无人直升机桨毂构造
直升机旋翼知识点总结
直升机旋翼知识点总结直升机是一种可以垂直起降的飞行器,其旋翼是实现垂直升降的关键部件。
在直升机的设计和运行过程中,旋翼的知识是非常重要的。
本文将从旋翼基本原理、旋翼结构、旋翼型式、旋翼控制等几个方面来进行详细的介绍。
一、旋翼基本原理1. 旋翼的作用旋翼是直升机的升力产生器,它产生的升力可以支撑直升机的重量,并使其垂直起降。
旋翼还可以控制直升机的飞行方向和高度。
2. 旋翼受力旋翼在飞行时受到四种力的作用:升力、拉力、风力和扭矩。
升力是垂直方向的力,支持直升机的重量;拉力是使直升机向前飞行的推动力;风力是来自旋翼运动所产生的气流作用力;扭矩是使直升机旋转的力。
3. 旋翼的旋转旋翼在飞行时以相对静止的直升机机身为中心旋转,旋转的目的是为了产生升力和推动力。
旋翼的旋转还可以产生反作用力,使直升机保持稳定飞行。
二、旋翼结构1. 旋翼叶片旋翼叶片是旋翼的主要部件,它由叶片根部、叶片翼型、叶片桨距、叶片弹性铰链等部分组成。
叶片是直升机产生升力和推动力的关键部件。
2. 旋翼桨毂旋翼桨毂是旋翼的连接部件,它将旋翼叶片连接到直升机的主转子轴上,使旋翼可以旋转并受到机身的控制。
3. 旋翼支撑系统旋翼支撑系统由旋翼桨毂、旋翼桨叶、旋翼振动减震器等部分组成,用于支撑和固定旋翼整体结构,保证旋翼的正常运行及稳定飞行。
三、旋翼类型1. 直升机旋翼直升机旋翼通常采用主旋翼和尾旋翼的形式,主旋翼产生升力和推动力,尾旋翼用于平衡主旋翼产生的扭矩。
2. 双旋翼直升机双旋翼直升机采用上下两层旋翼结构,上旋翼产生升力和推动力,下旋翼用于平衡上旋翼产生的扭矩。
3. 旋翼无人机旋翼无人机采用小型旋翼结构,可以进行垂直起降和定点悬停,用于军事侦察、航拍摄影等领域。
四、旋翼控制1. 旋翼调整旋翼调整是通过改变旋翼叶片的角度、转速和位置来控制旋翼的升力和飞行方向,以实现直升机的飞行和悬停等动作。
2. 旋翼平衡旋翼平衡是通过旋翼振动减震器、旋翼铰链等部件来保持旋翼在飞行过程中的稳定性和平衡性。
无人机零部件及其功能介绍 ppt课件
显示端 接收天线
显示端:可以配置iPad、安卓机和苹果手机等,或者大疆精灵
4Pro V2.0版本自带的高亮显示屏
ppt课件
11
遥控器
显示器托架
电源键
天线 摇杆
遥控器是用来对无人机飞行动作进行控制的部件,主要包 括电源键、摇杆、天线和几个快捷键
ppt课件
12
无人机分类
飞行器分类 稳定性
固定翼 自稳定
续航时间
长
直升机
不稳定,完整驱 动
多旋翼
不稳定,欠驱 动
中
短
飞行效率 荷载 其他
高
大
起飞助跑,降 落滑行
中
中
可垂直起降, 机械结构复杂
低
小
可垂直起降, 机械结构简单
ppt课件
13
无人机分类
无人机 重量分 类(按 民航法 规)
微型:0kg-7 kg 轻型:7 kg-116 kg 小型:116 kg -5700 kg 重型(大型):5700kg以上
无人机零部件及其功能介绍
总体结构介绍 动力系统 机身系统 机载系统 图传系统 遥控器
