(完整版)基于PLC的搬运机械手控制系统设计112
基于PLC控制的搬运机械手设计

l B 1
1 B 2
横臂 收回到位
横臂 伸出到位
手 爪 松 开 状 态
1 0 . 2
1 0 . 3
1 0 . 4
2 B 1
2 B 2
3 B 1
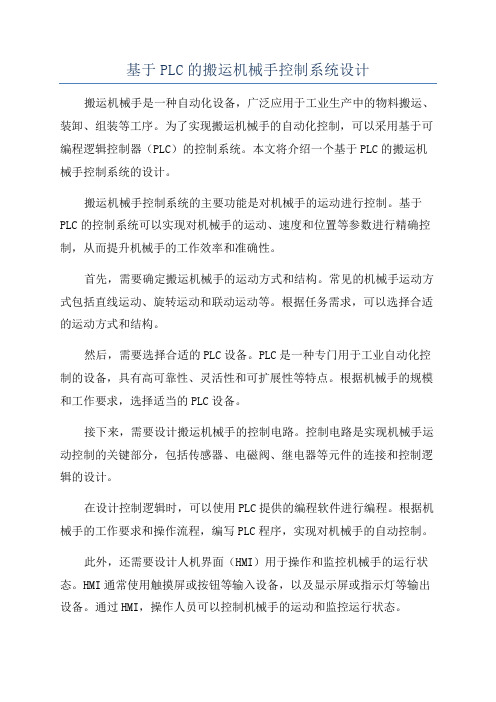
搬运机械手是 一个整体的单元 , 其动作顺序为 : 开始_ + 横 臂 伸 出一 竖 臂 伸 出一 手 指 夹 紧 一 竖 臂 收 回 横臂收回_ + 摆动右摆 横臂伸出一竖臂伸出_ ÷
急停
I 2 7
摆动 气缸顺时针 摆动气 缸逆时针 双 活塞杆气缸 杆收 回 双 活塞杆气缸杆伸 出
气 爪 开
Q o . 0 Q O . 1 Q O . 2 Q O . 3
Q O . 4
1 Y1 l Y 2 2 Y l 2 Y 2
3 Yl
通 过 对 搬 运 机 械 手 控 制 线 路 及 加 工 工 艺 的 分
采用组态监控 ,为搬运机械手 的运动提供 了一个仿 析 , 输 入信号 为按钮 、 选择开关 、 接近开关等主令 电 真的工业环境 , 通过软件控制代替硬接线控制 , 以软 器 ; 输 出信号为继电气线圈 、 电磁阀等控制 电器 。结 件编程 完成搬 运机械手 运动过 程 的动作修 改和控 合搬运机械手 的运动过程 ,该 系统需要 1 5 个输入 制, 在一定程度上提高了搬运机械手系统的灵活性。
要: 传统的搬运机械手采用硬接线控制 , 系统接 线复杂 , 灵活性 有待提 高。提 出了一种基 于 P L C控 制的搬运机械 手
设计 方案 , 并采用 MCG S组 态监控 。 以软件编程代替硬件控 制完成机械 手的运 动控 制 , 在一定程度上提 高了搬运机械 手
系统 的灵 活性 。
基于PLC的搬运机械手控制系统设计
基于PLC的搬运机械手控制系统设计搬运机械手是一种自动化设备,广泛应用于工业生产中的物料搬运、装卸、组装等工序。
为了实现搬运机械手的自动化控制,可以采用基于可编程逻辑控制器(PLC)的控制系统。
本文将介绍一个基于PLC的搬运机械手控制系统的设计。
搬运机械手控制系统的主要功能是对机械手的运动进行控制。
基于PLC的控制系统可以实现对机械手的运动、速度和位置等参数进行精确控制,从而提升机械手的工作效率和准确性。
首先,需要确定搬运机械手的运动方式和结构。
常见的机械手运动方式包括直线运动、旋转运动和联动运动等。
根据任务需求,可以选择合适的运动方式和结构。
然后,需要选择合适的PLC设备。
PLC是一种专门用于工业自动化控制的设备,具有高可靠性、灵活性和可扩展性等特点。
根据机械手的规模和工作要求,选择适当的PLC设备。
接下来,需要设计搬运机械手的控制电路。
控制电路是实现机械手运动控制的关键部分,包括传感器、电磁阀、继电器等元件的连接和控制逻辑的设计。
在设计控制逻辑时,可以使用PLC提供的编程软件进行编程。
根据机械手的工作要求和操作流程,编写PLC程序,实现对机械手的自动控制。
此外,还需要设计人机界面(HMI)用于操作和监控机械手的运行状态。
HMI通常使用触摸屏或按钮等输入设备,以及显示屏或指示灯等输出设备。
通过HMI,操作人员可以控制机械手的运动和监控运行状态。
最后,进行系统调试和测试。
在将系统投入使用之前,需要进行调试和测试,确保搬运机械手的运动控制正常,并满足工作要求。
总结起来,基于PLC的搬运机械手控制系统设计包括确定运动方式和结构、选择合适的PLC设备、设计控制电路、编写PLC程序、设计人机界面以及进行系统调试和测试等步骤。
