上海民办金苹果学校物理第十一章 简单机械和功单元测试卷 (word版,含解析)
上海民办新华初级中学人教版初中八年级物理下册第十一章《功和机械能》检测(答案解析)

一、选择题1.如图所示,是甲、乙两物体做功与所需时间的关系图象,由图像可以知道,甲物体的功率P甲与乙物体的功率P乙大小关系是()A.P甲>P乙B.P甲<P乙C.P甲=P乙D.无法确定2.研究表明,人步行时重心升降的幅度约为脚跨一步距离的0.1倍,人正常步行时,步距(指步行一步的距离)变化不大,请你估算一下:一个中学生正常步行(速度约为4km/h)半小时克服重力做功的功率约为()A.10W B.20W C.70W D.140W3.下列数据符合实际情况的是()A.托起两个鸡蛋所用的力大约是10N B.成年人手掌的面积约为10cm2C.成年人散步时的功率约为10kW D.通常情况下,人体受到的大气压强约为105Pa4.2020年6月,我国自主研发的北斗卫星导航系统的最后一颗组网卫星“北斗三号”发射成功。
如图,卫星在大气层外运行,不受空气阻力,下列说法正确的是()A.卫星从远地点运行到近地点,势能减小,动能增大B.卫星从远地点运行到近地点,势能增大,动能减小C.卫星从近地点运行到远地点,势能增大,动能增大D.卫星从近地点运行到远地点,势能减小,动能减小5.一定质量的货物在吊车钢索的拉力作用下竖直向上运动(不考虑空气的阻力和钢索重力),货物运动的路程(s)-时间(t)图象如图所示,根据图象,下列判断正确的是()A .2s 时钢索的拉力大小小于8s 时钢索的拉力大小B .货物竖直向上运动时,货物的重力不做功C .0至6s 内钢索拉力做的功小于6s 至12s 内钢索拉力做的功D .0至6s 内钢索拉力的功率大于6s 至12s 内钢索拉力的功率6.某同学沿楼梯以快跑与慢走两种方式从一楼到四楼,下列有关说法正确的是( ) A .快跑比慢走克服重力做功多B .快跑比慢走能量转换得快C .慢走克服重力做功约为500JD .快跑的功率约为1500W7.如图所示,质量为m 的小球从某一高度O 静止释放,下落过程中经过P 、Q 两点,已知OP PQ t t ,OP =PQ 。
上海民办新竹园中学物理第十一章 简单机械和功单元测试卷(解析版)

上海民办新竹园中学物理第十一章简单机械和功单元测试卷(解析版)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。
请回答下列问题:(1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______;(2)小红在实验中测得一组数据如下表,于是他立即得出了杠杆的平衡条件:“F1×L1=F2×L2”,你认为是否合理,并说明理由:______;F1/N L1/cm F2/N L2/cm2634(3)某次实验如图所示,杠杆平衡,则以下生活中相关杠杆的应用与此图中杠杆类型相同的是______(选填“托盘天平”、“核桃夹”或“筷子”);(4)在上图中,保持弹簧测力计的位置及拉力的方向和钩码的个数不变,钩码向左移动,若要保持杠杆平衡,则钩码到支点的距离不应超过______cm。
【答案】便于直接测量力臂不合理,只有一组实验数据,得到的结论具有偶然性核桃夹 10cm【解析】【分析】【详解】(1)[1]在探究杠杆的平衡条件时,为了便于直接测量力臂,我们将杠杆调至水平位置平衡。
(2)[2]在探究杠杆的平衡条件时,我们需要进行多次实验得到多组实验数据是结论具有普遍性,实验中由一组实验数据得到的结论具有偶然性。
(3)[3]如图所示,弹簧测力计对杠杆施加拉力的力臂大于钩码对杠杆施加拉力的力臂,是一个省力杠杆;而托盘天平是一个等臂杠杆,核桃夹是一个省力杠杆,筷子夹菜时相当于一个费力杠杆;所以与此图中杠杆类型相同的是核桃夹。
(4)[4]杠杆上相邻刻度线间的距离都等于2cm,每个钩码重均为0.5N,则图中钩码的总重力为0.5N63NG=⨯=弹簧测力计施加拉力的力臂L=⨯=2cm36cm右钩码向左移动,若要保持杠杆平衡,弹簧测力计量程为5N,由杠杆平衡条件可知,钩码对杠杆施加拉力的最大力臂5N 6cm 10cm 3NFL L G ⨯===右左 即钩码到支点的距离不应超过10cm 。
