三相异步电动机软启动器的设计
软启动方式
软起动的起动方式软起动器的功能主要是实现软起动和软停车,而软停车相当于是软起动的逆过程。
三相异步电动机软起动器拥有多种起动模式,可以满足不同的起动要求。
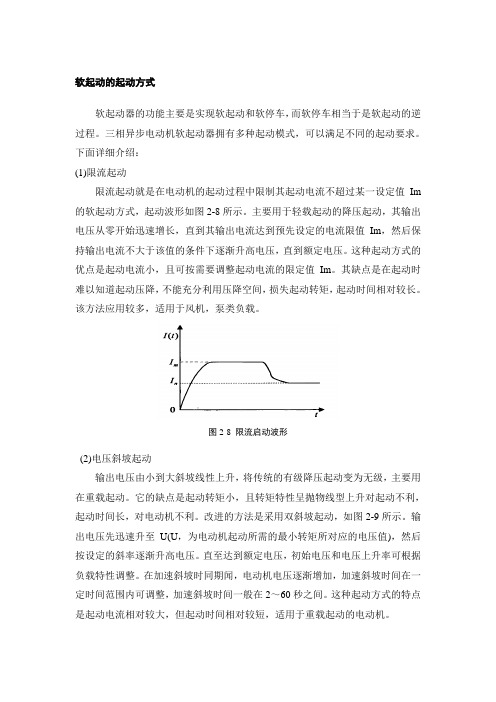
下面详细介绍:(1)限流起动限流起动就是在电动机的起动过程中限制其起动电流不超过某一设定值Im 的软起动方式,起动波形如图2-8所示。
主要用于轻载起动的降压起动,其输出电压从零开始迅速增长,直到其输出电流达到预先设定的电流限值Im,然后保持输出电流不大于该值的条件下逐渐升高电压,直到额定电压。
这种起动方式的优点是起动电流小,且可按需要调整起动电流的限定值Im。
其缺点是在起动时难以知道起动压降,不能充分利用压降空间,损失起动转矩,起动时间相对较长。
该方法应用较多,适用于风机,泵类负载。
图2-8 限流启动波形(2)电压斜坡起动输出电压由小到大斜坡线性上升,将传统的有级降压起动变为无级,主要用在重载起动。
它的缺点是起动转矩小,且转矩特性呈抛物线型上升对起动不利,起动时间长,对电动机不利。
改进的方法是采用双斜坡起动,如图2-9所示。
输出电压先迅速升至U(U,为电动机起动所需的最小转矩所对应的电压值),然后按设定的斜率逐渐升高电压。
直至达到额定电压,初始电压和电压上升率可根据负载特性调整。
在加速斜坡时同期闻,电动机电压逐渐增加,加速斜坡时间在一定时间范围内可调整,加速斜坡时间一般在2~60秒之间。
这种起动方式的特点是起动电流相对较大,但起动时间相对较短,适用于重载起动的电动机。
图2-9 电压斜坡启动波形(3)转矩控制起动主要用于重载起动,如图2-10所示。
它是按照电动机的起动转矩线性上升的规律控制输出电压。
其优点是起动平滑、柔性好、对拖动系统有利,同时减少对电网的冲击,使最优的重载起动方式。
其缺点就是起动时间较长。
图2-10 转矩控制启动波形(4)转矩加突跳控制起动转矩加突跳控制起动与转矩控制起动一样,也是用在重载起动的场合。
所不同的是在起动的瞬间用突跳转矩,克服拖动系统的静转矩,然后转矩平滑上升,可缩短起动时间。
ABBPST软启动器结构与使用

ABBPST软启动器结构与使用ABBPST软启动器是一种电机控制设备,用于控制和保护三相异步电动机。
该软启动器由电源接线模件、电缆连接模件、主开关模件、电流检测模件、控制模件和通信模件等组成。
本文将详细介绍ABBPST软启动器的结构和使用。
软启动器的结构1.电源接线模件:用于连接电源,为软启动器提供电力供应。
该模件通常具有过载和短路保护功能,可以保护整个软启动器的电源系统。
2.电缆连接模件:用于连接软启动器和电动机,通过电缆将电力传输到电动机。
3.主开关模件:用于控制软启动器的运行和停止。
主开关模件通常具有紧急停机按钮,供操作人员在紧急情况下快速停止电动机。
4.电流检测模件:用于监测电动机的电流,以保护电动机免受过载和短路等故障的影响。
电流检测模件还可以提供电流信息,以便控制模件对电机的启动和停止进行准确的控制。
5.控制模件:用于对软启动器进行控制和保护。
控制模件通常具有多种控制方式,如手动和自动,并可以通过编程设置启动、停止和保护参数。
6.通信模件:用于与外部设备进行通信,例如上位机、远程控制台等。
通过通信模件,操作人员可以远程监控和控制软启动器,提高操作和维护的便利性。
使用ABBPST软启动器1.确定电源接线:将电源接线模件正确连接到电源,确保电源供应稳定和可靠。
2.连接电动机:使用电缆连接模件将软启动器与电动机连接起来。
确保电缆连接正确并固定可靠。
3.设置启动参数:通过控制模块设置软启动器启动的相关参数,如起始电流、电压斜升时间和起动方式等。
4.软启动器启动:通过主开关模块启动软启动器,软启动器将按照设置的参数对电动机进行启动控制。