通过PLC控制系统的应用,可以提高机械手的自动化程度,提升生产效率和产品质量。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计搬运机械手是工业生产中常用的一种机器人,目的是为了将物品从一个地方搬到另一个地方,以实现生产线的自动化生产。
为了方便操作和控制机械手的运动,我们常使用PLC进行控制。
本文将详细介绍基于PLC的搬运机械手控制系统设计并分为以下几个部分:系统设计、硬件设计、软件设计和测试与优化。
系统设计在设计搬运机械手的控制系统前,需要明确其基本能力以及操作条件。
本文需要实现的是一个能够在工业生产上自动完成货物的移动,如从一个点到达另一个点,或从一个点将货物取下并放入另一个点的机械手控制系统。
硬件设计在硬件方面,机械手的结构以及体积会影响到设计的复杂度和控制的难度。
机械手的操作部分包括控制电路、执行器驱动电路、电源等。
现在,我们来介绍每个部分的主要内容。
控制电路部分包括PLC、IO模块等。
PLC是机械手控制的核心,负责读取传感器信号并控制执行器的动作。
IO模块则负责将信号转换为PLC能接受的信号进行处理。
执行器驱动电路部分主要负责控制电机动作。
电机的选择与应用需要根据机械手的具体要求而定,需要注意的是,电机的转矩和功率需要协调匹配,还需要注意电机的供电和控制电路之间的配合问题。
电源系统是机械手控制系统的基础之一,电源的大小和控制器的匹配与应用直接关系到系统的正常运行。
需要根据需要提供相应的电压以及功率供给系统。
软件设计在软件设计方面,我们借助PLC程序进行控制,根据机械手的执行需要编写相应的程序,实现机械手的移动、旋转、夹取或放置操作。
具体流程如下:1. 初始化- 设定初始位置和状态等参数;2. 等待操作信号- 根据设定的信号进行等待;3. 传感器检测- 检测对象的位置和状态;4. 判断操作- 根据传感器检测结果进行相应操作;5. 输出控制信号- 控制执行器动作,改变机械手所处的位置和状态。
测试与优化测试与优化是机械手控制系统设计的重要一步,目的是检查系统的稳定性和准确性。
在测试过程中,需要测试机械手的各种运动状态,比如加速度、负载、速度等参数,以确定机械手的质量和性能优化方向。
基于PLC机械手控制系统设计

2024-04-29
• 项目背景与意义 • 整体方案设计 • 硬件选型 • 程序设计 • PLC仿真 • 项目总结与展望
目录
Part
01
项目背景与意义
机械手控制系统优势
效率高、准确高
高生产自动化程度,有利于 提高材料的传送、工件的装 卸、刀具的更换以及机器的 装配等的自动化程度,提高 生产效率,降低生产成本
改善劳动条件
避免人身事故,代替人安全 地在高温、高压、低温、低 压、有灰尘、噪声、臭味、 有放射性或有其它毒性污染 以及工作空间狭窄等场合中 完成工作。
自动化程度高,成本低
采用PLC控制系统,实现远 程监控和自动调节,提高运 维效率,降低了人工成本。
Part
02
整体方案设计
系统硬件设计
plc选型 机械手的位置反馈是开关量控制,所需的I/0点数量并不多,所以使用一般 的小型plc的选择就可以了。由于所需要的 I/0 点数分别为 20 点和12 点, 因此本设计选用西门子S7-226来实现控制
2)通过下面一排拉杆模拟PLC输入信号,通过观察Q点输出亮灯情况检查程序。
组态制作
新建一个工程,触摸屏的类型选择TPC7062TD
2)制作主页面。
组态制作
在设备窗口中添加-通用串口父设备和西门子_S7200PPI
2)双击西门子_S7200PPI,增加设备通道,并且连接对应的数据库,是PLC与触摸屏互相通信。
Part
03
硬件选型
plc硬件接线图简图
选型与配置方案
PLC控制器
使用一般的小型plc的选择就可以 了。由于所需要的 I/0 点数分别 为 20 点和12 点,因此本设计选 用西门子S7-226来实现控制。