无人机分类
多旋翼无人机历史
无人机应用
无人区使用注意 事项
ppt课件
禁飞区
3
总体结构介绍
飞控系统
螺旋桨
图传系统
电机 机架
起落架
电调
相机
云台
智能电池
ppt课件
遥控器
4
动力系统
螺旋桨:无人机产生推力的最主要部件,
四旋翼无人机一般搭配4个螺旋桨,其中两 个正方向,两个反方向
ppt课件
Hale Waihona Puke 5电机:多旋翼无人机的电机多采用无刷直流电动机,
直升机动力学基础(旋翼动力学基础-2011-11)
R 0
mX
2 i
d
r
Ω2
R 0
mX
2 i
d
r
0
可以看出,在同样的条件下
2i 要比同阶
2 i
小,但由于
EJ EJ ,所以同阶频率摆振频率比挥舞频率大。
因此,离心力对摆振固有频率影响减小。
南京航空航天大学直升机技术研究所
★基阶振型
刚体摆振 20
或
lcj
M cj Ω2 I cj
y(0) 0 y'(0) 0 y"(R) 0
南京航空航天大学直升机技术研究所
3)特点: 铰接式: (1y)0 (r0)阶振r 型—是—一刚条体直挥线舞 (2)振型随转速是变化的
铰接式旋翼模态弯矩
南京航空航天大学直升机技术研究所
无铰式:
其一阶振型对应铰接式零阶、二阶振型对应铰接式一阶, 区别在桨叶根部:铰接式根部铰支,而无铰式及无轴承式根 部固支,模态弯矩根部最大。
(1)在桨尖加质量,对离心力刚度产生较大影响, 而桨根影响小;
(2)对广义质量,在振型的波腹处加质量影响大, 而在节点处加质量则没有影响。
把这两者综合起来看:
(1)靠近桨尖的振型节点处加质量,频率有较大 提高;
(2)靠近桨根的振型波腹处加质量,频率有较大 降低。
南京航空航天大学直升机技术研究所
挥舞固有频率的改变与集中质量展向位置的关系
超过5%,所以,铰接式旋翼 0 1.0 ~ 1.04 ,
一般不会超过1.04。
南京航空航天大学直升机技术研究所
桨叶的挥舞固有频率可以认为是由两 部分组成的:
2 i
R 0
100kg载荷多旋翼 参数

100kg载荷多旋翼参数1 前言一套完整的共轴双旋翼无人直升机系统一般有7个系统组成,包括:直升机平台,飞控系统,动力系统,舵机系统,数据链系统,地面站系统,载荷系统。
本文主要是针对共轴双旋翼无人直升机平台的构造及设计进行了简要的阐述。
2 概述“共轴双旋翼无人直升机具有绕同一理论轴线一正一反旋转的上下两副旋翼,由于转向相反,两副旋翼产生的扭矩在航向不变的飞行状态下相互平衡,通过所谓的上下旋翼总距差动产生不平衡扭矩可实现航向操纵,共轴双旋翼在直升机的飞行中,既是升力面又是纵横向和航向的操纵面。
”图1 共轴双旋翼无人直升机3 共轴双旋翼无人直升机总体设计3.1 主要参数分析与选择共轴双旋翼无人直升机平台的主要参数是总体方案的设计变量,它对直升机的性能有着决定性的影响。
因此,在直升机平台总体设计的初始阶段就要严密地进行参数选择,直升机平台总体设计参数关系到平台的飞行性能,飞行品质,气动,结构等参数。
是属于顶层设计。
对平台关键性指标起着决定性作用,同时也需要结合底层细节设计的数据相互验证,反复迭代。