在启动过程中,可以通过电流检测模块监测电动机的电流情况。
5.运行状态监测:在电动机运行过程中,可以通过通信模块连接到上位机或远程控制台,实时监测电动机的运行状态和参数。
如果发现异常情况,可以通过控制模块进行相应的控制和保护。
6.停止软启动器:通过主开关模块停止软启动器,软启动器将按照设置的参数对电动机进行停止控制。
软启动器的工作原理分析

(1)无冲击电流。软起动器在起动电机时,通过 逐渐增大晶闸管导通角,使电机起动电流从零线 性上升至设定值。
(2)恒流起动。软起动器可以引入电流闭环控制, 使电机在起动过程中保持恒流,确保电机平稳起 动。
(3)根据负载情况及电网继电保护特性选择,可 自由地无级调整至最佳的起动电流。
6、软起动器在起动时报故障,软起动器不工作,电机 没有反应。故障原因可能为: a-电机缺相(检查电机和外围电路) b-软起动器内主元件可控硅短路(检查电机以及电网电 压是否有异常。和厂家联系更换可控硅) c-滤波板击穿短路(更换滤波板即可) d-控制板问题更换控制板
◆ 软起动器过热保护: 温度升至80℃士5℃时保护动作,动作时间 <0.1 秒;当温度降至55℃时(最低),过热保护解除。 ◆ 输入缺相保护:滞后时间: <3秒
◆ 输出缺相保护:滞后时间: < 3秒 ◆ 三相不平衡保护:滞后时间: < 3秒,以各相电流偏差 大 于 50%士10%为基准 ◆ 起动过流保护:起动时持续大于电机额定工作电流5倍 时保护动作。
2、起动报缺相故障,软起动器故障灯亮,电机没反应。 出现故障的原因可能是: a-起动方式采用带电方式时,操作顺序有误(正确操作顺 序应为先送主电源,后送控制电源)。 b-电源缺相或者三相电末上,软起动器保护动作(检查电 源) c-软起动器的输出端未接负载(输出端接上负载后软起动 器才能正常工作) d-控制板有问题更换控制板
在工程中最常用的就是三相异步电机,由于 其电机启动特性,这些电动机直接连接供电系统 启动(硬启动),将会产生高达电机额定电流5 -7 倍的浪涌(冲击)电流,使得供电系统和串 联的开关设备过载。另一方面,直接启动,也会 产生较高的峰值转矩,这种冲击不但会对驱动电 动机产生冲击,而且也会使用机械装置受损;还 会影响接在同一电网上其他电气设备正常工作。 鼠笼型异步电动机电子软启动器的诞生解决了这 个问题。它既能改变电动机的起动特性保护拖动 系统,更能保证电动机可靠起动,又能降低起动 冲击 ,因此随着电力电子技术的快速发展,智能 型软起动器将会得到更广泛的应用。
软启动电路及原理
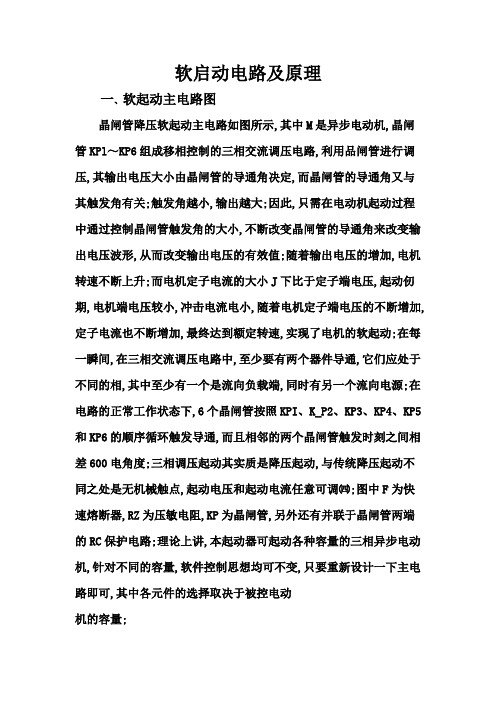
软启动电路及原理一、软起动主电路图晶闸管降压软起动主电路如图所示,其中M是异步电动机,晶闸管KPl~KP6组成移相控制的三相交流调压电路,利用品闸管进行调压,其输出电压大小由晶闸管的导通角决定,而晶闸管的导通角又与其触发角有关;触发角越小,输出越大;因此,只需在电动机起动过程中通过控制晶闸管触发角的大小,不断改变晶闸管的导通角来改变输出电压波形,从而改变输出电压的有效值;随着输出电压的增加,电机转速不断上升;而电机定子电流的大小J下比于定子端电压,起动仞期,电机端电压较小,冲击电流电小,随着电机定子端电压的不断增加,定子电流也不断增加,最终达到额定转速,实现了电机的软起动;在每一瞬间,在三相交流调压电路中,至少要有两个器件导通,它们应处于不同的相,其中至少有一个是流向负载端,同时有另一个流向电源;在电路的正常工作状态下,6个晶闸管按照KPI、K_P2、KP3、KP4、KP5和KP6的顺序循环触发导通,而且相邻的两个晶闸管触发时刻之间相差600电角度;三相调压起动其实质是降压起动,与传统降压起动不同之处是无机械触点,起动电压和起动电流任意可调㈣;图中F为快速熔断器,RZ为压敏电阻,KP为晶闸管,另外还有并联于晶闸管两端的RC保护电路;理论上讲,本起动器可起动各种容量的三相异步电动机,针对不同的容量,软件控制思想均可不变,只要重新设计一下主电路即可,其中各元件的选择取决于被控电动机的容量;主电路图二、软启动触发电路如图,出发电路主要有监测、移相控制、脉冲串产生电路、触发驱动电路等组成;同步信号取于电源输入端R 