机械手工件搬运PLC顺控程序
小型搬运机械手的PLC控制系统设计

小型搬运机械手的PLC控制系统设计
小型搬运机械手的PLC控制系统设计包括以下几个方面:
1. 确定系统需求:首先需要明确机械手的工作任务和工作环境,包
括搬运物品的重量、尺寸和形状,以及工作空间的限制。
2. 选择适当的PLC:根据系统需求选择合适的PLC,考虑其输入输
出点数、通信接口、处理能力和可靠性等因素。
3. 确定传感器和执行器:根据机械手的工作任务选择合适的传感器
和执行器,例如光电传感器、接近开关、压力传感器、伺服电机等。
4. 确定控制策略:根据机械手的工作任务确定控制策略,包括运动
控制、路径规划、物体识别等。
5. 编写PLC程序:根据控制策略编写PLC程序,使用相应的编程语
言(如 ladder diagram、structured text 等),实现机械手的自
动化控制。
6. 连接传感器和执行器:根据PLC的输入输出点数,将传感器和执
行器与PLC连接起来,确保数据的准确传输和控制信号的可靠输出。
7. 调试和测试:完成PLC程序编写后,进行调试和测试,验证系统
的功能和性能是否满足需求,对程序进行优化和修正。
8. 系统集成和实施:将PLC控制系统与机械手进行集成,确保系统
的稳定运行和安全性。
9. 运维和维护:定期对PLC控制系统进行维护和保养,包括检查传
感器和执行器的工作状态,更新PLC程序,修复故障等。
需要注意的是,小型搬运机械手的PLC控制系统设计需要根据具体
的应用场景和要求进行定制,以上仅为一般性的设计步骤和考虑因素,具体设计还需根据实际情况进行调整和优化。
简易机械手PLC控制
简易机械手PLC控制简介在制造业中,机械手是一种关键的工业自动化设备,用于处理和搬运物品。
机械手的控制非常重要,它决定了机械手的精度和效率。
PLC (可编程逻辑控制器)是一种常用的控制设备,它可以编程来控制机械手的运动和动作。
本文将介绍如何使用PLC控制一个简易机械手的运动。
所需硬件和软件•一台简易机械手•一个PLC设备•一个用于编程的PLC软件步骤步骤一:连接PLC设备和机械手首先,将PLC设备连接到机械手控制器上。
确保连接正确,以便PLC能够发送指令给机械手控制器。
步骤二:安装PLC软件并编程在电脑上安装PLC软件,并启动软件。
创建一个新的项目,并选择适当的PLC类型和通信配置。
然后,开始编程。
步骤三:设置输入输出(IO)点在PLC软件中,设置适当的输入输出(IO)点,以接受和发送信号。
例如,设置一个输入点来接收机械手的位置信号,以便PLC可以确定机械手的当前位置。
同时,设置一个输出点来发送控制信号给机械手,以控制它的动作。
步骤四:编写程序逻辑使用PLC软件编写机械手的控制程序。
根据机械手的需求,编写逻辑来控制机械手的运动和动作。
例如,如果机械手需要抓取一个物体并将其放置到另一个位置,那么编程逻辑应该包括机械手的移动和抓取指令。
确保编写的逻辑合理且有效。
步骤五:测试和调试在PLC软件中,模拟机械手的动作并进行测试。
确保PLC能够正确地控制机械手的运动。
如果发现错误或问题,进行调试并修正程序逻辑。
步骤六:上传程序到PLC当测试和调试完成后,将编写的程序上传到PLC设备中。
确保上传的程序可以在PLC上正确运行。
步骤七:运行机械手一切准备就绪后,运行机械手。
PLC将根据编写的逻辑控制机械手的运动和动作。
结论使用PLC控制机械手是一种常见的工业自动化方法。
通过编写合理的程序逻辑,PLC可以控制机械手的运动和动作,提高生产效率和精度。
希望本文能够帮助读者了解如何使用PLC控制简易机械手。
PLC实验简易机械手PLC控制

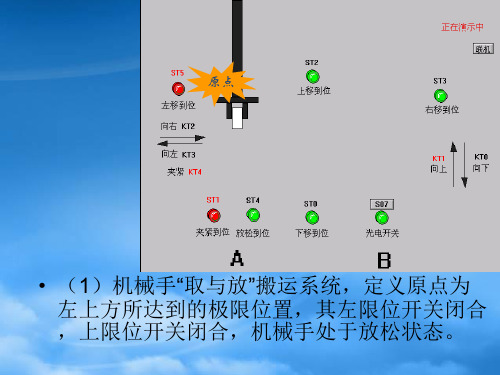