直升机平台的主要参数包括,直升机总重,桨盘载荷,功率载荷,旋翼实度,和桨尖速度等。
3.1.1桨盘载荷的选择及方法桨盘载荷的定义:旋翼的拉力与旋翼桨盘面积之比。
式中,p 表示桨盘载荷,G表示直升机重量,R表示旋翼半径。
p=G/(πR²)桨盘载荷应在保证直升机平台所要求的有效载荷及性能的前提下,使直升机平台的有效载荷在总重中所占比例最大。
在具体设计时,参考与所设计直升机相近的现有直升机平台的统计数据,根据设计的具体情况来确定,一般可以遵循以下的原则:1.直升机总重量越大,桨盘载荷也应选得越大,一方面,总重较大时,往往选取更大的能获得较高的有效载荷,另一方面,对于总重较大的直升机。
如果p选得不够大,旋翼直径就会过大,在总体布置,使用等方面将引起相应问题。
2.采用涡轮轴发动机时,桨盘载荷可以选得大一些。
这样也可以获得较大的有效载荷。
无人直升机振动与故障分析
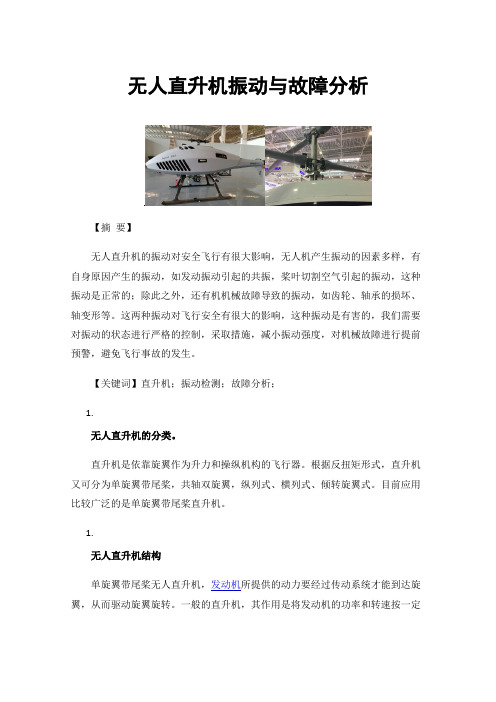
无人直升机振动与故障分析【摘要】无人直升机的振动对安全飞行有很大影响,无人机产生振动的因素多样,有自身原因产生的振动,如发动振动引起的共振,桨叶切割空气引起的振动,这种振动是正常的;除此之外,还有机机械故障导致的振动,如齿轮、轴承的损坏、轴变形等。
这两种振动对飞行安全有很大的影响,这种振动是有害的,我们需要对振动的状态进行严格的控制,采取措施,减小振动强度,对机械故障进行提前预警,避免飞行事故的发生。
【关键词】直升机;振动检测;故障分析;1.无人直升机的分类。
直升机是依靠旋翼作为升力和操纵机构的飞行器。
根据反扭矩形式,直升机又可分为单旋翼带尾桨,共轴双旋翼,纵列式、横列式、倾转旋翼式。
目前应用比较广泛的是单旋翼带尾桨直升机。
1.无人直升机结构单旋翼带尾桨无人直升机,发动机所提供的动力要经过传动系统才能到达旋翼,从而驱动旋翼旋转。
一般的直升机,其作用是将发动机的功率和转速按一定比例传递到旋翼、尾桨和各附件。
传动系统为单路承载方式,要求传动系统具有很高的可靠性和良好的维修性。
传动系统的结构2.1无人直升机传动系统的典型构成为:主减速器、尾减速器、动力传动轴和尾传动轴。
发动机多为涡轮轴发动机,其输入转速较高,瑞典Apid60输入转速最高为6600r/min,所以要达到旋翼的设计转速必须经过减速器。
减速器一般为3~4 级传动,Apid60的主减速器分3 级传动,第1级减速是同步轮减速、第2级为圆柱斜齿轮传动,第3级螺旋伞齿轮传动。
2.2直升机的发动机直升机的发动机主要是涡轮轴发动机,是涡轮发动机的一种,利用燃烧室产生的气流带动自由涡轮输出轴功率,转速很高。
一般和主减速机集成在地起。
2.3旋翼系统旋翼是直升机的关键部件,为直升机提供升力和操纵。
在直升机的发展中始终处于极为重要的地位。
旋翼系统包括2部分,斜盘、旋翼桨毂、桨叶等。
1 斜盘斜盘常用材质是AL7075-T6,高强合金铝。
位于桨毂下方,斜盘变化平面角度和高度,通过连杆和摆臂来实现飞机前进后退或向开向右飞行。
