TDE驱动器报警故障代码
力士乐报警代码及说明一揽

力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。
DKC?故障诊断?1?诊断信息?F?和诊断信息?E?的说明?1.1?错误诊断信息F?F205?凸轮轴故障F207?切换至未初始化运行模式?F208?UL?电机类型已变?F209?PL?装载参数默认值?F211?DISC-Error?no.1(1#错误)F212 F212 F212 DISC-Error no.2(2#错误) DISC-Error no.3(3#错误) DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器 1 故障:象限错误F230 超过编码器 1 最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器 2 故障:信号幅度错误F245 编码器 2 故障:象限错误F246 超过编码器 2 最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD 模块固件升级过程中出现错误F291 EMD 模块超时F292 EMD 模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双 MST 故障关机F402 双 MDT 故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双 SST 故障关机F434 紧停 E-STOP F629 超过正行程极限F630 超过负行程极限F634 紧停 E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器 1 故障:信号幅度错误F843 编码器 2 故障:信号幅度错误F845 编码器 2 故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v 直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2 报警诊断信息E E211 DISC-#1 报警E212 E212 E212 DISC-#2 报警 DISC-#3 报警 DISC-#4 报警 E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091 E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率 S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动261 连续电流限制预报警E263 速度指令值>极限 S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD 模块固件升级活动 EMD 模块超时 EMD 模块欠电压 Ecox 客户端数量不准确E289 等待 Ecox 服务器端扫描E291 E293 E296E386 电源模块无就绪信号E408 MDT 数据存储器 A 无效编址E409 AT 数据存储器 A 无效编址E410 客户端未被扫描或地址为0 E411 双 SST 故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停 E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2 诊断信息 B、C、D 和诊断信息 A 的说明2.1 指令诊断信息 B、C 和 DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段 3 转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT 的配置 IDN 不可配置C105 配置长度大于 MDT 最大长度C106 AT 的配置 IDN 不可配置C107 