通信卫星切换控制技术研究及仿真
基于STK的通信卫星动态链路分析及仿真
基于STK的通信卫星动态链路分析及仿真摘要本文将通过卫星通信链路应用仿真的示例,来介绍STK在通信卫星动态链路分析与应用方面的具体用法。
关键词STK;通信卫星;链路0 引言随着航空航天技术的迅速发展,太空已经成为国家战略利益拓展和维护国家安全的至关重要的战略领域。
对抗敌方军事通信卫星和相关的商用通信卫星,阻断战区内敌方的卫星通信链路,对于夺取战场信息控制权具有重要意义。
研究和分析卫星通信链路的特点,对于深入探寻太空信息领域的制胜之策,对未来的信息作战具有十分重要的意义[2]。
因此,本文建立不同卫星星座模型进行仿真,并设置和修改了参数,通过仿真比较不同的系统的覆盖特性,来模拟真实的运行环境和实验,以增大设计的自由度,节约成本。
因此,具有较强的理论研究意义和实际参考价值[3]。
1 通信卫星动态链路仿真STK为通信应用提供一个完整的通信卫星动态链路分析实用示例。
通信卫星链路仿真过程及参数设置:首先,建立通信卫星场景对象。
设置场景Basic类Animation属性页中的Time Period为60sec。
向场景中添加3个卫星对象:GEO1、GEO2和GEO3。
设置GEO1该属性RAAN为0deg。
GEO2该属性设置RAAN为120deg,GEO3则是240deg。
然后,向3个卫星对象各自添加一个发射机对象GEOTrans1、GEOTrans2和GEOTrans3。
双击GEOTrans1,设置发射机对象GEOTrans1的Basic类Definition 属性Type选中“Complex Source Transmitter”属性值。
单击“单波束天线”对话框中的“Details”按钮,将Beam width设置为12.5deg,选择Use Beam width复选框,并在Antenna文本中输入0.550。
GEOTrans2、GEOTrans3参数设置与GEOTrans1完全相同。
最后,向通信卫星场景中添加3个地面站对象:Washington、Beijing和Tokyo。
LEO卫星网络中无缝切换管理技术研究
Re e r h o e m l s a do e a a e e t Te hn l g s a c n S a e sH n v r M n g m n c o o y
i n LE0 a e lt t r s S t lie Ne wo k
W ANG i g ln’ .CAO Zh — a g Jn —i ig n
Ke r y wo ds: Saelt t r tli newo k;S a e sha o e ;Pa k tl s ae;Ha d v rd ly e e mls nd v r c e o sr t n o e ea
0 弓 言 l
动 性 管 理 协 议 , 其 应 用 到 星 座 网 络 中 处 理 网的返 回可路 由过程 中带来 的延 时 , 接影响 了 MN 网络 层切换 延时 , 直 引起 丢包 率增 大 , 户 Q S降 级 等严 重 问 题 。 因此 , 必要 用 o 有
Ab ta tT e mao h rcmig fMI v nL O stl t n t rsaeteln a d v rd lya d hg a d vr sr c : h jrs oto n so P 6 i E aele ewok r h o g h n o e ea n ih h n oe i
达 7 % 以上 。 5
关 键 词 :卫 星 网 络 ;无缝 切 换 ;丢 包 率 ;切换 延 时 中 图分 类 号 :T 9 7 2 N 2 . 文 献 标 识 码 :A 文章 编 号 :1 0 —3 8 2 1 ) 30 6 一5 0 0 1 2 ( 0 1 0 - O0 6
DO I: l 3 73 i s 1 0 l 8. 01 03. 0. 8 / . s n. 0 0一 32 2 1. 031
卫星通信中的信号仿真与处理技术研究
卫星通信中的信号仿真与处理技术研究近年来,随着航天技术和通信技术的不断发展,卫星通信已经成为了人们工作和生活中必不可少的一部分。
而在卫星通信中,信号仿真与处理技术则是非常重要的一项技术,它可以有效地模拟和处理各种信号,确保卫星通信的稳定性和可靠性。