上海西郊学校物理第十一章 简单机械和功单元测试卷(含答案解析)

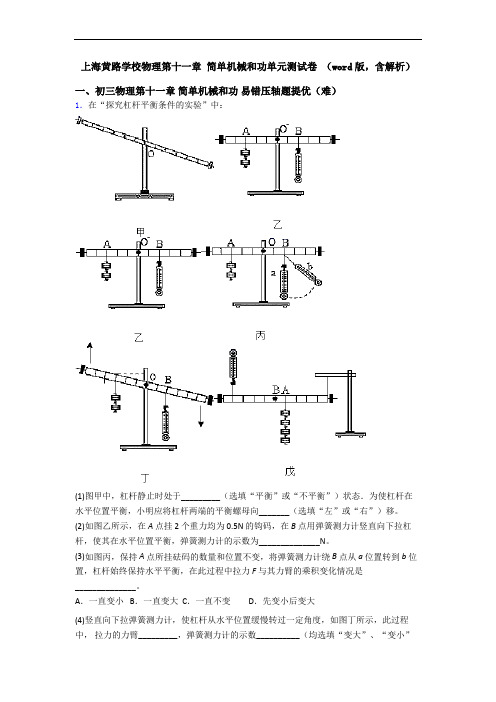
上海西郊学校物理第十一章简单机械和功单元测试卷(含答案解析)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.在“探究杠杆平衡条件的实验”中:(1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。
(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。
(3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是______________。
A.一直变小 B.一直变大 C.一直不变 D.先变小后变大(4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”或“不变”)。
(5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。
(6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。
(7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。
若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填“>”“=”或“<”)F,杠杆此时的机械效率η´___________η(选择“>”、“=”或“<”)。
上海黄路学校物理第十一章 简单机械和功单元测试卷 (word版,含解析)
上海黄路学校物理第十一章简单机械和功单元测试卷(word版,含解析)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.在“探究杠杆平衡条件的实验”中:(1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。
(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。
(3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是______________。
A.一直变小 B.一直变大 C.一直不变 D.先变小后变大(4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”或“不变”)。
(5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。
(6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。
(7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。
若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填“>”“=”或“<”)F,杠杆此时的机械效率η´___________η(选择“>”、“=”或“<”)。
上海民办新世纪中学人教版初中八年级物理下册第十一章《功和机械能》检测(含答案解析)

一、选择题1.研究表明,人步行时重心升降的幅度约为脚跨一步距离的0.1倍,人正常步行时,步距(指步行一步的距离)变化不大,请你估算一下:一个中学生正常步行(速度约为4km/h)半小时克服重力做功的功率约为()A.10W B.20W C.70W D.140W2.如图所示,小明在雷锋体育场观看陀螺表演时发现:当鞭子抽打陀螺时它的转速会变快,不抽打时会慢慢停下来,关于这一场景下列说法正确的是()A.抽打陀螺时转速会变快是因为它的惯性增大B.不抽打时会慢慢停下来是因为摩擦力的作用C.陀螺在水平地面转动时,重力对它做功D.陀螺转动时,对地面压力和受到的支持力平衡3.嫦娥五号是中国探月工程三期发射的月球探测器,也是中国首个实施无人月面取样返回的探测器。
2020年12月17日凌晨,嫦娥五号返回器成功携带月球样品着陆地球。
