基于PLC的PID温度智能控制系统的研究
基于PLC的温度PID-模糊控制系统设计与仿真
实现对温度 的控制 , 并且使其算法在 P C中通过软件 L
来实现 。
1 控 制器 的设计
1 1 总 体设 计 方 案 . .
Байду номын сангаас
对于温度控制系统 , 由于受控系统对控制量 的作 用反应较慢 , 工程上通常使用一阶惯性时滞模 型作 为 其系统模型 。由于实际生产过程给定值假设为 , 在
2l 0 1年 6月
农 机 化 研 究
第 6期
基 于 P C 的 温 度 P 一模 糊 控 制 系 统 设 计 与 仿 真 k I D
陈水生 ,孟庆髫
( . 江康 恩 贝制 药 股 份 有 限公 司 ,浙 江 兰溪 3 1 0 1浙 2 9;2石 河 子 大学 机 械 电气 工程 学 院 ,新 疆 石 河 子 1 摘 820 3 0 0)
收稿 日期 :2 1 0 0—0 8—1 7
通常在语 言变量 的论 域上将 其划 分为有 限 的 几档 , 可将 E,C和 划分为负大 、 E 负中、 负小 、 、 零 正 小 、 中和正 大 , 用 简化 表示 为 { B N N , E 正 使 N , M, S Z ,
P ,M,B} 因此 , SP P 。 一般 情 况 下 输 入 变 量 取 7个 量 化
等级即可满足控制精度 。若选择较多 的档 , 即对每一 个变量用 较 多 的状态 来描 述 , 定规 则 时就 比较 灵 制 活 , 则也 比较 细致 , 相 应 的规则便 多 了 , 规 但 变复 杂 了, 编制程序就 比较 困难 , 占用的 内存储器容量较 多;
基金项 目 :国家 自然科 学基金项 目( 0 6 0 2 664 0 )
基于PLC的智能化PID控制系统设计

的存储管理 ,针对系统特点采用了改进的数据库访问方式 。整个系统具有高可靠性 、稳定性和安全性。
关键 词 :P L C ;智 能化 ;P I D 控 制 ;数 据采 集
De s i g n O f I n t e l l i g e n t PI D Co n t r o l Sy s t e m Ba s e d o n PL C
科学技术 ( 责任编辑 :郑弱 )
基于 P L C的智能化 P I D 控 制 系统设计
。 闫超 源自( 中核 辽宁 核 电有 限公 司 辽 宁 葫芦 岛 1 2 5 0 0 0) 摘 要 : 介 绍 了智 能化 P I D 控制 系统 的搭 建 和 软件 设计 。上 位 机选 用 V C + + 6 . 0 软 件 开发 多媒 体软 件 界 面 ,实现 系统 的监 控管 理 。下 位机 采用 P L C 智 能化 控制 技 术 ,实 现现 场数 据 的实 时采 集 和现 场设 备 运行 状态 的 自动 控制 。 系统 采用 科 学 的模块 化 管理 模式 ,并 在 后方 建立 实 时数 据库 实现 对数 据
显示 出来。 考虑本系统多媒体智能化控制的现场要求 ,下位机选择台达公司 的D V P 系列的P L C 。上位机 与下位机之 间通过P L C 自 带的P P L 线相连[ 4 ] 。 2 . 2智能 控制 系统 的 主要 功能
s t o r a g e ma n a g e me n t . Ac c o r d i n g t o s y s t e m f e a t u r e s , a n i mp r o v e d a c c e s s mo d e t o t h e d a t a b a s e h a s be e n t a k e n . Th e s y s t e m wa s p r o v i d e d wi t h s t a b i l i t y a n d s e c u it r y .