国外旋翼桨毂构型技术综述

收稿日期作者简介李满福(6),男,江西临川人,研究员,主要研究方向旋翼总体桨毂设计和旋翼相关专业的预先研究。
文章编号:1673-1220(2010)04-064-07国外旋翼桨毂构型技术综述李满福,程锦涛,王清龙(中国直升机设计研究所,江西景德镇333001)摘要旋翼桨毂构型技术是直升机的核心技术,对直升机的发展有重要牵引作用。
纵观直升机的发展历史,桨毂构型技术的发展始终处于直升机技术进步的前沿,是衡量直升机技术水平和直升机划代的重要标志之一。
回顾国外直升机旋翼桨毂构型的发展历程,在此基础上简要分析了国外桨毂构型的技术特点和发展态势,可为国内直升机的研制和发展提供诸多借鉴。
关键词桨毂;构型中图分类号:V275+.1文献标识码:A1国外桨毂构型发展历程直升机旋翼桨毂是一个不断变革的关键部件,其构型设计经历了一个由简单到复杂再到简单的发展过程。
早期的直升机由于没有铰链,无法解决直升机的稳定性和操纵性问题。
铰的发明使直升机旋翼变得可以操纵,直升机也因此真正发展成为一种实用的飞行器;但在以后的发展过程中,铰接式桨毂变得越来越复杂,桨毂中不仅有挥舞铰,摆振铰和变距铰,而且还有各式各样的轴承,减摆器,限动器等。
由于全铰接式桨毂结构复杂,零件数目多,不仅制造成本高,维护费用昂贵,维护工作量大,而且安全性比较差,因此简化桨毂,改善桨毂势在必行。
简化桨毂的第一步是用弹性轴承或钛合金挠性件取代挥舞铰和摆振铰。
20世纪60年代初,世界上开始研制旋翼系统所用的弹性轴承,开始只是在尾桨中应用,20世纪70年代初用于旋翼系统。
简化和改善桨毂的第二步就是用复合材料取代钛合金挠性件,星形柔性桨毂是成功的案例,AS350/松鼠0和S A365/海豚0直升机都装有星形柔性桨毂,同/云雀0的铰接式桨毂比较,星形柔性桨毂结构简单,零件数目大为减少。
简化和改善桨毂的第三步就是取消变距轴承,设计出真正的无铰/无轴承旋翼桨毂。
取消了轴承之后,每片桨叶都有一个复合材料挠性件,它可以适应桨叶的各种运动。
任务2.3 认知无人直升机飞行原理

无人直升机飞行原理
二、旋翼桨叶运动的基本原理
1.旋翼的挥舞和摆振运动
旋翼桨叶的桨距,对应桨叶弦线与桨毂旋转面间的夹角,和拉力的产生有
直接关系。因 而它的桨距也要求可调,从而调节和控制升力,这需要第 3 个饺链使桨叶可以围绕自身的轴运动,这个铰称为桨距铰,或轴向铰。
无人直升机飞行原理
三、单旋翼无人机的操纵方式 1.垂直飞行
无人直升机飞行原理
二、旋翼桨叶运动的基本原理 1.旋翼的挥舞和摆振运动
同样,在使用了挥舞铰后,由于桨叶的上下摆动,使每个桨叶旋转轴的角 速度发生变化。 由于科里奥利效应,桨叶下挥时,使旋翼角速度变小,上 挥时,角速度增大。这个力称为哥氏力,是沿旋翼周向作用在桨叶上的,也 是周期变化的,同样产生交变的根部弯曲力矩,为了减少这个力的作用,通 常再加上一个垂直放置的铰链,使桨叶可在圆周方向做少量的前后摆动,这 个铰链叫做垂直铰或摆振铰。挥舞铰和摆振铰是旋翼升力均匀的平稳飞行的 关键。