配置长度大于 AT 最大长度C108 时间片参数大于 Sercos 循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1 大于长度 MDT(S-0-0010)C112 TNcyc(S-0-0001)或 TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与 TScyc(S-0-0002)的关系错误C114 T4 大于 TScyc(S-0-0002)-T4min(S-0-0005) C115 T2 数值太小C118 MDT 配置顺序错误C200 通讯阶段 4 转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型 P-0-4014 不准确C210 要求反馈 2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈 1 数据读取错误C218 反馈 2 数据读取错误C220 反馈 1 初始化错误C221 反馈 2 初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈 1(P-0-0074)C238 编码器 2 功能错误(->S-0-0022)C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022)C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位 1 类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021)C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段 4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166 和 P-0-0167D906 位移范围超出2.2 状态诊断信息 AA000 通讯阶段 0A001 通讯阶段 1A002 A003 A009 通讯阶段 2 通讯阶段 3 SERCOS 接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器 1 的位置模式A103 使用编码器 2 的位置模式A104 位置模式,无滞后,编码器 1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器 2A108 驱动器控制的插补,无滞后,编码器 1A109 驱动器控制的初步,无滞后,编码器 2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器 1, 虚拟主驱动器A113 相位同步,编码器 2. 虚拟主驱动器A114 相位同步,编码器 1. 真实主驱动器A116 相位同步,无滞后,编码器 1, 虚拟主驱动器A117 相位同步,无滞后,编码器 2, 虚拟主驱动器A118 相位同步,无滞后,编码器 1, 真实主驱动器A128 凸轮轴,编码器 1, 虚拟主驱动器A129 凸轮轴,编码器 2, 虚拟主驱动器A130 凸轮轴,编码器 1, 真实主驱动器A132 凸轮轴,无滞后,编码器 1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器 2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器 1, 真实主驱动器A150 驱动器控制的定位,编码器1 A151 驱动器控制的定位,编码器 1,无滞后A152 驱动器控制的定位,编码器2 A153 驱动器控制的定位,编码器 2,无滞后A154 编码器 1,驱动器受控的位置模式A155 编码器 1,无滞后,驱动器受控的位置模式A156 编码器 2,驱动器受控的位置模式A157 编码器 2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码C0270 故障描述电机编码器数据读取错误电机的型号参数P-0-4014 有误。