为避免着陆速度过大,嫦娥五号返回器采用了半弹道跳跃式再入返回技术方案(如图)就是用类似“打水漂”的方式两度进人大气层最终降落在内蒙古四子王旗地区。
返回器从首度进人大气层到最终落地的过程中,下列说法正确的是()A.嫦娥五号返回器的动能越来越大B.嫦娥五号返回器的势能先减小后增大再减小C.嫦娥五号返回器的势能不断减小D.嫦娥五号返回器的机械能始终不变4.雨滴从高空由静止开始下落,由于空气阻力的影响,最终会以恒定的速度匀速下降。
雨滴在空中下落的整个过程中(不计雨滴质量变化)()A.动能一直增大,机械能一直减小B.重力势能一直减小,机械能不变C.动能先增大后不变,机械能不变D.动能先增大后不变,机械能一直减小5.快递小哥宋学文作为一名普通劳动者当选2020年全国劳模,有关宋学文在工作中对货物做功情况叙述正确的是()A.把货物从地上搬上运输车,他对货物没有做功B.货物太重未搬动,他对货物做了功C.抱着货物上楼时,他对货物做了功D.抱着货物在原地等待签收时,他对货物做了功6.2020年11月24日04时30分,中国在文昌航天发射场,用长征五号遥五运载火箭成功发射嫦娥五号探测器,在“嫦娥五号”加速上升的过程中,它的()A.动能增大,重力势能增大B.动能增大,重力势能减小C.动能减小,重力势能增大D.动能增大,机械能不变7.如图所示,质量为m的小球从静止下落,落在竖直放置静止的轻弹簧上的A点,到达B点时小球重力与弹簧的弹力大小相等,图中C点是小球到达的最低点(不计空气阻力),下列说法正确的是()A.从A到C,小球的机械能保持不变B.从A到C,小球重力势能减小、动能先增大后减小C.到C点时,小球的动能为零,小球受到的重力大于弹簧的弹力D.从A到C,小球重力势能减小、动能增大、小球与弹簧机械能总量不守恒8.如图所示,完全相同的甲、乙两个小球,甲球由轻绳系住,乙球由橡皮条系住,都从水平位置由静止开始释放,当两球到达悬点正下方K点时,橡皮条长度恰好与绳子长相等,则在K点时,下列说法错误的是()[不计空气阻力]A.v甲>v乙B.从静止运动到K点,甲的重力做功多C.甲的动能大于乙的动能D.甲和乙的重力势能相等9.甲、乙两台起重机,分别以速度v甲=0.2m/s和v乙=0.1m/s匀速提升等重的物体,并使物体都升高8m它们所做的功分别为W甲和W乙,功率分别为P甲和P乙,则()A.W甲>W乙,P甲>P乙B.W甲<W乙,P甲<P乙C.W甲=W乙,P甲>P乙D.W甲=W乙,P甲=P乙10.小刚在班级打扫卫生时,想将讲桌移动一下位置,他用了30N的力去推讲桌,结果没有推动。
上海同济初级中学物理第十一章 简单机械和功单元综合测试(Word版 含答案)

上海同济初级中学物理第十一章简单机械和功单元综合测试(Word版含答案)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。
请回答下列问题:(1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______;(2)小红在实验中测得一组数据如下表,于是他立即得出了杠杆的平衡条件:“F1×L1=F2×L2”,你认为是否合理,并说明理由:______;F1/N L1/cm F2/N L2/cm2634(3)某次实验如图所示,杠杆平衡,则以下生活中相关杠杆的应用与此图中杠杆类型相同的是______(选填“托盘天平”、“核桃夹”或“筷子”);(4)在上图中,保持弹簧测力计的位置及拉力的方向和钩码的个数不变,钩码向左移动,若要保持杠杆平衡,则钩码到支点的距离不应超过______cm。
【答案】便于直接测量力臂不合理,只有一组实验数据,得到的结论具有偶然性核桃夹 10cm【解析】【分析】【详解】(1)[1]在探究杠杆的平衡条件时,为了便于直接测量力臂,我们将杠杆调至水平位置平衡。
(2)[2]在探究杠杆的平衡条件时,我们需要进行多次实验得到多组实验数据是结论具有普遍性,实验中由一组实验数据得到的结论具有偶然性。
(3)[3]如图所示,弹簧测力计对杠杆施加拉力的力臂大于钩码对杠杆施加拉力的力臂,是一个省力杠杆;而托盘天平是一个等臂杠杆,核桃夹是一个省力杠杆,筷子夹菜时相当于一个费力杠杆;所以与此图中杠杆类型相同的是核桃夹。