简易机械手PLC控制示意图如下:2、控制方式:1)手动操作:将机械手复归至原点位置。
2)连续运行:在原点时,按启动按钮,按工作循环图边疆工作一个周期。
一个工作周期工艺过程:原点下降夹紧(T)上升右移下降松(T)上升左移至原点。
3、显示控制Y0------下降Y1------夹紧、放松Y2------上升Y3------右移Y4------左移参考答案:(1)I/O输入、输出分配X0 起动Y0------下降X1 下限X2 上限Y1------夹紧、放松X3 右限X4 左限Y2------上升X5 手动/自动X6 下降Y3------右移X7 夹紧、放松X10 上升Y4------左移X11 右移X12 左移Y5------原点X13 原点X14 急停/复位(2)PLC输入、输出图(3)状态流程图(4)步进状态图X5CJ P0X6Y0 X14 ZRST S20 S28 X7Y1 ZRST Y0 Y5 X10Y2X11Y3X12Y4FENDP0自动程序RETENDS20(5)编写程序LD X5 SET S22CJ P0 STL S22LD X6 RST Y1OUT Y0 OUT T0 K20LD X7 LD T0OUT Y1 SET S23LD X10 STL S23OUT Y2 OUT Y2LD X11 LD X2OUT Y3 SET S24LD X12 STL S24OUT Y4 OUT Y3LD X13 LD X3OUT Y5 SET S25FEND STL S25P0 OUT Y0LD M8000 LD X1SET S0 SET S26STL S0 STL S26LD X14 SET Y1ZRST S20 S28 OUT T1 K20ZRST Y0 Y5 LD T1LD X2 SET S27AND X4 STL S27SET S20 OUT Y2STL S20 LD X2SET Y1 SET S28OUT Y5 STL S28LD X0 OUT Y4SET S21 LD X4STL S21 OUT S20OUT Y0 RETLD X1 END。
如何用PLC来控制机械手
输出端口配置
输出设备
输出端口编号 接考核箱对应端口
下降电磁阀KT0
Y00
H01
上升电磁阀KT1
Y01
H02
右移电磁阀KT2
Y02
H03
左移电磁阀KT3
Y03
H04
夹紧电磁阀KT4
Y04
H05
操作要求
• 按工艺要求画出控制流程图;
– 写出梯形图程序或语句程序(考生自选其一) ;
– 用FX2系列PLC简易编程器或计算机软件进行 程序输入;
停止
N 循环3次
Y
Y X1
S20 S22
S26 S24
S21
S25
下降 夹紧 上升
右移 下降 放松 上升 左移
用“PLC仿真软件”调试时,需要输入指令: LD M8000 MOV C0 D0
注意: 用组态王调试时, 触点X4、X6、X7 不要输入电脑; 用PLC仿真软件调 试时,X4、X6、 X7三个触点 都要输入电脑参与 调试
输入端口配置
输入设备 启动按钮SB1 停止按钮SB2 下降到位ST0 夹紧到位ST1 上升到位ST2 右移到位ST3 放松到位ST4 左移到位ST5 光电检测开关SB7
输入端口编号 X10 X11 X02 X03 X04 X05 X06 X07 X00
接考核箱对应端口 SB1 SB2
电脑和PLC自动连接 电脑和PLC自动连接 电脑和PLC自动连接 电脑和PLC自动连接 电脑和PLC自动连接 电脑和PLC自动连接
谢谢观看/欢迎下载
BY FAITH I MEAN A VISION OF GOOD ONE CHERISHES AND THE ENTHUSIASM THAT PUSHES ONE TO SEEK ITS FULFILLMENT REGARDLESS OF OBSTACLES. BY FAITH I BY FAITH