一、卫星通信信号仿真的分类卫星通信中的信号仿真通常可以分为三种类型,分别为信道仿真、载波仿真和信号仿真。
信道仿真主要是对卫星通信中的信道进行模拟和分析,以评估信道性能并提高通信质量。
信道仿真可以考虑多径效应、衰落等因素,从而结合实际情况模拟出最优的信道传输方案。
载波仿真则是对卫星通信的载波进行模拟和分析。
卫星通信的载波通常会采用高频波长,而载波仿真则可以模拟这些高频波长的传输和信号处理。
信号仿真则是模拟卫星通信中的各种信号,包括声音、数据、图像等。
信号仿真可以较为真实地模拟各种复杂的信号,帮助通信人员预测和解决在卫星通信中可能出现的问题。
二、卫星通信信号处理的流程卫星通信中的信号处理通常可以分为四个步骤,分别为信号采集、处理、网络传输和输出。
信号采集是指通过卫星接收器采集卫星传输过来的信号,将其转换成数字信号,并进行初步处理。
信号处理则是对数字信号进行各种操作和处理,例如滤波、降噪、调制解调等。
通过信号处理,可以有效地提高信号的质量和稳定性。
网络传输是指将经过处理的数字信号通过卫星网络传输到目标终端,例如电话、电视机等等。
输出则是将卫星传输过来的数据、声音、图像等信息在目标终端上进行输出。
三、卫星通信信号仿真和处理技术的研究进展随着无线通信技术的不断发展,卫星通信的信号仿真和处理技术也在不断进步。
在信号仿真方面,现代化代数方法也被越来越多地应用于卫星通信中的信号仿真。
例如,现代化代数方法可以通过约化方法将某类常规滤波器的设计和优化问题转化为一类代数最优化问题,从而简化了设计和优化的过程。
在信号处理方面,自适应滤波技术也被广泛应用。
例如,自适应滤波可以根据实时穿透信号的特点自主调整滤波器系数,从而更好地降低多径效应和其他干扰效应,提高信号的稳定性和可靠性。
低轨卫星通信系统中快速终端的切换技术
Ab ta t sr c :A EO o L c mmu iain s se s p ot g fs— vn emias wa t de .Ba e n ti y tm,t nc t y tm u p ri atmo i g tr n l o n s su id sd o hs s se wo
关键词:卫星通信 ;快速 终端 ;低 轨;切换 中图分类号 : N9 7 T 2 文献标识码: A 文章编号 : 0 04 6 (0 60 .100 10 —3 X 2 0 )50 2 —6
Ha d v rt c n q eo s ・ o i e m i a n o e e h i u ff tm v ngt r n l a
第 5期
李庆 等 :低轨 卫 星通信 系统 中快 速 终端 的切 换技术
结合我国的地理位置 ,采用两条线路:北京——洛 杉矶 ( 横跨太平洋 ,中高纬度 )以及北京——纽约 ( 过北极、加拿大 ,高纬度 、极地 ) 。通过仿真, 得到各种情况下的通信时延 ( 向,见上文 ) 双 、切
本文分别 以 “ 全球星 ”系统 ( l a t )和铱 Go la b sr 星系统 ( i u Id m)为选用星座 ,在快速终端穿过某 ri 颗 星的覆 盖区 ,需要切换到另一颗 星服 务的时
一
目前卫星通信系统中的终端大多是慢速终端。所谓 慢速 ,是指移动速度在每小时几十公里以下,如手
c s fGlb ltra dIiim. nod r ofn u erdfee t fe t nt es se c p bl yi i ee t n i n n。 aeo o asa n du I r e do t i i rn cs y tm a a it df rn vr me t r ti h t e o h i n e o
卫星通信中的高阶调制技术研究