《2024年基于PLC的工业机械手运动控制系统设计》范文

《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,机械手运动控制系统在工业生产中扮演着越来越重要的角色。
传统的机械手控制系统通常采用单片机或嵌入式系统进行控制,但由于其处理能力和稳定性的限制,已经无法满足现代工业生产的高效、精确和可靠的要求。
因此,本文提出了一种基于PLC(可编程逻辑控制器)的工业机械手运动控制系统设计。
该系统采用先进的PLC技术,能够有效地提高机械手的控制精度、稳定性和可靠性,满足现代工业生产的需求。
二、系统设计1. 硬件设计本系统硬件部分主要包括PLC控制器、机械手本体、传感器、执行器等部分。
其中,PLC控制器是整个系统的核心,采用高性能的PLC模块,能够实现对机械手的精确控制。
机械手本体包括手臂、手腕、抓手等部分,通过执行器进行驱动和控制。
传感器则用于检测机械手的运动状态和位置信息,为控制系统的精确控制提供支持。
2. 软件设计软件部分是整个系统的关键,它决定了机械手的运动方式和控制精度。
本系统采用PLC编程软件进行程序设计,通过编写梯形图或指令代码来实现对机械手的控制。
程序包括主程序和控制程序两部分。
主程序负责控制整个系统的运行流程,而控制程序则负责实现对机械手的精确控制。
3. 控制策略本系统采用基于位置的控制策略,通过传感器实时检测机械手的位置信息,将位置信息与目标位置进行比较,计算出位置偏差,并通过执行器对机械手进行精确的控制。
同时,系统还具有速度控制和力控制等功能,能够根据实际需求进行灵活的调整和控制。
三、系统实现1. 硬件连接硬件连接是整个系统实现的基础。
首先需要将PLC控制器与机械手本体、传感器、执行器等部分进行连接,确保各部分之间的通信和信号传输畅通。
同时,还需要对硬件设备进行调试和测试,确保其正常工作。
2. 程序设计程序设计是整个系统的核心部分。
根据实际需求和机械手的运动特性,编写相应的梯形图或指令代码,实现对机械手的精确控制。
基于PLC的搬运机械手控制系统的设计
基于PLC的搬运机械手控制系统的设计本文是基于PLC的搬运机械手控制系统的设计。
根据搬运机械手控制系统给出了控制流程图、阐述了用FX2N-1PG作上位机控制步进电机按一定角度旋转原理、用PLC作上位机控制伺服电机动作原理。
详细描述了基于PLC的搬运机械手控制系统的设计的硬件接线图和设计程序。
并进行了试验验证。
该设计合理规范并能实现搬运机械手控制系统的控制要求。
标签:S7-300PLC 步进电机伺服电机FX2N-1PG模块细分定位脉冲搬运机械手控制系统主要由日本三菱公司的FX2N系列PLC的特殊功能模块FX2N-1PG、步进驱动器、步进电动机和气动控制系统实现运行控制,具有抓取、放松、上升、下降和180°回旋功能,并能沿丝杆导轨做左右水平移动,同时配合伺服驱动器、、伺服电机将成品物料送到指定仓库各站点。
控制系统示意图:一、用PLC控制搬运系统的设计原理搬运机械手系统运用日本三菱公司的FX2N系列PLC对机械手进行一系列的控制,最终目的是把物料准确的送入指定仓库。
要实现准确定位主要涉及到FX2N-1PG模块的定位功能,步进驱动、步进电机和伺服驱动、伺服电机的动作原理。
1.定位脉冲输出模块FX2N-1PGFX2N-1PG定位脉冲输出模块,可输出一相脉冲数、频率可变的定位脉冲(最大100KHz,脉冲量32位),通过连接伺服电机或步进电机驱动器能实现独立1轴的简单定位控制。
首先了解PLC与1PG的体系结构关系。
FX2N-1PG是独立于PLC主机外的扩充模块,以数据总线连接。
模块依据安装位置先后自动设为K0~K7编号地址,所以必须有特殊的PLC数据写入指令,再配合时序及逻辑控制写入FX2N-1PG 寄存器内。