伺服报警故障代码大全

伺服报警故障代码大全伺服系统是现代工业自动化生产中常见的一种控制系统,它通过对电机进行控制,实现对机械运动的精确控制。
然而,在使用伺服系统的过程中,我们有时会遇到各种报警故障代码,这些代码代表着不同的故障类型,需要我们及时排查和处理。
下面将为大家详细介绍一些常见的伺服报警故障代码,以便大家在实际工作中能够更好地应对这些问题。
1. E001,伺服系统过载报警。
当伺服系统负载过大时,会触发E001报警代码。
这时需要检查负载情况,可能需要重新调整负载参数或者更换合适的伺服系统。
2. E002,伺服系统过热报警。
当伺服系统工作时间过长或者环境温度过高时,会触发E002报警代码。
此时需要及时停机降温,或者加强散热措施,以确保伺服系统的正常工作。
3. E003,伺服系统电压过高或过低报警。
电压异常会导致伺服系统工作异常,触发E003报警代码。
这时需要检查电源电压情况,可能需要更换稳压器或者调整电源线路。
4. E004,伺服系统编码器故障报警。
编码器是伺服系统的重要传感器,一旦出现故障会触发E004报警代码。
此时需要检查编码器连接情况,可能需要更换或者维修编码器。
5. E005,伺服系统通信故障报警。
通信故障会导致伺服系统无法正常接收指令,触发E005报警代码。
这时需要检查通信线路和通信模块,可能需要重新连接或者更换通信设备。
6. E006,伺服系统电机故障报警。
电机是伺服系统的核心部件,一旦出现故障会触发E006报警代码。
此时需要检查电机连接情况和电机状态,可能需要更换或者维修电机。
7. E007,伺服系统位置偏差报警。
位置偏差会导致伺服系统无法精确定位,触发E007报警代码。
这时需要检查位置传感器和位置控制参数,可能需要重新校准或者调整位置控制系统。
以上是一些常见的伺服报警故障代码,我们在使用伺服系统时,要时刻关注系统的运行状态,及时处理各种报警故障,以确保系统的正常运行。
希望以上内容能够帮助大家更好地理解和应对伺服系统报警故障,提高工作效率和生产质量。
德诚驱动器故障代码大全
德诚驱动器故障代码大全摘要:1.引言2.德诚驱动器简介3.德诚驱动器故障代码分类4.常见故障代码及解决方法4.1 电源故障代码4.2 通讯故障代码4.3 机械故障代码4.4 控制故障代码5.故障排除流程与建议6.结语正文:德诚驱动器故障代码大全随着科技的不断发展,德诚驱动器在我国的工业生产领域得到了广泛应用。
然而,在使用过程中,驱动器难免会出现故障。
本文将为您详细解析德诚驱动器的故障代码,并提供相应的解决方法。
1.德诚驱动器简介德诚驱动器是一款高性能、高可靠性的驱动设备,广泛应用于各类自动化生产线。
它具有强大的驱动能力,可满足各种设备的运动控制需求。
2.德诚驱动器故障代码分类德诚驱动器故障代码主要分为四类:电源故障代码、通讯故障代码、机械故障代码和控制故障代码。
各类故障代码具有不同的表现形式和解决方法。
3.常见故障代码及解决方法3.1 电源故障代码电源故障代码主要包括过压、欠压、电源相序错误等。
针对此类故障,请检查电源线路是否正常,电源电压是否稳定,电源相序是否正确。
3.2 通讯故障代码通讯故障代码主要包括通讯中断、通讯超时等。
针对此类故障,请检查通讯线路是否正常,通讯设备是否正常工作,通讯参数是否设置正确。
3.3 机械故障代码机械故障代码主要包括电机过热、轴承损坏等。
针对此类故障,请检查电机是否过载,轴承是否需要更换,机械部件是否需要维修。
3.4 控制故障代码控制故障代码主要包括控制电路故障、驱动器内部故障等。
针对此类故障,请检查控制电路是否正常,驱动器内部是否需要维修或更换。
4.故障排除流程与建议当德诚驱动器出现故障时,请首先根据故障代码提示进行排查。
如无法解决问题,建议联系专业维修人员进行检测和维修。
5.结语本文详细介绍了德诚驱动器的故障代码及其解决方法,希望能对您在使用德诚驱动器过程中遇到的问题提供帮助。