卫星通信中的高阶调制技术研究张曼倩;刘健;杨博;邹光南【摘要】In this paper we sum up the high order modulation technologyfor the satellite communication protocol GMR-1 and DVB, study the principle of 16QAM, 16APSK, 32APSK modulation, analyze the satellite channel models, build AWGN channel and Rician-K channel by using Matlab that simulate the transceiver of these high order modulation signals and acquire different modulation error performance results under different channel environment, The simulation result has a certain significance on the actual satellite communication systems which adopt higher order modulation technology.%总结了卫星通信协议GMR-1、DVB中的高阶调制技术,研究了16QAM、16APSK、32APSK调制原理,分析了卫星信道模型,利用Matlab分别搭建AWGN信道和Rician-K信道下各高阶调制信号的收发,得到不同的调制方式在不同信道或在不同衰落因子同一信道下的误码性能。
本文的仿真结果对实际卫星通信系统采用高阶调制技术有着一定的借鉴意义。
【期刊名称】《电子设计工程》【年(卷),期】2014(000)021【总页数】4页(P114-117)【关键词】卫星通信;高阶调制;衰落信道;误码性能【作者】张曼倩;刘健;杨博;邹光南【作者单位】航天恒星科技有限公司北京 100086;航天恒星科技有限公司北京100086;航天恒星科技有限公司北京 100086;航天恒星科技有限公司北京100086【正文语种】中文【中图分类】TN91卫星通信系统对地面通信系统有着补充的作用,在一些紧急的灾害、战争情况下尤为重要。
基于OPNET的低轨卫星星座通信系统仿真研究
基于OPNET的低轨卫星星座通信系统仿真研究胡宸华;黄圣春;王玲;孟祥龙【摘要】基于OPNET搭建了一个低轨道卫星星座移动通信系统仿真平台,介绍了网络拓扑、节点模型、进程模型和无线链路模型的相关设计过程,并结合STK软件生成的极地圆轨道模型,对自主设计的一套低轨星座移动通信协议进行了验证.仿真结果表明,该平台能够正确模拟LEO星座通信系统中寻呼、建链等通信过程,以及长时延、频繁切换等卫星通信的特性,为低轨星座移动通信协议研究提供了有力支撑,可为卫星通信仿真工作提供借鉴和指导.【期刊名称】《通信技术》【年(卷),期】2018(051)010【总页数】7页(P2382-2388)【关键词】低轨卫星网络;通信协议;OPNET建模;无线链路【作者】胡宸华;黄圣春;王玲;孟祥龙【作者单位】湖南大学电气与信息工程学院,湖南长沙420082;国防科技大学电子科学学院,湖南长沙410073;湖南大学电气与信息工程学院,湖南长沙420082;海军潜艇学院,山东青岛266199【正文语种】中文【中图分类】TN927+.230 引言低轨道(Low Earth Orbit,LEO)卫星星座移动通信系统在军用和民用上都具有重大意义,是“一带一路”等国家战略中不可或缺的一环。
相比国外低轨卫星移动通信的高速发展,国内的LEO通信系统建设刚刚起步[1]。
通过软件仿真进行验证测试,对LEO星座移动通信系统建设具有重要的指导意义。
OPNET是一款主流的通信仿真软件,拥有丰富的无线网络和有线网络仿真模型,但在卫星仿真上却缺少相关功能模块[2-3]。
当前,基于OPNET的LEO网络仿真大多基于固定的卫星节点,甚至用有线节点来模拟低轨卫星通信,没有根据LEO卫星高速运动的特点来真实反映卫星通信链路和服务卫星的切换过程[4-5]。
本文旨在对OPNET环境下的LEO通信系统搭建过程进行分析,为低轨卫星移动通信协议设计的仿真验证工作提供支撑。
基于Simulink实时工具的小卫星姿控物理仿真
模 拟 星上 的光 学 敏 感 器 的 姿 态信 息 输 出 。执 行 部
件 主要 有框 架 控制 力矩 陀螺 、 力器 等 。姿态 控制 推
程 序 在 台上仿 真计算 机 中运 行 , 接收并 处 理敏感 器
信息 、 计算控制指令并发送。小卫星仿真 中的主要 工作 内容 如 下 l 4: _ J 3 _ a小卫 星 轨道环 境 分析 。 .