2.用PLC作上位机控制步进电机动作设计原理搬运机械手的定位控制可由PLC、步进驱动和步进电动机实现运行控制。
机械手运行过程为:回原点——定位运行——返回停止。
在机械手运行进程中,若碰到相应方向的极限开关时,机械手立即停止。
《2024年基于PLC的工业机械手运动控制系统设计》范文

《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,PLC(可编程逻辑控制器)已成为工业控制领域中最重要的技术之一。
工业机械手作为自动化生产线上重要的执行机构,其运动控制系统的设计直接关系到生产效率和产品质量。
本文将详细介绍基于PLC的工业机械手运动控制系统设计,包括系统架构、硬件配置、软件设计以及实际应用等方面。
二、系统架构设计基于PLC的工业机械手运动控制系统采用分层式结构设计,主要包括上位机监控系统、PLC控制器和机械手执行机构三个部分。
其中,上位机监控系统负责人机交互、数据监控和系统管理等功能;PLC控制器负责接收上位机指令,控制机械手的运动;机械手执行机构包括电机、传感器、气动元件等,负责完成具体的动作。
三、硬件配置1. PLC控制器:选用高性能、高可靠性的PLC控制器,具备强大的运算能力和丰富的I/O接口,以满足机械手运动控制的需求。
2. 电机:根据机械手的具体需求,选用合适的电机类型和规格,如伺服电机、步进电机等。
3. 传感器:包括位置传感器、速度传感器、力传感器等,用于检测机械手的运动状态和外部环境信息。
4. 气动元件:包括气缸、电磁阀等,用于实现机械手的抓取和释放等功能。
四、软件设计1. 编程语言:采用PLC的编程语言,如梯形图、指令表等,进行程序编写和调试。
2. 控制算法:根据机械手的运动需求,设计合适的控制算法,如PID控制、轨迹规划等,以实现精确的运动控制。
3. 上位机监控系统:开发上位机监控软件,实现人机交互、数据监控和系统管理等功能。
监控软件应具备友好的界面、实时的数据显示和报警功能。
4. 通信协议:建立PLC控制器与上位机监控系统之间的通信协议,实现数据的实时传输和交互。
五、实际应用基于PLC的工业机械手运动控制系统在实际应用中表现出良好的性能和稳定性。
通过上位机监控系统,操作人员可以方便地监控机械手的运动状态和生产数据。
PLC控制器根据上位机的指令,精确地控制机械手的运动,实现高精度的抓取、搬运、装配等任务。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计PLC(可编程逻辑控制器)是一种广泛应用于自动化领域中的控制设备,它拥有可编程的逻辑控制功能,具有高精度、高可靠性、动态稳定性好等特点。
在制造业中,搬运机械手广泛应用于对生产线上产品的搬运,包装和装载等操作。
基于PLC 的搬运机械手控制系统就是将PLC作为核心控制器,实现对搬运机械手的控制和调节,从而提高其工作效率和精度。
搬运机械手控制系统设计基于PLC的搬运机械手控制系统的设计由以下几个部分组成:1. 机械结构设计:机械结构是搬运机械手控制系统的基本构成部分,包括机械臂、传动机构和夹持机构等。
机械结构的设计需要考虑机械臂的长度、强度、重量、运动速度和角度等参数。
传动机构包括电机、减速器、传动轮等,其作用是将电机转换为机械臂的运动。
夹持机构用于夹持待处理的物品,实现搬运和装载等操作。
2. 电气设计:电气设计包括控制系统的电源、控制器、传感器和执行器等。
控制系统的电源是供电保障,必须保证输入电压稳定。
控制器根据输入信号实现对机械手的控制,包括控制信号的生成、控制程序的调试和PID调节等。
传感器用于实时获取机械手的位置、状态和运动方向等信息。
执行器执行机械手的运动和夹持等功能。