台达驱动器报警代码

台达驱动器报警代码标题:台达驱动器报警代码导言台达驱动器是工业控制领域中常见的设备之一,广泛应用于各种机械设备中。
然而,在使用台达驱动器的过程中,有时会遇到报警代码的情况。
本文将介绍一些常见的台达驱动器报警代码及其可能的原因和解决方法,旨在帮助用户更好地理解和应对这些报警情况。
一、 驱动器急停错误 是台达驱动器中常见的一个报警代码,它表示驱动器出现急停错误。
可能的原因有:1. 急停信号异常:首先,检查是否存在与急停信号相关的故障,例如急停按钮损坏、线路松动等。
2. 马达过载:如果马达负载过重,将造成驱动器的过载报警。
可以检查马达负载情况、减少负载或调整驱动器参数等方式进行解决。
解决方法:1. 检查急停信号线路,确保其正常连接和工作。
2. 若马达过载,可以降低系统负载、优化系统参数、检查驱动器设置等方法进行处理。
二、E.OL 驱动器过载错误E.OL 是台达驱动器中常见的另一个报警代码,它表示驱动器出现过载错误。
出现这种报警代码的原因有:1. 马达过载:与 报警类似,过载错误也可能是由马达负载过重引起的,可以检查马达负载情况并适当调整负载等方式解决。
2. 负载不平衡:系统负载分布不均可能导致部分驱动器过载,可以检查系统负载分布情况并适当优化系统设计和调整驱动器参数。
解决方法:1. 检查马达负载情况,降低负载或调整参数。
2. 调整系统设计,使负载均匀分配。
三、E.FL 频率太低错误E.FL 报警代码表示台达驱动器频率设置过低。
这可能是由以下原因导致的:1. 频率设置错误:检查驱动器参数中的频率设置是否正确,以确保它与实际需求相匹配。
2. 负载过轻:当负载较轻时,驱动器频率设置过低可能导致 E.FL 报警。
可以增加负载或适当提高频率。
解决方法:1. 检查频率设置参数,确保与实际需求匹配。
2. 如负载过轻,可以增加负载或适当提高频率参数。
四、E.OP 过热保护错误E.OP 是台达驱动器的过热保护报警代码。
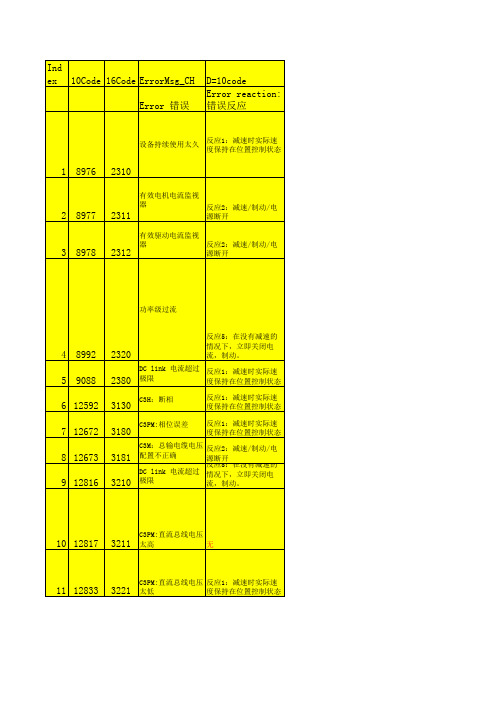
驱动器故障代码表
无
C3PM:直流总线电压 反应1:减速时实际速
11 12833 3221 太低
度保持在位置控制状态
DC link 电流低于 极限
12 12834 13 16912 14 17168 15 17424 16 17536 17 20753 18 20754 19 20757 20 20758 21 20759 22 21376 23 21536 24 21537 25 21541 26 21632 27 21633 28 21649 29 21650 30 21651 31 21664
目标或实际位置超 反应2:减速/制动/电
7323 过上限
源断开
目标或实际位置超 反应2:减速/制动/电
7324 出下限
源断开
7327 运动中变向
反应2:减速/制动/电 源断开
解码器输出电平过 反应2:减速/制动/电
7381 高
源断开
解码器输出电平过 反应2:减速/制动/电
7382 低
源断开
载荷与电机反馈位 反应2:减速/制动/电
Ind ex 10Code 16Code ErrorMsg_CH
Error 错误
D=10code Error reaction: 错误反应
设备持续使用太久
反应1:减速时实际速 度保持在位置控制状态
1 8976 2310
2 8977 3 8978
有效电机电流监视
器
2311
反应2:减速/制动/电 源断开
7385 置差别过大。
源断开
7391 反馈电平超限
反应2:减速/制动/电 源断开
7392 反馈电平过低
反应2:减速/制动/电 源断开
54 29588 55 29589 56 29600 57 29601 58 29605 59 29606 60 29607 61 29608 62 29609 63 29610 64 29611 65 29612 66 29616 67 29824 68 29825 69 29826 70 29827 71 29828 72 29829 73 29830 74 29831 75 29832