基于PLC的温度控制系统的设计
1 引言1.1 设计目的温度的测量和控制对人类日常生活、工业生产、气象预报、物资仓储等都起着极其重要的作用。
在许多场合,及时准确获得目标的温度、湿度信息是十分重要的。
近年来,温湿度测控领域发展迅速,并且随着数字技术的发展,温湿度的测控芯片也相应的登上历史的舞台,能够在工业、农业等各领域中广泛使用。
1.2 设计内容主要是利用PLC S7-200作为可编程控制器,系统采用PID控制算法,手动整定或自整定PID参数,实时计算控制量,控制加热装置,使加热炉温度为为一定值,并能实现手动启动和停止,运行指示灯监控实时控制系统的运行,实时显示当前温度值。
1.3 设计目标通过对温度控制的设计,提高在电子工程设计和实际操作方面的综合能力,初步培养在完成工程项目中所应具备的基本素质和要求。
培养团队精神,科学的、实事求是的工作方法,提高查阅资料、语言表达和理论联系实际的技能。
2 系统总体方案设计2.1 系统硬件配置及组成原理2.1.1 PLC型号的选择本温度控制系统采用德国西门子S7-200 PLC。
S7-200 是一种小型的可编程序控制器,适用于各行各业,各种场合中的检测、监测及控制的自动化。
S7-200系列的强大功能使其无论在独立运行中,或相连成网络皆能实现复杂控制功能。
因此S7-200系列具有极高的性能/价格比。
2.1.2 PLC CPU的选择S7-200 系列的PLC有CPU221、CPU222、CPU224、CPU226等类型。
S7-200PLC 硬件系统的组成采用整体式加积木式,即主机中包括定数量的I/O端口,同时还可以扩展各种功能模块。
S7-200PLC由基本单元(S7-200 CPU模块)、扩展单元、个人计算机(PC)或编程器,STEP 7-Micro/WIN编程软件及通信电缆等组成。
表2.1 S7-200系列PLC中CPU22X的基本单元本设计采用的是CUP226。
它具有24输入/16输出共40个数字量I/O点。
基于PLC的温度PID_模糊控制系统设计与仿真
第 6期
图 3 主程序软件设计流程图 Fig. 3 The m ain program sof tw are flow ch art
图 4 主程序选择控制梯形 F ig. 4 Th em ain p rogram con trol ladder d iagram
2. 2 模糊控制程序 此程序段为查模糊控制表程序设计, 根据模糊控
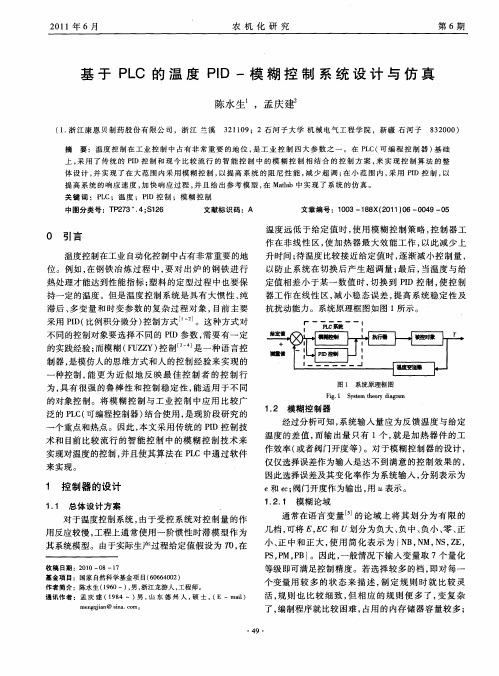
由模糊规则进行推理可以得出模糊控制器语言规 则的输入 输 出关 系, 其关 系 是一 个非 线性 的关 系曲 面。当偏差较大时, 控制量的变化应尽力使偏差迅速 减小; 当偏差较小时, 除了要消除偏差外, 还要考虑系 统的稳定性, 防止系统出现过冲, 甚至引起系统振荡。 由隶属度函数及规则表, 使用 M amdan i推理方法和面 积重心法进 行清晰 化, 可以得 到控 制查 询表, 见 表 2
=
KP [ e( t)
+
1 Ti
t
0 e( t) dt + T D
d
e( t dt
)
]
在 PLC 软件内部有专门的 P ID 编程指令, 因此此
部分控制在软件中直接实现。
50
2011年 6月
农 机化 研 究
2 系统的软件实现与仿真
2. 1 系统主程序 将传感器采集到的信号与设定 值比较, 在远大于
2011年 6月
农 机化 研 究
第 6期
基 于 PLC 的 温 度 P I D - 模 糊 控 制 系 统 设 计 与 仿 真
陈水生1 , 孟庆建2
( 1. 浙江 康 恩 贝 制药 股 份 有 限公 司 , 浙 江 兰 溪 3 21109; 2 石河 子 大 学 机械 电 气 工 程学 院 , 新 疆 石 河 子 83 2000 )
基于plc温度控制系统的设计论文

基于plc温度控制系统的设计论文摘要:本设计论文基于PLC温度控制系统,旨在设计一个可靠、稳定、高效、精确的温度控制系统,应用于实际工业生产中。
通过研究传感器、执行器、控制器等硬件设备的特性和功能,并结合PID控制算法和PLC编程技术,实现对温度的自动控制和实时监测。
关键词:PLC、温度控制系统、PID控制、编程技术Abstract:This design paper is based on the PLC temperature control system with the aim of designing a reliable, stable, efficient, precise temperature control system that can be applied in industrial production. Through research of the characteristics and functions of hardware equipment such as sensors, actuators, and controllers, combined with PID control algorithms and PLC programming technology, we will achieve automatic control and real-time monitoring of temperature.Keywords: PLC, temperature control system, PID control, programming technology一、引言随着科技和工业的进步,现代化工业生产中需要用到大量的自动化控制系统来实现对生产过程的智能控制,提高生产效率和品质,还能有效地降低生产成本。