3. 软件设计:PLC控制器是基于程序的工作,程序的编写需要考虑搬运机械手的不同工作场景和判据,以实现自动化控制。
软件设计主要包括程序设计和逻辑控制等。
程序设计是根据搬运机械手的功能和运动方式编写程序,以实现对机械手的控制、调节和监测。
逻辑控制是根据具体工作场景进行逻辑判断,实现机械手的自动化控制动作。
基于PLC的搬运机械手控制系统的特点基于PLC的搬运机械手控制系统在制造业中得到广泛应用,其具有以下特点:1. 稳定性好:PLC控制器控制器稳定性好,能够长时间连续工作,不易出现故障。
2. 精度高:PLC控制器具有高精度的控制能力,能够控制搬运机械手的精度和速度,以及对物品的判别和定位等。
3. 可编程性强:PLC控制器采用可编程的逻辑控制,能够为不同的工作场景编写程序,实现自动化控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的搬运机械手控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好的节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要是曲轴在两条生产线之间搬运任务的搬运机械手控制系统进行设计。
采用了电气一体化的设计方案,使用带自锁功能的气缸实现了机械手对工件的抓放和保证了在断气状态下机械手状态的保持,通过伺服电机来实现机械手在水平、竖直方向快速精确的移动。
采用SIEMENS公司的SIMATIC S7-200系列PLC 作为核心控制器,外扩定位模块EM253模块对伺服电机进行精确的定位控制,从硬件和软件两个方面进行设计,完成了PLC在搬运机械手中硬件连接,I/O点分配和应用程序的设计,实现了机械手的上电初始化、零点复位、故障报警、手动运行、半自动运行和在无人看守时的自动运行。
最终达到设计要求,完成搬运目的。
关键词搬运机械手定位模块EM2253控制系统可编程PLC SIMATIC S7-200 系列PLC 核心控制器。
目录目录 (2)1引言 (1)1.1 搬运机械手的应用简况 (1)1.2机械手的应用意义 (2)2系统设计 (2)2.1系统结构及流程 (2)2.2系统主要部件选择 (4)2.2.1气缸的选择 (5)2.2.2阀门的选择 (6)2.2.3行程开关的选择 (6)2.2.4接近开关的选择 (6)2.2.5驱动电机的选择 (6)3控制系统的硬件设计 (7)3.1控制系统功能 (7)3.2控制系统硬件结构 (8)3.2.1位控模块 (8)3.2.3控制系统硬件结构 (9)3.3操作面板的设计 (9)3.4 PLC系统设计 (11)3.4.1 PLC 的I/O 分配表 (11)3.4.2 PLC 的I/O 接线图 (11)3.5运动控制系统的实现 (12)3.6控制系统电路设计 (17)4系统软件的设计与实现 (19)4.1系统工作方式 (19)4.2程序设计 (19)4.2.1主程序设计 (19)4.2.2初始化子程序设计 (20)4.2.3复位子程序设计 (20)4.2.4报警子程序设计 (21)4.2.5手动运行子程序设计 (21)4.2.6半自动运行子程序 (22)4.2.7自动子程序设计 (23)5结束语 (25)致谢 (26)参考文献 (27)附录1系统配件清单 (28)附录2程序清单 (28)1引言1.1搬运机械手的应用简况在现代工业中,生产过程的机械化、自动化已成为突出的主题。
在机械工业中,加工、装配等生产是不连续的。
专用机床是大批量生产自动化的有效办法,程控机床、数控机床、加工中心等自动化机械是有效解决多品种小批量生产自动化的重要办法。
但除切削加工本身外,还有大量的装卸、搬运、装配等作业,有待于进一步实现机械化。
