述构件和零件的区别与联系。
4. 简述“机械运动”的基本含义。
5. 简述“机械设计基础”课程的主要研究对象和内容。
6. 简述“机械设计基础”课程在专业学习中的性质。
【参考答案】1. 共同点:①人为的实物组合体;②各组成部分之间具有确定的相对运动;不同点:机器的主要功能是做有用功、变换能量或传递能量、物料、信息等;机构的主要功能是传递运动和力、或变换运动形式。
相互关系:机器一般由一个或若干个机构组合而成。
2. 从结构和运动的角度看,机构和机器是相同的,一般统称为机械。
3. 构件是机械中的运动单元,零件是机械中的制造单元;构件是由一个或若干个零件刚性组合而成。
4. 所谓“机械运动”是指宏观的、有确定规律的刚体运动。
5. 研究对象:常用机构(平面连杆机构、凸轮机构、齿轮机构等)和通用零(部)件(螺栓、键、齿轮、带、链、轴、轴承、联轴器、离合器等)。
研究内容:机构的组成及其工作原理、结构分析、运动分析等;零(部)件结构、设计计算、类型选择、使用维护等。
6. “机械设计基础”课程着重研究各类机械中的共性问题,为进一步深入研究各种专门机械奠定基础;同时,“机械设计基础”课程的学习又涉及到高等数学、机械制图、工程力学、工程材料以及机械制造基础等知识的综合运用。
因此,“机械设计基础”是课程体系中的一门专业技术基础课程。
平面机构的自由度1. 什么是机构中的原动件、从动件、输出构件和机架?2. 机构中的运动副具有哪些必要条件?3. 运动副是如何进行分类的?4. 平面低副有哪两种类型?5. 简述机构运动简图的主要作用,它能表示出原机构哪些方面的特征?6. 机构自由度的定义是什么?一个平面自由构件的自由度为多少?7. 平面运动副中,低副和高副各引入几个约束?8. 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?9. 运动链和机构关系如何?10. 画出下列机构的示意图,并计算其自由度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、()是构成机械的最小单元,也是制造机械时的最小单元
A. 机器;
B. 零件;
C. 构件;
D. 机构。
参考答案:B
2、在下列平面四杆机构中,()存在死点位置
A. 双曲柄机构;
B. 曲柄主动的曲柄滑块机构;
C. 摇杆主动的曲柄摇杆机构;
D. 曲柄主动的转动导杆机构
参考答案:C
3、普通V型带传动是借助带和带轮间的()来传递动力和运动的
A. 啮合;
B. 磨擦;
C. 粘接
D. 牵引
参考答案:B
4、链传动属于()传动
A. 摩擦传动;
B. 啮合传动;
C. 两者均不是
参考答案:B
5、在带传动中(减速传动) ,带的应力最大值发生在带()
A. 松边与大带轮切点;
B. 紧边与大带轮切点;
C. 松边与小带轮切点;
D. 紧边与小带轮切点
参考答案:D
6、()是链传动承载能力、链及链轮尺寸的主要参数
A. 链轮齿数z1;
B.链节距p;
C. 链节数;
D. 链长L
参考答案:B
7、一对渐开线直齿圆柱齿轮正确啮合的条件是()
A. 两齿轮的模数和齿距分别相等;
B. 两齿轮的齿侧间隙为零;
C. 两齿轮的齿厚和齿槽宽分别相等;
D. 两齿轮的模数和压力角分别相等
参考答案:D
8、自行车车轮的前轴属于()轴
A. 传动轴;
B. 转轴;
C. 固定心轴;
D. 转动心轴
参考答案:C
9、渐开线的形状取决于()直径
A. 节圆;
B. 基圆;
C. 分度圆;
D. 齿顶圆
参考答案:B
10、我国国家标准规定,标准渐开线齿轮的分度圆压力角α=()
A. 35°;
B. 30°;
C. 25°;
D. 20°
参考答案:D
11、蜗杆传动适用于()传动
A. 相交轴;
B. 平行轴;
C. 交错轴;
D. 任意相交轴
参考答案:C
12、平均传动比和瞬时传动比均准确的传动是()
A. 带传动;
B. 链传动;
C. 齿轮传动;
D. 双曲柄机构传动
参考答案:C
13、定轴轮系的总传动比等于各级传动比()
A. 之和;
B. 连乘积;
C. 之差;
D. 平方和
参考答案:B
14、减速传动的传动比i=()
A. >1
B. <1
C. =1
D. 不确定
参考答案:A
15、在螺栓的直径参数中()与螺栓的抗拉强度关系最大
A. 中径;
B. 小径;
C. 大径
参考答案:B
16、推力球轴承的类型代号为()
A. 10000;
B. 30000;
C. 50000;
D. 60000
参考答案:C
17、下列密封方法,其中()是属于接触式密封
A. 毡圈式密封;
B. 间隙式密封;
C. 迷宫式密封
参考答案:A
18、转轴承受()
A. 扭矩;
B. 弯矩;
C. 扭矩和弯矩
参考答案:C
19、在铸锻件毛坯上支承螺母的端面加工成凸台和沉头座,其目的是()
A. 易拧紧;
B. 避免偏心载荷;
C. 增大接触面;
D. 外观好
参考答案:B
20、机构中活动构件的总自由度数与全部移动副引入的约束总数之差称为()
A. 机构的自由度;
B. 构件的自由度;
C. 机器的自由度;
D. 机构具有确定运动的条件
参考答案:A
友情提示:部分文档来自网络整理,供您参考!文档可复制、编制,期待您的好评与关注!。