台达驱动器异警一览表

同上
AL123
CANopen PDO存取时,资料Size错误
讯息中资料长度与指定的物件不符
同上
AL124
CANopen PDO存取时,资料范围 错误
讯息中的资料超出指定物件的范围
同上
AL125
CANopen PDO物件是唯读,不可写入
讯息中指定物件不可写入
同上
AL126
RS-232/485通讯异常时动作
AL020
串列通讯逾时
RS-232/485通讯逾时时动作
AL021
保留
保留
AL022
主回路电源缺相
主回路电源缺仅单相输入
AL023
预先过负载警告
预先过负载警告
AL024
编码器初始磁场错误
编码器磁场位置UVW错误
AL025
编码器内部错误
编码器内部记忆体异常,内部计数器异常
NMT:Reset node或0x6040.Fault Reset
AL112
CANopen PDO接收溢位
PDO Rx Buffer 溢位(1毫秒之内接收到两笔以上相同COBID的PDO)
同上
AL121
CANopen PDO存取时,Index错误
讯息中指定的Index不存在
同上
AL122
CANopen PDO存取时,Sub-Index错误
NMT:Reset node或0x6040.Fault Reset
AL245
Pr定位超时
定位命令执行超过时间限制
同上
AL249
Pr路径编号太大
Pr路径编号为0~63,否则超过限制
同上
AL261
DME引擎故障灯闪码分析

DME引擎故障灯闪码分析:1-1-2-2-2 ~ 1-2-2-1-11-1-2-1-2 ~ 1-2-2-1-21-1-2-6-4 ~ 1-2-2-6-41-1-2-1-5 ~ 1-2-2-1-51-1-2-1-6 ~ 1-2-2-1-61-1-2-2-2 ~ 1-2-2-2-21-1-2-2-3 ~ 1-2-2-2-31-1-2-2-4 ~ 1-2-2-2-41-1-2-3-1 ~ 1-2-2-3-11-1-2-3-2 ~ 1-2-2-3-21-1-2-3-3 ~ 1-2-2-3-31-1-2-4-1 ~ 2-4-61-2-2-4-1 ~ 2-4-81-1-3-5-1 ~ 2-5-61-2-2-5-1 ~ 2-5-81-1-2-6-1 ~ 1-2-2-6-11-1-2-6-2 ~ 1-2-2-3-21-1-2-6-3 ~ 1-2-2-6-31-1-1-1-1 ~ 1-2-1-1-1DME 引擎故障码读取与清除:基本上BMW车系引擎故障码 1988年作为区分:■1988年以前系统若有故障时,只要将点火开关KEY-ON后"CHECK"灯会熄灭,然后约5秒后会自动闪烁故障码.(当引擎电脑没有记忆故障码时,点火在KEY-ON未发动引擎时,"CHECK"灯会保持亮着).■1988欧规车系,仪表板没有"CHECK"灯,引擎故障码读取时应在DME电脑上.跨接一个LED灯.DME-55pin 引擎电脑LED灯电阻为330欧姆,#15脚=故障码输出 ,#18脚=电源DME-88pin引擎电脑LED灯电阻为330欧姆,#8脚=故障码输出,#26脚=电源读取故障码步骤及(1988年-1995年)故障码表将点火开关KEY-ON时,在5秒内将节气门全开5次,即可由仪表板"CHECK"灯或由跨动叫速运转一分钟后即可.依据前节利用仪表板 CHECK 灯或跨接LED 灯所读取之引擎故障码已含尽了:含氧传感器、空气流量计、引擎水温传感器、进气温度传感器、节气门传感器、高压线圈、喷油咀、泵浦继电器、怠速马达、碳罐电磁阀及充电系统,本节将分析DME电脑中M1.7M3.1、 M3.3.1、 MS40电脑诊断程序。
tdemacno伺服驱动器说明书
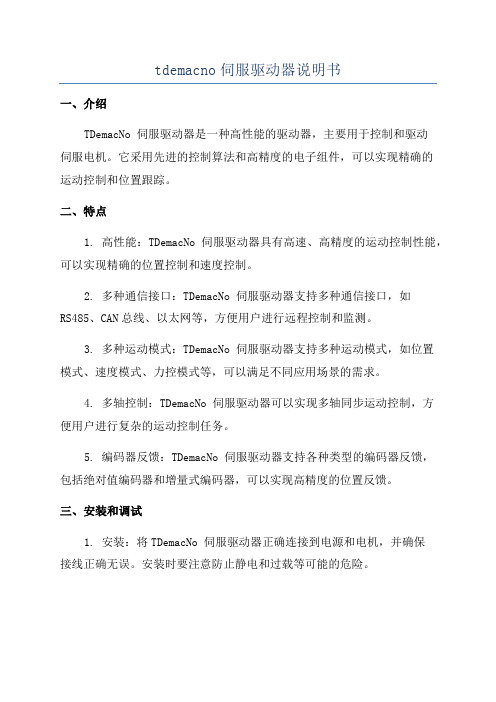
tdemacno伺服驱动器说明书一、介绍TDemacNo 伺服驱动器是一种高性能的驱动器,主要用于控制和驱动伺服电机。
它采用先进的控制算法和高精度的电子组件,可以实现精确的运动控制和位置跟踪。