其中,温度控制系统是工业生产中最常用的自动化控制系统之一。
基于PLC的过程控制实验装置温度模糊PID控制

基于PLC的过程控制实验装置温度模糊PID控制陶 权,谢 彤(广西工业职业技术学院,广西 南宁 530003)摘 要:本文介绍了用S7-200实现过程控制系统实验装置中锅炉夹套的温度模糊控制设计思想,对模糊PID控制的结构、模糊PID控制器的设计、模糊PID控制的PLC实现进行了分析,文中详细介绍了模糊控制器程序的编写方法,结果表明,用PLC 实现的模糊控制器简单实用。
关键词:过程控制系统实验装置;模糊PID;PLC中图分类号:TP273 文献标识码:B 文章编号:1003-7241(2010)10-0022-05T emperature Fuzzy PID Control in the Process ControlExperimental Device Based on PLCTAO Quan, XIE Tong( Guangxi V ocational & Technical Institute of Industry, Nanning 530003 China )Abstract: This article describes design concept of realizing temperature fuzzy control for boiler jackets in the process control system experimental device by using S7-200, in which the structure of fuzzy PID control, fuzzy PID controller designing and PLC implementation of fuzzy PID control are analyzed,and the fuzzy controller programming is also introduced in detail. Results show that the fuzzy controllers consist of PLC are both simple and practical.Key words: process control system experimental device; Fuzzy-PID; PLC1 引言本校自动化实验室采用的“THJ-3型高级过程控制系统实验装置”是基于工业过程的物理模拟对象系统,该系统包括流量、温度、液位、压力等热工参数,可实现系统参数辨识,单回路控制,串级控制,前馈—反馈控制,比值控制,解耦控制等多种控制形式。
基于PLC的温度控制系统的设计
1 引言1.1 设计目的温度的测量和控制对人类平常生活、工业生产、气象预报、物资仓储等都起着极其重要的作用。
在许多场合,及时准确获得目的的温度、湿度信息是十分重要的。
近年来,温湿度测控领域发展迅速,并且随着数字技术的发展,温湿度的测控芯片也相应的登上历史的舞台,可以在工业、农业等各领域中广泛使用。
1.2 设计内容重要是运用PLC S7-200作为可编程控制器,系统采用PID控制算法,手动整定或自整定PID参数,实时计算控制量,控制加热装置,使加热炉温度为为一定值,并能实现手动启动和停止,运营指示灯监控实时控制系统的运营,实时显示当前温度值。
1.3 设计目的通过对温度控制的设计,提高在电子工程设计和实际操作方面的综合能力,初步培养在完毕工程项目中所应具有的基本素质和规定。
培养团队精神,科学的、实事求是的工作方法,提高查阅资料、语言表达和理论联系实际的技能。
2 系统总体方案设计2.1 系统硬件配置及组成原理2.1.1 PLC型号的选择本温度控制系统采用德国西门子S7-200 PLC。
S7-200 是一种小型的可编程序控制器,合用于各行各业,各种场合中的检测、监测及控制的自动化。
S7-200系列的强大功能使其无论在独立运营中,或相连成网络皆能实现复杂控制功能。
因此S7-200系列具有极高的性能/价格比。
2.1.2 PLC CPU的选择S7-200 系列的PLC有CPU221、CPU222、CPU224、CPU226等类型。
S7-200PLC 硬件系统的组成采用整体式加积木式,即主机中涉及定数量的I/O端口,同时还可以扩展各种功能模块。
S7-200PLC由基本单元(S7-200 CPU模块)、扩展单元、个人计算机(PC)或编程器,STEP 7-Micro/WIN编程软件及通信电缆等组成。
表2.1 S7-200系列PLC中CPU22X的基本单元本设计采用的是CUP226。
它具有24输入/16输出共40个数字量I/O点。