、S 、T,即u i 、w V i v 、信号,三相交流电源经电阻2423987R R R R R 、与、、25R 、分压后,分别送往电压比较器U7A 、U7B 、U7C 反相输入端;三个电压比较器的同相端经29R 接在作星形连接252423R R 、、R 的公共端上,相当于接至三相交流电的中相点;各相交流电正向过零点时,对应的比较器输出低电平,驱动光电耦合器内发光二极管发光,光耦内的光电三极管导通,将低电平有效的同步信号送往单片机的P1.0、P1.1、P1.2输入端;而当交流电反相过零时,对应的比较器输出高电平送往单片机;同步波形如图 所示;由于比较器为单电源供电,故在其同相端加上了由稳压管2VZ 提供的5.1V 直流电压,建立了正常的工作点;采用比较器获取同步信号的方法具有很高的过零检测灵敏度;移相控制信号由80196看出KC单片机;单片机根据软启动器设置的启动方式,计算出移相控制角α值,在对应的相电源电压过零时,延迟α角由高速输出口HSO0、HSO1、HSO2、HSO3、HSO4、HSO5送出宽度为5ms的方波作为与非门U8A、U8B、U8C、U8D、U9A、U9D的门控信号;。
三相异步电机软启动设计
电压全压启动时 , 启 动电流很大 , 约为额定 电流 的 5 ~7 倍, 会对 电网造成 冲击 , 影 响其 它设备 运行 。启 动转 矩约为 额 定转矩 的两倍 _ 】 ] 。加剧机 械结 构磨损 , 甚 至损 坏设备 。特 别是大功率 的三相异步 电机影 响尤其 明显 。为 了解决 电机 启动时产生 的大 电流 , 需要 对 电机进行 软启 动来 降低启 动
1 引言
三相异步 电动机 以其低成 本 、 高可 靠性 和易维 护等 特
点, 被 广 泛应 用 于 各 工 业 领 域 , 但 是 三 相 异 步 电 动 机 在 额 定
电压 电路 的触 发 脉 冲 角 , 因此 改 变 触 发 角 的变 化 规 律 , 可 以
改 变电动机 的启 动方式 , 使 电动机具有 不 同启动 特性 以适 应不 同的工 况要 求。
电机 。
2 软ห้องสมุดไป่ตู้动原理
软启动器实际上是个调压器 , 启动电机时 , 改变输出的电 压 。目前, 市场上常见 的软启动器主要是 电子式、 磁控式 和 自 动液体电阻式等类型, 其中电子式以晶闸管调压式居多l _ 2 ] 。
晶 闸管 式 软 启 动 器 主 回 路 由 三 对 反 并 联 晶 闸 管 组 成 ,
2 )限流启 动 : 电机在启动过程 中限制其启 动 电流不 超
过设定值的软启动 方式 。在 方式 1 ) 的基 础上 增加 电流 限
制环节 , 当电流要超过 限定值时 , 软启动器限制 电压使其 不 再爬 升 , 直至 电机转速上升 , 启 动电流下降时再继续提 升电 压 。这 种启 动方 式的优点是启 动电流小 , 且可 按需要调整 , 对 电网影响小 。缺点是在启动时难 以知道启动压 降。损 失 启 动力 矩 , 对 电机不利_ 4 ] 。 3 )转矩控制启动 : 用 在重 载启 动 , 它是将 电动机 的启 动转矩由小到大线性上 升 , 它 的优 点是 启动平 滑 , 柔性好 。 对拖动系统有更 好的保护 , 它 的 目的是保护拖 动系统 , 延 长 拖动系统的使 用 寿命 。同时 降低 电机 启动 时对 电网 的冲
三相异步电动机软启动器的设计
硬件 设计 是 系统 的基础 ,但 很大 一部 分硬 件功 能 由软 件来 实 现 ,因此软 件设 计是 系统 的一 个重 点 。电 机软启 动 系统 的主 程序 流程 图见 图 3 。