二、特点1. 高性能:TDemacNo 伺服驱动器具有高速、高精度的运动控制性能,可以实现精确的位置控制和速度控制。
2. 多种通信接口:TDemacNo 伺服驱动器支持多种通信接口,如RS485、CAN总线、以太网等,方便用户进行远程控制和监测。
3. 多种运动模式:TDemacNo 伺服驱动器支持多种运动模式,如位置模式、速度模式、力控模式等,可以满足不同应用场景的需求。
4. 多轴控制:TDemacNo 伺服驱动器可以实现多轴同步运动控制,方便用户进行复杂的运动控制任务。
5. 编码器反馈:TDemacNo 伺服驱动器支持各种类型的编码器反馈,包括绝对值编码器和增量式编码器,可以实现高精度的位置反馈。
三、安装和调试1. 安装:将TDemacNo 伺服驱动器正确连接到电源和电机,并确保接线正确无误。
安装时要注意防止静电和过载等可能的危险。
2. 参数配置:根据实际需求,通过参数配置软件对TDemacNo 伺服驱动器进行参数设置。
参数包括运动模式、速度控制参数、位置控制参数等。
3.调试:在进行调试前,先进行伺服驱动器的使能和复位操作,确保安全。
然后,通过控制软件对伺服驱动器进行速度控制和位置控制等功能测试。
四、注意事项1. 温度:在使用TDemacNo 伺服驱动器时,要注意控制其工作温度范围,避免过热或过低的情况发生。
2. 通信安全:使用TDemacNo 伺服驱动器时,要确保通信接口的安全性,避免非法访问和攻击。
3.轴承保养:定期检查和保养伺服电机的轴承,确保其正常工作和寿命。
4.电源稳定性:提供稳定的电源供应是保证伺服驱动器正常运行和性能的重要因素。
五、维护与保养1.清洁:定期清洁伺服驱动器和连接器,确保其正常工作和散热。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
读写EEPROM时出错
报警A1.1与 A1.2皆出现
EEPROM有问题
A2.0
绝对传感器通道与电机相序感应相反
编码器绝对值通道与电机没有相同的感应顺序。在参数P79中表现出绝对初始位置与结束位置的脉冲差异。
交换绝对值通道然后重新再做连接测试。
A2.1
绝对传感器通道有问题
编码器绝对值通道存在某些问题。
检查参数设置并与电机铭牌数据相比较。
过载
降低负载
电机运转不平稳
电机负载变化太大或显示超过负载点
降低负载点
增大电机规格或使用较大(频率)驱动器
故障报警表
报警
描述
正确措施
A1.0
加载了默认参数
EEPROM数据涉及不同的内核
此报警可以复位但应注意:此时所有参数皆为默认值。
A1.1
读EEPROM时出错
当从EEPROM读出数值时出现总和检查错误,则默认值自动加载。
检查电机侧的连接线,特别是连接端子处,以防止线路出现断路或短路。
通过测试绝缘体强度来检查电机绝缘,必要时更换。
A4.0
应用选件报警
此报警为应用选件相关。请参照专门的说明书
A5.0
电机热报警
连接参数C46选择应用不同的电机热传感器。
若C46=1或2,则采用PTC/NTC型且Ohm值(d41)达到了安全阀值(P95)。
检查参数P67设置是否正确,然后分析绝对值通道(内部监控值47和48)(d47,d48)
A2.2
霍尔传感器循环感应错误(P79=1)或丢失(P79=2)
在传感器测试时(C41)发现某些问题。
对于霍尔传感器,参数P79对于理解所发现的问题很有用处:
P79=1,传感器循环感应次序错误。A通道与C通道交换。
若C46=3,则一数字(开关量)输入配置到I23开关输入功能且此输入端未处于有效状态。
若C46=4,则应用KTY84型且读出(实际)温度(d26)一定高于最大温度设定(P91)
检查温度读数d26然后检查电机。用KTY84时,若-273.15出现则与电机热传感器的电气连接被中断。如果读数正常而电机仍过热,则要检查电机冷却回路是否正常。检查风扇,其供电电源,通风口和电柜进气口过滤网等,如果需要可以更换或清洗。确认电机周边环境温度在技术规格表所允许的范围之内。
P79=2,至少有一个霍尔传感器通道缺失。检查霍尔传感器通道。