毕业设计(论文)-基于PLC实现的水温控制
基于PLC实现的水温控制XXX(陕西理工学院电气工程系自动化专业,2007级2班,陕西汉中723003)指导教师:XXX[摘要]针对工农业生产中现有的水温控制系统可靠性低、控制精度差、成本高等缺点。
我们利用三菱FX0N60-MR型PLC构建了一个水温控制系统对这一问题进行了研究。
在整个控制系统中以电阻炉作为被控对象,以水温为被控变量,以三菱FX0N60-MR型PLC为控制器,输入部分外加光电耦合器,并用按键和数码管构建了人机接口设置目标温度;控制算法的选择经过对模糊控制和PID算法的实验对比,最终选择采用PID。
PLC程序利用梯形图编程语言进行编写。
在系统搭建完成后我们利用试凑法,通过大量实验对PID控制器的参数进行了优化,进过测试系统能够达到设计要求。
除此之外该系统还具有硬件结构简单、系统可靠性高、制作成本低廉、控制器参数易于调试等优点。
能够利用小型PLC实现对水温较高精度的控制。
[关键词]PLC 温度控制PIDPLC-based temperature control to achieveLiao zhong lin(Grade 07,Class2,Major Automation,Department of Electrical Engineering,Shaanxi University ofTechnology,Hanzhong 723003,Shaanxi)Tutor: Liu pei[Abstract] According to the existing water temperature in the industry and agriculture production control system reliability, low cost, high control precision poor shortcomings. We use mitsubishi FX0N60-MR type PLC has constructed a water temperature control system for this problem is studied. In the whole control system to resistance furnace as controlled object to water temperature as controlled variables, the mitsubishi FX0N60-MR type PLC as the controller, input part plus photoelectric couplers, buttons and digital tube and constructing the man-machine interface set target temperature; The choice of control algorithm based on fuzzy control and PID algorithm experimental, finally choosing PID. PLC program use ladder diagram programming language to write. After the completion of the structures in the system we use trail-and-error, through a large number of experiments of PID controller parameters are optimized, the test system can meet the design requirements. Besides this system also has the hardware structure is simple, system reliability high, production cost is low, and the controller parameters is easy to debug, etc. Can use small PLC to control the water temperature higher accuracy.[Key words] PLC temperature control PID目录绪论 (1)1.设计方案的论证 (2)1.1PLC的选型 (2)1.1.1常用PLC的特点比较 (2)1.1.2本设计PLC的选型 (3)1.2控制方案的选择 (3)1.2.1采用模糊控制的温度控制 (3)1.2.2采用PID算法的温度控制 (3)1.2.3 控制方案的选择 (4)2.硬件电路的设计 (5)2.1PLC硬件资源分配设计 (5)2.2温度传感器 (8)2.2.1 利用温度变送器采集 (8)2.2.2 利用DS18B20采集 (8)2.3输入部分电路设计 (10)2.3.1 设置输入部分电路设计 (10)2.3.2 AD转换结果输入部分电路设计 (10)2.4输出部分电路设计 (10)3.系统软件的设计 (13)3.1PLC编程语言简介 (13)3.2输入部分程序设计 (15)3.3显示部分程序 (15)3.4PID运算部分程序设计 (15)4.系统的调试 (19)4.1硬件调试 (19)4.2软件调试 (19)4.1软硬件联合调试 (19)4.3实验数据 (19)参考文献 (20)英语科技文献翻译 (21)附录 (34)附录A:源程序 (34)附录B:元器件清单 (37)附录C:电路总图 (38)附录D:实物图 (39)致谢 (40)绪论温度控制系统在各行各业的应用虽然很广泛,但从国内生产的温度控制器来讲,总体发展水平仍然不高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 4 偏差及偏差变化率区域划分