系统总线
图 2 P C结 构 框 图 L
开始
进 行 系统 的初始 自检 是很 重要 的 。系统初 始 自检包括 上 电前 自检 与上 电后 自检 ,前者是 检查 电动机是 否存 在 漏 电故 障 ,后 者是对 电机 的工作 电压 、电流 、温度 等 参量 进行 AD检 测并处 理 。 ( )系统 运行 部分 程序设 计 。运行 部分 程序 的设 3 计 内容按 系统 启 动的大 体流程 包括 :① 判断 是否要 求 启动( 检测 启 动开 关 是 否有效 ) ②判 断 启 动是 否 完 毕 ; ( 过 触 摸屏 提示 ) ⑧ 判 断 系统 稳定 启 动 运行 时是 否 通 ; 要求 停机 ( 检测 停 车开关 是否有 效 ) 。 本文 将模糊 控制技 术 和 P I C相结合 , 对一 些无 法 建立 精 确数 学模 型 的系统 能 够达 到 较好 的控 制效 果 。 首先将 电流偏差 与 电流偏 差变 化率 △ 模糊 化 处理 , 根 据 模 糊 语 言 变 量 赋值 表 和模 糊 控 制 规则 表 ,利 用 MATI B 预先 编制 程 序 进 行 模糊 推 理 与模 糊 判 断 , A 得到对 应 的量化 因子 K K 然 后采用 A/ 、 , D转化 模 块 将其按 一定 规律 存放在 P I C数据 寄存器 中。 制执行 控 时 ,P C只须对 采样 得 到的精 确量 、3 进行 等级 量 L e 化 ,得 到其 相应 的模糊 化 论域元 素 ,再通 过查 表获 得 输 出控 制量 的量 化值 ,最后 将此 量化 值乘 以 比例因子 即得到实 际输 出量 , 用输 出量 对 电动机 软启动 进行
三相异步电动机软启动的探讨

不 超过3 次 / ,即可 定为不频 繁启动 。小 于此数应按 频繁 O h
肩 动 考 虑 。 如 C 一 资 源 勘 探 钻 机 及 配 套 泥 浆 泵 , 和 桩 基 施 Y5 工 设备 z 一 一般 都属 于不 频 繁 启 动 。 z5
运行 ,机 械触头 断开 ,当电动机正 常运行 时晶闸管关 闭, 机械触头 闭合 。这 套动作过程 是通 过 内部控 制器 自动完 成
的,对 外部接线来讲是一个装置 ,所 以称为在线运行 。
它的优 点是具备 上述两种 类型 的所 有优 点同时闻避 了 它们 各 自的缺点 。优点是 :① 电路简单 ;② 自然风冷 ;③ 可控硅只 管启动和 停车 ,回避 可控硅 在线运行 所带来 的功 耗 与散热 ;④ 体积 小;⑤强大 智能控制 器得 以全 面发挥 , 能对 电动机起 到起 停与保护控 制 ;⑥节 省成套 空间 ;⑦ 由
触 器 , 回避 了 晶 闸管 在 线 运 行 的缺 陷 ( 图1 。 如 ) ( ) 内置 晶闸 管 旁 路 型 在 线 运 行 软 启 动器 。 内置 晶 闸 3
上 节省 热继 电器 的能耗 ,所 以与 旁路型相 比综合起 来能节
省 5% 0 以上 。
2 软启动器的选型
在此有 必要 区分的是频 繁启动和 不频 繁启动 ,对 于软
染 ; ④ 晶 闸 管 作 为 主 开 关 元 件 长 期 工 作 其 可 靠 性 远 低 于 机
过 智 能 控 制 器 实 现 了机 械 触 头 无 电 弧 , 使 的 机 械 触 头 的
、
【 l l 【
、
]
一 一
电 寿 命 等 于 机
械 寿 命 , 解 决 了 接 触 器 长 期
异步电动机软启动及节能运行控制研究设计

1 引言目前在工矿企业中使用着大量的交流异步电动机(包括380V/660V低压电动机和3KV/6KV中压电动机),有相当多的三相异步电动机及其拖动系统还处于非经济运行的状态,白白地浪费了大量的电能。