A2.3
霍尔传感器与内部绝对位置不协调(误差>45度)
正常运行时发现内部绝对位置与霍尔传感器之间有冲突。检查霍尔传感器存在和每转增量通道脉冲数。
A3.0
电源故障
驱动器输出电流达到已触发报警的门槛,这可能由于驱动器输出的各相电线或电机破损导致短路而引发的过流所造成。也可能是调节错误。
A10.0
DC母线在允许的最小门槛值以下
中间驱动器回路电压(DC母线参见d24)下降到低于最小值(P106)
当主变压器动力不足以支撑负载或当同线上动力强大的电机同时启动时回出现低电压
试着采取相应的措施来稳定线电压。如果需要,启用总电源故障时母线支持功能(C34=1)。当然这只能对轻负载的电机有所帮助。
A5.1
散热器热报警
散热器温度(d25)高于最大值(P118)
检查温度读数d25然后检查散热器。若-273.15出现则与散热器热传感器的电气连接被中断。如果读数正常而散热器仍过热,则要检查驱动器冷却回路是否正常。检查风扇,其供电电源,通风口和电柜进气口过滤网等,如果需要可以更换或清洗。确认驱动器周边环境温度在技术规格表所允许的范围之内。
试着重新从EEPROM读出数值。
读出过程被以某种方式干扰,若问题总出现请做为存储器故障与TDE联系
A1.2
写EEPROM时出错
当数据被写入到EEPROM时所需数值时总是在随后出现:如果检查出两者区别,则触发报警。
试着重新将数值写入到EEPROM中。
写入过程被以某种方式干扰,若问题总出现请做为存储器故障与TDE联系
正向错误
反置正向速度转向设定C76=1
速度给定值反向
反置速度给定值
电机转动不可调节
无给定值信号
检查接线,如果没有信号则需给出给定值信号。
过载
减小电机负载
电机加速和制动不正常
加速/启动-减速/制动时间过短
检查参数必要时修改。
负载过高
降低负载
电机转数太高或太低
额定电机转速,最小或最大转速,漂移/零点偏置,或给定放大系数设置不正确
无报警故障
故障
可能的原因
正确措施
电机不运转
运行指令未给出
检查输入I00工作状态
端子L1,L2,L3接线不正确或动力电禁止(没有)
确保接线正确检查主电源和电机的连接。
检查驱动器接通时上下相关的所有接触器。
电机不运转
端子U,V,W接线不正确
触发报警
见下表
参数设置不正确
通过编程器检查参数值并修改错误。
电机方向反向
A10.1
主电源上紧急制动丢失
若连接参数C34=3选择紧急制动而主电源丢失时出现。
复位报警,重新使能,重复测试。
A8.0
现场使能逻辑输入丢失
一数字(开关量)输入配置成I02开关输入功能而此输入端未处于有效(激活)状态。
外部安全开关动作以禁止驱动器使能。
恢复并复位。
连接断开。检查并排除故障。
输入功能已经指定,但未给出使能。授权或未指配此功能。
A8.1
LogicLab监控报警
在慢循环时LogicLab监控报警出现
反馈选件卡与驱动器软件(固件)不兼容
检查用于软件(固件)版本和选件代码的内部值d62和d63。应该会有冲突或不一致。
A9.1
传感器缺失/未连接
传感器未连上
检查与传感器的连接
A9.2
超速(多于10个连续PWM周期)
超速:读出(实际)速度高于P52设定的阀值
在某一瞬间,读出(实际)速度超过允许的极限值。调整速度调节器放大系数或提高P52极限值
检查LogicLab慢任务间隔是否大于500ms 并试着减少执行时间。
A8.2
LogicLab快任务过长
LogicLab快任务时间过长
在允许的极限内试着减少执行时间。
请参照专门的说明书
A8.3
应用选项不工作
驱动器中没有有效的应用选项在运行
用OPDExplorer重新装载此应用选项。
A9.0
硬件线路板与固件(软件)不兼容
A6.0
电机I²t热报警
电机电子过载安全保护开关由于在一较长期间过流吸收而动作。
检查电机负载,减小负载可防止安全开关动作。检查热电流设定,必要时修改(P70)。
检查热常数值是否足够长(P71),检查安全热曲线是否与电机类型匹配,如果需要修改曲线(C33)。
A7.0
自动调整未完成
在测试时运行指令未使能ቤተ መጻሕፍቲ ባይዱ