(4)[4]杠杆上相邻刻度线间的距离都等于2cm,每个钩码重均为0.5N,则图中钩码的总重力为G=⨯=0.5N63N弹簧测力计施加拉力的力臂2cm36cmL=⨯=右钩码向左移动,若要保持杠杆平衡,弹簧测力计量程为5N,由杠杆平衡条件可知,钩码对杠杆施加拉力的最大力臂5N 6cm10cm 3NFL L G ⨯===右左 即钩码到支点的距离不应超过10cm 。
物理九年级上册 第十一章 简单机械和功达标检测(Word版 含解析)

物理九年级上册第十一章简单机械和功达标检测(Word版含解析)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支架,弹簧测力计,刻度尺,细线和相同的重0.5 N重的钩码若干个。
(1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”或”右”)调节,直到杠杆在水平位置平衡;(2)在图B中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______(选填“左”或”右”)倾斜;(3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他做了如图C的实验,已知杠杆上每个小格长度为5 cm,每个钩码重0.5 N,当弹簧测力计斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×动力臂______(选填“等于”或“不等于”)阻力×阻力臂。
实验C______(选填“能”或”不能”)说明甲同学结论是错误的。
【答案】右右等于能【解析】【分析】【详解】(1)[1]图A中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。
(2)[2]在图B中,据杠杆的平衡条件得3G⋅2F=2G⋅3L在左右两边同时增加一个相同的钩码,则左右两边分别变成4G⋅2F,3G⋅3L而4G⋅2F<3G⋅3L所以杠杆向右倾斜。
(3)[3][4]由图C知,此时4×0.5N×3×0.5cm=3N×12×4×0.5cm即:动力×动力臂=阻力×阻力臂。
而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。
2.图甲是某型号的抽水马桶水箱进水控制装置的示意图,浮子是有上底无下底的圆柱形容器,中间有圆柱形的孔(图乙是浮子的放大示意图),壁的厚度忽略不计,浮子通过圆孔套在直杆上,并与调节螺母紧密相连,手动上下移动调节螺母,可以使浮子的位置随之上下移动,轻质细杆AB 可绕O 点旋转,A 端与直杆底端相连,B 端装有塞子当水箱的进水孔进水,水面接触到浮子下端后,浮子内的空⽓开始被封闭压缩,随着水位继续上升,浮子上升带动直杆向上运动,当水位上升到一定高度,AB 杆处于水平位置时,塞子压住进水孔,进水孔停止进水。
上海世界外国语中学物理第十一章 简单机械和功检测题(Word版 含答案)

上海世界外国语中学物理第十一章简单机械和功检测题(Word版含答案)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支架,弹簧测力计,刻度尺,细线和相同的重0.5 N重的钩码若干个。
(1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”或”右”)调节,直到杠杆在水平位置平衡;(2)在图B中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______(选填“左”或”右”)倾斜;(3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他做了如图C的实验,已知杠杆上每个小格长度为5 cm,每个钩码重0.5 N,当弹簧测力计斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×动力臂______(选填“等于”或“不等于”)阻力×阻力臂。
实验C______(选填“能”或”不能”)说明甲同学结论是错误的。