M7 区 :加最大区 ,偏差太大 ,应最大限度地增加控制
图 5 M 1~M 7, M 8~M 10的区域划分
M achine B uilding A utomation, D ec 2008, 37 (6) : 152~154
·153·
上述 K1 , K2 , K3 , K4 为系数 ,它们直接影响控制性 能 ,根据控制趋势 ,应有 K1 > K2 > K3 ≥0, K4 ≥0。当 K4 = 0时 ,不考虑提前减小控制量 ;当 K3 = 0时 , 不考虑增加控 制量 ,上述系数根据系统实际确定 。 PLC温度控制系统如 图 3所示 。
3 温度控制应用
采用智能 P ID 控制算法 ,以 PLC作为核心部件 ,实现 恒温控制 。系统的控制原理框图如图 3所示 。温度检测 器由 PT100铂电阻构成 ,用来实时检测温度输出 ,经 RTD 模块放大后送给 A /D 转换模块 。A /D 转换采用 FX2N 2 4AD完成 ,该模块有 4 个模拟量输入通道 , 12 位的分辨 率 ,总体精度在 + 1% ,转换速度 15 m s/通道 。转换后的数 据存入 PLC内部数据寄存器 。 PLC根据采集的信号计算 出偏差 e ( t)和偏差变化率 ec ( t) ,按照智能 P ID 的控制规 则计算控制量 u ( t) ,并输出控制量 u ( t) 。经 PLC的 D /A 转换 ,变换成 0 ~5 V 的电压信号 ,送至调压模块 SSR,并 驱动调压模块以调节电加热丝的工作电流 ,实现系统的温 度控制 。D /A 转换模块采用 FX2N 24DA ,核模块有四通道 的 D /A 输出 ,总体精度 + 1% ,转换速度 2. 1 m s。在温度 采集时 ,运用 FROM ( FNC78)指令采样 5 次求平均值 ,在 软件上设计数字滤波程序 ,实现每个通道数据的均值滤
Abstract: In view o f indu s tria l p ro duc tio n re qu ire d h igh s ta b le fre que n tly a nd co n s ta n t tem p e ra tu re e nviro nm en t, the tra d itio na l s im u la 2 tio n2like p ro be tem p e ra tu re co n tro l a nd s im p le P ID a re d ifficu lt to re a ch the ide a l fluc tua tio n. Th is p ap e r p ropo se s tha t PLC is ta ke n a s the co re o f the temp e ra tu re co n tro l system to o b ta in PLC tem p e ra tu re co n tro l d ia g ram and re g io na lism cha rt th ro ugh a na lysis o f P ID co n tro l p rinc ip le a nd ru le , co n tro l a lgo rithm and re g io na lism. Key words: P ID; PLC; tem p e ra tu re; in te lligen t co n tro l
图 2 偏差及趋势 [ 3]
d) 若 em in < | e ( t) | < emax ,且 e ( t) ·ec ( t) = 0,则 u ( t) = u ( t - 1) + K2 e ( t) 。偏差值恒定不变 ,呈稳定状态 ,应增 加较小的控制量 ,使偏差减小 。
e) 若 emin < | e ( t) | < emax ,且 e ( t) ·ec ( t) < 0, 则 u ( t) = u ( t - 1) + K3 e ( t) + K4 ec ( t) / e ( t) 。实际值正不断接近 设定值 ,一方面随着偏差减小 ,相应的控制量可以增加很小 或者不增加 ;另一方面 , | ec ( t) / e ( t) |值越大 ,表明实际值趋 向设定值的程度越强 ,为防止过冲 ,应适当减小控制量 。
1 P ID 的控制原理及控制规则