PLC搬运机械手课程设计
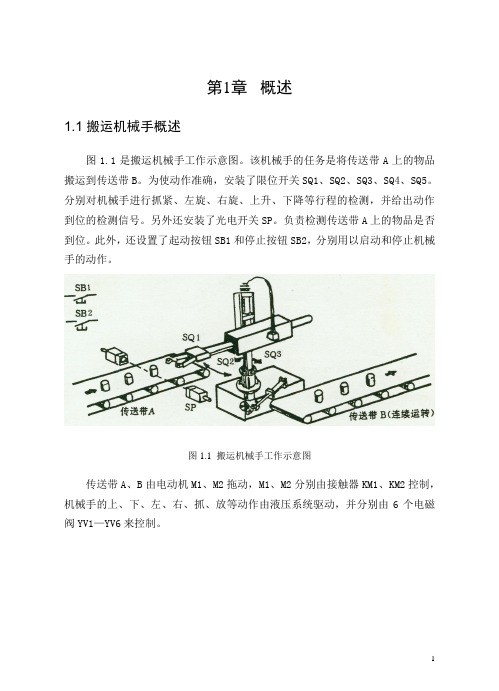
第1章概述1.1搬运机械手概述图1.1是搬运机械手工作示意图。
该机械手的任务是将传送带A上的物品搬运到传送带B。
为使动作准确,安装了限位开关SQ1、SQ2、SQ3、SQ4、SQ5。
分别对机械手进行抓紧、左旋、右旋、上升、下降等行程的检测,并给出动作到位的检测信号。
另外还安装了光电开关SP。
负责检测传送带A上的物品是否到位。
此外,还设置了起动按钮SB1和停止按钮SB2,分别用以启动和停止机械手的动作。
图1.1 搬运机械手工作示意图传送带A、B由电动机M1、M2拖动,M1、M2分别由接触器KM1、KM2控制,机械手的上、下、左、右、抓、放等动作由液压系统驱动,并分别由6个电磁阀YV1—YV6来控制。
1.2搬运机械手运动过程根据对机械手的工艺过程及控制要求分析,机械手的动作过程如图1.2所示:图1.2机械手动作过程1.3设计要求传送带B处于连续运行状态,不用PC控制。
机械手和传送带A要求按照一定的顺序动作,其步序图如图1.3所示。
启动时,机械手按照步序图的工步顺序动作;停止时,机械手停止在现行工步上。
重新启动时机械手从停止前一瞬间的动作继续进行;PLC断电时的要求与停止时的要求一致。
要求搬运机械手控制系统具有手动、单周期和连续循环三种工作方式。
1.4设计任务1.设计和绘制电气控制原理图或PC I/O接线图、功能表图和梯形图,编写指令程序清单。
2.选择电气元件,编制电气元件明细表。
3.设计操作面板电器元件布置图。
4.上机调试程序。
5.编写设计说明书。
启动按钮SB1停止按钮SB2手爪抓限位开关SQ1手臂左限位开关SQ2手臂右限位开关SQ3手臂上限位开关SQ4手臂下限位开关SQ5光电开关SP 传送带A运行KM1手臂左旋YV3手臂右旋YV4手臂上升YV1手臂下降YV2手爪抓紧YV5手爪松开YV6步序234567891s11个搬运周期图1.3搬运机械手动作步序图第2章控制方案论证机械手电气控制系统,除了有多工步特点之外,还要求有单周(连续)控制和手动控制等操作方式。
项目10 PLC控制搬运机械手设计

• 1.垂直气缸、水平气缸选择 • (1)类型选择。 • 现有的工作要求和条件如下: • 1)要求当气缸到达行程终端时无冲击现象和撞击噪声,因此选择缓冲
气缸; • 2)要求重量轻,因此选择轻型气缸; • 3)要求安装空间窄且行程短,因此可选择薄型气缸; • 4)若有横向负载,可选带导杆气缸; • 5)要求制动精度高,应选择锁紧气缸; • 6)若不需要活塞杆旋转,可选择杆不回转气缸。
上一页 下一页 返回
10. 1搬运机械手设计案例导入
• 10. 1. 3材料选择
• 机器人手臂的材料应根据手臂的工作状况来选择,并满足机器人的设 计及制作要求。从设计的思想出发,机器人的手臂要求完成各种运动。 因此,对材料的一个要求是作为运动的部件,它应是轻型材料。另一 方面,手臂在运动过程中往往会产生振动,这必然会大大降低它的运 动精度,所以在选择材料时,需要对质量、刚度、阻尼进行综合考虑, 以便有效地提高手臂的动态性能。此外,机器人手臂选用的材料与一 般的结构材料不同。机器人手臂是一种伺服机构,要受到控制,必须 考虑它的可控性。可控性还要与材料的可加工性、结构性、质量等性 质一起考虑。总之,在选择机器人手臂材料时,要考虑强度、刚度、 重量、弹性、抗振性、外观及价格等多方面因素,下面为几种常见机 器人手臂材料:
上一页 下一页 返回
10. 1搬运机械手设计案例导入
• (1)碳素结构钢和合金结构钢等高强度钢:这类材料强度好,尤其是合 金结构钢强度增加了4~ 5倍,弹性模量大、抗变形能力强,是应用最 为广泛的材料。