【答案】右右等于能【解析】【分析】【详解】(1)[1]图A中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。
(2)[2]在图B中,据杠杆的平衡条件得3G⋅2F=2G⋅3L在左右两边同时增加一个相同的钩码,则左右两边分别变成4G⋅2F,3G⋅3L而4G⋅2F<3G⋅3L所以杠杆向右倾斜。
(3)[3][4]由图C知,此时4×0.5N×3×0.5cm=3N×12×4×0.5cm即:动力×动力臂=阻力×阻力臂。
而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。
2.小华探究杠杆平衡条件时,使用的每个钩码的质量均为100g,杠杆上相邻刻线间的距离相等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海民办金苹果学校物理第十一章简单机械和功单元测试卷(word版,含解析)一、初三物理第十一章简单机械和功易错压轴题提优(难)1.在探究“杠杆的平衡条件”实验中:(1)将杠杆装在支架上,发现杠杆左端下沉,此时应将杠杆两侧的螺母同时向_____(2)如图甲所示,杠杆在水平位置平衡。
如果在杠杆两侧各去掉一个相同的钩码,则杠杆将______(3)如图乙所示,用弹簧测力计在C处竖直向上拉。
当弹簧测力计逐渐向右倾斜如图丙,杠杆仍然在水平位置平衡,则弹簧测力计的示数将______(4)请在图丙中画出拉力F′的力臂l。
________【答案】右逆时针变大不变【解析】【分析】【详解】(1)[1]杠杆左端下沉,右端上翘,平衡螺母向上翘的右端移动。
(2)[2]设一个钩码的重力为G,杠杆一个小格代表l,如果在图中杠杆两侧各去掉一个相同的钩码时,杠杆的左端为⨯22=4G l Gl杠杆的右端为⨯3=3G l Gl所以杠杆的左端力和力臂的乘积大于右端的乘积,所以杠杆左端下沉,杠杆将逆时针转动。
(3)[3]乙图中,弹簧测力计竖直向上拉杠杆时,拉力的力臂为OC,弹簧测力计向右倾斜拉杠杆时(如图丙),拉力的力臂小于OC,拉力的力臂变小,拉力变大,弹簧测力计的示数将变大。
[4]根据杠杆平衡的条件,动力乘以动力臂等于阻力乘以阻力臂,因为杠杆始终保持水平平衡,钩码的重力和钩码的位置没有发生变化,所以弹簧测力计的拉力与其力臂的乘积将不变。
(4)[5]从支点向力的作用线做垂线,得到力臂,如图所示:2.探究“杠杆的平衡条件”实验中,所用的实验器材有杠杆、支架、细线、质量相同的钩码若干。
(1)将杠杆装在支架上,发现杠杆左端下沉,此时应将杠杆两侧的平衡螺母同时向______调,至杠杆在水平位置平衡,这样做的目的是_____________;(2)某同学进行正确的实验操作后,能不能根据图甲的这一组数据得出探究结论?_________(填“能”或“不能”)。
理由是___________;(3)如图甲所示,杠杆水平位置平衡。
如果在杠杆两侧各加上一个相同的钩码,则杠杆_____(填“左”或“右”)端将下沉;(4)如图乙所示,用弹簧测力计在C处竖直向上拉。
当弹簧测力计逐渐向右倾斜时,若杠杆仍然保持在水平位置平衡,则弹簧测力计的示数将________(填“变大”、“变小”或“不变”)。
【答案】右消除杠杆自身的重力对实验结果的影响不能一次实验具有偶然性,不具备必然性右变大【解析】【分析】【详解】(1)[1][2]杠杆右端下沉,应将杠杆重心向左移,所以应将两端的平衡螺母(左端和右端均可)向左调节,直至重心移到支点处,使杠杆重力的力臂为零,这样就减小了杠杆的自重对实验的影响;当杠杆在水平位置平街时,力的方向与杠杆垂直,力臂等于支点到力的作用线的距离,力臂可以从杠杆标尺刻度上直接读出来。
(2)[3][4]用实验来探究物理规律时,要采用多次实验,用多组实验数据来总结实验结论,实验结论具有普遍性,如果只有一次实验数据,总结的实验结论具有偶然性,所以不能用一次实验总结实验结论。
(3)[5]设一个钩码的重力为G,杠杆一个小格代表L,如果在图甲中杠杆两侧各添加一个相同的钩码时,杠杆的左端⨯53=15G L GL杠杆的右端⨯44=16G L GL故右>左,则右端将下沉。
(4)[6]乙图中,弹簧测力计竖直向上拉杠杆时,拉力力臂为OC,弹簧测力计向右倾斜拉杠杆,拉力的力臂小于OC,拉力力臂变小,拉力变大,弹簧测力计示数变大。