究其原因,大致是由以下几种情况造成的:①由于大部分电机采用直接起动方式,除了可能对电网及拖动系统造成冲击和引发事故之外,超出正常8~10倍的起动电流会造成巨大的能量损耗;②在进行电动机容量选配时,往往片面追求大的安全余量,且层层加码,结果使电动机容量过大,造成“大马拉小车”的现象,导致电动机偏离最佳工况点,运行效率和功率因数降低;③从电动机所拖动的生产机械自身的运行经济性考虑,往往要求电力拖动系统具有变压、变速调节能力,若用定速定压拖动,势必造成大量的额外电能损失。
电动机的非经济运行情况,早已引起国家有关部门的重视,并分别于1990年和1995年制定和修定了强制性的国家标准:《三相异步电动机经济运行》(GB12497-1995)。
国家希望依此来规范三相异步电动机的经济运行,国标的发布对低压电动机的经济运行起了很大的促进作用,但对中压电动机则收效甚微。
其原因是:(1)中压电动机一般容量较大,一旦发生故障,其影响也大,因此对节电措施可靠性的要求就更高;(2)中压电动机节电措施受电力电子功率器件耐压水平的限制,节电产品的开发在技术上难度更大一些。
到目前为止,国内尚无成型的中压电动机软起动和节电运行的产品面市。
我国“十五”期间节能计划中关于“电动机系统节能计划”指出:电动机是量大面广的高耗能设备,我国电动机的总装机容量已达4亿kW,年耗电量达6000亿kWh,约占工业耗电量的80%。
我国各类在役电机中,80%以上为0.55~200kW以下的中小型异步电动机,其中相当于世界近代技术水平的JO2系列的电动机约占70%,相当于70年代末水平的Y系列电动机不足30%,具有80年代水平的YX系列高效电动机所占的比例则更是微乎其微。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2期(总第165期)2011年4月机械工程与自动化M ECHAN IC AL EN GIN EERIN G & A U TO M A T IO N N o.2Apr.文章编号:1672-6413(2011)02-0144-02三相异步电动机软启动器的设计刘芳霞(山东经贸职业学院,山东 潍坊 261011)摘要:三相异步电动机直接启动时,启动电流过大,转矩较小,给用电设备及电网带来了一定的影响。
通过采用模糊控制与P LC 相结合的方法实现了电机的软启动,给出了软启动控制系统的硬件设计与软件设计,并用M A T L A B 软件进行实验仿真,实验结果验证了系统的有效性及理论的正确性。
关键词:软启动;三相异步电动机;仿真中图分类号:T M 343+.2 文献标识码:A收稿日期:2010-08-31;修回日期:2010-10-27作者简介:刘芳霞(1975-),女,山东聊城人,讲师,硕士。
0 引言三相异步电动机以其低成本、高可靠性和易维护等特点,在电力拖动系统中得到了广泛的应用。
但在其直接启动瞬间启动电流大约是额定电流的6倍,带负载启动时甚至达到8倍。
大的启动电流会给电网及用电设备带来很大的负面影响,使电网电压产生波动,加速电动机绕组的绝缘老化,大大降低了电动机的使用寿命,导致大量的能量被消耗。
针对上述问题,本文设计了一个软启动系统,给出了其硬件设计及软件设计,并通过实验验证了系统的有效性及理论的正确性。
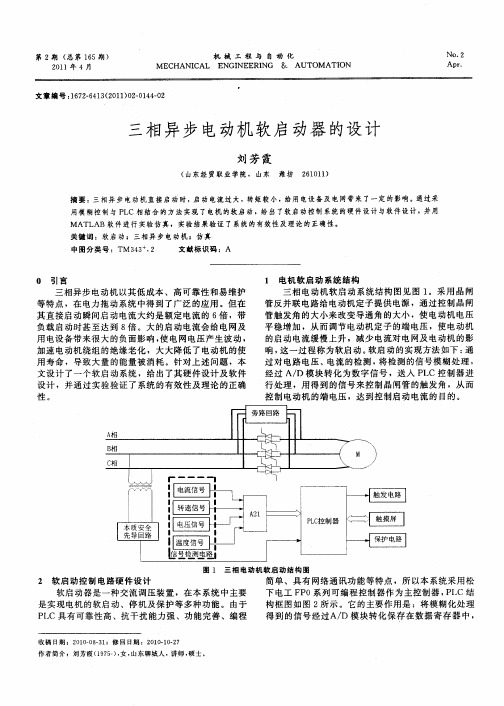
1 电机软启动系统结构三相电动机软启动系统结构图见图1。
采用晶闸管反并联电路给电动机定子提供电源,通过控制晶闸管触发角的大小来改变导通角的大小,使电动机电压平稳增加,从而调节电动机定子的端电压,使电动机的启动电流缓慢上升,减少电流对电网及电动机的影响,这一过程称为软启动。
软启动的实现方法如下:通过对电路电压、电流的检测,将检测的信号模糊处理,经过A /D 模块转化为数字信号,送入PLC 控制器进行处理,用得到的信号来控制晶闸管的触发角,从而控制电动机的端电压,达到控制启动电流的目的。