• (2)铝、铝合金及其他轻合金材料:其共同特点是重量轻,弹性模量不 大,但是材料密度小,其(E/P)之比仍可与钢材相比。
上一页 下一页 返回
课程设计_PLC搬运物品机械手控制设计
课程设计_PLC搬运物品机械手控制设计PLC(Programmable Logic Controller)搬运物品机械手控制设计是一门工业自动化领域的课程。
在制造业中,物品搬运常常是非常繁琐的工作,因此机械手的出现给了制造业带来极大的便利。
机械手需要通过PLC来进行控制,通过对PLC程序的编程,可以让机械手对物品进行精准搬运。
本文将介绍PLC搬运物品机械手控制设计的相关知识和实践操作。
一、搬运物品机械手控制设计的基本知识1. PLC的基本概念PLC(Programmable Logic Controller)即可编程控制器,是一种专门用于控制工业生产过程的计算机硬件,也是一种特殊的计算机控制系统。
PLC控制器主要由中央处理器(CPU)、输入/输出模块(I/O)、电源部分和编程器四个部分组成。
PLC控制器的任务是将输入设备的信号转换为控制信号去驱动输出设备,从而实现控制过程。
2. 机械手的基本概念机械手(Robotic Arm)是一种可以代替人手进行工业生产操作的机器人。
它主要由机械臂、控制器、传感器、执行器等多个部件组成。
机械手在工业生产中可以起到非常重要的作用,在电子、汽车、食品等工业领域都有广泛应用。
3. 搬运物品机械手的基本工作原理搬运物品机械手的基本工作原理是通过控制机械手的关节转动和末端执行器的运动来实现物品的搬运。
在实际应用中,机械手需要进行复杂的运动规划,通过PLC对机械手进行精准的控制,可以实现对物品的精准搬运。
二、PLC搬运物品机械手控制设计的实践操作在PLC搬运物品机械手控制设计的实践操作中,我们需要通过PLC编程来实现搬运物品机械手的自动化控制。
1. 确定控制策略在控制机械手的过程中,需要明确控制策略,比如机械手的运动轨迹、动作的先后顺序、运动速度等。
在PLC编程中,可以通过编写具体的程序来实现控制的策略。
2. 设计PLC程序在PLC编程之前,我们需要根据机械手控制的策略来设计PLC程序。
项目十 机械手搬运系统的PLC控制

图 10-1-11 选择性分支汇合处 SFC 图
注意:①各选择性分支列不能相互交叉; ②分支列和汇合列也不能交叉。
4
图 10-1-12 对应的步进梯形图
4)并行分支结构分流处的转换 图10-1-13所示并行分支结构SFC图分流处转换成步进梯形图后如图10-1-14所示,各分 支用STL指令开始独立转换,转换方法和单流程结构完全相同。
控制要求:1)系统具有手动、连续、单步运行、单周期运行和回原点五种不同的运行方式, 方式的选择由多档位转换开关实现,并分别由HL1、HL2、HL3、HL4、HL5常亮来指示。
2)机械手在原点位置才能启动连续、单步运行和单周期运行方式,原点位置在机械手 后上角;
3)手动操作方式要求按相应按钮后机械手能手动完成夹紧、放松、 上升、下降、前伸 和缩回的动作。
图 10-1-6 并行分支结构 SFC 图
6.画顺控功能图(SFC 图)的注意事项: 1)两个步绝对不能直接相连,必须用一个转换条件将它们隔开。 2)两个转换也不能直接相连,必须用一个步将它们隔开。 3)顺控功能图中的初始步不能少。 4)在连续循环工作方式时,应从最后一步返回下一个工作周期开始运行的第一步。 5)无论是选择性分支结构还是并行分支结构,每次的分支数量不能超过 8 条,总计不 超过 16 条。