3.在做“探究杠杆的平衡条件”的实验中:(1)如图甲所示,为使杠杆在______位置平衡,可以将左端的平衡螺母向______调;(2)调节平衡后,在杠杆两侧挂不同数量的钩码,移动钩码位置,使杠杆在水平位置再次平衡,并记录相关数据。
改变钩码的数量及位置多次实验,小明得出杠杆的平衡条件______。
如图乙所示,A、B两点分别增加一个钩码,则杠杆______(选填“左端下沉”、“右端下沉”或“仍保持平衡”);(3)如图丙所示,若不在B点挂钩码,改用弹簧测力计在B点向下拉杠杆,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐______(选填“增大”或“减小”),原因是弹簧测力计拉力的力臂在______(选填“增大”或“减小”)。
【答案】水平左动力×动力臂=阻力×阻力臂或F1L1=F2L2右端下沉增大减小【解析】【分析】【详解】(1)[1][2]如图甲所示,杠杆右端下沉,左端上翘,应该将左端的平衡螺母向左调,使杠杆重新在水平位置平衡。
(2)[3]如图乙所示,假设一个钩码重力为G,横杆上一小格为L,调节平衡后,在杠杆两侧挂不同数量的钩码,移动钩码位置,使杠杆在水平位置再次平衡,并记录相关数据。
得到左边= F2L2=3G×2L=6GL右边= F1L1=2G×3L=6GL左边等于右边,改变钩码的数量及位置多次实验,左边依然等于右边,小明据此得出杠杆的平衡条件:动力×动力臂=阻力×阻力臂或F 1L 1=F 2L 2[4]如图乙所示,A 、B 两点分别增加一个钩码,则428G L GL '=⨯=左边339G L GL '=⨯=右边各自增加一个钩码后,右边大于左边,所以杠杆右端下沉。
(3)[5][6]如图丙所示,A 点钩码数量不变,钩码对杠杆施加的拉力方向不变,现在将B 点的弹簧测力计由竖直方向逐渐向左转动,则弹簧测力计拉力的力臂减小,为使杠杆始终保持水平平衡,根据杠杆的平衡条件可知,则弹簧测力计拉力增大,即弹簧测力计的示数将逐渐增大。
4.小华利用如图所示的装置来探究“杠杆的平衡条件”。
(1)实验前杠杆静止在如甲图所示位置,则此时杠杆是否平衡?____(选填“是”、“否”),杠杆的重心是否在支点上?________(选填“是”、“否”),若使杠杆在水平位置平衡,左边的螺母应向______移动;(2)如乙图,杠杆调节平衡后,小华在B 点悬挂了3个钩码,若要使杠杆再次平衡,D 点应该挂_____个钩码。
如果此时两边再各增加一个钩码,则杠杆将向_______边倾斜;(3)如图丙所示,小华在A 、C 两点分别悬挂等重的载物盘,制作了一个天平,左盘放物体,右盘加减砝码,此天平是利用了哪一类杠杆制作而成的?________。
假如支点O 因某种原因向右偏移,则天平的测量值____真实值(选填“大于”“等于”或“小于”)。
【答案】是 否 右 4 左 等臂杠杆 大于【解析】【分析】【详解】(1)[1]杠杆静止在如甲图所示位置保持静止状态,受力平衡,则此时杠杆是平衡的。
[2]如图甲所示,此时杠杆左端下沉,说明杠杆的重心不在支点上,而是在支点的左端的某一点。
[3]如图甲所示,此时杠杆左端下沉,右端上翘,则应该将平衡螺母向右调使杠杆重新平衡。
(2)[4]如图乙所示,假设一个钩码重为G ,杠杆上一格为L ,在B 点悬挂了3个钩码,则杠杆左端为3412G L GL ⨯=根据杠杆平衡条件有1243GL G L=⨯即需要在D点挂4个钩码才能使杠杆重新平衡。
[5]如果此时两边再各增加一个钩码,杠杆左端为4416G L GL⨯=右端为5315G L GL⨯=左端大于右端,即杠杆向左边倾斜。
(3)[6]如图丙所示,在A、C两点分别悬挂等重的载物盘,即力的方向与杠杆垂直,则A、C两点到支点的距离即为力臂,由图可知两力臂相等,杠杆为等臂杠杆,所以此天平是利用了等臂杠杆制作而成。
[7]支点O因某种原因向右偏移,杠杆不再是等臂杠杆,变成了费力杠杆,则C点的力臂减小,根据杠杆的平衡条件可知,C点需要更大的力,即会导致天平的测量值大于真实值。
5.小彬和小萌同学在学完浮力和杠杆的知识后,初步设计了两种方案,去分别测量待测液体(食用油、酱油)的密度:小彬的方案小萌的方案实验过程:如图,用弹簧测力计测出铁块的重力为G,然后把铁块先后浸没在水、食用油中静止后读出测力计的示数分别为F1、F2;实验过程:如图A O B为轻质杠杆(质量不计),小桶悬挂于A处位置不变,支点O位置不变。