图1 三相电动机软启动结构图2 软启动控制电路硬件设计软启动器是一种交流调压装置,在本系统中主要是实现电机的软启动、停机及保护等多种功能。
由于PLC 具有可靠性高、抗干扰能力强、功能完善、编程简单、具有网络通讯功能等特点,所以本系统采用松下电工FP0系列可编程控制器作为主控制器,PLC 结构框图如图2所示。
它的主要作用是:将模糊化处理得到的信号经过A /D 模块转化保存在数据寄存器中,经过执行PLC 程序,用输出信号去控制晶闸管调压电路的触发角。
3 电机软启动系统的软件设计硬件设计是系统的基础,但很大一部分硬件功能由软件来实现,因此软件设计是系统的一个重点。
电机软启动系统的主程序流程图见图3。
图2 PL C结构框图图3 主程序流程图整个程序在执行时包括3部分,即系统初始化、系统自检、执行程序。
(1)系统初始化程序。
系统初始化主要是在程序执行前对PLC 内部存储器的内容复位,主要完成对PLC 内部定时器、数据寄存器、中断系统、堆栈指针、特殊寄存器的初始化等。
在本系统中,采用触摸屏实现了人机对话,从触摸屏上输入输出。
在初始化过程中,触摸屏自动返回到初始屏,等待用户对其进行操作。
(2)系统自检程序。
为了保证系统的正常和安全运行,对于一些可能出现的系统故障尽量在系统运行前就发现并及时进行处理,因此在主程序的初始化后进行系统的初始自检是很重要的。
系统初始自检包括上电前自检与上电后自检,前者是检查电动机是否存在漏电故障,后者是对电机的工作电压、电流、温度等参量进行AD 检测并处理。
(3)系统运行部分程序设计。
运行部分程序的设计内容按系统启动的大体流程包括:①判断是否要求启动(检测启动开关是否有效);②判断启动是否完毕(通过触摸屏提示);③判断系统稳定启动运行时是否要求停机(检测停车开关是否有效)。
本文将模糊控制技术和PLC 相结合,对一些无法建立精确数学模型的系统能够达到较好的控制效果。
首先将电流偏差e 与电流偏差变化率Δe 模糊化处理,根据模糊语言变量赋值表和模糊控制规则表,利用M AT LAB 预先编制程序进行模糊推理与模糊判断,得到对应的量化因子K e 、K ec ,然后采用A /D 转化模块将其按一定规律存放在PLC 数据寄存器中。
控制执行时,PLC 只须对采样得到的精确量e 、Δe 进行等级量化,得到其相应的模糊化论域元素,再通过查表获得输出控制量的量化值,最后将此量化值乘以比例因子K u 即得到实际输出量,用输出量对电动机软启动进行控制。
4 实验结果与分析电动机软启动过程是一个高阶、非线性和强耦合的多变量系统,除理论分析以外,仿真实验是一种必不可少的重要的研究方法。
本文采用M ATLAB 软件对三相异步电动机的软启动进行实验仿真,结果见图4~图7。
图4 三相定子电流I 的波形曲线图5 A 相定子电流I A 的波形曲线(下转第148页)·145· 2011年第2期 刘芳霞:三相异步电动机软启动器的设计种故障状态:①工作台超限位:这时工作台前进(后退)按钮的指示灯亮,选择系统的手动工作方式,控制工作台沿反方向退出超限位;②电动机超载:将液压电动机、主轴电动机、工件旋转电动机的断路器常开辅助触点串接作为输入信号,只要有一个断路器出现过载跳闸,该输入信号立即通过PLC程序停止机床的运动状态,待电动机过载问题解决,3个断路器的常开辅助触点闭合后,工作台才能正常运动。
5 结束语用PLC和变频器共同参与机床的电气控制,调试阶段可以方便地修改相关的电气控制参数,根据控制要求增减输入、输出的控制信号,根据工艺要求调整运行程序,便于更改线路,极大地减轻了调试阶段的工作量;借助于PLC的输入、输出信号指示灯,使维修工作直观、简单,而且使用PLC后,省去了中间继电器,使得整机运行稳定,使用效果良好。