地 面验证 。
b 小卫 星姿 态建模 。 . 小 卫 星姿 态 一 般 以非 线 性 六 自由度 方 程来 描 述, 而特 殊情 况下 要考 虑挠 性 和液体 晃动 的影 响 。 e性能 分析 和系 统控 制方 案 的选 择 。 . 通 过仿真 可 以实现 系统 的控 制 , 括 明确小 卫 包 星控 制 系统所 要 达到 的控制 指标 、 用 的姿态测 量 采 敏感 器 的精度 需 求 及 组 合 形式 、 相应 的确 定 算 法 、 姿 态控 制 的算 法 、 行 机 构 的种类 、 矩精 度 和 角 执 力 动量 的容 限 、 制计 算 机 的 性 能 、 制 周期 的确 定 控 控 以及 控 制器稳 定性 分析 等 。
对于 中低 太 阳 同步近 圆轨道 的空间 环境 , 小卫 星将 受到 较 大的 气 动力 矩 、 剩磁 力 矩 、 力梯 度 力 重 矩 和 较小 的太 阳光 压 力 矩 。而 相 应 的 仿 真 实验 中 要 对 系统所 在 环境 的 干扰进 行评 估 和测 量 。
收 稿 日期 :0 1 6—1 2 1 —0 O
可表示 为 :
H =.o 1 t () 1
仿真控制 对象 是转 动 惯量 约 为 [0 12 . 2 . 1 6 2 .]g m ; 中俯仰轴为单轴气浮平 台模拟, 34 k ・ 2其 其
VSAT卫星通信网络系统的研究分析
VSAT卫星通信网络系统的研究分析【摘要】本篇文章主要围绕VSAT卫星通信网络系统展开研究分析。
引言部分介绍了背景、研究意义和研究目的。
接着,在正文部分详细介绍了VSAT卫星通信网络系统的基本原理、关键技术、应用领域、发展趋势和案例分析。
最后在结论部分总结了VSAT卫星通信网络系统的研究成果、发展前景以及提出建议和展望。
通过对VSAT卫星通信网络系统的研究分析,可以更好地了解其在通信领域的重要性和发展趋势,为相关领域的研究和应用提供参考。
【关键词】VSAT卫星通信网络系统、基本原理、关键技术、应用领域、发展趋势、案例分析、研究成果、发展前景、建议和展望。
1. 引言1.1 背景介绍VSAT(Very Small Aperture Terminal)是一种通过卫星通信技术进行数据传输的系统,其主要特点是使用较小的天线接收和发送信号。
随着信息技术的发展和应用需求的增加,VSAT卫星通信网络系统在各个领域得到了广泛应用。
背景介绍中,我们将探讨VSAT卫星通信技术的起源和发展历程,以及其在现代通信网络中的地位和作用。
VSAT技术最早起源于20世纪70年代,当时主要用于企业的远程通信和数据传输。
随着通信技术的不断进步和卫星通信网络的发展,VSAT系统逐渐普及,并被应用于军事、能源、金融、教育、医疗等各个领域。
在全球化和信息化的大背景下,VSAT卫星通信网络系统具有高效、可靠、灵活等优势,受到越来越多企业和机构的青睐。
随着科技的不断进步和市场需求的不断增长,VSAT卫星通信网络系统也在不断发展和完善。
未来,随着5G技术、物联网和人工智能的兴起,VSAT系统将迎来更广阔的发展空间和更多的应用场景。
通过对VSAT卫星通信技术的深入研究和探讨,可以更好地了解其在通信领域的优势和局限,为未来的发展提供有益的借鉴和指导。
1.2 研究意义VSAT卫星通信网络系统的研究意义还在于其在军事、航空航天、海洋等领域的广泛应用。
在军事领域,VSAT卫星通信网络系统可以提供高度加密和安全性的通信方式,保障国家安全。
基于OPNET和HLA的卫星通信网络仿真
基于OPNET和HLA的卫星通信网络仿真低轨卫星通信系统不仅能够实现全球连续覆盖乃至全球多重连续覆盖,而且在时延、损耗等方面具有较大的优势,因此不管是在民用还是在军用上都有很好的发展前景。