据资料介绍,美国生产的全部工业零件中,有75%是小批量生产;金属加工生产批量中有四分之三在50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。
从这里可看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而产生的。
机械手可在空间抓放物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
国内外机械工业、铁路部门中搬运机械手主要应用于以下几方面:(1)热加工方面的应用热加工是高温、危险的笨重体力劳动,很久以来就要求实现自动化。
为了提高工作效率,和确保工人的人身安全,尤其对于大件、少量、低速和人力所不能胜任的作业就更需要采用机械手操作。
(2)冷加工方面的应用冷加工方面机械手主要用于柴油机配件以及轴类、盘类和箱体类等零件单机加工时的上下料和刀具安装等。
进而在程序控制、数字控制等机床上应用,成为设备的一个组成部分。
最近更在加工生产线、自动线上应用,成为机床、设备上下工序联接的重要于段。
(3)拆修装方面拆修装是铁路工业系统繁重体力劳动较多的部门之一,促进了机械手的发展。
目前国内铁路工厂、机务段等部门,已采用机械手拆装三通阀、钩舌、分解制动缸、装卸轴箱、组装轮对、清除石棉等,减轻了劳动强度,提高了拆修装的效率。
近年还研制了一种客车车内喷漆通用机械手,可用以对客车内部进行连续喷漆,以改善劳动条件,提高喷漆的质量和效率。
近些年,随着计算机技术、电子技术以及传感技术等在机械手中越来越多的应用,工业机械手已经成为工业生产中提高劳动生产率的重要因素。
1.2机械手的应用意义由于工业自动化的全面发展和科学技术的不断提高,对工作效率的提高迫在眉睫。
单纯的手工劳作以满足不了工业自动化的要求,因此,必须利用先进设备生产自动化机械以取代人的劳动,满足工业自动化的需求。
其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。
在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。
目前,机械手已发展成为柔性制造系统fms和柔性制造单元fmc中一个重要组成部分。
把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
因此,进行机械手的研究设计具有重要意义。
2系统设计2.1系统结构及流程本课题的研究主要是将摩托车发电机的曲轴从一个自动生产线搬运到另一个自动生产线的控制系统。
两生产线的布置和具体位置参数如图2-1所示:图2-1机械系统整体布局示意图机械手主要由手部、腕部、升降部、滑动部、机座和控制箱,以及其它附件组成。
其中手部为四指结构,其运动由具有自锁功能的夹紧气缸完成;升降部以导轨为导向装置,其运动由伺服电机驱动丝杠来完成;滑动部也是以导轨为导向装置,其运动由伺服电机驱动齿轮在齿条上滚动来完成。
PLC和相关控制器件安装于控制箱内,通过电缆和信号线与机械手进行联接。
机械手的定位采用脉冲数来控制,升降运动和滑动都有快慢速调整,调整位置也由脉冲数来控制,而速度由脉冲频率调整。
在料架 1 和料架2上分别安装接近开关,进行生产线上有无工件的检测,满足在料架1有工件时机械手才进行下降和抓取,料架2上无工件时机械手才下降放下工件。
机械手还满足在断气和掉电时能够自锁,保持当前的状态。
系统上电后机械手开始初始化,初始化完毕后选择工作方式,分别为手动模式,半自动模式,自动模式。
手动模式工作下,操作员可以通过控制面板控制机械手的单步运动和零点复位,能够在机械手故障时进行检修。