无人直升机飞行原理
1.垂直飞行 通过总距伺服机构同时改变各片桨叶安装角的大小,改变旋翼升力 的大小,从而实现无人直升机的悬停、垂直上升和垂直下降,直升 机垂直飞行时的受力如图所示。也就是说,变总距可以实现无人直 升机的垂直飞行。
无人直升机飞行原理
2.无人直升机的前飞、后飞及侧飞
直升机的前飞、侧飞、后飞运动,是通过调整旋翼桨盘向所需飞行方向倾斜, 从而产生所需方向的水平分力,实现该方向的水平飞行。也就是说,周期变 距可以实现无人直升机的滚转、俯仰、进退和侧移。
调整旋翼桨盘实现前飞、后飞和侧飞
无人直升机飞行原理
3.无人直升机转向
无人直升机主要通过转向伺服机构改变尾桨的安装角(桨距)的大小,改变 尾桨拉力的大小,实现转向。由上可知,旋翼是旋翼无人机最主要的操纵面, 纵向、横向和垂直方向的操纵力都由旋翼提供。同时旋翼又是旋翼无人机的 主要升力面,产生使旋翼无人机飞行最主要的空气动力。因此旋翼系统在旋 翼无人机上处于重要地位。
无人机结构与系统课件:无人机结构与飞行原理

1.2.3飞行控制
图1-12 俯仰运动
3.滚转运动、侧向运动(左右运动)
与图1-12的原理相同,在图1-13中,改变电机2和电机4的转 速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正 向和反向),实现四旋翼无人机的滚转运动。同时,四旋翼无 人机首先发生一定程度的倾斜,从而使螺旋桨升力产生水平分 量,因此可以实现四旋翼无人机的侧向飞运动。例如,电机4的 转速上升,电机2的转速下降,电机1和电机3的转速保持不变, 无人机左滚,向左运动。
表1-1 电机与螺旋桨的搭配
1.2.1 结构组成
6. 飞行控制系统
飞行控制系统是多旋翼无人机的核心设备,飞控系统的好坏从本质上决定了无人机 的飞行性能。飞行控制系统集成了高精度的感应器元件,主要由陀螺仪(飞行姿态感 知)、加速计、角速度计、气压计、GPS及指南针模块(可选配)以及控制电路等部件 组成。通过高效的控制算法,能够精准地感应并计算出无人机的飞行姿态等数据,再通 过主控制单元实现精准定位悬停和自主平稳飞行。根据机型的不一样,可以有不同类型 的飞行控制系统,有支持固定翼、多旋翼及直升机的飞行控制系统。
(2)KV值
图1-6 电机
在无刷电机的铭牌上还有一组数字,如 KV950,如图 1-6 所示。用它来表示当电机的输入电压增加 1 伏特,无刷电机空转转 速增加的转速值,单位是“转速/伏特”(RPM/V)。例如KV950 电机,外加 1V 电压,电机空转时每分钟转 950 转;外加 2V 电压,电机的空转转速就 1900 转/分;电压为 10V 的时候,电机的空转转速达到 9500 转/分。单从 KV 值,不可以评价 电机的好坏,因为不同 KV 值适用不同尺寸的螺旋桨。KV 值小的电机的绕线匝数更多更密,能承受更大的电流,所以可以产 生更大的扭矩去驱动更大尺寸的螺旋浆;相反,KV 值大的电机的绕线匝数少,产生的扭矩小,适合驱动小尺寸的螺旋浆。