Roller Polishing Machine Electrical ControlSystem Based on PLC and InverterGAO Xiao-lin(J in z h ong V ocational and Technical Colleg e,J in z h ong030600,China)Abstract:T his a rticle intr oduced the str uctur e and w o rking principle o f a r oller po lishing machine,a s w ell a s the debug ging pro cess o f electric co ntro l sy stem based o n PL C and inv erter,solv ing th e pro blem in tr aditio na l relay circuit.The o per atio n o f th e machine is stable a nd r elia ble,with favo ra ble r esults.Key words:electrica l co ntro l;polishing machine;PL C;inv er ter(上接第145页)从图4~图7中的参数变化来看,该控制系统实现了三相异步电动机的软启动,即启动电流小、启动转矩大的要求。
用模糊控制实现对异步电动机软启动控制的方法,具有较好的动态性能,且控制规则简单,能够较好地克服直接启动存在的缺点,提高了整个系统的可靠性。
图6 转速n的变化曲线图7 启动时转矩T的变化曲线参考文献:[1] 郝世勇.M A T L A B电机仿真精华50例[M].北京:电子工业出版社,2007.[2] 张水利,李付亮.电机与电力拖动[M].北京:北京理工大学出版社,2007.[3] 李建平,王晓冲,谢敬华.基于P LC的模糊参数自整定温度控制系统研究[J].微计算机信息,2007(6):21-25.Design of Soft-starter of Three-phase Asynchronous MotorLIU Fang-xia(Shandong Economic and Trad e V ocational College,W eifang261011,China)Abstract:It bring s a cer tain impact on po w er equipment and pow er g rids fo r the la rg er star ting cur rent and smaller tor que whe n a thr ee-phase asy nchro nous mo to r sta rts dir ectly.In this paper,by co mbining fuzzy co ntro l and PL C,the so ft sta rt o f th e mo to r is achiev ed.The desig n o f ha rdwa re and so ftwa re o f the soft-sta r t co ntro l sy stem is intro duced,and the so ft-star t contr ol system is simula ted by M A T L A B,a nd the ex perimental w av e fo rm is o btained.The ex pe rimental results v erify the effec tiv eness o f the system and the accuracy of the theo ry.Key words:so ft star t;th ree-phase asynchro no us mo to r;simulatio n·148· 机械工程与自动化 2011年第2期 。