半自动工作方式下,只要操作员选择半自动工作方式,然后按下启动按钮,机械手首先会零点复位,然后检查料架1有工件,机械手下降抓取工件,上升前进,检测料架2上无工件机械手下降放下工件,返回原点,一个周期的动作完成,机械手停机。
自动方式开始工作下,按下启动按钮,两台伺服电机通电,滑台、升降台、气缸等回到原位,气压表显示正常。
机械手运动到上、左原点位。
当检测到料架1上有工件时,电机1反转,升降台快速下降,达到一定脉冲数后减速,到达下工位2时,电机1停转;气缸伸出夹紧工件,当气缸压力到达一定程度时压力传感器得电表明工件夹紧;电机1正转,升降台先快速上升,达到一定脉冲数后时减速,当到达上原点时,电机1停转,升降台停止;电机2反转,滑台快速前进,达到一定脉冲数后滑台减速,到达右工位时电机2停止;当检测到生产线2无工件时,电机1反转,升降台快速下降,达到一定脉冲数后减速,到达下工位1时电机1停转;气缸缩回放开工件,压力传感器失电表明工件已松开;电机1正转,升降台上升,先快速后慢速,当到达上原点时电机1停转,升降台停止;电机2正转,滑台返回到初始位置,电机2停止。
一个工作流程结束。
机械手的工艺流程如图2-2所示。
2.2系统主要部件选择工业机器人驱动系统的设计往往要受到作业环境条件的限制,同时还要考虑成本因素的影响以及所能达到的技术水平。
驱动元件是伺服系统的重要组成部分,是系统的执行元件,它的作用是把驱动控制线路的电信号转换为机械运动。
整个伺服系统的调速性能、动态特性、运动精度等均与驱动元件有密切关系。
常用的驱动方式主要有液压驱动、电气压驱动和电-液驱动三种基本类型。
结合各种驱动类型的特点和机械结构设计与传动类型的选择。
本机械手采用电气结合的驱动方式。
其中,机械手的升降和平移都采用交流伺服电机驱动,手部的开合采用气缸驱动。
选择自动模式图2-2机械手工艺流程图2.2.1气缸的选择夹紧装置是使手爪开、闭动作的动力装置。
根据机械手部的夹紧力和手部张开后指尖距离,选用FESTO公司生产的两端带有终端可调缓冲装置的SNU-50-100-PPV-A 型双作用气缸。
并配有夹紧装置和行程开关。
如图2-3所示为气缸。
活塞直径D =©50mm,活塞杆直径d=© 16mm,行程长度L = 100mm,驱动压力p=6bar=6 X05Pa 2.2.2阀门的选择阀门是为气缸提供的,气缸配备两个一位单通阀门,为了保证在断气的状态下不影响气缸内部的气压,所以选用气开阀,根据经验选用SMC公司的VZ110气开阀。
2.2.3行程开关的选择行程开关选用施耐德公司XCRA15型号的行程开关2.2.4接近开关的选择为了提高系统的可靠性和动作执行的准确性,选择OMRON公司的E2E-X5ME2型接近开关。
它的具体参数如下:(1)检测距离:5mm(2)电源电压:DC12〜24V(3)消耗电流:小于13mA(4)检测物体:磁性物体(5)响应时间:0.3~1ms(6)输出方式:NPN输出接近开关接线图如图2-4所示。
图2-4接近开关接线图E2E-X5ME2型接近开关为三线的NPN输出型开关,输出三线分别为棕线、黑线、蓝线,其中在棕线和黑线之间接负载,本系统中棕线接在PLC的24V电源正极,蓝线接在输入端点上。
2.2.5驱动电机的选择直流伺服电机由于存在机械换向器和电刷,降低了电机运行的可靠性,加重了维护和保养负担。
而交流异步电机虽然结构简单、成本低廉、无电刷磨损、维修方便,但调速问题一直没有得到经济合理的解决。
近十年来,由于调频等调速方法发展很快,使其调速范围和成本与宽调速直流伺服电机接近,因此,交流伺服电机以其优良的控制性能和高可靠性在数控系统中得到了越来越广泛的应用。
为了方便设计和维修,升降电机与水平移动电机选用同一型号,根据经验选用松下公司MinasA4系列全数字式交流伺服电机和驱动器。