由于卫星通信网络的结构和功能的复杂性,技术更新也越来越快,采用仿真手段来对卫星通信网络进行研究就很有必要了。
本文研究了OPNET中的仿真建模方法和卫星的轨道理论、LEO星座的连续覆盖和切换特性,从理论上对星座网络动态拓扑变化进行分析,然后在OPNET软件中建立了铱卫星网络仿真系统模型,包括对地面站网络节点、卫星节点、路由节点进程、无线链路信道的建模及业务的配置,并对仿真得到的路由表、信噪比、端到端时延及业务传输流量等结果进行分析,不仅为研究网络行为提供了准确的量化模型,而且无论从理论上还是从实验上都为进一步研究低轨卫星网络起到了指导作用。
本文还研究了在高层体系结构下如何实现不同的程序或系统之间的数据交换、时间推进、仿真管理等分布仿真的关键技术。
本文的另一个重点是设计了一个由控制联邦成员和OPNET仿真联邦成员构成的HLA联邦,通过OPNET中的HLA模块,使得OPNET网络模型与其他程序联合仿真,进行数据交互并保持时间同步,联邦中的控制成员为铱星网络系统中侦查卫星提供轨道数据,并接收OPNET仿真结果,实现了基于HLA体系结构的OPNET协同仿真。
通过此方法我们能够实现将一个复杂体系中的运行在多台计算机下的多个功能模型聚合起来,形成一个整体进行仿真。
Ka频段卫星通信自适应传输技术研究
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
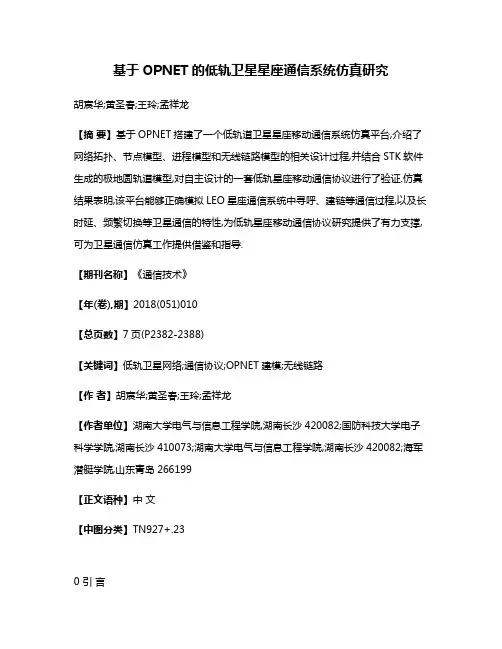
(54.93,-17.4)的两个用户进行通话,图 3 为截取的用户 user_2 在某一仿真时间段内的星间星内切换时延比较,可以 观察到星间切换时延远大于星内切换时延。星间切换时延的
均值跟该用户与信关站控制子系统相对位置有关,图 3 说明
该用户与信关站之间有至少两跳的卫星转发距离。由于软件
对节点做理想化处理,所以省去了节点内的处理时延,实验
相对于已经搭建好的国内透明转发平台,专门针对国外 的通信切换控制进行研究,并针对大量全球用户通信进行了 仿真,达到了预期性能指标。
1 切换系统设计
切换系统包括位于国内的信关控制子系统、星上处理以 及相应的国外切换流程。整个切换控制是由信关控制子系统 和卫星的星上处理模块配合切换流程实现的。 1.1 信关控制子系统
现了该方案。实验结果充分证实了该方案的可行性。
【关键词】星座卫星;切换;信关控制子系统;仿真
【中图分类号】TN91
【文献标识码】A
【文章编号】1002-0802(2010)08-0152-03
Control Technology and Simulation for Constellation Satellites Handoff
仿真时间为 24 小时 ,用户为低速移动用户。稳定后的 切换成功率达到了 98%以上,说明成功实现了通信切换控制,
153
且随着用户呼叫间隔的增加,切换失败概率有所降低。
国外的数据一般要经过卫星最少一跳传回国内,所以时
延相对于国内透明转发明显要多,为便于分析,随机选取经
纬 度 位 置 分 别 为 user_1: ( 34.81 , -8.77 ) 和 user_2:
别为卫星节点处理时延,星际链路卫星节点间传输时延; L 为路由中卫星节点的数目。可见星际链路卫星节点间的传输
时延占据了星间切换时延的很大一部分。
2 切换控制仿真
2.1 仿真场景 仿真实验采用 opnet 10.5,该软件支持网络级仿真,很
适合全球通信这样大型的复杂系统仿真。仿真中系统采用 24 星 Walker 星座方案,该方案将 24 颗卫星分为三个轨道,对 全球南北纬 45°之间区域的覆盖率可以达到 98%,仿真当中