智能 P ID控制就是将智能控制 ( intelligent control)与 传统的 P ID控制相结合 ,是自适应的 ,其控制器参数可以实 时地在线自动调整 ,不依赖系统精确数学模型 ,对系统参数 变化具有较好的适应性 ,具有较强的鲁棒性和抗干扰能力 。 智能 P ID控制主要有模糊 P ID 控制 、专家 P ID 控制和基于 神经网络的 P ID控制等 ,这里主要运用专家 P ID控制 。
作者简介 :李景福 (1962— ) ,男 ,湖南嘉禾人 ,郴州职业技术学院工业自动化系副教授 ,研究方向为机电与电子技术应用。
·152·
http: ∥ZZHD. chinajournal. net. cn E2mail: ZZHD@ chainajournal. net. cn《机械制造与自动化 》
0 引言
在工业生产中经常需要高稳定度的恒温环境 ,传统的 模拟式仪表温度控制 ,以简单的 P ID来实现 ,此类仪表对环 境条件和控制参数较敏感 ,较难达到理想的波动度 ,即使能 达到要求的波动度时 ,也需要较长的过渡时间 。常规的 P ID调节具有结构简单 ,稳定性好 ,可靠性高 ,易于工程实 现等优点 ,其主要问题是参数整定问题 ,一旦整定计算好 后 ,在整个控制过程中都是固定不变的 ,而在实际系统中 , 由于系统状态和参数等发生变化 ,控制过程具有大滞后 、非 线性 、时变性 ,采用常规 P ID 控制较难获得最佳的控制效 果 。 PLC为核心的温度控制系统 ,采用了专家智能 P ID 控 制方法 ,利用专家系统知识库输出修正 P ID 参数以及改变 P ID控制方式 。实践表明用 PLC实现的智能 P ID 控制 ,方 法简单易行 、适应性好 、鲁棒性强 [1, 2 ] 。
图 3 PLC温度控制系统 [ 3]
对控制规律进行了以上的分段处理后 ,可在实际温度 与设定温度偏差较大时 ,以较大的速度平缓的升温或降 温 。在接近恒温时又不会因太大的惯性而引起振荡 ,从而 减少了过渡过程的时间 。
2 控制算法与区域划分
a) 控制算法 :设数据寄存器 D0 ~D5 分别存储偏差 值 e1~e6, D6~D7分别存储偏差变化率 ec 1~ec 2。
专家 P ID控制的结构图如图 1所示 :由于产生式规则 库结构简单 ,易于修改 ,适合于 PLC实现 ,故控制器中的 知识规则采用产生式规则 ,其基本形式为 :
图 1 专家 P ID 控制结构图
IF (条件 ) , THEN (动作 ) 数据库的事实知识选取如下数 据 : e ( t) , ec ( t) , u ( t) , em in , emax , umax。其中 : e ( t) 是偏差 , e ( t) = SV (设定 温度值 ) - PV (实际温度值 ) ; ec ( t)是偏差变化率 , ec ( t) = e ( t) - e ( t - 1 ) ; u ( t) 是控制量 ; em in是最小允许偏差 ; emax 是最大允许偏差 ; umax是最大控制量 。 利用上述数据 ,构成有关的知识库 ,事实知识的构成 简单而无相交集 ,因此任何情况都能找到唯一的匹配条 件 ,触发相应的控制规则 。控制规则及依据如下 [3~5 ] : a) 若 | e ( t) | > emax ,则 u ( t) = umax。说明偏差过大 ,则 相应控制量应最大 ,加快升温速度 ,尽快减小偏差 。 b) 若 | e ( t) | < em in ,则 u ( t) = u ( t - 1 ) 。说明偏差已 达到允许范围 ,控制量不变 ,维持现状 。
·电气技术与自动化 ·
李景福 ,等 ·基于 PLC的 P ID温度智能控制系统的研究
基于 PLC的 P ID温度智能控制系统的研究
李景福 ,孙伟春
(郴州职业技术学院 ,湖南 郴州 423000)
摘 要 :针对工业生产中经常需要高稳定度的恒温环境 ,传统模拟式的仪表温度控制及简单的 P ID较难达到理想的波动度 ,通过对 P ID 的控制原理及控制规则 、控制算法与区域划分的分析 , 提出一种以 PLC为核心的温度控制系统 ,得到了 PLC温度控制系统图和区域划分图 。 关键词 : P ID; PLC;温度 ;智能控制 中图分类号 : TH706; TP273 +. 5 文献标识码 : B 文章编号 : 167125276 (2008) 0620152203
c) 控制量的修正 :由于被控温度是一个连续变化的 物理量 ,不可能在相邻几个控制周期里发生大的突变 ,所 以控制量也不应发生大的突变 。基于此 ,为防止由于温度 测量不准确而使计算出的控制量 u ( t)波动过大 ,影响恒 温效果 ,在 P ID 控制阶段按照 u ( t) = u ( t - 1) +Δu计算 出 u ( t) 对其进行修正 。
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
·电气技术与自动化 ·
李景福 ,等 ·基于 PLC的 P ID温度智能控制系统的研究
ቤተ መጻሕፍቲ ባይዱ
c) 若 emin < | e ( t) | < 0,则 u ( t) = u ( t - 1) + K1 e ( t) ,根 据偏差及偏差变化趋势图 2可知 ,实际值正远离设定值 ,控 制量明显减小 ,应增加较大的控制量 ,尽快减小偏差 。