3. 顺序控制设计法的基本步骤: 1)划分步 控制系统中某一执行装置在某一段时间相对不变的一个动作或者几个动作称作状态。按 状态的不同,将控制系统划分为若干控制任务,每一个控制任务就称为 PLC 程序中的一步。 2) 确定转换条件 转换条件是系统从当前步进入下一步的条件,即从一个动作转换为另一个动作的条件。 3) 绘制顺序功能图(SFC) 根据以上分析画出描述系统工作过程的顺序功能图(SFC 图)。画顺序功能图先画初始 步,再按各工作步的顺序画转移条件、步、和步内所需要驱动的输出,一个步画完再画下一 个步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械手工件搬运PLC顺控程序
机械手工件搬运PLC顺控程序是一种自动化工艺,用于控制和协调机械手和工业车间中的其他设备,以完成物料和零件的搬运。
PLC(可编程逻辑控制器)是这个系统的核心部分,它包含了一个程序,用于控制机械手的动作,并协调搬运过程中的其他元素,例如输送带、传送机和各种传感器。
该系统的主要应用场景是工业生产线,例如汽车、电子和五金制品制造厂等。
其中最大的优点是实现了高效率、高精度和高质量的生产流程。
本文将深入探讨机械手工件搬运PLC顺控程序的构成、原理和应用,以帮助读者更好地理解和应用这个自动化系统。
1. 构件
机械手工件搬运PLC顺控程序由以下四个构件组成:机械手、输送带、传送机和PLC控制器。
机械手是核心部件,它包括一个控制系统和一系列从动部件。
控制系统通常由一个工控机和一个专用的PLC控制器组成,它们负责控制机械手的动作,并与其他设备协调工作。
输送带和传送机是用来传输工件和零件的,通常安装在生产线上。
输送带通常是一条长度较长的带式输送机,由电机驱动,可在两端控制速度和停止运行。
传送机通常是一个类似于传送带的机械臂,负责在不同的生产器件之间传输物品。
这两
个设备都配备了传感器,用于激活PLC控制器,以便向机械手指示何时进行抓取和卸载操作。
PLC控制器是整个系统的核心,由一个或多个微处理器组成。
它与机械手、输送带和传送机之间建立通信网络,以便管理工作流程,并实现自动化操作。
因为PLC控制器是可编程的,它可以根据需要进行定制操作,满足不同的生产要求。
2. 工作原理
该系统的工作过程如下:
- 首先,工件或零件通过输送带或传送机传输到机械手前方,触发传感器。
- 传感器激活PLC控制器,PLC控制器发送
信号到机械手,让机械手开始运作。
- 机械手进行抓取动作,
把工件从输送带或传送机上抓取下来。
- 机械手在特定的位置
上停止,等待PLC控制器发送下一道指令。
- PLC控制器向机械手发送下一道指令,指示机械手如何移动或卸载工件。
- 一旦
工件被卸载,机械手继续等待PLC控制器的下一条指令,或者进入待机模式。
整个流程是由PLC控制器管理的,它可以根据生产需求进行定制。
3. 应用领域
机械手工件搬运PLC顺控程序的应用领域非常广泛,包括汽车制造、电子制造、食品加工、五金制品生产等等。
在这些领域中,生产流程需要高度自动化和高效率的工作流程,机械手工件搬运PLC顺控程序是非常有用的工具。
应用机械手搬运零件的经典领域是汽车制造业。
在汽车流水线上,机械手必须在非常短的时间内从传送带或传送机上抓取零件,将其放置在适当的位置,同时要确保零件的安全和不受损失。
机械手工件搬运PLC顺控程序可以满足这些要求,并且可以在整个汽车制造的流程中节省大量的时间和人力成本。
食品加工业也是机械手工件搬运PLC顺控程序的主要应用领域之一。
在加工新鲜食品时,高度卫生要求和时间要求都很高,所以需要机械手工件搬运PLC顺控程序的高效率和安全性来保证生产流程的正确性。
4. 总结
机械手工件搬运PLC顺控程序是一种高效率、高自动化和高质量的自动化工艺。
它主要用于工业生产线上,主要应用于汽车、电子、五金制品制造厂等领域。
其核心构件包括机械手、输送带、传送机和PLC控制器,工作流程由PLC控制器完成。
在生产流程中,机械手工件搬运PLC顺控程序可以大大提高生产效率、减少人力成本,并确保生产的质量和一致性。