呼叫控制模块
馈电链路 星际路由包处理 境内数据包处理
无线 星间波束 管理 切换监测
交换
位置寄存器
访问用户位 置寄存器
图 1 信关控制子系统分布示意 信关控制子系统是在通用信关站上添加的系统,所以不 会影响信关站的通用功能。图中阴影部分即为信关控制子系 统的组成部分:馈电链路里的星际路由包处理模块存储全球 用户当前服务卫星和切换目的星的 ID,为全球用户数据路由 封装提供目的星 ID。VLR 存储和更新全球用户位置资料,向 RRM 提供用户当前位置查询功能。RRM 为无线资源管理模 块,提供卫星星间波束切换监测算法,该算法通过周期性的 向 VLR 查询用户位置并结合切换策略来计算出用户当前最 佳接入卫星,并在用户端将要进行星间切换的时候才触发切 换,让用户及时接入新的卫星。 跟国内用户的切换控制不同,考虑到全球用户的信令将 要经过多跳才能路由回信关控制子系统,这需要比较大的时 延,尤其是在星际链路处于高负荷运行状态情况会更加恶 化,因此系统设计把在切换中占大部分比例的卫星内波束切 换处理放在卫星上实现,而信关控制子系统则只处理用户换 星时的切换控制和更新当前无线资源。 1.2 星上处理 星上处理专门针对全球用户,负责用户在星内波束切换 过程中涉及的资源分配、信道删除以及星际路由包产生和 转发。 卫星可以工作在两种模式下,一种是境内模式(透明转 发),另一种是境外模式(处理转发),两种模式的选择将会 依据卫星当前所在位置进行判断,而位置区的判断是依据国 内外区域来划分的。卫星将为每个接入到本卫星上的用户建 立资源管理链表,采用固定信道分配方案为用户分配资源, 并记录其经纬度。而当用户切换到其他卫星去后,该链表将 被删除,而在切换后的卫星上重新为该用户建立链表。为支 持星内波束切换,BSC 模块里采用点波束确定算法[1-2],该算 法只需要卫星记录用户经纬度和本卫星当前位置和之前位 置就能在本卫星内覆盖范围内为用户分配合适的波束和信 道。相对于信关控制子系统对同一颗星使用波束确定算法为
【Abstract】A handoff scheme for the constellation satellites global communication is proposed in this paper, and as compared with the normal scheme depending on the global gateways, this scheme, with no need for gateways in the whole world, demands only one gateway for control of the whole consteer process of the users is controlled by through coordination of the satellites and the gateway, thus remarkably reducing the handoff delay and signals costs. Based on this a simulation platform for constellation satellites systemic is built up with opnet and the proposed scheme is implemented on this platform. The experiment results prove the feasibility of the proposed scheme.