首先在小桶中倒人一定体积的水,调节石块的位置于B,处杠杆在水平方向平衡,然后将水全部倒出将小桶擦干后再将等体积的酱油倒入小桶中,调节石块的位置于B处,杠杆再次在水平方向平衡,若OB1、OB2的长度分别为L1、L2(B1、B2图中未画出)(1)若食用油的密度比水的密度小,则在小彬的方案中F1______F2(选填“大于”、“小于”或“等于”);(2)小萌通过对比数据发现L1小于L2,可初步推断出酱油的密度比水的密度________;(3)已知水的密度为ρ水,结合两种方案中现有的测量数据,能得出待测液体密度的是__________的方案(选填“小彬”或“小萌”),其密度表达式为ρ=________。
【答案】小于大小彬21()()G FG Fρ--水【解析】【分析】【详解】(1)[1]由阿基米德原理可知,排开液体体积相同时,液体密度大,产生的浮力大,故完全浸没时在水中的浮力大于在食用油中的浮力;测力计的示数为铁块重力与浮力之差,故在水中的示数F 1小于在食用油中的示数F 2。
(2)[2]由杠杆平衡条件可得()OA 1GG L G L +=石桶水 ()OA 2GG L G L +=石桶酱 又L 1小于L 2,故可得 ()()OA OA GG L G G L +>+桶桶水酱即 G G >水酱V g V g ρρ>水水酱酱又水的体积和酱油的体积相同,故ρρ>水酱(3)[3][4]由(2)可知小萌的方案可以比较出待测液体的密度与水的密度大小关系,却不能求得具体值,小彬的方案可以求得待测液体密度大小;在小彬的方案中,铁块浸没在水中受到浮力为1-F G F =浮由阿基米德原理可得1-==F G F V V g gρρ=浮铁排水水 铁块浸没在待测液体受到的浮力为 2-F G F '=浮由阿基米德原理可得2211--===--F G F G F G F V g G F g gρρρ'浮水排水6.小飞用图甲装置来探究杠杆的平衡条件,设弹簧测力计和钩码对杠杆的拉力分别为动力F 1和阻力F 2,l 1和l 2分别表示动力臂和阻力臂.他的实验思路是:改变F 2、l 1和l 2,测得杠杆平衡时所需的拉力F 1,来寻找F 1、F 2、l 1和l 2四个物理量之间的关系.已知实验前已调节杠杆在水平位置平衡,弹簧测力计的量程为0~5N ,杠杆上每一格长10cm .实验次数阻力F 2/N 阻力臂l 2/cm 动力臂l 1/cm 动力F 1/N 14 33 30 24 18 30 2.4 3 4 7.5 30 1.0(1)为便于测量力臂,弹簧测力计应沿_______方向拉杠杆,并使之在_____位置平衡; (2)小飞首先保持F 2和l 1不变而改变l 2,所获得的实验数据如表格所示.第1次实验中弹簧测力计示数的放大图如图乙所示,则F 1=______N ,此时杠杆的类型与______(选填“筷子”或“老虎钳”)相同;(3)为获得更多组数据,小飞继续进行(2)中实验,则为能顺利完成实验,在改变阻力臂l 2时,l 2应不超过______cm ;完成上述实验后,小飞接下来还应进行的实验有:①保持______不变而改变F 2;②保持F 2和l 2不变而改变l 1.【答案】竖直 水平 4.4 筷子 37.5 l 2和l 1【解析】【分析】【详解】第一空、第二空.因为力与力臂垂直,当沿竖直方向拉动弹簧测力计使杠杆位于水平位置平衡时,力臂与杠杆重合,可方便的测量力臂的大小;第三空.由图像可知,弹簧测力计的分度值为0.1N ,示数为4.4N ;第四空.由表格数据知第1次实验中阻力臂长于动力臂,因此是费力杠杆,与筷子相同; 第五空.由杠杆平衡条件1122Fl F l =可得:11225N?30cm =37.5cm 4NF l l F == 即l 2应不超过37.5cm ;第六空.探究杠杆的平衡条件时要探究F 1、F 2、l 1和l 2四个物理量之间的关系,因此还应探究①保持l 2和l 1不变而改变F 2;②保持F 2和l 2不变而改变l 1.7.在“测量滑轮组的机械效率”的实验中,某组同学用滑轮安装了如图甲、乙所示的滑轮组,实验测得的数据如下表所示。