GUO Song, LIU Wei, GUO Wei
(State Key Laboratory of Anti-interference Communications, Univ.of Electron Sci&Tech. of China, Chengdu Sichuan 610054, China)
设置三轨道卫星编号为: 1 轨道为 0 ∼ 7 号卫星,二轨道为 8 ∼ 15 号卫星,三轨道为 16 ∼ 23 号卫星。
国内设置有 6 个信关站,各信关站和 HLR 由路由器互相 连接,选定位于东北地区的信关站 gw_4 为信关控制子系统。 所有位于国外用户的切换控制均由信关控制子系统处理。用 户为全球用户,用户可视卫星的最小仰角为 11.4°,每用户 的业务量为 0.1Erl,共 100 用户,则信关控制子系统的业务 量为 10Erl。 2.2 仿真及结果分析
最强信号准则进行选星然后发起。
上行链路接收来自用户的切换请求,然后再交给 BSC 处
理模块,由该模块判断切换类型。若为星内波束切换,则由
该模块分配资源,然后通过下行链路发送切换消息给用户,
用户切换成功后给卫星返回切换完成消息,BSC 再删除弃用
信道,然后产生资源更新消息给信关控制子系统用于更新无
线资源。若为星间切换,则通过星际路由发送到国内卫星,
T = Tuplink + Tdownlink + Ti _ node ,
(1)
L
L −1
∑ ∑ T = Tuplink + Tdownlink + Ti _ node + Ti _ link ,
(2)
i=0
i=0
式中: T 为切换总时延; Tuplink , Tdownlink 分别为用户到服务
星的传输时延,服务星到用户的传输时延;Ti _ node ,Ti _ link 分
收稿日期:2009-09-23。 作者简介:郭 松(1984-),男,硕士研究生,主要研究方向为移动
通信及系统;刘 伟(1978-),男,讲师,主要研究方向为 移动通信及扩频,卫星通信;郭 伟(1964-),男,博士生 导师,主要研究方向为移动通信及扩频跳频。
152
外用户分布较稀疏,信关站的资源将会出现低利用率现象, 而且考虑到全球通信的切换全部由地面系统进行控制将会 产生较大时延和过多占用星际链路资源,所以提出一种全球 通信的切换方案,该方案只需要一个信关控制子系统,并依 靠卫星上的处理功能实现全球通信的切换控制。
再通过馈电链路发给信关控制子系统,由信关控制子系统为
用户分配资源,然后发给用户切换消息,用户切换完成后通
过星际链路给信关控制子系统返回切换完成消息用于更新
无线资源[3-6]。这样星内切换是在用户和卫星间完成,而星间
切换是在信关控制子系统--卫星--用户间完成。
星内切换和星间切换时延[7]比较分别为式(1),式(2):
2010 年第 08 期,第 43 卷 总第 224 期
通信技术 Communications Technology
Vol.43,No.08,2010 No.224,Totally
通信卫星切换控制技术研究及仿真
郭 松, 刘 伟, 郭 伟
(电子科技大学 通信抗干扰技术国家重点实验室,四川 成都 610054)
37
38
当前仿真时间/s
39 40
图 3 星内星间切换时延比较 星内切换免去了一定比例的向卫星申请信道的消息,使 得切换信令开销有所减少。图 4 分别是在不同呼叫间隔时间 下优化的最近距离切换和最近距离切换代价图,修改前后分 别为 0.7%和 0.6%左右,相对于原来的切换代价,修改以后 的策略使得切换代价在比例上降低了 14%。 节省的信令开销来至于信关控制子系统向卫星申请信 道的信令交互过程。由于星际路由会产生的延时、掉包等情 况,单纯依赖信关控制子系统控制所有全球用户的切换方案 将会影响切换成功率,增大时延,而采用具有星上处理的星
得到的时延是不包括节点处理时间的。
1.7
1.6